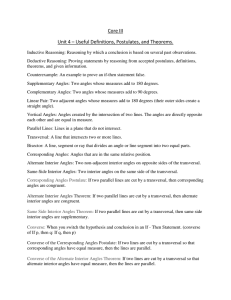
Plane Geometry - Answer Explanations
... than 4 inches (the difference of 9 and 5). Note that 4 and 13 themselves are not possible values for the third side, as the inequality is non-inclusive. Sum of Angles: The sum of the angles in any triangle is 180˚. Area: A = (1/2)hb where h is the triangle’s height and b is the triangle’s base. Note ...
... than 4 inches (the difference of 9 and 5). Note that 4 and 13 themselves are not possible values for the third side, as the inequality is non-inclusive. Sum of Angles: The sum of the angles in any triangle is 180˚. Area: A = (1/2)hb where h is the triangle’s height and b is the triangle’s base. Note ...











AnglesLessonforSmartBoard
... Corresponding Angles Angles on the same side of the transversal and in the same position on the parallel lines (either the angles are both above or both below the parallel lines.) Since the five types of angles describe angle relationships, we can only classify PAIRS of angles as Alternate Interior ...
... Corresponding Angles Angles on the same side of the transversal and in the same position on the parallel lines (either the angles are both above or both below the parallel lines.) Since the five types of angles describe angle relationships, we can only classify PAIRS of angles as Alternate Interior ...