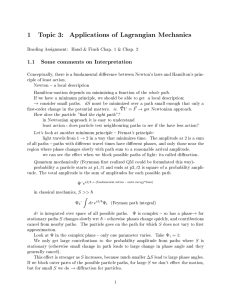
1 Topic 3: Applications of Lagrangian Mechanics
... There are also interesting situations where the constraints are imposed on the generalized velocities, and these cannot be integrated to give functional relationships between the coordinates. An example is a rolling constraint of a wheel on a 2D plane. The angle through which the wheel has rotated i ...
... There are also interesting situations where the constraints are imposed on the generalized velocities, and these cannot be integrated to give functional relationships between the coordinates. An example is a rolling constraint of a wheel on a 2D plane. The angle through which the wheel has rotated i ...



Brief review of Newtonian formalism 1 Newton`s Laws of Motion 2
... 4. Normal (constraint) forces: such forces act on a body which is constrained to move in a certain way by other bodies. Typical examples are: a) if the body is tied to a fully extended string or wire, there is a force, called tension, acting upon the body, along the direction of the wire. The magnit ...
... 4. Normal (constraint) forces: such forces act on a body which is constrained to move in a certain way by other bodies. Typical examples are: a) if the body is tied to a fully extended string or wire, there is a force, called tension, acting upon the body, along the direction of the wire. The magnit ...

Here
... However, the effective theory only applies in the low-energy limit E ≪ Eg, where Eg is the gap of the surface state Assuming a FM-TI interface at z = 0, normally incident, linearly-polarized light in either region can be written as (primed variables belong to the TI): ...
... However, the effective theory only applies in the low-energy limit E ≪ Eg, where Eg is the gap of the surface state Assuming a FM-TI interface at z = 0, normally incident, linearly-polarized light in either region can be written as (primed variables belong to the TI): ...


On the dynamics of charged particles around rotating magnetic
... in the explanation of the dynamics of light particles (ions or electrons) which are present in the radiation belts surrounding magnetized planets [5]. However, when charged dust grains are considered, the ratio between the charge and the mass of the particle is small and the purely magnetic model ha ...
... in the explanation of the dynamics of light particles (ions or electrons) which are present in the radiation belts surrounding magnetized planets [5]. However, when charged dust grains are considered, the ratio between the charge and the mass of the particle is small and the purely magnetic model ha ...


Lecture 14: Noether`s Theorem
... Lecture 14: Noether’s Theorem • In our review of Newtonian Mechanics, we were reminded that some quantites (energy, linear momentum, and angular momentum) are conserved – That is, they are constant if no external influence acts on a ...
... Lecture 14: Noether’s Theorem • In our review of Newtonian Mechanics, we were reminded that some quantites (energy, linear momentum, and angular momentum) are conserved – That is, they are constant if no external influence acts on a ...


Chapter 3: The Basics of Classical Mechanics
... time and thus the Hamiltonian is not the total energy of the system. However, if the Lagrangian is not an explicit function of time, the Hamiltonian is still a constant of the motion. One standard way of proceeding with a classical mechanics problem is to find the Lagrangian by determining the poten ...
... time and thus the Hamiltonian is not the total energy of the system. However, if the Lagrangian is not an explicit function of time, the Hamiltonian is still a constant of the motion. One standard way of proceeding with a classical mechanics problem is to find the Lagrangian by determining the poten ...

Overview Chapter 1 & 2 1
... Signatures of a particle in motion and their mathematical representations Velocity, Acceleration, Kinematics Choice of coordinate systems that would ease out a calculation. Cartesian and (Plane) Polar coordinate Importance of equation of constraints Some application problems ...
... Signatures of a particle in motion and their mathematical representations Velocity, Acceleration, Kinematics Choice of coordinate systems that would ease out a calculation. Cartesian and (Plane) Polar coordinate Importance of equation of constraints Some application problems ...

Canonical Quantum Gravity as a Gauge Theory with Constraints
... a class of field theories that are in some ways generalizations of Maxwell’s electrodynamics. Taking the place of the matter fields in this gauge theory will be the “field of frames” eI , or, a choice of four arrows at each spacetime point representing perpendicular directions. The role of the gauge ...
... a class of field theories that are in some ways generalizations of Maxwell’s electrodynamics. Taking the place of the matter fields in this gauge theory will be the “field of frames” eI , or, a choice of four arrows at each spacetime point representing perpendicular directions. The role of the gauge ...

Lecture Notes on Classical Mechanics for Physics 106ab – Errata
... where the (c) superscript restricts the sum to constraint forces but the sum is over all constraint forces and all particles. with the new text At this point, we specialize to constraints that do no net work when a virtual displacement is applied. This assumption is critical. Making this assumption ...
... where the (c) superscript restricts the sum to constraint forces but the sum is over all constraint forces and all particles. with the new text At this point, we specialize to constraints that do no net work when a virtual displacement is applied. This assumption is critical. Making this assumption ...
Lagrange`s equations of motion in generalized coordinates
... The Hamiltonian of the system is equaled to the total energy only if the following conditions are met: 1. The system is scleronomic; ie the equations of the transformation connecting the Cartesian and generalized coordinates must be independent of time (the kinetic energy is then a quadratic funct ...
... The Hamiltonian of the system is equaled to the total energy only if the following conditions are met: 1. The system is scleronomic; ie the equations of the transformation connecting the Cartesian and generalized coordinates must be independent of time (the kinetic energy is then a quadratic funct ...
GDC2007_Catto_Erin_Physics1
... Friction is like a velocity-only motor. The target velocity is zero. C vp t v ω p x t T ...
... Friction is like a velocity-only motor. The target velocity is zero. C vp t v ω p x t T ...

Kid Wind Design Challenge
... Design Statement (How are you going to solve this problem? Include the process you are going to take to solve the given problem) : We are going to design wind turbines to generate electricity so we don’t have to burn as much fossil fuels. ...
... Design Statement (How are you going to solve this problem? Include the process you are going to take to solve the given problem) : We are going to design wind turbines to generate electricity so we don’t have to burn as much fossil fuels. ...