Question Bank
... 6. Draw the typical temperature rise-time curve and derive the equation for temperature rise in an electric drive.(16) 7. Explain the loading of an electric motor and its duty cycle with a simple diagram.(16) 8. Explain in detail about the various types of electric drives.(16) 9. (a).AT full load o ...
... 6. Draw the typical temperature rise-time curve and derive the equation for temperature rise in an electric drive.(16) 7. Explain the loading of an electric motor and its duty cycle with a simple diagram.(16) 8. Explain in detail about the various types of electric drives.(16) 9. (a).AT full load o ...
The Belly Dancer Manual_IB51000 Manual.qxd
... carefully packaged and thoroughly inspected before leaving the factory. Responsibility for its safe delivery was assumed by the carrier upon acceptance of the shipment; therefore, claims for loss or damage sustained in transit must be made with the carrier. NOTE: Carefully inspect all items in the p ...
... carefully packaged and thoroughly inspected before leaving the factory. Responsibility for its safe delivery was assumed by the carrier upon acceptance of the shipment; therefore, claims for loss or damage sustained in transit must be made with the carrier. NOTE: Carefully inspect all items in the p ...

Supplementary Information (doc 560K)
... parabolic current dependence of the second-harmonic signal also supports the thermal nature of the obtained spin signal. The observed tiny spin signal in the first-harmonic voltage originated from the inhomogeneous current distribution around the junction. A partial current flowing in the ferromagne ...
... parabolic current dependence of the second-harmonic signal also supports the thermal nature of the obtained spin signal. The observed tiny spin signal in the first-harmonic voltage originated from the inhomogeneous current distribution around the junction. A partial current flowing in the ferromagne ...

Discrete PI and PID Controller Based Three Phase Induction Motor
... Induction motors are widely used in industries due to its robust construction and low maintenance. Separately excited dc drives are simpler in control because independent control of flux and torque can be brought about. In contrast, induction motors involve a coordinated control of stator current ma ...
... Induction motors are widely used in industries due to its robust construction and low maintenance. Separately excited dc drives are simpler in control because independent control of flux and torque can be brought about. In contrast, induction motors involve a coordinated control of stator current ma ...

Controller Analysis with Inverted Pendulum
... pendulum is sufficient to control its angle at an unstable equilibrium with statics and force impulses, and through different approaches and choice of controller find the most suitable one for these types of applications. The controllers that was tested was, the PID regulator and the state space reg ...
... pendulum is sufficient to control its angle at an unstable equilibrium with statics and force impulses, and through different approaches and choice of controller find the most suitable one for these types of applications. The controllers that was tested was, the PID regulator and the state space reg ...

Systems SYSTEM ANALOGIES
... The behavior of the system in Fig. 3 is in fact exactly the same as the behavior of the system in Fig. 1. When the input (current source) steps up, the input current doesn’t match the inductor current, which is still zero, so initially the difference goes through the resistor, and a voltage (v = iR) ...
... The behavior of the system in Fig. 3 is in fact exactly the same as the behavior of the system in Fig. 1. When the input (current source) steps up, the input current doesn’t match the inductor current, which is still zero, so initially the difference goes through the resistor, and a voltage (v = iR) ...
Topic Constructing response curves: Introduction to the
... The phase responses have a constant phase shift over the whole frequency range with values of 0° (displacement), 90° (velocity), or 180° (acceleration). 2.3 The preamplifier The preamplifier is a first order LOW Pass. Its corner frequency is beyond the signal range of seismology - up to several 10 k ...
... The phase responses have a constant phase shift over the whole frequency range with values of 0° (displacement), 90° (velocity), or 180° (acceleration). 2.3 The preamplifier The preamplifier is a first order LOW Pass. Its corner frequency is beyond the signal range of seismology - up to several 10 k ...

Field tests of 3-Component geophones
... same scalar multiplier was used in each panel. Within each group, the trace order is Oyo, Litton and Geosource consecutively from right to left. The most obvious feature of the data in Figure 3 is that the outputs from the three geophones are very similar for all three components, except that the Oy ...
... same scalar multiplier was used in each panel. Within each group, the trace order is Oyo, Litton and Geosource consecutively from right to left. The most obvious feature of the data in Figure 3 is that the outputs from the three geophones are very similar for all three components, except that the Oy ...

Modélisation de la MSAP
... regulators PI. While for speed, we choose a regulator PI with anti-windup in order to control this variable during the transition phase. The PI regulator choice contributes to find the decoupling quality between the two axes d and q. The quadrature current reference iq* is provided by a speed PI reg ...
... regulators PI. While for speed, we choose a regulator PI with anti-windup in order to control this variable during the transition phase. The PI regulator choice contributes to find the decoupling quality between the two axes d and q. The quadrature current reference iq* is provided by a speed PI reg ...

MAE106 Laboratory Exercises Lab # 4 - P
... law and control gains in software. Then, changing the control law just involves typing in new software code. This will be really useful for your final project. Note that an alternate way to set up controllers is with analog circuit elements, such as op-amps. Such controllers respond more quickly tha ...
... law and control gains in software. Then, changing the control law just involves typing in new software code. This will be really useful for your final project. Note that an alternate way to set up controllers is with analog circuit elements, such as op-amps. Such controllers respond more quickly tha ...

an automatic system for electrodynamic shaker control by
... Salehzadeh-Nobari et al. (1997) presented an adaptive control on the frequency domain. The authors stated that the correct choice of the control technique is dependent on the system modelling assumptions and using available high level software tools the adaptive inverse control technique shows to be ...
... Salehzadeh-Nobari et al. (1997) presented an adaptive control on the frequency domain. The authors stated that the correct choice of the control technique is dependent on the system modelling assumptions and using available high level software tools the adaptive inverse control technique shows to be ...
ADXL322.pdf
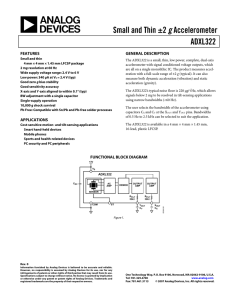
... The ADXL322 is a complete acceleration measurement system on a single monolithic IC. The ADXL322 has a measurement range of ±2 g. It contains a polysilicon surface micromachined sensor and signal conditioning circuitry to implement an openloop acceleration measurement architecture. The output signal ...
... The ADXL322 is a complete acceleration measurement system on a single monolithic IC. The ADXL322 has a measurement range of ±2 g. It contains a polysilicon surface micromachined sensor and signal conditioning circuitry to implement an openloop acceleration measurement architecture. The output signal ...

Implementing Positioning Algorithms Using Accelerometers
... considered when implementing this kind of algorithm in a “real world” implementation. • The signal is not noise free so it must be digitally filtered. The filter used in this algorithm is a moving average; the value to be processed is the result of averaging a certain amount of samples. • Even with ...
... considered when implementing this kind of algorithm in a “real world” implementation. • The signal is not noise free so it must be digitally filtered. The filter used in this algorithm is a moving average; the value to be processed is the result of averaging a certain amount of samples. • Even with ...
Vakratundam Mahakayam
... • Integral control (time integral of speed is distance) – Helps the car deal with hills, and settle into the correct speed – If car goes up a hill, proportional control helps, but may still slow the car down; the longer the car stays at a slower speed, the more the integral control, and therefore th ...
... • Integral control (time integral of speed is distance) – Helps the car deal with hills, and settle into the correct speed – If car goes up a hill, proportional control helps, but may still slow the car down; the longer the car stays at a slower speed, the more the integral control, and therefore th ...
Brochure
... provided with the program along with the opportunity to plot the nominal electrical and mechanical torque curves prior to starting the motor. ...
... provided with the program along with the opportunity to plot the nominal electrical and mechanical torque curves prior to starting the motor. ...

PROCEDURE 2 (large motors)
... Caution: this is a rule of thumb only. Different motor dynamics may alter this configuration. Never move the feedback device more than a few degrees in any direction without rechecking the output voltage balance. Time and patience are your friend here, attempting to rush this procedure will frustrat ...
... Caution: this is a rule of thumb only. Different motor dynamics may alter this configuration. Never move the feedback device more than a few degrees in any direction without rechecking the output voltage balance. Time and patience are your friend here, attempting to rush this procedure will frustrat ...

DMC-40x0 Ethernet/RS232 Series, 1
... compensation with velocity and acceleration feedforward, multitasking for simultaneously running up to eight programs, and I/O processing for synchronizing motion with external events. Modes of motion include point-to-point positioning, position tracking, jogging, linear and circular interpolation, ...
... compensation with velocity and acceleration feedforward, multitasking for simultaneously running up to eight programs, and I/O processing for synchronizing motion with external events. Modes of motion include point-to-point positioning, position tracking, jogging, linear and circular interpolation, ...

DMC - 40x0 - Galil Motion Control
... compensation with velocity and acceleration feedforward, multitasking for simultaneously running up to eight programs, and I/O processing for synchronizing motion with external events. Modes of motion include point-to-point positioning, position tracking, jogging, linear and circular interpolation, ...
... compensation with velocity and acceleration feedforward, multitasking for simultaneously running up to eight programs, and I/O processing for synchronizing motion with external events. Modes of motion include point-to-point positioning, position tracking, jogging, linear and circular interpolation, ...
Practical Phase-Locked Loop Design
... set average VCO frequency (“integral” path). • Resistor provides instantaneous phase correction w/o affecting avg. freq. (“proportional” path). • C2 cap smoothes large IR ripple on Vctl • Typical value: 0.5k < Rlpf < 20kOhm Vctl Res ...
... set average VCO frequency (“integral” path). • Resistor provides instantaneous phase correction w/o affecting avg. freq. (“proportional” path). • C2 cap smoothes large IR ripple on Vctl • Typical value: 0.5k < Rlpf < 20kOhm Vctl Res ...
max-rate-gyro-MAX-12..
... Watson Industries, Inc. warrants, to the original purchaser, this product to be free from defective material or workmanship for a period of two full years from the date of purchase. Watson Industries’ liability under this warranty is limited to repairing or replacing, at Watson Industries’ sole disc ...
... Watson Industries, Inc. warrants, to the original purchaser, this product to be free from defective material or workmanship for a period of two full years from the date of purchase. Watson Industries’ liability under this warranty is limited to repairing or replacing, at Watson Industries’ sole disc ...
Head movement based wireless communication with speech alert
... A relay is an electrically operated switch. Many relays use an electromagnet to mechanically operate a switch, but other operating principles are also used, such as solid-state relays. Relays are used where it is necessary to control a circuit by a low-power signal (with complete electrical isolatio ...
... A relay is an electrically operated switch. Many relays use an electromagnet to mechanically operate a switch, but other operating principles are also used, such as solid-state relays. Relays are used where it is necessary to control a circuit by a low-power signal (with complete electrical isolatio ...
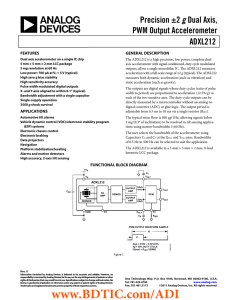
g PWM Output Accelerometer ADXL212
... The ADXL212 is a high precision, low power, complete dual axis accelerometer with signal conditioned, duty cycle modulated outputs, all on a single monolithic IC. The ADXL212 measures acceleration with a full-scale range of ±2 g (typical). The ADXL212 measures both dynamic acceleration (such as vibr ...
... The ADXL212 is a high precision, low power, complete dual axis accelerometer with signal conditioned, duty cycle modulated outputs, all on a single monolithic IC. The ADXL212 measures acceleration with a full-scale range of ±2 g (typical). The ADXL212 measures both dynamic acceleration (such as vibr ...
No Slide Title
... blending position and acceleration signals is delicate matter of digital control design to prevent sensor/seismic noise re-injection (the suspension control “less inetrial”, but with smaller residual RMS for Virgo crossing frequency 30 mHz 70 mHz) ...
... blending position and acceleration signals is delicate matter of digital control design to prevent sensor/seismic noise re-injection (the suspension control “less inetrial”, but with smaller residual RMS for Virgo crossing frequency 30 mHz 70 mHz) ...
Servos
... positioning. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of a servo does not rotate freely. It seeks a particular angular position under electronic control. Servos are typically rated by torque and speed. A servo rated 40 ouncein/.21 means that at 1 inc ...
... positioning. They typically have a movement range of 180 deg but can go up to 210 deg. The output shaft of a servo does not rotate freely. It seeks a particular angular position under electronic control. Servos are typically rated by torque and speed. A servo rated 40 ouncein/.21 means that at 1 inc ...
FMS
... • Given the flight plan and the aircraft's position, the FMS calculates the course to follow. • Autopilot can be set to follow the course. ...
... • Given the flight plan and the aircraft's position, the FMS calculates the course to follow. • Autopilot can be set to follow the course. ...