

Unit 5
... #28—Identifies and evaluates tangent, sine, and cosine ratios for an acute angle of a right triangle; uses a table, calculator, or computer to find the ratio for a given angle or find the angle for a given ratio #29—Uses the tangent, sine, and cosine ratios for right triangles to solve application p ...
... #28—Identifies and evaluates tangent, sine, and cosine ratios for an acute angle of a right triangle; uses a table, calculator, or computer to find the ratio for a given angle or find the angle for a given ratio #29—Uses the tangent, sine, and cosine ratios for right triangles to solve application p ...

3379 Homework 3
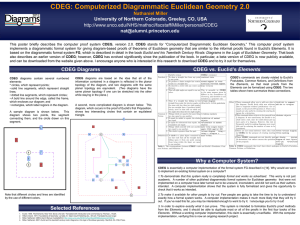
... Given a unit sphere and line AB on the sphere. If point C is between A and B, where is point C. Sketch the situation and discuss the problems with the notion of between. ...
... Given a unit sphere and line AB on the sphere. If point C is between A and B, where is point C. Sketch the situation and discuss the problems with the notion of between. ...

Euclidean Parallel Postulate
... l3, then l1 is parallel to l3. Euclidean Proposition 2.4. If l1, l2, l3 are three distinct lines such that l1 intersects l2 and l2 is parallel to l3, then l1 intersects l3. Euclidean Proposition 2.5. A line perpendicular to one of two parallel lines is perpendicular to the other. Euclidean Propositi ...
... l3, then l1 is parallel to l3. Euclidean Proposition 2.4. If l1, l2, l3 are three distinct lines such that l1 intersects l2 and l2 is parallel to l3, then l1 intersects l3. Euclidean Proposition 2.5. A line perpendicular to one of two parallel lines is perpendicular to the other. Euclidean Propositi ...
... line going through the given point outside it, or that there are more than one such parallels. It is easy to prove that if there are more than one parallel, there are infinitely many, so we don't get different geometries with 2, 3, 4 etc. parallels. The "no parallel" geometry is called elliptic plan ...

Operations and Configurations Roughly speaking, an `operad` is a
... Roughly speaking, an 'operad' is a family of operations, and an 'algebra' for the operad is an something upon which these operations operate. For example, there is an associative operad whose algebras are precisely associative algebras. The most famous examples are the 'little n-discs', whose algebr ...
... Roughly speaking, an 'operad' is a family of operations, and an 'algebra' for the operad is an something upon which these operations operate. For example, there is an associative operad whose algebras are precisely associative algebras. The most famous examples are the 'little n-discs', whose algebr ...

Ph.D. Qualifying examination in topology Charles Frohman and
... Notation: Rn is Euclidean n-space, with the usual topology and di¤erentiable structure. S n is the n-sphere, the set of points distance one from the origin in Rn+1 , with the subspace topology, and with the usual di¤erentiable structure. “Manifold”means compact di¤erentiable manifold without boundar ...
... Notation: Rn is Euclidean n-space, with the usual topology and di¤erentiable structure. S n is the n-sphere, the set of points distance one from the origin in Rn+1 , with the subspace topology, and with the usual di¤erentiable structure. “Manifold”means compact di¤erentiable manifold without boundar ...

Set 8
... (c) Find (with proof) the closure of the rational numbers in R (with the usual Euclidean topology). (d) Show that the closure of S is all of X if and and only if S intersects every non-empty open set of X. (In this case, we say S is dense in X). (e) Find an example of a countable dense subset of R. ...
... (c) Find (with proof) the closure of the rational numbers in R (with the usual Euclidean topology). (d) Show that the closure of S is all of X if and and only if S intersects every non-empty open set of X. (In this case, we say S is dense in X). (e) Find an example of a countable dense subset of R. ...

Geometry Unit 18: Euclidean vs Non-Euclidean Geometry 2009-2010
... understanding of the essential mathematics applicable to the task, but reasoning may not be completely clear, and there may be minor flaws in computation and/or use of procedures as a result of carelessness or non -essential misunderstandings. The flaws do not detract from evidence of satisfactory u ...
... understanding of the essential mathematics applicable to the task, but reasoning may not be completely clear, and there may be minor flaws in computation and/or use of procedures as a result of carelessness or non -essential misunderstandings. The flaws do not detract from evidence of satisfactory u ...

Polyhedral Geometry
... It holds in spherical geometry, hyperbolic geometry, Minkowski plane and di-Sitter space, … Homework: prove the Euclidean space version using trigonometry. It has applications to algebra (cluster algebra), geometry (Teichmuller theory), computational geometry (Delaunay), …. ...
... It holds in spherical geometry, hyperbolic geometry, Minkowski plane and di-Sitter space, … Homework: prove the Euclidean space version using trigonometry. It has applications to algebra (cluster algebra), geometry (Teichmuller theory), computational geometry (Delaunay), …. ...
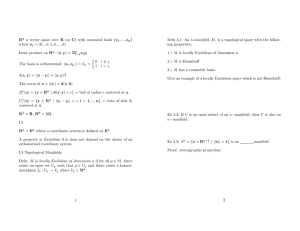
Rn a vector space over R (or C) with canonical basis {e 1, ...,en
... Remark 3.5. For a “smooth” manifold, M ⊂ Rn , can choose a projection by using the fact that for all p ∈ M there exists a unit normal vector Np and tangent plane Tp (M ) which varies continuously with p. Example: smooth and non-smooth curve. Defn: X is regular if one-point sets are closed in X and i ...
... Remark 3.5. For a “smooth” manifold, M ⊂ Rn , can choose a projection by using the fact that for all p ∈ M there exists a unit normal vector Np and tangent plane Tp (M ) which varies continuously with p. Example: smooth and non-smooth curve. Defn: X is regular if one-point sets are closed in X and i ...

Suggested problems
... You can verify this by calculating the side lengths in the Euclidean metric using the Pythagorean theorem/distance formula- the length of 2 marked on the hypotenuse is the Euclidean length, not the Taxicab length. (a) AB ∗ = 2, BC ∗ = |1 − 0| + |0 − ...
... You can verify this by calculating the side lengths in the Euclidean metric using the Pythagorean theorem/distance formula- the length of 2 marked on the hypotenuse is the Euclidean length, not the Taxicab length. (a) AB ∗ = 2, BC ∗ = |1 − 0| + |0 − ...

C:\Documents and Settings\User\My Documents\Classes\362
... neutral geometry, in that they give results “close to” Euclidean results but just not quite as “sharp.” In the Euclidean world, the measure of an exterior angle is not only greater than or equal to the sum of the measures of each its remote interiors, its measure is the sum of their measures. We all ...
... neutral geometry, in that they give results “close to” Euclidean results but just not quite as “sharp.” In the Euclidean world, the measure of an exterior angle is not only greater than or equal to the sum of the measures of each its remote interiors, its measure is the sum of their measures. We all ...

Norms and Metrics, Normed Vector Spaces and
... Definition: Let V be a vector space. A function || · || : V → R+ is a norm on V if it satisfies (N1) - (N4). A vector space together with a norm is called a normed vector space. Definition: Let X be a set. A metric on X is a function d : X × X → R+ that satisfies (D1) (D4). The pair (X, d) is called ...
... Definition: Let V be a vector space. A function || · || : V → R+ is a norm on V if it satisfies (N1) - (N4). A vector space together with a norm is called a normed vector space. Definition: Let X be a set. A metric on X is a function d : X × X → R+ that satisfies (D1) (D4). The pair (X, d) is called ...


x = niabcfghpqr, y = nigh(af)2p*, z = mca(bg)2qs, w = tnbf{ch)2rz
... T H E O R E M . Four points of a metric space are congruent to four points of a euclidean space if and only if any three angles having a common vertex satisfy the triangle axiom with a sum not exceeding ...
... T H E O R E M . Four points of a metric space are congruent to four points of a euclidean space if and only if any three angles having a common vertex satisfy the triangle axiom with a sum not exceeding ...

as a Word .doc
... a) Construct a table that shows all the potential betweenness relations between any 3 points (see below where I’ve gotten it started, and note that if you have an ordering such as A B C , you don’t also need C B A , because that’s really the same thing). b) Then, for each, state whether XY ...
... a) Construct a table that shows all the potential betweenness relations between any 3 points (see below where I’ve gotten it started, and note that if you have an ordering such as A B C , you don’t also need C B A , because that’s really the same thing). b) Then, for each, state whether XY ...

The PDF of our notes about Kant and Euclidean Geometry
... The apodeicDc certainty of all geometrical proposiDons, and the possibility of their a priori construcDon, is grounded in this a priori necessity of space. Were this representaDon of space a concept a ...
... The apodeicDc certainty of all geometrical proposiDons, and the possibility of their a priori construcDon, is grounded in this a priori necessity of space. Were this representaDon of space a concept a ...

Statistical and Dynamical Modeling of Riemannian Trajectories with
... sensors that measure different physical phenomenon -- such as gyroscopes that measure orientation in phones, the Microsoft Kinect measures depth information, etc. A typical application requires inferring the underlying physical phenomenon from data, which is done using machine learning. A fundamenta ...
... sensors that measure different physical phenomenon -- such as gyroscopes that measure orientation in phones, the Microsoft Kinect measures depth information, etc. A typical application requires inferring the underlying physical phenomenon from data, which is done using machine learning. A fundamenta ...

Supplementary Notes on Elementary Topology
... extends to infinity in both directions. Elements/points in this space/set are the usual real numbers, x ∈ R. Recall the definition of Cartesian product: If A and B are sets, then A × B = {(a, b) | a ∈ A, b ∈ B}. The 2-dimensional Euclidean space is the Cartesian product of two copies of R. It is thu ...
... extends to infinity in both directions. Elements/points in this space/set are the usual real numbers, x ∈ R. Recall the definition of Cartesian product: If A and B are sets, then A × B = {(a, b) | a ∈ A, b ∈ B}. The 2-dimensional Euclidean space is the Cartesian product of two copies of R. It is thu ...

Euclidean space

In geometry, Euclidean space encompasses the two-dimensional Euclidean plane, the three-dimensional space of Euclidean geometry, and certain other spaces. It is named after the Ancient Greek mathematician Euclid of Alexandria. The term ""Euclidean"" distinguishes these spaces from other types of spaces considered in modern geometry. Euclidean spaces also generalize to higher dimensions.Classical Greek geometry defined the Euclidean plane and Euclidean three-dimensional space using certain postulates, while the other properties of these spaces were deduced as theorems. Geometric constructions are also used to define rational numbers. When algebra and mathematical analysis became developed enough, this relation reversed and now it is more common to define Euclidean space using Cartesian coordinates and the ideas of analytic geometry. It means that points of the space are specified with collections of real numbers, and geometric shapes are defined as equations and inequalities. This approach brings the tools of algebra and calculus to bear on questions of geometry and has the advantage that it generalizes easily to Euclidean spaces of more than three dimensions.From the modern viewpoint, there is essentially only one Euclidean space of each dimension. With Cartesian coordinates it is modelled by the real coordinate space (Rn) of the same dimension. In one dimension, this is the real line; in two dimensions, it is the Cartesian plane; and in higher dimensions it is a coordinate space with three or more real number coordinates. Mathematicians denote the n-dimensional Euclidean space by En if they wish to emphasize its Euclidean nature, but Rn is used as well since the latter is assumed to have the standard Euclidean structure, and these two structures are not always distinguished. Euclidean spaces have finite dimension.