
Toward a General Logicist Methodology for Engineering Ethically
... information using informal and/or formal logic. This can be verified by picking up any bioethics textbook (e.g., see Kuhse & Singer 2001). Ethicists never search for ways of reducing ethical concepts, theories, principles to sub-symbolic form, say in some numerical format. They may do this in part, ...
... information using informal and/or formal logic. This can be verified by picking up any bioethics textbook (e.g., see Kuhse & Singer 2001). Ethicists never search for ways of reducing ethical concepts, theories, principles to sub-symbolic form, say in some numerical format. They may do this in part, ...

Application of Qualitative Reasoning to Robotic Soccer
... that are caused by exogenous events like changes in illumination and sporadic misinterpretation of features. An alternative approach to modeling uncertain data is the use of probabilistic methods. However, this causes the disadvantage of having to deal with probabilities in the reasoning process. Fi ...
... that are caused by exogenous events like changes in illumination and sporadic misinterpretation of features. An alternative approach to modeling uncertain data is the use of probabilistic methods. However, this causes the disadvantage of having to deal with probabilities in the reasoning process. Fi ...

cs.cmu.edu - Stanford Artificial Intelligence Laboratory
... robot with multiple actuators and plans in joint state and action space. This is not necessarily an efficient use of resources: the planner must run either on a central machine or simultaneously on each robot, with all sensor information from each robot being sent in real time to every other copy of ...
... robot with multiple actuators and plans in joint state and action space. This is not necessarily an efficient use of resources: the planner must run either on a central machine or simultaneously on each robot, with all sensor information from each robot being sent in real time to every other copy of ...
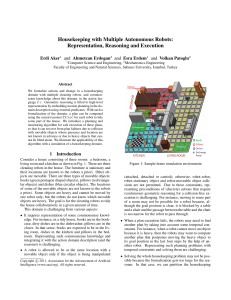
Housekeeping with Multiple Autonomous Robots: Representation
... room of the house). However, then the robots must communicate with each other to tidy the house collaboratively. For instance, if a robot cannot move a heavy object to its goal position, the robot may ask another robot for help. If the robot that cleans kitchen finds a book on the floor, then the ro ...
... room of the house). However, then the robots must communicate with each other to tidy the house collaboratively. For instance, if a robot cannot move a heavy object to its goal position, the robot may ask another robot for help. If the robot that cleans kitchen finds a book on the floor, then the ro ...
Computer-Aided Design and Manufacture
... National and International competition in manufacturing is causing industrial leaders to look at new strategies for remaining competitive and improving quality in their products. Developments in the computer industry are having profound impact on the manufacturing industries from design to machine p ...
... National and International competition in manufacturing is causing industrial leaders to look at new strategies for remaining competitive and improving quality in their products. Developments in the computer industry are having profound impact on the manufacturing industries from design to machine p ...

Planning for Agents with Changing Goals
... Skolemization. More specifically, we generate runtime objects from the sensed variable S that explicitly represent the potential existence of an object to be sensed. These objects are marked as system generated runtime objects. Given an OWQG Q = hF, S, P, C, Gi, one can look at S as a Skolem functi ...
... Skolemization. More specifically, we generate runtime objects from the sensed variable S that explicitly represent the potential existence of an object to be sensed. These objects are marked as system generated runtime objects. Given an OWQG Q = hF, S, P, C, Gi, one can look at S as a Skolem functi ...

I Agents, Bodies, Constraints, Dynamics, and Evolution Alan K. Mackworth
... a story that does not, I hope, tell any lies by omission or commission. It is idiosyncratic, that being the nature of narrative, to make it fit what I want to say as I make sense of that big picture. I hardly need add that this is a highly personal and telegraphic view of the topics I discuss. In a ...
... a story that does not, I hope, tell any lies by omission or commission. It is idiosyncratic, that being the nature of narrative, to make it fit what I want to say as I make sense of that big picture. I hardly need add that this is a highly personal and telegraphic view of the topics I discuss. In a ...

The Frankenstein Complex and Asimov`s Three Laws
... being taken seriously by robotics researchers of his day and that they would be present in any advanced robots as a matter of course (Asimov 1978; Asimov 1990). In preparation for this writing, a handful of emails were sent out asking current robotics and artificial intelligence researchers what the ...
... being taken seriously by robotics researchers of his day and that they would be present in any advanced robots as a matter of course (Asimov 1978; Asimov 1990). In preparation for this writing, a handful of emails were sent out asking current robotics and artificial intelligence researchers what the ...
Fortnightly Thoughts
... data; and given that the true value in genomics lies in the ability to digest and understand this information to translate it into more personalised and accurate treatment, this is another area where AI can play a huge role. Education, energy-consumption, logistics and manufacturing are all becoming ...
... data; and given that the true value in genomics lies in the ability to digest and understand this information to translate it into more personalised and accurate treatment, this is another area where AI can play a huge role. Education, energy-consumption, logistics and manufacturing are all becoming ...
Communications of the ACM
... of a physical robot. Rather, the user provides as input a metric for measuring robot performance along with a simulation of the robot’s task environment, and the algorithm produces as output the body plan and control policy for a robot capable of performing the task. This can then be used to manufac ...
... of a physical robot. Rather, the user provides as input a metric for measuring robot performance along with a simulation of the robot’s task environment, and the algorithm produces as output the body plan and control policy for a robot capable of performing the task. This can then be used to manufac ...
Ten Years of the AAAI Mobile Robot Competition and Exhibition
... provided a target for research in AI and robotics; in Pete Bonasso’s words, the event was cast “in the spirit of trying to develop as animate, responsive, and intelligent robot behavior as possible” (Dean and Bonasso 1993). Second, the contest provided a venue where people could demonstrate their wo ...
... provided a target for research in AI and robotics; in Pete Bonasso’s words, the event was cast “in the spirit of trying to develop as animate, responsive, and intelligent robot behavior as possible” (Dean and Bonasso 1993). Second, the contest provided a venue where people could demonstrate their wo ...

events:knowledge-workshop-iros2011:tikanmaki.pdf (340.2 KB)
... of vision and sonar sensors output. This work has been expanded further through many experiments to the form of the marker described in this paper. As the representation has always been part of the robot’s software, algorithms, planning, similar technologies with a different name exists quite a few. ...
... of vision and sonar sensors output. This work has been expanded further through many experiments to the form of the marker described in this paper. As the representation has always been part of the robot’s software, algorithms, planning, similar technologies with a different name exists quite a few. ...
Metrics and benchmarks in human-robot interaction: Recent
... of several disciplines. Thus, one very interesting question is which disciplines our participants identify with primarily. Here, we find some variation in granularity, which shows that one is dealing with an interdisciplinary community identified with fields such as computer science, cognitive science ...
... of several disciplines. Thus, one very interesting question is which disciplines our participants identify with primarily. Here, we find some variation in granularity, which shows that one is dealing with an interdisciplinary community identified with fields such as computer science, cognitive science ...

Ontology of Actions
... the endpoint of one event may be the starting-point of another one, but two events may not have more than one point (an endpoint) in common. For example, one event recognizer may identify periods of time during which a helicopter first starts its engine, then takes off, flies, lands at another point ...
... the endpoint of one event may be the starting-point of another one, but two events may not have more than one point (an endpoint) in common. For example, one event recognizer may identify periods of time during which a helicopter first starts its engine, then takes off, flies, lands at another point ...
The Institutional Repository of University of Tampere Post
... (CBCD) model for a Chinese software company (Huazisoft) to involve online community members into the implementation and testing phases of several commercial projects. Although they run a selection procedure for candidates, the community team was simply hired in their free time for lower wages simil ...
... (CBCD) model for a Chinese software company (Huazisoft) to involve online community members into the implementation and testing phases of several commercial projects. Although they run a selection procedure for candidates, the community team was simply hired in their free time for lower wages simil ...

Knowledge Processing for Cognitive Robots
... knowledge, ideally both skills and models another robot has already learned, and information that was originally intended to be used by humans. Our approach: Import Knowledge from the WWW In our ongoing research, we are investigating how information from the Internet can be used to improve the robot ...
... knowledge, ideally both skills and models another robot has already learned, and information that was originally intended to be used by humans. Our approach: Import Knowledge from the WWW In our ongoing research, we are investigating how information from the Internet can be used to improve the robot ...
MIT Mobile Robots - What`s Next? - DSpace@MIT
... by step, from technology that can be produced now to the end goal of what should be developed. Having a clear picture of that goal clarifies what problems should be addressed and' in what order. There are two major guiding considerations here. To create a gnat robot we need to minimize power consump ...
... by step, from technology that can be produced now to the end goal of what should be developed. Having a clear picture of that goal clarifies what problems should be addressed and' in what order. There are two major guiding considerations here. To create a gnat robot we need to minimize power consump ...

Robots as moral agents, in Machine Medical Ethics , eds. Mattijs
... which brought along a number of new ethical problems, some of which had never been encountered before. Shall we switch to artificial means of reproduction? Is it acceptable to deliberately make human embryos for research or therapeutic purposes? Is it worthwhile to enhance humans and animals by mean ...
... which brought along a number of new ethical problems, some of which had never been encountered before. Shall we switch to artificial means of reproduction? Is it acceptable to deliberately make human embryos for research or therapeutic purposes? Is it worthwhile to enhance humans and animals by mean ...

Investment research faces technological disruption
... analyzed, while nearly one-fourth of the digital data could be useful if tagged and analyzed. Decision makers know that unstructured data contains a repository of high-value historical and contextual business data. Despite its importance, unstructured data has been untapped across firms due to the d ...
... analyzed, while nearly one-fourth of the digital data could be useful if tagged and analyzed. Decision makers know that unstructured data contains a repository of high-value historical and contextual business data. Despite its importance, unstructured data has been untapped across firms due to the d ...

An Emotional Mimicking Humanoid Biped Robot and its Quantum
... [oo]. OpenCV software from Intel [17] is used for image acquisition and robot vision algorithms. In this paper we would like to share our experiences on the development of the biped robot current status and future projects. A popular approach to solve many motion planning and knowledge-based behavio ...
... [oo]. OpenCV software from Intel [17] is used for image acquisition and robot vision algorithms. In this paper we would like to share our experiences on the development of the biped robot current status and future projects. A popular approach to solve many motion planning and knowledge-based behavio ...

Subdimensional Expansion and Optimal Task Reassignment
... Multirobot path planning and task assignment are traditionally treated separately, however task assignment can greatly impact the difficulty of the path planning problem, and the ultimate quality of solution is dependent upon both. We introduce task reassignment, an approach to optimally solving the ...
... Multirobot path planning and task assignment are traditionally treated separately, however task assignment can greatly impact the difficulty of the path planning problem, and the ultimate quality of solution is dependent upon both. We introduce task reassignment, an approach to optimally solving the ...

Title Social robotics - Research Repository UCD
... the deliberative system school. The former has predominated in the arena of autonomous mobile robot control. In this paper we synthesis reactive and deliberative reasoning. In the delivery of computationally tractable models of deliberative reasoning, one approach that has gained wide acceptance is ...
... the deliberative system school. The former has predominated in the arena of autonomous mobile robot control. In this paper we synthesis reactive and deliberative reasoning. In the delivery of computationally tractable models of deliberative reasoning, one approach that has gained wide acceptance is ...
algorithms and aristotle
... so it has access to a vast library of information on the Internet, where there’s information on almost every object imaginable. It is an enormous amount of information, and it is constantly growing. The second advance of Cloud Robotics is Cloud Computing. The Cloud not only holds vast amounts of inf ...
... so it has access to a vast library of information on the Internet, where there’s information on almost every object imaginable. It is an enormous amount of information, and it is constantly growing. The second advance of Cloud Robotics is Cloud Computing. The Cloud not only holds vast amounts of inf ...
Robots and DSP methods: History and perspectives
... 1920 by his brother writer Karel Capek. This fantastically-visionary work takes place on an island somewhere in the middle of the ocean. On island is the central factory of Rossum’s universal robots. These Robots are being sold to the world as cheap labour force. At the end of the play the only surv ...
... 1920 by his brother writer Karel Capek. This fantastically-visionary work takes place on an island somewhere in the middle of the ocean. On island is the central factory of Rossum’s universal robots. These Robots are being sold to the world as cheap labour force. At the end of the play the only surv ...
Human Implications of Human-Robot Interaction AAAI Press Papers from the AAAI Workshop
... AAAI maintains compilation copyright for this technical report and retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the pap ...
... AAAI maintains compilation copyright for this technical report and retains the right of first refusal to any publication (including electronic distribution) arising from this AAAI event. Please do not make any inquiries or arrangements for hardcopy or electronic publication of all or part of the pap ...