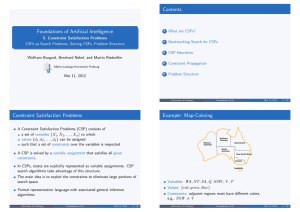
5. Constraint Satisfaction Problems CSPs as Search Problems
... Pick any variable as root; choose an ordering such that each variable appears after its parent in the tree. Apply arc-consistency to (Xi , Xk ), when Xi is the parent of Xk , for all k = n down to 2. (any tree with n nodes has n − 1 arcs, per arc d2 comparisons are needed: O(n d2 )) ...
... Pick any variable as root; choose an ordering such that each variable appears after its parent in the tree. Apply arc-consistency to (Xi , Xk ), when Xi is the parent of Xk , for all k = n down to 2. (any tree with n nodes has n − 1 arcs, per arc d2 comparisons are needed: O(n d2 )) ...

Solving a Dynamic Adverse Selection Model Through Finite Policy
... plementing an APS recursion is proposed by Judd, Yeltekin, and Conklin (2003). They bound the equilibrium payoff set by convex polytopes from inside and outside and provide algorithms that generate inner and outer polytopes to approximate the equilibrium payoff set. This approach is adopted by Slee ...
... plementing an APS recursion is proposed by Judd, Yeltekin, and Conklin (2003). They bound the equilibrium payoff set by convex polytopes from inside and outside and provide algorithms that generate inner and outer polytopes to approximate the equilibrium payoff set. This approach is adopted by Slee ...



IT7005B-Artificial Intelligence UNIT WISE Important Questions
... 9. Define the terms false negative and false positive for the hypothesis. 10. What is meant by memorization? 11. What is meant by functional dependencies or determinations? 12. Define Baye‘s rule. 13. What is meant by Artificial Neural Network (ANN)? 14. What is need of activation functions in neura ...
... 9. Define the terms false negative and false positive for the hypothesis. 10. What is meant by memorization? 11. What is meant by functional dependencies or determinations? 12. Define Baye‘s rule. 13. What is meant by Artificial Neural Network (ANN)? 14. What is need of activation functions in neura ...

Incomplete Information - Einstein Institute of Mathematics @ The
... for each player, a probability distribution on the states of nature. The second level specifies, for each player, a joint probability distribution on the states of nature and the others’ probability distributions. The third level specifies, for each player, a joint probability distribution on the st ...
... for each player, a probability distribution on the states of nature. The second level specifies, for each player, a joint probability distribution on the states of nature and the others’ probability distributions. The third level specifies, for each player, a joint probability distribution on the st ...

05_Artificial_Intelligence-SearchMethods
... If cycles are presented in the graph, DFS will follow these cycles indefinitively If there are no cycles, the algorithm is complete Cycles effects can be limited by imposing a maximal depth of search (still the algorithm is ...
... If cycles are presented in the graph, DFS will follow these cycles indefinitively If there are no cycles, the algorithm is complete Cycles effects can be limited by imposing a maximal depth of search (still the algorithm is ...


Artificial Intelligence 2.2 Heuristic (Informed) Search
... a) Formalize the vacuum world with a variable number of rooms, one cleaning agent, the actions left, right, up, down, suck (each with costs 1) that are always executable in any state. A room can be clean or dirty, with some random dirt distribution that is known to the agent. The goal is to have all ...
... a) Formalize the vacuum world with a variable number of rooms, one cleaning agent, the actions left, right, up, down, suck (each with costs 1) that are always executable in any state. A room can be clean or dirty, with some random dirt distribution that is known to the agent. The goal is to have all ...

Techniques to solve AI problems
... The OPEN list of the Astar is implemented using a priority queue. A priority queue is more suitable because we need to pick the State with least F in order to proceed downwards. Other possible data structures that can be used are heaps. The OPEN list stores the states that were generated but not exp ...
... The OPEN list of the Astar is implemented using a priority queue. A priority queue is more suitable because we need to pick the State with least F in order to proceed downwards. Other possible data structures that can be used are heaps. The OPEN list stores the states that were generated but not exp ...

Artificial Intelligence UNIT I Page 1 of 116 CSE– Dhaanish Ahmed
... track of human mind regardless of right answers. The problem solver is contrast to other researchers, because they are concentrating on getting the right answers regardless of the human mind. An Interdisciplinary field of cognitive science uses computer models from AI and experimental techniques fro ...
... track of human mind regardless of right answers. The problem solver is contrast to other researchers, because they are concentrating on getting the right answers regardless of the human mind. An Interdisciplinary field of cognitive science uses computer models from AI and experimental techniques fro ...
Planning and acting in partially observable stochastic domains
... is made on each step with probability 1 − γ . The larger the discount factor (closer to 1), the more effect future rewards have on current decision making. In our forthcoming discussions of finite-horizon optimality, we will also use a discount factor; when it has value one, it is equivalent to the ...
... is made on each step with probability 1 − γ . The larger the discount factor (closer to 1), the more effect future rewards have on current decision making. In our forthcoming discussions of finite-horizon optimality, we will also use a discount factor; when it has value one, it is equivalent to the ...

The YAHSP planning system: Forward heuristic search with
... Principle and use of lookahead plans In classical forward state-space search algorithms, a node in the search graph represents a planning state and an arc starting from that node represents the application of one action to this state, that leads to a new state. In order to ensure completeness, all a ...
... Principle and use of lookahead plans In classical forward state-space search algorithms, a node in the search graph represents a planning state and an arc starting from that node represents the application of one action to this state, that leads to a new state. In order to ensure completeness, all a ...



Probably Approximately Correct Heuristic Search
... Search (Thayer and Ruml 2008) are known examples of w-admissible algorithms. In general, w-admissible search algorithms achieve w-admissibility by using an admissible heuristic to obtain a lower bound on the optimal solution. When the ratio between the incumbent solution (i.e., the best solution fou ...
... Search (Thayer and Ruml 2008) are known examples of w-admissible algorithms. In general, w-admissible search algorithms achieve w-admissibility by using an admissible heuristic to obtain a lower bound on the optimal solution. When the ratio between the incumbent solution (i.e., the best solution fou ...



Point-Based Policy Generation for Decentralized POMDPs
... Figure 2: Example of the policy-tree construction process for two agents with two observations: (1) shows the input, which includes a belief state b, a joint action ha1 , a2 i, and sets of depth-t policy trees represented by the triangles; (2) shows the best mappings for the given belief state and j ...
... Figure 2: Example of the policy-tree construction process for two agents with two observations: (1) shows the input, which includes a belief state b, a joint action ha1 , a2 i, and sets of depth-t policy trees represented by the triangles; (2) shows the best mappings for the given belief state and j ...

Factored Planning Using Decomposition Trees
... their capabilities private. V actions are much more informative, which should help avoid infeasible holes, but which also brings us closer to central planning. ...
... their capabilities private. V actions are much more informative, which should help avoid infeasible holes, but which also brings us closer to central planning. ...
Introduction to Artificial Intelligence State Space Search
... – One starting from the initial state and searching forward – One starting from the goal state and searching backward The search terminates when the two graphs intersect Introduction to Artificial Intelligence ...
... – One starting from the initial state and searching forward – One starting from the goal state and searching backward The search terminates when the two graphs intersect Introduction to Artificial Intelligence ...
