

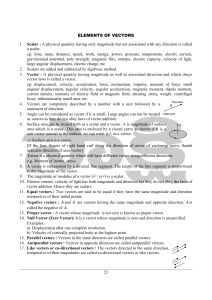
23 ELEMENTS OF VECTORS 1. Scalar : A physical quantity having
... Scalars are added and subtracted by algebraic method. Vector : A physical quantity having magnitude as well as associated direction and which obeys vector laws is called a vector. eg: displacement, velocity, acceleration, force, momentum, impulse, moment of force, small angular displacement, angular ...
... Scalars are added and subtracted by algebraic method. Vector : A physical quantity having magnitude as well as associated direction and which obeys vector laws is called a vector. eg: displacement, velocity, acceleration, force, momentum, impulse, moment of force, small angular displacement, angular ...


Math 133, Chapter 11 Practice 1. The cranes in the following figure
... the southwest at 100 kilometers per hour. What is the true direction of the plane, and what is its speed with respect to the ground? ...
... the southwest at 100 kilometers per hour. What is the true direction of the plane, and what is its speed with respect to the ground? ...











Reformulated as: either all Mx = b are solvable, or Mx = 0 has
... Any vector space over R of dimension n is isomorphic to Rn . Any vector space over C of dimension n is isomorphic to Cn . Indeed, let U be a vector space of dimension n over F (where F is R or C). Let u1 , . . . , un be a basis for U . Define T : U ! F n by T (uj ) = ej for j = 1, . . . n and then e ...
... Any vector space over R of dimension n is isomorphic to Rn . Any vector space over C of dimension n is isomorphic to Cn . Indeed, let U be a vector space of dimension n over F (where F is R or C). Let u1 , . . . , un be a basis for U . Define T : U ! F n by T (uj ) = ej for j = 1, . . . n and then e ...

Sept. 3, 2013 Math 3312 sec 003 Fall 2013
... Let T : Rn −→ Rm be a linear transformation. There exists a unique m × n matrix A such that T (x) = Ax for every x ∈ Rn . Moreover, the j th column of the matrix A is the vector T (ej ), where ej is the j th column of the n × n identity matrix In . That is, A = [T (e1 ) T (e2 ) ...
... Let T : Rn −→ Rm be a linear transformation. There exists a unique m × n matrix A such that T (x) = Ax for every x ∈ Rn . Moreover, the j th column of the matrix A is the vector T (ej ), where ej is the j th column of the n × n identity matrix In . That is, A = [T (e1 ) T (e2 ) ...

Math 311: Topics in Applied Math 1 3: Vector Spaces 3.2
... • Every subpsace S of V is a vector space in its own right, having inherited the requisite stucture from V . Accordingly, every subspace of V must contain the zero vector of V . ...
... • Every subpsace S of V is a vector space in its own right, having inherited the requisite stucture from V . Accordingly, every subspace of V must contain the zero vector of V . ...



Lecture 5 vector bundles, gauge theory tangent bundle In Lecture 2
... where p ∈ M , v ∈ V and g(p) is an invertible linear map on V . This gj←i (p) ∈ GL(V, R) is called a transition function. If there is a triple intersection of three charts Ui , Uj and Uk , the transition function must satisfy the consistency condition, gk←j (p)gj←i (p) = gk←i (p), on p ∈ Ui ∩ Uj ∩ U ...
... where p ∈ M , v ∈ V and g(p) is an invertible linear map on V . This gj←i (p) ∈ GL(V, R) is called a transition function. If there is a triple intersection of three charts Ui , Uj and Uk , the transition function must satisfy the consistency condition, gk←j (p)gj←i (p) = gk←i (p), on p ∈ Ui ∩ Uj ∩ U ...


Class notes
... When you want to show that a subset U of a vector space V is non-empty, it is often easiest to show that U contains the additive identity of V. In fact, we could replace the first condition of the above theorem with 0 P U, where 0 is the additive identity of V. Let’s use the above theorem to show th ...
... When you want to show that a subset U of a vector space V is non-empty, it is often easiest to show that U contains the additive identity of V. In fact, we could replace the first condition of the above theorem with 0 P U, where 0 is the additive identity of V. Let’s use the above theorem to show th ...