NIU Physics PhD Candidacy Exam – Spring 2017 – Classical
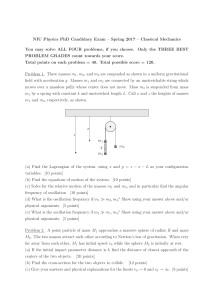
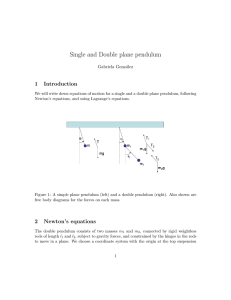
... (a) Find the position and velocity of the point P as a function of time. (4 points) (b) Find the Lagrangian for the system in terms of the configuration variable φ, which is the angle made by the pendulum with the vertical. Simplify the result so that each term has at most one trigonometric function ...
... (a) Find the position and velocity of the point P as a function of time. (4 points) (b) Find the Lagrangian for the system in terms of the configuration variable φ, which is the angle made by the pendulum with the vertical. Simplify the result so that each term has at most one trigonometric function ...








problems on mechanics 1 introduction 2 first laws — theoretical basis
... (torques and angular momenta) are parallel to the z-axis, i.e. for finding such effective application centres, e.g. in the case ⃗ = ⃗r × p⃗ and T⃗ = ⃗r × F⃗ as scalars, charwe can consider L of an homogeneous gravity field, it appears to be the centre of acterized by their projection to the z-axis (i ...
... (torques and angular momenta) are parallel to the z-axis, i.e. for finding such effective application centres, e.g. in the case ⃗ = ⃗r × p⃗ and T⃗ = ⃗r × F⃗ as scalars, charwe can consider L of an homogeneous gravity field, it appears to be the centre of acterized by their projection to the z-axis (i ...

Engineering Mechanics
... investigations. The prediction of a future state of a system is the main goal, which has to be achieved. Due to the hypothetical nature of this approach, it is irrelevant whether the assumed state will be achieved or not: Safety requirements often demand for assumptions that are equivalent to a cata ...
... investigations. The prediction of a future state of a system is the main goal, which has to be achieved. Due to the hypothetical nature of this approach, it is irrelevant whether the assumed state will be achieved or not: Safety requirements often demand for assumptions that are equivalent to a cata ...