
AN5326, Using the Programmable Gain Amplifier in the S12ZVLA
... Figure 4. Application circuit with a Wheatstone bridge sensor In cases where noise is relatively high, it's usually add LPB filter the output of a bridge sensor. This reduces wide band noise and can help to reject EMI/RFI. In the figure X, it is shown is a single-pole differential low-pass filter co ...
... Figure 4. Application circuit with a Wheatstone bridge sensor In cases where noise is relatively high, it's usually add LPB filter the output of a bridge sensor. This reduces wide band noise and can help to reject EMI/RFI. In the figure X, it is shown is a single-pole differential low-pass filter co ...
Selecting an A/D Converter (Rev. A)
... Each code transition should occur at an interval equal to 1 LSB. For example, with a 3-bit A/D, if the first transition occurs at 1/8 of full scale (0.125 FSR), the second transition will ideally occur at 0.250 FSR. The deviation from that ideal transition is the differential linearity error for tha ...
... Each code transition should occur at an interval equal to 1 LSB. For example, with a 3-bit A/D, if the first transition occurs at 1/8 of full scale (0.125 FSR), the second transition will ideally occur at 0.250 FSR. The deviation from that ideal transition is the differential linearity error for tha ...

DM74ALS04BM - hep.physics.lsa.umich.edu
... High to Low Level Output Note 2: See Section 1 for test waveforms and output load. ...
... High to Low Level Output Note 2: See Section 1 for test waveforms and output load. ...



to print line coding..
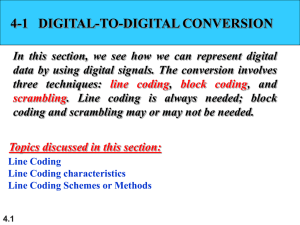
... 4-1 DIGITAL-TO-DIGITAL CONVERSION In this section, we see how we can represent digital data by using digital signals. The conversion involves three techniques: line coding, block coding, and scrambling. Line coding is always needed; block coding and scrambling may or may not be needed. Topics discus ...
... 4-1 DIGITAL-TO-DIGITAL CONVERSION In this section, we see how we can represent digital data by using digital signals. The conversion involves three techniques: line coding, block coding, and scrambling. Line coding is always needed; block coding and scrambling may or may not be needed. Topics discus ...


ECE 4951
... – Let i(t) = Ki*∫e(t)dt {i integral of e (area)} – Let d(t) = Kd* de(t)/dt {d derivative of e (slope)} ...
... – Let i(t) = Ki*∫e(t)dt {i integral of e (area)} – Let d(t) = Kd* de(t)/dt {d derivative of e (slope)} ...

Chapter 19 Analog Input/Output Expansion Board
... 19.3 Address Allocation of FBs Analog Expansion Boards The address allocation of analog expansion board also has difference to FBs series analog expansion module. The occupied analog expansion board system resources is no longer numerical input register (IR register) R3840~R3903 or numerical output ...
... 19.3 Address Allocation of FBs Analog Expansion Boards The address allocation of analog expansion board also has difference to FBs series analog expansion module. The occupied analog expansion board system resources is no longer numerical input register (IR register) R3840~R3903 or numerical output ...


Evaluates: MAX5854/MAX5853 MAX5854 Evaluation Kit General Description Features
... differential clock input signal. However, the EV kit board only requires one external single-ended clock signal to evaluate the two clock modes. The EV kit circuit provides connectors that connect a single-ended signal directly to the DAC and circuitry that converts a single-ended clock signal to a ...
... differential clock input signal. However, the EV kit board only requires one external single-ended clock signal to evaluate the two clock modes. The EV kit circuit provides connectors that connect a single-ended signal directly to the DAC and circuitry that converts a single-ended clock signal to a ...

CSMIO-MPG® v1
... Pay special attention to the emergency stop circuit. The control system must be designed in such a way that when you press the emergency stop mushroom, the controlled machine immediately stops all axes. You should also take into account the possible failure of any system components such as the main ...
... Pay special attention to the emergency stop circuit. The control system must be designed in such a way that when you press the emergency stop mushroom, the controlled machine immediately stops all axes. You should also take into account the possible failure of any system components such as the main ...





Loop Bandwidth and Clock Data Recovery (CDR) in
... Ideally, the input signal to a PLL is a perfect sine wave and the output will pull in and match that output perfectly. However, in any real word signal there is going to be noise in frequency, amplitude, and phase. The PLL has to be able to maintain a lock in the presence of noise but it must not be ...
... Ideally, the input signal to a PLL is a perfect sine wave and the output will pull in and match that output perfectly. However, in any real word signal there is going to be noise in frequency, amplitude, and phase. The PLL has to be able to maintain a lock in the presence of noise but it must not be ...

(b) (c) (d)
... 53.A 400 V/100 V, 10 kVA two-winding transformer is reconnected as an autotransformer across a suitable voltage source. The maximum rating of such an arrangement could be (a) 50 kVA (b) 15 kVA (c) 12.5 kVA (d) 8.75 kVA 54.A 4-pole DC generator is running at 1500 rpm. The frequency of current in the ...
... 53.A 400 V/100 V, 10 kVA two-winding transformer is reconnected as an autotransformer across a suitable voltage source. The maximum rating of such an arrangement could be (a) 50 kVA (b) 15 kVA (c) 12.5 kVA (d) 8.75 kVA 54.A 4-pole DC generator is running at 1500 rpm. The frequency of current in the ...



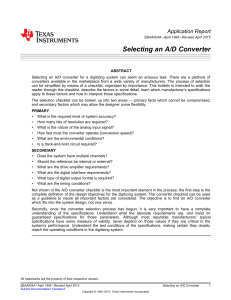
Analog-to-digital converter

An analog-to-digital converter (ADC, A/D, or A to D) is a device that converts a continuous physical quantity (usually voltage) to a digital number that represents the quantity's amplitude.The conversion involves quantization of the input, so it necessarily introduces a small amount of error. Furthermore, instead of continuously performing the conversion, an ADC does the conversion periodically, sampling the input. The result is a sequence of digital values that have been converted from a continuous-time and continuous-amplitude analog signal to a discrete-time and discrete-amplitude digital signal.An ADC is defined by its bandwidth (the range of frequencies it can measure) and its signal to noise ratio (how accurately it can measure a signal relative to the noise it introduces). The actual bandwidth of an ADC is characterized primarily by its sampling rate, and to a lesser extent by how it handles errors such as aliasing. The dynamic range of an ADC is influenced by many factors, including the resolution (the number of output levels it can quantize a signal to), linearity and accuracy (how well the quantization levels match the true analog signal) and jitter (small timing errors that introduce additional noise). The dynamic range of an ADC is often summarized in terms of its effective number of bits (ENOB), the number of bits of each measure it returns that are on average not noise. An ideal ADC has an ENOB equal to its resolution. ADCs are chosen to match the bandwidth and required signal to noise ratio of the signal to be quantized. If an ADC operates at a sampling rate greater than twice the bandwidth of the signal, then perfect reconstruction is possible given an ideal ADC and neglecting quantization error. The presence of quantization error limits the dynamic range of even an ideal ADC, however, if the dynamic range of the ADC exceeds that of the input signal, its effects may be neglected resulting in an essentially perfect digital representation of the input signal.An ADC may also provide an isolated measurement such as an electronic device that converts an input analog voltage or current to a digital number proportional to the magnitude of the voltage or current. However, some non-electronic or only partially electronic devices, such as rotary encoders, can also be considered ADCs. The digital output may use different coding schemes. Typically the digital output will be a two's complement binary number that is proportional to the input, but there are other possibilities. An encoder, for example, might output a Gray code.The inverse operation is performed by a digital-to-analog converter (DAC).