
Lecture No. 41 - Taleem-E
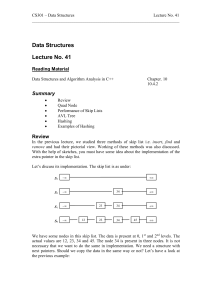
... Let’s analyze this data structure and see how much time is required for search and deletion process. The analysis is probability-based and needs lot of time. We will do this in some other course. Let’s discuss about the performance of the skip list regarding insert, find and remove methods. In a ski ...
... Let’s analyze this data structure and see how much time is required for search and deletion process. The analysis is probability-based and needs lot of time. We will do this in some other course. Let’s discuss about the performance of the skip list regarding insert, find and remove methods. In a ski ...

DataRover: A Taxonomy Based Crawler for
... two sample product pages and gives them to the Segmentation Component, which segments these two pages as explained in Section 4.3.1. Next, Segment Aligner takes this sequence of segments and aligns them as explained in Section 4.3.2. All the data from the aligned dissimilar segments are considered a ...
... two sample product pages and gives them to the Segmentation Component, which segments these two pages as explained in Section 4.3.1. Next, Segment Aligner takes this sequence of segments and aligns them as explained in Section 4.3.2. All the data from the aligned dissimilar segments are considered a ...



2IL05 Data Structures
... Invariant If tree T contains an interval that overlaps j, then there is such an interval in the subtree rooted at x. ...
... Invariant If tree T contains an interval that overlaps j, then there is such an interval in the subtree rooted at x. ...



Compressed Suffix Trees with Full Functionality
... node to the node, including itself and excluding the root node. Suffix links are defined for all internal nodes, except the root node, of a suffix tree as follows. Definition 1 The suffix link sl(v) of an internal node v with path-label xα, where x denotes a single character and α denotes a possibly empty s ...
... node to the node, including itself and excluding the root node. Suffix links are defined for all internal nodes, except the root node, of a suffix tree as follows. Definition 1 The suffix link sl(v) of an internal node v with path-label xα, where x denotes a single character and α denotes a possibly empty s ...

Linear Lists
... Insert at Beginning •A new node is added before the first node of the list. •Determine that addition is at the beginning of the list. If the predecessor pointer is a null pointer, there is no predecessor, so we are at the beginning of the list. •Point the new node to the first node of the list and ...
... Insert at Beginning •A new node is added before the first node of the list. •Determine that addition is at the beginning of the list. If the predecessor pointer is a null pointer, there is no predecessor, so we are at the beginning of the list. •Point the new node to the first node of the list and ...

Minimum Spanning Tree: Directed Graphs
... Algorithm 1. Initially, every vertex is considered a tree. 2. For each tree, keep 1 incoming edge with the minimum weight. 3. If there is no cycle, go to #5. 4. If there is a cycle, merge trees with the cycle into one and update scores for all incoming edges to this tree, and goto #2. • For each ver ...
... Algorithm 1. Initially, every vertex is considered a tree. 2. For each tree, keep 1 incoming edge with the minimum weight. 3. If there is no cycle, go to #5. 4. If there is a cycle, merge trees with the cycle into one and update scores for all incoming edges to this tree, and goto #2. • For each ver ...






time-databases
... Each internal node entry contains a minimum bounding interval (MBI) and a child pointer. The deletion, insertion, and search algorithms of the general Rtrees are not changed. 2D R-trees, each interval is mapped to a point in a 2D-space where the dimensions are the starting pt. and the finish pt. ...
... Each internal node entry contains a minimum bounding interval (MBI) and a child pointer. The deletion, insertion, and search algorithms of the general Rtrees are not changed. 2D R-trees, each interval is mapped to a point in a 2D-space where the dimensions are the starting pt. and the finish pt. ...

lecture 13 - CS
... Correctness: follows directly from Theorem 2. Complexity: Depends on the implementation of the set operations! A naïve implementation takes O(|V| |E|). – Sorting the edges takes O(|E| lg |E|). – the for loop goes over every edge and performs two Find-Set and one Union operation. These can be impleme ...
... Correctness: follows directly from Theorem 2. Complexity: Depends on the implementation of the set operations! A naïve implementation takes O(|V| |E|). – Sorting the edges takes O(|E| lg |E|). – the for loop goes over every edge and performs two Find-Set and one Union operation. These can be impleme ...




Use of Voronoi-based hierarchies in WSN (re)
... sensed value for each leaf node v'd,i, such that the average error, communication cost, and computation cost are decreased. Each set of sibling leaf nodes represents a group of neighboring clusters within a region splitting the data-space into q data ranges, where q ≥ f. The responsibility of the da ...
... sensed value for each leaf node v'd,i, such that the average error, communication cost, and computation cost are decreased. Each set of sibling leaf nodes represents a group of neighboring clusters within a region splitting the data-space into q data ranges, where q ≥ f. The responsibility of the da ...


Lossless Compression of Binary Trees with Correlated Vertex Names
... be the subset of T consisting of all trees with exactly n leaves. Similarly, let S and Sn be the set of all binary rooted nonplane trees with finitely many vertices and exactly n leaves, respectively. We can also augment our trees with vertex names – given the alphabet A, names are simply words from ...
... be the subset of T consisting of all trees with exactly n leaves. Similarly, let S and Sn be the set of all binary rooted nonplane trees with finitely many vertices and exactly n leaves, respectively. We can also augment our trees with vertex names – given the alphabet A, names are simply words from ...
Quadtree

A quadtree is a tree data structure in which each internal node has exactly four children. Quadtrees are most often used to partition a two-dimensional space by recursively subdividing it into four quadrants or regions. The regions may be square or rectangular, or may have arbitrary shapes. This data structure was named a quadtree by Raphael Finkel and J.L. Bentley in 1974. A similar partitioning is also known as a Q-tree. All forms of quadtrees share some common features: They decompose space into adaptable cells Each cell (or bucket) has a maximum capacity. When maximum capacity is reached, the bucket splits The tree directory follows the spatial decomposition of the quadtree.