

Applications of Trees
... We start with a forest of one vertex trees representing the input symbols. We recursively merge two trees whose sum of weights is minimal until we have only one tree. ...
... We start with a forest of one vertex trees representing the input symbols. We recursively merge two trees whose sum of weights is minimal until we have only one tree. ...

1 Review: Data Structures 2 Heaps: A quick review
... the sorted order. That is, find the element whose rank is one more (less). How much time does your procedure take? How do you delete an element? See if you can solve (recall) this before reading ahead. One way to do this is as follows: if the element e were a leaf then remove it. Otherwise, if e has ...
... the sorted order. That is, find the element whose rank is one more (less). How much time does your procedure take? How do you delete an element? See if you can solve (recall) this before reading ahead. One way to do this is as follows: if the element e were a leaf then remove it. Otherwise, if e has ...

Trees
... root, such that: -- for any node x, there exists exactly one path from the root to x Recursive Definition of a Tree: A tree is either: a. empty, or b. it has a node called the root, followed by zero or more trees called subtrees ...
... root, such that: -- for any node x, there exists exactly one path from the root to x Recursive Definition of a Tree: A tree is either: a. empty, or b. it has a node called the root, followed by zero or more trees called subtrees ...


Uses for Binary Trees…
... tree and push a pointer to it onto the stack. – If the symbol is an operator, pop two tree pointers T1 and T2 from the stack, and form a new tree whose root is the operator, and whose children are T1 and T2. – Push the new tree pointer on the stack. ...
... tree and push a pointer to it onto the stack. – If the symbol is an operator, pop two tree pointers T1 and T2 from the stack, and form a new tree whose root is the operator, and whose children are T1 and T2. – Push the new tree pointer on the stack. ...


FinalExamReviewS07
... • You should be able to show how these algorithms perform on a given red-black tree (except for delete), and tell their running time ...
... • You should be able to show how these algorithms perform on a given red-black tree (except for delete), and tell their running time ...

Applications of Trees
... We start with a forest of one vertex trees representing the input symbols. We recursively merge two trees whose sum of weights is minimal until we have only one tree. ...
... We start with a forest of one vertex trees representing the input symbols. We recursively merge two trees whose sum of weights is minimal until we have only one tree. ...

1 Persistent Data Structures
... • full persistence: queries and changes to all past versions (creates “multiple worlds” situtation) Goal: general technique that can be applied to any data structure. Application: planar point location. • planar subdivision – n segments meeting only at ends – defines set of polygons – query: “what p ...
... • full persistence: queries and changes to all past versions (creates “multiple worlds” situtation) Goal: general technique that can be applied to any data structure. Application: planar point location. • planar subdivision – n segments meeting only at ends – defines set of polygons – query: “what p ...

Applications of Trees
... We start with a forest of one vertex trees representing the input symbols. We recursively merge two trees whose sum of weights is minimal until we have only one tree. ...
... We start with a forest of one vertex trees representing the input symbols. We recursively merge two trees whose sum of weights is minimal until we have only one tree. ...

red-black tree
... by Leo J. Guibas and Robert Sedgewick. It is complex, but has good worst-case running time for its operations and is efficient in practice: it can search, insert, and delete in O(log n) time, where n is the number of elements in the tree. A red-black tree is a special type of binary tree, which is a ...
... by Leo J. Guibas and Robert Sedgewick. It is complex, but has good worst-case running time for its operations and is efficient in practice: it can search, insert, and delete in O(log n) time, where n is the number of elements in the tree. A red-black tree is a special type of binary tree, which is a ...

Tables
... locations in text that “match” path in trie (paths must start at character boundaries) Skip the nodes where there is no branching ( n-1 internal nodes) May 09 ...
... locations in text that “match” path in trie (paths must start at character boundaries) Skip the nodes where there is no branching ( n-1 internal nodes) May 09 ...

Midterm (with solution)
... 2. Assuming that BST is a perfect binary tree (each non leaf node has exactly two children). In terms of H, what is the complexity in time (big-Oh notation) of the following operations. (a) Printing BST using the in order traversal. (b) Printing BST using the post order traversal. (c) Printing BST u ...
... 2. Assuming that BST is a perfect binary tree (each non leaf node has exactly two children). In terms of H, what is the complexity in time (big-Oh notation) of the following operations. (a) Printing BST using the in order traversal. (b) Printing BST using the post order traversal. (c) Printing BST u ...
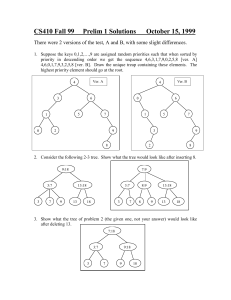
Prelim 1 solutions - Cornell Computer Science
... All operations should take worst-case time O(log n). You may use any of the data structures we have discussed in class without saying how they work, but describe in detail any modifications you need to do to achieve the desired time bounds, and describe in detail your implementation of count. Use an ...
... All operations should take worst-case time O(log n). You may use any of the data structures we have discussed in class without saying how they work, but describe in detail any modifications you need to do to achieve the desired time bounds, and describe in detail your implementation of count. Use an ...

Binary Search Tree
... Data structure of binary search tree • A BST tree can be represented by a linked data structure in which each node is an structure. – Key field – Satellite data – Pointers: left, right, and parent ...
... Data structure of binary search tree • A BST tree can be represented by a linked data structure in which each node is an structure. – Key field – Satellite data – Pointers: left, right, and parent ...

Binary search trees 1
... for these operations, and we can hang linked lists off a hash table if we use chaining. But we know linked lists are suboptimal for searching, because we must use linear search which in the worst case is O(n). ...
... for these operations, and we can hang linked lists off a hash table if we use chaining. But we know linked lists are suboptimal for searching, because we must use linear search which in the worst case is O(n). ...
Name
... left subtree; null if none right subtree; null if none this node’s parent; null if none (i.e., null if this is the root node) ...
... left subtree; null if none right subtree; null if none this node’s parent; null if none (i.e., null if this is the root node) ...

Trees and Tree Traversals
... in the following order: First, process the root node. 2. Then, recursively visit all nodes in the left subtree. 3. Finally, recursively visit all nodes in the right subtree. The traversal method works recursively, that is, once the root of the tree is processed, we go to the root of the left subtree ...
... in the following order: First, process the root node. 2. Then, recursively visit all nodes in the left subtree. 3. Finally, recursively visit all nodes in the right subtree. The traversal method works recursively, that is, once the root of the tree is processed, we go to the root of the left subtree ...

Searching: Binary Trees and Hash Tables
... for some of the basic operations Develop a class to implement binary search trees using linked storage structure for the data items (Optional) Look briefly at how threaded binary ...
... for some of the basic operations Develop a class to implement binary search trees using linked storage structure for the data items (Optional) Look briefly at how threaded binary ...


Lecture 4
... Ex: Full tree, all nodes store data, with two pointers to children Total space required is (2p + d)n (a tree of n nodes, p: space of a ...
... Ex: Full tree, all nodes store data, with two pointers to children Total space required is (2p + d)n (a tree of n nodes, p: space of a ...

Trees and Binary Search Trees Dynamic data structures Tree: Tree:
... will be a leaf (case 1), or have only a right subtree (case 2) --cannot have left subtree, or it’s not the minimum ...
... will be a leaf (case 1), or have only a right subtree (case 2) --cannot have left subtree, or it’s not the minimum ...

binary search tree
... Child and Parent Every node except the root has one parent A node can have zero or more children Leaves: nodes with no children Also called external nodes Internal node: having one or more children Siblings: nodes having the same parent ...
... Child and Parent Every node except the root has one parent A node can have zero or more children Leaves: nodes with no children Also called external nodes Internal node: having one or more children Siblings: nodes having the same parent ...

CE221_week_5_Chapter4_TreesBinary
... considerably smaller than N ( actually O( N ) ). For a special type of binary tree, namely the binary search tree, the average value of depth is O (log N). Unfortunately it can be as large as N - 1. ...
... considerably smaller than N ( actually O( N ) ). For a special type of binary tree, namely the binary search tree, the average value of depth is O (log N). Unfortunately it can be as large as N - 1. ...
Binary tree

In computer science, a binary tree is a tree data structure in which each node has at most two children, which are referred to as the left child and the right child. A recursive definition using just set theory notions is that a (non-empty) binary tree is a triple (L, S, R), where L and R are binary trees or the empty set and S is a singleton set. Some authors allow the binary tree to be the empty set as well.From a graph theory perspective, binary (and K-ary) trees as defined here are actually arborescences. A binary tree may thus be also called a bifurcating arborescence—a term which actually appears in some very old programming books, before the modern computer science terminology prevailed. It is also possible to interpret a binary tree as an undirected, rather than a directed graph, in which case a binary tree is an ordered, rooted tree. Some authors use rooted binary tree instead of binary tree to emphasize the fact that the tree is rooted, but as defined above, a binary tree is always rooted. A binary tree is a special case of an ordered K-ary tree, where k is 2.In computing, binary trees are seldom used solely for their structure. Much more typical is to define a labeling function on the nodes, which associates some value to each node. Binary trees labelled this way are used to implement binary search trees and binary heaps, and are used for efficient searching and sorting. The designation of non-root nodes as left or right child even when there is only one child present matters in some of these applications, in particular it is significant in binary search trees. In mathematics, what is termed binary tree can vary significantly from author to author. Some use the definition commonly used in computer science, but others define it as every non-leaf having exactly two children and don't necessarily order (as left/right) the children either.