
1994 Consciousness
... which is assured by nonconscious machinery. In spite of its widespread diffusion in cognitive science, this position is quite unreasonable, at least because of evolutionary concerns. Human beings have a first-person (conscious) understanding of their own behavior as being, at least in part, guided b ...
... which is assured by nonconscious machinery. In spite of its widespread diffusion in cognitive science, this position is quite unreasonable, at least because of evolutionary concerns. Human beings have a first-person (conscious) understanding of their own behavior as being, at least in part, guided b ...

A Survey on Artificial Intelligence and Robotics
... think about how to accomplish it. It consist of skills such as finding the shortest path between robot and room1, avoid the collision with any obstacles, navigate itself in correct direction etc. That means refinement deals with the proper set of actions or skills that helps robot to complete its ta ...
... think about how to accomplish it. It consist of skills such as finding the shortest path between robot and room1, avoid the collision with any obstacles, navigate itself in correct direction etc. That means refinement deals with the proper set of actions or skills that helps robot to complete its ta ...

Do robots equal humans? Anthropomorphic terminology in LAWS
... facilitates human interaction with robots (for example, we can talk to robots) or a hindrance which leads robot users to create excessive expectations towards robots (for example, we expect robots to fully understand the human language and reasoning) [3]. The anthropomorphisation of military robots ...
... facilitates human interaction with robots (for example, we can talk to robots) or a hindrance which leads robot users to create excessive expectations towards robots (for example, we expect robots to fully understand the human language and reasoning) [3]. The anthropomorphisation of military robots ...

How engineeRing caRRied out tHe PRoject
... metholdological aspects: the challenge concerns the management of complexity. How to achieve intelligent and adaptive behaviors out of the control system of the robot, which must remain intrisically simple? A third issue we address is the cultural one: the unreasonable expectations of the general pu ...
... metholdological aspects: the challenge concerns the management of complexity. How to achieve intelligent and adaptive behaviors out of the control system of the robot, which must remain intrisically simple? A third issue we address is the cultural one: the unreasonable expectations of the general pu ...

Human Computation - Interactive Computing Lab
... difficult problems that no known efficient computer algorithms can yet solve” (Chandrasekar, et al., 2010) • “…a technique that makes use of human abilities for computation to solve problems.” (Yuen, Chen, King, 2009) • “…a technique to let humans solve tasks, which cannot be solved by computers.” ( ...
... difficult problems that no known efficient computer algorithms can yet solve” (Chandrasekar, et al., 2010) • “…a technique that makes use of human abilities for computation to solve problems.” (Yuen, Chen, King, 2009) • “…a technique to let humans solve tasks, which cannot be solved by computers.” ( ...

Slide 1
... • What is the discrepancy? For individuals with severe delays can scores be translated into meaningful descriptions of ability? • If older individual, would it be best to select an instrument with a wider age range? • For a young child would it be better to focus on mental age scores w/a focus on de ...
... • What is the discrepancy? For individuals with severe delays can scores be translated into meaningful descriptions of ability? • If older individual, would it be best to select an instrument with a wider age range? • For a young child would it be better to focus on mental age scores w/a focus on de ...

the first of a series of anthropomimetic musculoskeletal upper torsos
... interactions such robots can engage in, on the knowledge they can acquire of their environment, and therefore on the nature of their cognitive engagement with the environment. The reasoning behind the complex platform described here is that an anthropomimetic (truly human-like) robot body will facil ...
... interactions such robots can engage in, on the knowledge they can acquire of their environment, and therefore on the nature of their cognitive engagement with the environment. The reasoning behind the complex platform described here is that an anthropomimetic (truly human-like) robot body will facil ...


AIReport
... processing data coming from the eyes. As our most powerful sense, sight is the primary means through which we understand the world around us. A single camera is not enough to simulate the eye. Two cameras are needed to give stereoscopic vision, which allows depth and movement perception. Even with t ...
... processing data coming from the eyes. As our most powerful sense, sight is the primary means through which we understand the world around us. A single camera is not enough to simulate the eye. Two cameras are needed to give stereoscopic vision, which allows depth and movement perception. Even with t ...
LEGO Mindstorms Hitachi H8-based RCX brick
... • General Electric Walking Truck. A human controlled the stepping of this robot by pushing pedals with his feet. The complicated coordination of movements within a leg and between different legs during stepping was controlled by a computer ...
... • General Electric Walking Truck. A human controlled the stepping of this robot by pushing pedals with his feet. The complicated coordination of movements within a leg and between different legs during stepping was controlled by a computer ...

Comparing Human and Automated Agents in a
... Comparing Human and Automated Agents in a Coordinated Navigation Domain Daniel Scarafoni, Mitchell Gordon, Walter S. Lasecki, Jeffrey Bigham University of Rochester, Department of Computer Science, Human Computer Interaction Group ...
... Comparing Human and Automated Agents in a Coordinated Navigation Domain Daniel Scarafoni, Mitchell Gordon, Walter S. Lasecki, Jeffrey Bigham University of Rochester, Department of Computer Science, Human Computer Interaction Group ...

think
... Knowing the precise theory of mind ( how human think?) expressing the theory as a computer program. GPS (General Problem Solver) [ by Newell & Simon, 1961] Were concerned with comparing the trace of its reasoning steps to traces of human subjects solving the same problem rather that correctly solv ...
... Knowing the precise theory of mind ( how human think?) expressing the theory as a computer program. GPS (General Problem Solver) [ by Newell & Simon, 1961] Were concerned with comparing the trace of its reasoning steps to traces of human subjects solving the same problem rather that correctly solv ...
side event briefings - Campaign to Stop Killer Robots
... Toby Walsh, University of New South Wales Prof. Walsh is a professor in artificial intelligence at the University of New South Wales in Sydney, Australia. He has served as scientific director of NICTA, Australia's research centre for Information and communications technology ICT research. Walsh is o ...
... Toby Walsh, University of New South Wales Prof. Walsh is a professor in artificial intelligence at the University of New South Wales in Sydney, Australia. He has served as scientific director of NICTA, Australia's research centre for Information and communications technology ICT research. Walsh is o ...


Artificial Intelligence - Academic Science,International Journal of
... processing based on a connectionist approach to computation (shown in fig. 2). In most cases an ANN is an adaptive system that changes its structure based on external or internal information that flows through the network [11]. In more practical terms neural networks are nonlinear statistical data m ...
... processing based on a connectionist approach to computation (shown in fig. 2). In most cases an ANN is an adaptive system that changes its structure based on external or internal information that flows through the network [11]. In more practical terms neural networks are nonlinear statistical data m ...
Paper Prototyping - SIUE Robotics - Southern Illinois University
... – Stability reduces overhead of support, malignance, and troubleshoot ...
... – Stability reduces overhead of support, malignance, and troubleshoot ...

Human Computation and Crowdsroucing
... difficult problems that no known efficient computer algorithms can yet solve” (Chandrasekar, et al., 2010) • “…a technique that makes use of human abilities for computation to solve problems.” (Yuen, Chen, King, 2009) • “…a technique to let humans solve tasks, which cannot be solved by computers.” ( ...
... difficult problems that no known efficient computer algorithms can yet solve” (Chandrasekar, et al., 2010) • “…a technique that makes use of human abilities for computation to solve problems.” (Yuen, Chen, King, 2009) • “…a technique to let humans solve tasks, which cannot be solved by computers.” ( ...

Imagination, Human and Artificial Donald Perlis
... from reasoning that as B, C, D, and E are taken off the stack, it is helpful to place them in convenient locations for ease of rebuilding that grouping afterwards. These issues are not addressed in traditional AI planning. While this is just one example, I hope that it makes a compelling case for th ...
... from reasoning that as B, C, D, and E are taken off the stack, it is helpful to place them in convenient locations for ease of rebuilding that grouping afterwards. These issues are not addressed in traditional AI planning. While this is just one example, I hope that it makes a compelling case for th ...

Hybrid Intelligence and the Future of Work
... intelligence can help to create reliable systems that are not bounded by the limitations of current AI systems today. Human computation platforms like Amazon Mechanical Turk provide on demand access to human intelligence in a scalable way so that human intelligence can be used as a resource in the ...
... intelligence can help to create reliable systems that are not bounded by the limitations of current AI systems today. Human computation platforms like Amazon Mechanical Turk provide on demand access to human intelligence in a scalable way so that human intelligence can be used as a resource in the ...

Lecture Notes CS405 Introduction to AI What is Artificial Intelligence
... various search-engine technologies on the WWW, some that understand rudimentary questions. 6. Modeling Human Performance. As described earlier, machine intelligence need not pattern itself after human intelligence. Indeed, many AI programs are engineered to solve useful problems without regard for t ...
... various search-engine technologies on the WWW, some that understand rudimentary questions. 6. Modeling Human Performance. As described earlier, machine intelligence need not pattern itself after human intelligence. Indeed, many AI programs are engineered to solve useful problems without regard for t ...

in my own words The Future Comes on Two Robotic Feet
... my early 20s are now robotics professors or they drive the Curiosity rover or they’re building autonomous vehicles for Google or doing something else in the world of robotics. They’re my friends, so I can call them and ask, “What are you doing?” And I can still understand most of what they say. I st ...
... my early 20s are now robotics professors or they drive the Curiosity rover or they’re building autonomous vehicles for Google or doing something else in the world of robotics. They’re my friends, so I can call them and ask, “What are you doing?” And I can still understand most of what they say. I st ...
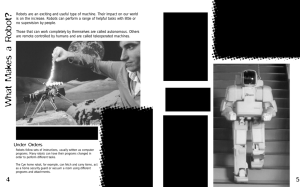
robot
... Robots are an exciting and useful type of machine. Their impact on our world is on the increase. Robots can perform a range of helpful tasks with little or no supervision by people. Those that can work completely by themselves are called autonomous. Others are remote controlled by humans and are cal ...
... Robots are an exciting and useful type of machine. Their impact on our world is on the increase. Robots can perform a range of helpful tasks with little or no supervision by people. Those that can work completely by themselves are called autonomous. Others are remote controlled by humans and are cal ...