
Is the search for computer-based artificial intelligence an
... 30). Autonomous agents, such as SubjuGator, can spare human soldiers in military operations that require dangerous underwater missions for long periods of time or explosives. These vehicles are being made increasingly smaller and more powerful, soon able to be nearly undetectable. While SubjuGator i ...
... 30). Autonomous agents, such as SubjuGator, can spare human soldiers in military operations that require dangerous underwater missions for long periods of time or explosives. These vehicles are being made increasingly smaller and more powerful, soon able to be nearly undetectable. While SubjuGator i ...

Preface to the AAAI Spring Symposium on AI and the Mitigation of
... cases of supervised autonomy, where a human oversees several interdependent autonomous systems; where an autonomous agent is working with a team of humans, such as in a network cyber defense; or where the agent is intended to replace effective, but traditionally workerintensive team tasks, such as w ...
... cases of supervised autonomy, where a human oversees several interdependent autonomous systems; where an autonomous agent is working with a team of humans, such as in a network cyber defense; or where the agent is intended to replace effective, but traditionally workerintensive team tasks, such as w ...

full document - Intelligent Systems Laboratory
... reasoning paradigms such as model-based, constraintbased or case-based reasoning, although promising in some respects, (see [Borning, 1977; Castillo, 1991; Catsimpoolas, 1992]) are not "natural" for this form of knowledge since they do not easily capture the heuristics involved in tactical behavior ...
... reasoning paradigms such as model-based, constraintbased or case-based reasoning, although promising in some respects, (see [Borning, 1977; Castillo, 1991; Catsimpoolas, 1992]) are not "natural" for this form of knowledge since they do not easily capture the heuristics involved in tactical behavior ...
Poster title - Tarleton State University
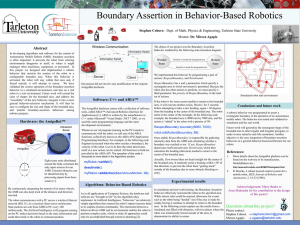
... discussed in more detail in the Algorithms section. ...
... discussed in more detail in the Algorithms section. ...

An Ontology-Based Symbol Grounding System for Human
... One of the fundamental issues in HRI is to enable robust mappings of the robot’s low-level perceptions of the world and the symbolic terms used by humans to describe the world. When a shared symbol grounding is achieved (when human and robot use the same terms to denote the same physical entities) a ...
... One of the fundamental issues in HRI is to enable robust mappings of the robot’s low-level perceptions of the world and the symbolic terms used by humans to describe the world. When a shared symbol grounding is achieved (when human and robot use the same terms to denote the same physical entities) a ...

View PDF - Advances in Cognitive Systems
... gesture understanding. The robot must have a model of the home and models of what the human occupants expect the robot to do for them. It needs the models so that robot and human know they are referring to the same objects and so it can reason about commands or questions given to it. They are also n ...
... gesture understanding. The robot must have a model of the home and models of what the human occupants expect the robot to do for them. It needs the models so that robot and human know they are referring to the same objects and so it can reason about commands or questions given to it. They are also n ...

Title Embedding intelligent decision making within complex dynamic
... Intelligent systems have been the subject of active research since the 1960s. As a result of this, many techniques have been developed including neural networks, fuzzy reasoning, machine learning, casebased reasoning, decision support systems and intelligent agents. Each technique encompasses charac ...
... Intelligent systems have been the subject of active research since the 1960s. As a result of this, many techniques have been developed including neural networks, fuzzy reasoning, machine learning, casebased reasoning, decision support systems and intelligent agents. Each technique encompasses charac ...
Artificial Intelligence
... personalized medicine a single drug can cure one person and kill another, so adaptive dispensing will be critical. Correcting what doesn’t work will be mandatory as this technology evolves. If you cannot measure it, you cannot fix it. Autonomous Combat Weapon Systems The use of fully autonomous weap ...
... personalized medicine a single drug can cure one person and kill another, so adaptive dispensing will be critical. Correcting what doesn’t work will be mandatory as this technology evolves. If you cannot measure it, you cannot fix it. Autonomous Combat Weapon Systems The use of fully autonomous weap ...
1.5 Impact of emerging technologies
... Artificial intelligence (AI) is computer systems that can simulate human intelligence (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is kno ...
... Artificial intelligence (AI) is computer systems that can simulate human intelligence (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is kno ...

Apprenticeship Scheduling for Human
... I have motivated the advantages of autonomous scheduling algorithms in team coordination. The challenge then remains of how we can learn the heuristics and rules-ofthumb of human domain experts to automatically schedule processes. I have personally seen human domain experts who are able to effective ...
... I have motivated the advantages of autonomous scheduling algorithms in team coordination. The challenge then remains of how we can learn the heuristics and rules-ofthumb of human domain experts to automatically schedule processes. I have personally seen human domain experts who are able to effective ...

Landing Safely Where the Science Demands
... relative doppler, stereo imager, stored picture files, radar – Outputs to all the necessary actuators — thrusters, chute, control surfaces – Software: e.g.: remote agent, stereo image processing provide real-time steering cues for hazard avoidance and intelligent target approach. ...
... relative doppler, stereo imager, stored picture files, radar – Outputs to all the necessary actuators — thrusters, chute, control surfaces – Software: e.g.: remote agent, stereo image processing provide real-time steering cues for hazard avoidance and intelligent target approach. ...

Demonstration - ECpE Senior Design
... • Wheel motors are powered by battery • Wheel motors drive a belt to rotate the wheels • Need two tachometers to figure out the speed of each wheel ...
... • Wheel motors are powered by battery • Wheel motors drive a belt to rotate the wheels • Need two tachometers to figure out the speed of each wheel ...
How to keep robot/AI under control?
... hand, self-controlled machines are creating uncertainty, as people are afraid what will happen when they malfunction or improve so much, that people lose control over them. Out of previously mentioned two issues, easier are robots that are malfunctioning, as people have skills to fix issue. For exam ...
... hand, self-controlled machines are creating uncertainty, as people are afraid what will happen when they malfunction or improve so much, that people lose control over them. Out of previously mentioned two issues, easier are robots that are malfunctioning, as people have skills to fix issue. For exam ...
Artificial Intelligence
... This consists of reading a pre-defined text into the computer for about twenty minutes. While you are reading the text the computer is sampling your voice and matching it to sounds which are common in all words. The reason everyone has to go through this training process is because of the characteri ...
... This consists of reading a pre-defined text into the computer for about twenty minutes. While you are reading the text the computer is sampling your voice and matching it to sounds which are common in all words. The reason everyone has to go through this training process is because of the characteri ...

Computer Systems Theory of Computation Computer Architecture
... Control And Filtering Theory Barmish, Cavusoglu, Lin, Loparo Topics include: (1) nonlinear control theory work addressing questions regarding the behavior, stability and control of dynamic systems that are inherently nonlinear in the relationships between their inputs, outputs, and internal states; ...
... Control And Filtering Theory Barmish, Cavusoglu, Lin, Loparo Topics include: (1) nonlinear control theory work addressing questions regarding the behavior, stability and control of dynamic systems that are inherently nonlinear in the relationships between their inputs, outputs, and internal states; ...
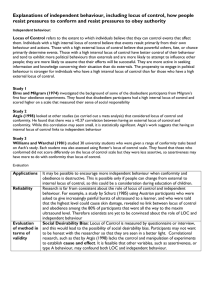
Click here for document about independent behaviour
... electric shocks when they thought the victim was distressed or in pain. When participants were able to see or even touch the victim, obedience dropped to 40% and 30% respectively. Only 16% of female students in an Australian study (see Kilham and Mann, 1974) gave the full shock level of 450 volts. T ...
... electric shocks when they thought the victim was distressed or in pain. When participants were able to see or even touch the victim, obedience dropped to 40% and 30% respectively. Only 16% of female students in an Australian study (see Kilham and Mann, 1974) gave the full shock level of 450 volts. T ...

A Developmental Approach to Intelligence
... has a three dimensional physical structure in real space. Sensors: It is endowed with some sensory apparatus that is used to perceive its environment. Actuators: It is capable of physically changing the environment in some way, either by moving around or manipulating objects. Symbols: Modeling of th ...
... has a three dimensional physical structure in real space. Sensors: It is endowed with some sensory apparatus that is used to perceive its environment. Actuators: It is capable of physically changing the environment in some way, either by moving around or manipulating objects. Symbols: Modeling of th ...

Considerations Regarding Human-Level Artificial Intelligence
... maps, graphical image models, episodic memory, and case studies. Recent work has emphasized object-oriented forms of both logical and probabilistic knowledge representation schemes. In fact, there has been progress toward unifying probabilistic and first-order representations. For versatile use of d ...
... maps, graphical image models, episodic memory, and case studies. Recent work has emphasized object-oriented forms of both logical and probabilistic knowledge representation schemes. In fact, there has been progress toward unifying probabilistic and first-order representations. For versatile use of d ...

Intelligent Robotics and Multi-Agent Systems
... Multi-agent systems (MAS) are groups of intelligent agents that can perceive and act in a given environment to achieve their individual and collective goals. MAS enable solving problems that are beyond the individual capabilities and knowledge of single agents, not suffering from resource limitation ...
... Multi-agent systems (MAS) are groups of intelligent agents that can perceive and act in a given environment to achieve their individual and collective goals. MAS enable solving problems that are beyond the individual capabilities and knowledge of single agents, not suffering from resource limitation ...


Addressing Sustainability via AI - Report from the 23rd International
... “It is good to see that we are still better at playing Angry Birds than AI and Angry Birds remains a very challenging problem for Artificial Intelligence. It seems that AI at the moment is clearly better than beginners, but cannot yet match the experience of the best human players,” the organizer co ...
... “It is good to see that we are still better at playing Angry Birds than AI and Angry Birds remains a very challenging problem for Artificial Intelligence. It seems that AI at the moment is clearly better than beginners, but cannot yet match the experience of the best human players,” the organizer co ...


ARTIFICIAL INTELLIGENCE: THE FUTURE OF COMMAND AND
... An interesting parallel can be drawn between the relationship linking command with control, and the one linking the cognitive approach to AI with the engineering approach. Just as command represents the defining element of C2, the cognitive, or human, approach represents the foundation of AI. Ironic ...
... An interesting parallel can be drawn between the relationship linking command with control, and the one linking the cognitive approach to AI with the engineering approach. Just as command represents the defining element of C2, the cognitive, or human, approach represents the foundation of AI. Ironic ...

2014 NEURAL NETWORKS AND FUZZY LOGIC CONTROL
... ARCHITECTURES: Introduction –Biological neuron-Artificial neuron-Neuron modeling, Learning rules, Single layer, Multi layer feed forward network-Back propagation, Learning factors. UNIT-II ...
... ARCHITECTURES: Introduction –Biological neuron-Artificial neuron-Neuron modeling, Learning rules, Single layer, Multi layer feed forward network-Back propagation, Learning factors. UNIT-II ...