
Artificial Intelligence System Designer
... of another method: artificial NN, reinforcement learning, fuzzy logic or any another approach. ...
... of another method: artificial NN, reinforcement learning, fuzzy logic or any another approach. ...
Control architectures of a cognitive robot
... • from simple survival behaviors (like not running out of power) • to complex activities (like acting in a robot-soccer ...
... • from simple survival behaviors (like not running out of power) • to complex activities (like acting in a robot-soccer ...
robot - kmutt-inc
... Karel Capek’s 1921 play RUR (Rossum’s Universal Robots) มาจากคาว่ า “rabota” (obligatory work) ...
... Karel Capek’s 1921 play RUR (Rossum’s Universal Robots) มาจากคาว่ า “rabota” (obligatory work) ...
Robotics: Integrated Systems Design Mechanics, Electronics
... • How do I get there? – Path Finding Problem • How do I find the door? – Object Recognition Problem • What are you asking me to do? – Language Understanding Problem • How can I tell you the answer to your question? – Speech Generation Problem ...
... • How do I get there? – Path Finding Problem • How do I find the door? – Object Recognition Problem • What are you asking me to do? – Language Understanding Problem • How can I tell you the answer to your question? – Speech Generation Problem ...

Robot Soccer
... • Two RoboClaws, each with UART • Python script from RoboClaw manufacturer • Data to/from encoders can be in quadrature ticks, duty, or integer ...
... • Two RoboClaws, each with UART • Python script from RoboClaw manufacturer • Data to/from encoders can be in quadrature ticks, duty, or integer ...

Control Systems
... physical components connected/related in such a manner as to command, direct or regulate itself or another system. ...
... physical components connected/related in such a manner as to command, direct or regulate itself or another system. ...

Behaviour mining for collision avoidance in multi
... in the physical world and in virtual settings. For example, gamers immersed in virtual environments simulating mobile agents can quickly identify potential collisions and effect evasive action. In a multi-robot system, avoiding collisions is a necessary behaviour as well. The work presented here tak ...
... in the physical world and in virtual settings. For example, gamers immersed in virtual environments simulating mobile agents can quickly identify potential collisions and effect evasive action. In a multi-robot system, avoiding collisions is a necessary behaviour as well. The work presented here tak ...
Artificial Intelligence (AI)
... in robots and they areFirst-Generation Universal Robots: Lizard-scale intelligence Second-Generation Universal Robots: Mouse-scale intelligence Third-Generation Universal Robots: Monkey-scale intelligence Fourth-Generation Universal Robots: Human-scale intelligence. Te fourth generation is what AI i ...
... in robots and they areFirst-Generation Universal Robots: Lizard-scale intelligence Second-Generation Universal Robots: Mouse-scale intelligence Third-Generation Universal Robots: Monkey-scale intelligence Fourth-Generation Universal Robots: Human-scale intelligence. Te fourth generation is what AI i ...

Ch_13
... Special-purpose solution relies on the circumstances that pertain to the task; General-purpose solutions: can be applied to a broad variety of problems: Means-ends analysis: the machine assesses the current state of the system and chooses an action that will reduce the difference between the current ...
... Special-purpose solution relies on the circumstances that pertain to the task; General-purpose solutions: can be applied to a broad variety of problems: Means-ends analysis: the machine assesses the current state of the system and chooses an action that will reduce the difference between the current ...

Robots: friend or foe? – exercises
... Reading skills practice: Robots: friend or foe? – exercises What is the future of artificial intelligence (AI)? Will robots become as intelligent as humans? Or more ...
... Reading skills practice: Robots: friend or foe? – exercises What is the future of artificial intelligence (AI)? Will robots become as intelligent as humans? Or more ...
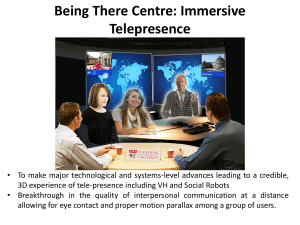
Affective Behavior Models for Virtual Humans and Social Robots
... Put a machine and a human in a room and send in written questions. If we cannot tell which answers are from the machine or the human, the machine is thinking… ...
... Put a machine and a human in a room and send in written questions. If we cannot tell which answers are from the machine or the human, the machine is thinking… ...
Introduction autonomous mobile systems and AI planning
... modules and how they interact with each other ...
... modules and how they interact with each other ...

Darwin`s Library - Shepherd University
... Self-deluded people tend to have higher expectations for their performance, which increases the likelihood of victory by increasing the costs that they are willing to pay in order to win. ...
... Self-deluded people tend to have higher expectations for their performance, which increases the likelihood of victory by increasing the costs that they are willing to pay in order to win. ...

Adaptive dynamical systems: A promising tool for embodied artificial
... In a “proof of principle” implementation in a simulation [2] we showed that we can extend a simple dynamical system (i.e. an oscillator) with an additional state variable and the corresponding evolution law (i.e. differential equation) in order to make it adaptive to a mechanical structure. The mech ...
... In a “proof of principle” implementation in a simulation [2] we showed that we can extend a simple dynamical system (i.e. an oscillator) with an additional state variable and the corresponding evolution law (i.e. differential equation) in order to make it adaptive to a mechanical structure. The mech ...

Materialy/06/Lecture1- ICM Introduction
... Not only deterministic but also stochastic system behavior Not all inputs controllable Control signals have physical restrictions (valves, supplies, ...) Time delay (algebraic => exponential equations) ...
... Not only deterministic but also stochastic system behavior Not all inputs controllable Control signals have physical restrictions (valves, supplies, ...) Time delay (algebraic => exponential equations) ...
Mobile Robot Exhibition Schedule
... will present human interaction system with a realistic human face. The team will present battery-powered, compact heads animated by a suite of AI and perceptual software, including face-perceiving machine vision, speaker independent speech recognition, speech synthesis, and natural language interact ...
... will present human interaction system with a realistic human face. The team will present battery-powered, compact heads animated by a suite of AI and perceptual software, including face-perceiving machine vision, speaker independent speech recognition, speech synthesis, and natural language interact ...
Lecture 14
... • Task: Go to black area to turn on light, then go to area under light • Requires a policy change in mid-task: Reconfigure weights for new policy Blynel, J. and Floreano, D. (2002) Levels of Dynamics and Adaptive Behavior in Evolutionary Neural Controllers. In B. Hallam, D. Floreano, J. Hallam, G. H ...
... • Task: Go to black area to turn on light, then go to area under light • Requires a policy change in mid-task: Reconfigure weights for new policy Blynel, J. and Floreano, D. (2002) Levels of Dynamics and Adaptive Behavior in Evolutionary Neural Controllers. In B. Hallam, D. Floreano, J. Hallam, G. H ...

Stuart Russell
... What is AI? The intelligent connection of perception to action An AI system is intelligent to the extent that it does the right thing given the available information The right thing = the action expected to achieve the goal (or ...
... What is AI? The intelligent connection of perception to action An AI system is intelligent to the extent that it does the right thing given the available information The right thing = the action expected to achieve the goal (or ...

Machine Learning Methods for Individualizing Just in Time Adaptive Interventions Getting SMART about Adapting Interventions
... Mobile devices are being increasingly used by health researchers to collect symptoms and other information and to provide interventions in real time. These “Just in Time Adaptive Interventions" specify how patient information should be used to determine whether, when and which intervention to provid ...
... Mobile devices are being increasingly used by health researchers to collect symptoms and other information and to provide interventions in real time. These “Just in Time Adaptive Interventions" specify how patient information should be used to determine whether, when and which intervention to provid ...

Computers - Robot Presentation
... jobs in industry. Most of the products we buy today have been at some stage manufactured by computer operated machines. Naturally robots do unpleasant and dangerous tasks so humans no longer have to. ...
... jobs in industry. Most of the products we buy today have been at some stage manufactured by computer operated machines. Naturally robots do unpleasant and dangerous tasks so humans no longer have to. ...

Intelligent Mobile Robotics
... such as the Mars Rover, and entertainment robots such as AIBO. An “intelligent mobile robot” is an integrated mechanical, electrical, and computational system that can function autonomously in the physical world. Unbound from the shackles of the stationary desktop, a mobile robot must engender a var ...
... such as the Mars Rover, and entertainment robots such as AIBO. An “intelligent mobile robot” is an integrated mechanical, electrical, and computational system that can function autonomously in the physical world. Unbound from the shackles of the stationary desktop, a mobile robot must engender a var ...
01A
... o Negnevitsky: “Ability to learn and understanc, to solve problems and make decisions.” o Kurzweil: “…machines that perform functions that require intelligence when performed by people.” o Coppin: “…systems that act in a way that to any observer would appear to be intelligent.” o Coppin: “…using met ...
... o Negnevitsky: “Ability to learn and understanc, to solve problems and make decisions.” o Kurzweil: “…machines that perform functions that require intelligence when performed by people.” o Coppin: “…systems that act in a way that to any observer would appear to be intelligent.” o Coppin: “…using met ...
Artificial Intelligence & Robotics
... Artificial Intelligence – The collective attributes of a computer, robot, or other device capable of performing functions such as learning, decision making, or other intelligent human behaviors. Autonomous Agent – A hardware (or software) based system that has the following properties: autonomy - ab ...
... Artificial Intelligence – The collective attributes of a computer, robot, or other device capable of performing functions such as learning, decision making, or other intelligent human behaviors. Autonomous Agent – A hardware (or software) based system that has the following properties: autonomy - ab ...

the netherlands 26 - 30 JUne
... countries will compete with teams of fully autonomous robots in household and service tasks, rescue operations and of course: football. RoboCup is a great boost for research and development of robotics and artificial intelligence, to support us in our everyday lives in an ageing society. www.robocup ...
... countries will compete with teams of fully autonomous robots in household and service tasks, rescue operations and of course: football. RoboCup is a great boost for research and development of robotics and artificial intelligence, to support us in our everyday lives in an ageing society. www.robocup ...