

(pdf)
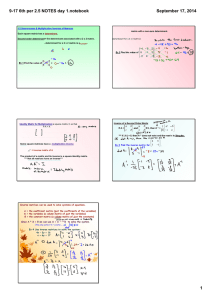
... List the free variables for the system Ax = b and find a basis for the vector space null(A). Find the rank(A). 3. Explain why the rows of a 3 × 5 matrix have to be linearly dependent. 4. Let A be a matrix wich is not the identity and assume that A2 = A. By contradiction show that A is not invertible ...
... List the free variables for the system Ax = b and find a basis for the vector space null(A). Find the rank(A). 3. Explain why the rows of a 3 × 5 matrix have to be linearly dependent. 4. Let A be a matrix wich is not the identity and assume that A2 = A. By contradiction show that A is not invertible ...

Accelerated Math II – Test 1 – Matrices
... dimension of a matrix column matrix row matrix square matrix zero matrix identity matrix scalar determinant inverse matrix invertible (nonsingular) and non-invertible (singular) matrix equation coefficient matrix digraph adjacency matrix linear programming: objective function, constraints, feasible ...
... dimension of a matrix column matrix row matrix square matrix zero matrix identity matrix scalar determinant inverse matrix invertible (nonsingular) and non-invertible (singular) matrix equation coefficient matrix digraph adjacency matrix linear programming: objective function, constraints, feasible ...

11.1: Matrix Operations - Algebra 1 and Algebra 2
... (+) Use matrices to represent and manipulate data, e.g., to represent payoffs or incidence relationships in a network. N.VM.7: Perform operations on matrices and use matrices in applications. (+) Multiply matrices by scalars to produce new matrices, e.g., as when all of the payoffs in a game a ...
... (+) Use matrices to represent and manipulate data, e.g., to represent payoffs or incidence relationships in a network. N.VM.7: Perform operations on matrices and use matrices in applications. (+) Multiply matrices by scalars to produce new matrices, e.g., as when all of the payoffs in a game a ...

Classification of linear transformations from R2 to R2 In mathematics
... In mathematics, one way we “understand” mathematical objects is to classify them (when we can). For this, we have some definition of the objects as being isomorphic (essentially the same), and then understand when two objects are isomorphic. If we’re really lucky, we have a list of clear examples su ...
... In mathematics, one way we “understand” mathematical objects is to classify them (when we can). For this, we have some definition of the objects as being isomorphic (essentially the same), and then understand when two objects are isomorphic. If we’re really lucky, we have a list of clear examples su ...

4.1 Using Matrices to Represent Data
... * A _______________ (plural _____________) is a rectangular array of numbers enclosed in a single set of brackets. ...
... * A _______________ (plural _____________) is a rectangular array of numbers enclosed in a single set of brackets. ...


LOYOLA COLLEGE (AUTONOMOUS), CHENNAI – 600 034 1
... 15. Prove that a basis of a subspace S, can always be selected out of a set of vectors which span S. 16. Show that the set of 3 vectors X1 = (1 0 0 ), X2 = (0 1 0) and X3 = (0 0 1) is linearly independent. 17. (a) State the properties of linear transformation. (b) Prove that a linear transformation ...
... 15. Prove that a basis of a subspace S, can always be selected out of a set of vectors which span S. 16. Show that the set of 3 vectors X1 = (1 0 0 ), X2 = (0 1 0) and X3 = (0 0 1) is linearly independent. 17. (a) State the properties of linear transformation. (b) Prove that a linear transformation ...

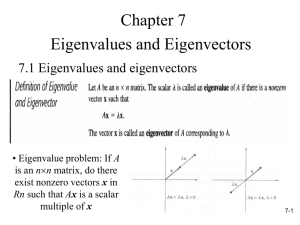
Chapter 8 Matrices and Determinants
... • Rectangular array of numbers called entries • Dimensions of a matrix are number of rows by the number of columns ...
... • Rectangular array of numbers called entries • Dimensions of a matrix are number of rows by the number of columns ...


solution of equation ax + xb = c by inversion of an m × m or n × n matrix
... for X, where X and C are M × N real matrices, A is an M × M real matrix, and B is an N × N real matrix. A familiar example occurs in the Lyapunov theory of stability [1], [2], [3] with B = AT . Is also arises in the theory of structures [4]. Using the notation P × Q to denote the Kronecker product ( ...
... for X, where X and C are M × N real matrices, A is an M × M real matrix, and B is an N × N real matrix. A familiar example occurs in the Lyapunov theory of stability [1], [2], [3] with B = AT . Is also arises in the theory of structures [4]. Using the notation P × Q to denote the Kronecker product ( ...

Playing with Matrix Multiplication Solutions Linear Algebra 1
... (a) To find all the matrices B that commute with A, first write B with unknown entries: ...
... (a) To find all the matrices B that commute with A, first write B with unknown entries: ...




Homework 5 - UMass Math
... 3. Compute y = F8 c by the three steps of the Fast Fourier Transform, for each of c = (1, 0, 1, 0, 1, 0, 1, 0) and c = (0, 1, 0, 1, 0, 1, 0, 1). ...
... 3. Compute y = F8 c by the three steps of the Fast Fourier Transform, for each of c = (1, 0, 1, 0, 1, 0, 1, 0) and c = (0, 1, 0, 1, 0, 1, 0, 1). ...
Macro
... • Row vector, column vector, matrix • Matrix operations (addition, scalar multiplication) • Transpose(matrix) • matrix multiplication: Mmult(matrix 1; matrix 2) • Inverse of a matrix: Minverse(matrix) ...
... • Row vector, column vector, matrix • Matrix operations (addition, scalar multiplication) • Transpose(matrix) • matrix multiplication: Mmult(matrix 1; matrix 2) • Inverse of a matrix: Minverse(matrix) ...

Uniqueness of Reduced Row Echelon Form
... we need to show R = S. Suppose R 6= S to the contrary. Then select the first (leftmost) column at which R and S differ and also select all leading 1 columns to the left of this column, giving rise to two matrices R0 and S 0 . For example, if ...
... we need to show R = S. Suppose R 6= S to the contrary. Then select the first (leftmost) column at which R and S differ and also select all leading 1 columns to the left of this column, giving rise to two matrices R0 and S 0 . For example, if ...


Worksheet 9 - Midterm 1 Review Math 54, GSI
... 12. True or false: AT A = AAT for every n × n matrix A. Justify your answer. 13. True or false: Every subspace U ⊂ Rn is the null space (same as kernel) of a linear transformation T : Rn → Rk for some k. Justify your answer. 14. An n × n matrix is said to be symmetric if AT = A and anti-symmetric if ...
... 12. True or false: AT A = AAT for every n × n matrix A. Justify your answer. 13. True or false: Every subspace U ⊂ Rn is the null space (same as kernel) of a linear transformation T : Rn → Rk for some k. Justify your answer. 14. An n × n matrix is said to be symmetric if AT = A and anti-symmetric if ...