
cooper lighting - lumark
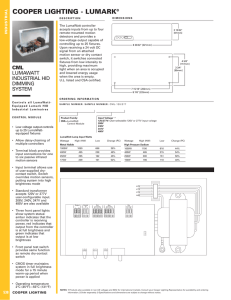
... overrides motion sensors, putting system into high brightness mode • Standard transformer accepts 120V or 277V user-configurable input. 208V, 240V, 347V and 480V are also available ...
... overrides motion sensors, putting system into high brightness mode • Standard transformer accepts 120V or 277V user-configurable input. 208V, 240V, 347V and 480V are also available ...

1. Introduction - National Cheng Kung University
... 1960s control theories : state space & stability, dynamic programming, system identification 1970s different estimation schemes combined with various design methods Late 1970s-1980s proofs for stability of adaptive systems, merge of robust control and system identification ...
... 1960s control theories : state space & stability, dynamic programming, system identification 1970s different estimation schemes combined with various design methods Late 1970s-1980s proofs for stability of adaptive systems, merge of robust control and system identification ...




Document
... This paper explores the large-signal and small-signal dynamics of a seriescapacitor (SC) buck-type converter and introduces an optimal closed-loop control scheme to accommodate both the steady-state and transient modes. As opposed to a conventional buck converter, where time-optimal control is reali ...
... This paper explores the large-signal and small-signal dynamics of a seriescapacitor (SC) buck-type converter and introduces an optimal closed-loop control scheme to accommodate both the steady-state and transient modes. As opposed to a conventional buck converter, where time-optimal control is reali ...


- Career Funda
... 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon human judgment (c) internal system changes automatically taken care of (d) both (a) and (b) (e) all (a),(b) and (c) 2. A servo system must have (a) feedback ...
... 1. An open loop control system has its (a) control action independent of the output or desired quantity (b) controlling action, depending upon human judgment (c) internal system changes automatically taken care of (d) both (a) and (b) (e) all (a),(b) and (c) 2. A servo system must have (a) feedback ...


assignment 2 answers
... 3. Instruction List (IL) -assembler-type, text based language for building small applications or optimizing complex systems. 4. Function Block Diagram (FBD) -graphical depiction of process flow using simple and complex building blocks, ranging from analog I/O to closed loop control, algorithms, and ...
... 3. Instruction List (IL) -assembler-type, text based language for building small applications or optimizing complex systems. 4. Function Block Diagram (FBD) -graphical depiction of process flow using simple and complex building blocks, ranging from analog I/O to closed loop control, algorithms, and ...
The Process
... Continuous or analog control is related to the varying quantities such as temperature, speed, … change gradually and continuously across an infinite of values. ...
... Continuous or analog control is related to the varying quantities such as temperature, speed, … change gradually and continuously across an infinite of values. ...
DPCL Solid State Device Discrete Control Lecture
... Process Switches are frequently used as safety interlocking devices. Interlock – shutdown system Pressure, level, temperature, flow vibration etc. The safe way to wire these devices is to assume that the normal process condition will result in a closed switch that is there will be current flow to th ...
... Process Switches are frequently used as safety interlocking devices. Interlock – shutdown system Pressure, level, temperature, flow vibration etc. The safe way to wire these devices is to assume that the normal process condition will result in a closed switch that is there will be current flow to th ...

Faculty of Electrical Engineering Three phase permanent magnet
... based on electronic commutation where it requires a drive unit, which consists of inverter and driver, positioning sensor for sensored type drive and a microcontroller controlling the step of commutation. Precise commutation steps is crucial in order to achieve reliable speed and radial displacement ...
... based on electronic commutation where it requires a drive unit, which consists of inverter and driver, positioning sensor for sensored type drive and a microcontroller controlling the step of commutation. Precise commutation steps is crucial in order to achieve reliable speed and radial displacement ...



ECE445 Projects
... The transfer function of the controller, with the particular pole and zero values determined. A Matlab Bode plot the loop gain. (Use the Matlab MARGIN command.) A Matlab Bode plot of the open and closed loop audio-susceptibility (on the same plot). A Matlab Bode plot of the open and closed loop outp ...
... The transfer function of the controller, with the particular pole and zero values determined. A Matlab Bode plot the loop gain. (Use the Matlab MARGIN command.) A Matlab Bode plot of the open and closed loop audio-susceptibility (on the same plot). A Matlab Bode plot of the open and closed loop outp ...
Lecture 6: Problems and Solutions
... • A digital system works at 0 and 5 volts. – Analog systems want to output control signals over a continuous range. – How can we do it? ...
... • A digital system works at 0 and 5 volts. – Analog systems want to output control signals over a continuous range. – How can we do it? ...


EL3500 Multi Loop Controller Description
... Universal Inputs - Accepts RTD’s, mA, mV or voltage input through simple configurations (other inputs also available). Setpoint Ramp - A configurable ramp rate or a single programmable setpoint ramp up to 4-1/4 hours adds to start-up flexibility. Heat/Cool Capability - Provides split-range control w ...
... Universal Inputs - Accepts RTD’s, mA, mV or voltage input through simple configurations (other inputs also available). Setpoint Ramp - A configurable ramp rate or a single programmable setpoint ramp up to 4-1/4 hours adds to start-up flexibility. Heat/Cool Capability - Provides split-range control w ...
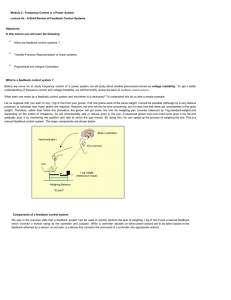
A Brief Review of Feedback Control Systems - CDEEP
... of actual values of gains (e.g. K, Ki, Kp), are chosen based on the satisfaction of certain specifications like maximum steady state error, stability, overshoot etc. For a detailed account of design issues, you may refer to any book on basic control systems (see, for example, Nagrath I J & Gopal M: ...
... of actual values of gains (e.g. K, Ki, Kp), are chosen based on the satisfaction of certain specifications like maximum steady state error, stability, overshoot etc. For a detailed account of design issues, you may refer to any book on basic control systems (see, for example, Nagrath I J & Gopal M: ...
chapter_1
... Continuous elastic structures (beams, shells, and plates) Fluid systems (ocean and atmosphere) Can often be approximately described with lumped models (FEM, AMM) Lumped System A System with a finite number of state variables Lumped parameter/ discrete system ...
... Continuous elastic structures (beams, shells, and plates) Fluid systems (ocean and atmosphere) Can often be approximately described with lumped models (FEM, AMM) Lumped System A System with a finite number of state variables Lumped parameter/ discrete system ...
Control theory

Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems with inputs, and how their behavior is modified by feedback. The usual objective of control theory is to control a system, often called the plant, so its output follows a desired control signal, called the reference, which may be a fixed or changing value. To do this a controller is designed, which monitors the output and compares it with the reference. The difference between actual and desired output, called the error signal, is applied as feedback to the input of the system, to bring the actual output closer to the reference. Some topics studied in control theory are stability (whether the output will converge to the reference value or oscillate about it), controllability and observability.Extensive use is usually made of a diagrammatic style known as the block diagram. The transfer function, also known as the system function or network function, is a mathematical representation of the relation between the input and output based on the differential equations describing the system.Although a major application of control theory is in control systems engineering, which deals with the design of process control systems for industry, other applications range far beyond this. As the general theory of feedback systems, control theory is useful wherever feedback occurs. A few examples are in physiology, electronics, climate modeling, machine design, ecosystems, navigation, neural networks, predator-prey interaction, gene expression, and production theory.