

Probability distributions
... • sweep(A, 1, v) returns a matrix where vector v has been subtracted from each of the columns of matrix A. • sweep(A, 2, v) returns a matrix where vector v has been subtracted from each of the rows of matrix A. • sweep(A, 1, v, FUN) returns a matrix where the ith column of A has been replaced by the ...
... • sweep(A, 1, v) returns a matrix where vector v has been subtracted from each of the columns of matrix A. • sweep(A, 2, v) returns a matrix where vector v has been subtracted from each of the rows of matrix A. • sweep(A, 1, v, FUN) returns a matrix where the ith column of A has been replaced by the ...


4 Solving Systems of Equations by Reducing Matrices
... As we observed before, this system can easily be solved using the method of substitution. Another more systematic method is that of reduction of matrices, the solution by a sequence of steps which can be carried out efficiently using matrices. Before explaining the method in detail, the idea behind ...
... As we observed before, this system can easily be solved using the method of substitution. Another more systematic method is that of reduction of matrices, the solution by a sequence of steps which can be carried out efficiently using matrices. Before explaining the method in detail, the idea behind ...

EXAMPLES OF NONNORMAL SEMINORMAL OPERATORS
... the subnormal operators as precisely the closure, in the strong operator topology, of the normal operators (see also Stampfli [lO]). In this note an example is given of a seminormal operator whose spectrum is not a spectral set (§3). This example motivates a construction which shows that every nonno ...
... the subnormal operators as precisely the closure, in the strong operator topology, of the normal operators (see also Stampfli [lO]). In this note an example is given of a seminormal operator whose spectrum is not a spectral set (§3). This example motivates a construction which shows that every nonno ...

Distributional Compositionality Intro to Distributional Semantics
... hotels . 1. God of the morning star 5. How does your garden , or meditations on the morning star . But we do , as a matte sing metaphors from the morning star , that the should be pla ilky Way appear and the morning star rising like a diamond be and told them that the morning star was up in the sky ...
... hotels . 1. God of the morning star 5. How does your garden , or meditations on the morning star . But we do , as a matte sing metaphors from the morning star , that the should be pla ilky Way appear and the morning star rising like a diamond be and told them that the morning star was up in the sky ...


Chapter 18. Introduction to Four Dimensions Linear algebra in four
... This formula is called Cramer’s formula and it applies to square matrices of any size. It generalizes the formula we used for inverses of 2 × 2 and 3 × 3 matrices. Cramer’s rule shows that A−1 exists if and only if det(A) 6= 0. Earlier, we have seen this is equivalent to ker A = {0}. Thus, the foll ...
... This formula is called Cramer’s formula and it applies to square matrices of any size. It generalizes the formula we used for inverses of 2 × 2 and 3 × 3 matrices. Cramer’s rule shows that A−1 exists if and only if det(A) 6= 0. Earlier, we have seen this is equivalent to ker A = {0}. Thus, the foll ...

Lesson 5.4 - james rahn
... On Friday, 3247 people attended the county fair. The entrance fee for an adult was $5 and for a child 12 and under the fee was $3. The fair collected $14,273. How many of the total attendees were adults and how many ...
... On Friday, 3247 people attended the county fair. The entrance fee for an adult was $5 and for a child 12 and under the fee was $3. The fair collected $14,273. How many of the total attendees were adults and how many ...

Math 601 Solutions to Homework 3
... side must all be 0. Thus, using the coefficients of the x, x2 , and x3 terms, we get that c1 = 0, c2 = 0, and c3 = 0. Thus, the polynomials 1+x, −1+x2 , and 1+x3 are linearly independent. We have shown that the polynomials 1 + x, −1 + x2 , and 1 + x3 span S and are linearly independent. Thus, they f ...
... side must all be 0. Thus, using the coefficients of the x, x2 , and x3 terms, we get that c1 = 0, c2 = 0, and c3 = 0. Thus, the polynomials 1+x, −1+x2 , and 1+x3 are linearly independent. We have shown that the polynomials 1 + x, −1 + x2 , and 1 + x3 span S and are linearly independent. Thus, they f ...


Vector Spaces and Linear Transformations
... If H is a subspace of V , then H is closed for the addition and scalar multiplication of V , i.e., for any u, v ∈ H and scalar c ∈ R, we have u + v ∈ H, cv ∈ H. For a nonempty set S of a vector space V , to verify whether S is a subspace of V , it is required to check (1) whether the addition and s ...
... If H is a subspace of V , then H is closed for the addition and scalar multiplication of V , i.e., for any u, v ∈ H and scalar c ∈ R, we have u + v ∈ H, cv ∈ H. For a nonempty set S of a vector space V , to verify whether S is a subspace of V , it is required to check (1) whether the addition and s ...

Unitary Matrices
... At this point one may apply and inductive hypothesis to conclude that A2 is similar to a diagonal matrix. Thus by the manner in which the full similarity was constructed, we see that A must also be similar to a diagonal matrix. Corollary 4.1.1. Let U ∈ Mn be unitary. Then (i) Then U has a set of n o ...
... At this point one may apply and inductive hypothesis to conclude that A2 is similar to a diagonal matrix. Thus by the manner in which the full similarity was constructed, we see that A must also be similar to a diagonal matrix. Corollary 4.1.1. Let U ∈ Mn be unitary. Then (i) Then U has a set of n o ...






Lecture 9, basis - Harvard Math Department
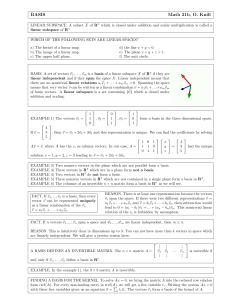
... BASIS. A set of vectors ~v1 , . . . , ~vm is a basis of a linear subspace X of Rn if they are linear independent and if they span the space X. Linear independent means that there are no nontrivial linear relations ai~v1 + . . . + am~vm = 0. Spanning the space means that very vector ~v can be written ...
... BASIS. A set of vectors ~v1 , . . . , ~vm is a basis of a linear subspace X of Rn if they are linear independent and if they span the space X. Linear independent means that there are no nontrivial linear relations ai~v1 + . . . + am~vm = 0. Spanning the space means that very vector ~v can be written ...

Math 018 Review Sheet v.3
... same as RC (in fact, the product CR will be an n × n matrix, not a number). Matrix × matrix: • Warning: The product of two matrices is not defined in the obvious way: i.e. you don’t just multiply corresponding entries together. • If A is an m × n matrix, and B is a p × q matrix, then the product AB ...
... same as RC (in fact, the product CR will be an n × n matrix, not a number). Matrix × matrix: • Warning: The product of two matrices is not defined in the obvious way: i.e. you don’t just multiply corresponding entries together. • If A is an m × n matrix, and B is a p × q matrix, then the product AB ...

Jordan normal form

In linear algebra, a Jordan normal form (often called Jordan canonical form)of a linear operator on a finite-dimensional vector space is an upper triangular matrix of a particular form called a Jordan matrix, representing the operator with respect to some basis. Such matrix has each non-zero off-diagonal entry equal to 1, immediately above the main diagonal (on the superdiagonal), and with identical diagonal entries to the left and below them. If the vector space is over a field K, then a basis with respect to which the matrix has the required form exists if and only if all eigenvalues of the matrix lie in K, or equivalently if the characteristic polynomial of the operator splits into linear factors over K. This condition is always satisfied if K is the field of complex numbers. The diagonal entries of the normal form are the eigenvalues of the operator, with the number of times each one occurs being given by its algebraic multiplicity.If the operator is originally given by a square matrix M, then its Jordan normal form is also called the Jordan normal form of M. Any square matrix has a Jordan normal form if the field of coefficients is extended to one containing all the eigenvalues of the matrix. In spite of its name, the normal form for a given M is not entirely unique, as it is a block diagonal matrix formed of Jordan blocks, the order of which is not fixed; it is conventional to group blocks for the same eigenvalue together, but no ordering is imposed among the eigenvalues, nor among the blocks for a given eigenvalue, although the latter could for instance be ordered by weakly decreasing size.The Jordan–Chevalley decomposition is particularly simple with respect to a basis for which the operator takes its Jordan normal form. The diagonal form for diagonalizable matrices, for instance normal matrices, is a special case of the Jordan normal form.The Jordan normal form is named after Camille Jordan.