
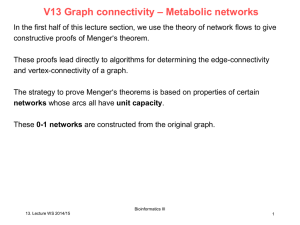
Decision Maths - Haringeymath's Blog
... Under the reflection the coordinate becomes (-2,1) You can probably notice that there is a general rule for all the co-ordinates. ...
... Under the reflection the coordinate becomes (-2,1) You can probably notice that there is a general rule for all the co-ordinates. ...

Tensor principal component analysis via sum-of
... where “=” denotes equality in the ring R[x]/(kxk2 − 1) and where s1 , . . . , sk have bounded degree, when such certificates exist. (The polynomials {si } and {t j } certify that h(x) 6 c. Otherwise c − h(x) would be negative, but this is impossible by the nonnegativity of squared polynomials.) Our ...
... where “=” denotes equality in the ring R[x]/(kxk2 − 1) and where s1 , . . . , sk have bounded degree, when such certificates exist. (The polynomials {si } and {t j } certify that h(x) 6 c. Otherwise c − h(x) would be negative, but this is impossible by the nonnegativity of squared polynomials.) Our ...

Topic 16 Notes 16 Eigenvalues, diagonalization, decoupling Jeremy Orloff
... 16 Eigenvalues, diagonalization, decoupling Proof of the diagonalization theorem. We will do this for the matrix in the example above. It will be clear that this proof carries over to any n × n matrix with n independent eigenvectors. We could check directly that the diagonalization equation holds. ...
... 16 Eigenvalues, diagonalization, decoupling Proof of the diagonalization theorem. We will do this for the matrix in the example above. It will be clear that this proof carries over to any n × n matrix with n independent eigenvectors. We could check directly that the diagonalization equation holds. ...


Fast structured matrix computations: tensor rank and Cohn Umans method
... Except for the case of skew-symmetric matrices, we obtain algorithms with optimum bilinear complexities for all structured matrix–vector products listed above. In particular we obtain the rank and border rank of the structure tensors in all cases but the last. A reader who follows the developments i ...
... Except for the case of skew-symmetric matrices, we obtain algorithms with optimum bilinear complexities for all structured matrix–vector products listed above. In particular we obtain the rank and border rank of the structure tensors in all cases but the last. A reader who follows the developments i ...


View
... count (possibly zero) and increment it. At the end, the dictionary contains pairs of letters and their frequencies. It might be more appealing to display the histogram in alphabetical order. We can do that with the items and sort methods: >>> letterItems = letterCounts.items() >>> letterItems.sort() ...
... count (possibly zero) and increment it. At the end, the dictionary contains pairs of letters and their frequencies. It might be more appealing to display the histogram in alphabetical order. We can do that with the items and sort methods: >>> letterItems = letterCounts.items() >>> letterItems.sort() ...
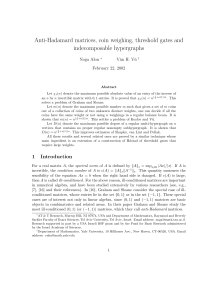
Anti-Hadamard matrices, coin weighing, threshold gates and
... D(n) is motivated by questions in Game Theory and has been considered by many ...
... D(n) is motivated by questions in Game Theory and has been considered by many ...

NON-SINGULAR FLOWS ON S3 WITH
... then |det(7 — B)\ equals the order of the group Hu(Mh Mi_x; Z) and det(Z — B) = 0 if and only if Hu(Mi9 Mi_x; Z) is infinite. Hence |det(J — B)\ is independent of the choice of structure matrix B. We thus obtain a slight variation of an invariant of Parry and Sullivan [8].(1.4) DEFINITION. The Parry ...
... then |det(7 — B)\ equals the order of the group Hu(Mh Mi_x; Z) and det(Z — B) = 0 if and only if Hu(Mi9 Mi_x; Z) is infinite. Hence |det(J — B)\ is independent of the choice of structure matrix B. We thus obtain a slight variation of an invariant of Parry and Sullivan [8].(1.4) DEFINITION. The Parry ...
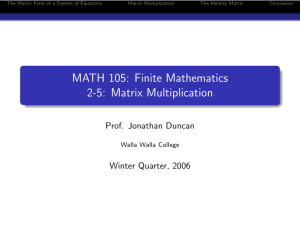
MATH 105: Finite Mathematics 2
... Matrix Multiplication If we know how to multiply a row vector by a column vector, we can use that to define matrix multiplication in general. Matrix Multiplication If A is an m × n matrix and B is an n × k matrix, then the produce AB is defined to be the m × k matrix whose entry in the ith row, jth ...
... Matrix Multiplication If we know how to multiply a row vector by a column vector, we can use that to define matrix multiplication in general. Matrix Multiplication If A is an m × n matrix and B is an n × k matrix, then the produce AB is defined to be the m × k matrix whose entry in the ith row, jth ...




Symmetric nonnegative realization of spectra
... Perfect in [15] to derive a sufficient condition for the RNIEP. Our goal in this paper is twofold: to obtain a symmetric version of Rado’s extension and, as a consequence of it, to obtain a new realizability criterion for the SNIEP. The paper is organized as follows: In section 2 we introduce some not ...
... Perfect in [15] to derive a sufficient condition for the RNIEP. Our goal in this paper is twofold: to obtain a symmetric version of Rado’s extension and, as a consequence of it, to obtain a new realizability criterion for the SNIEP. The paper is organized as follows: In section 2 we introduce some not ...
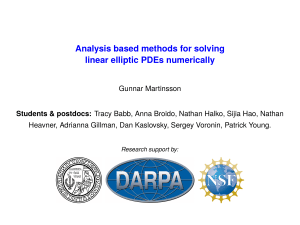
Analysis based methods for solving linear elliptic PDEs numerically
... • Minor modifications lead to a streaming algorithm that never stores A at all. • The flop count can be reduced from O(mnk) to O(mnlog k) by using a so called “fast Johnson-Lindenstrauss” transform. Speed gain of factor between 2 and 8 for matrices of size, e.g., 3000 × 3000. • Accuracy of the basic ...
... • Minor modifications lead to a streaming algorithm that never stores A at all. • The flop count can be reduced from O(mnk) to O(mnlog k) by using a so called “fast Johnson-Lindenstrauss” transform. Speed gain of factor between 2 and 8 for matrices of size, e.g., 3000 × 3000. • Accuracy of the basic ...

Gaussian elimination - Computer Science Department
... // Reduce rows 1..n-1 (use the pivot in previous row k) for (int k = 0; k < n - 1; ++k) { // Rows 0..k have already been reduced int imax = find_max_pivot(A, k); // finds the max pivot if (abs(A[imax][k]) < 1e-10) return false; // Singular matrix swap(A[k], A[imax]); swap(B[k], B[imax]); // Swap row ...
... // Reduce rows 1..n-1 (use the pivot in previous row k) for (int k = 0; k < n - 1; ++k) { // Rows 0..k have already been reduced int imax = find_max_pivot(A, k); // finds the max pivot if (abs(A[imax][k]) < 1e-10) return false; // Singular matrix swap(A[k], A[imax]); swap(B[k], B[imax]); // Swap row ...

An Alternative Approach to Elliptical Motion
... a skew symmetric matrix. Rotation matrices can be given by the Cayley formula without using trigonometric functions. The Cayley formula is an easy method but it doesn’t give the rotation angle directly ([18], [30], [31], [9] and, [32]). 4. Householder Transformation : The Householder transformation ...
... a skew symmetric matrix. Rotation matrices can be given by the Cayley formula without using trigonometric functions. The Cayley formula is an easy method but it doesn’t give the rotation angle directly ([18], [30], [31], [9] and, [32]). 4. Householder Transformation : The Householder transformation ...


Matrix functions preserving sets of generalized nonnegative matrices
... 2. Matrix functions preserving PFn. In this section, we completely characterize matrix functions preserving the set of real n × n eventually positive matrices, PFn. For n = 1, these functions are simply functions f which are holomorphic on an open set Ω ⊆ C containing the positive real axis and whic ...
... 2. Matrix functions preserving PFn. In this section, we completely characterize matrix functions preserving the set of real n × n eventually positive matrices, PFn. For n = 1, these functions are simply functions f which are holomorphic on an open set Ω ⊆ C containing the positive real axis and whic ...



SMOOTH ANALYSIS OF THE CONDITION NUMBER AND THE
... Nn be the random matrix whose entries are iid copies of x. Then there is a positive constant C (depending on B) such that for any t ≥ n−A we have P(sn (Nn ) ≤ t) ≤ Cn1/2 t. We again turn to the general model M + Nn . In [28], the present authors proved Theorem 2.4 ([28, Theorem 2.1]). Let x be a ran ...
... Nn be the random matrix whose entries are iid copies of x. Then there is a positive constant C (depending on B) such that for any t ≥ n−A we have P(sn (Nn ) ≤ t) ≤ Cn1/2 t. We again turn to the general model M + Nn . In [28], the present authors proved Theorem 2.4 ([28, Theorem 2.1]). Let x be a ran ...

Non-negative matrix factorization

NMF redirects here. For the bridge convention, see new minor forcing.Non-negative matrix factorization (NMF), also non-negative matrix approximation is a group of algorithms in multivariate analysis and linear algebra where a matrix V is factorized into (usually) two matrices W and H, with the property that all three matrices have no negative elements. This non-negativity makes the resulting matrices easier to inspect. Also, in applications such as processing of audio spectrograms non-negativity is inherent to the data being considered. Since the problem is not exactly solvable in general, it is commonly approximated numerically.NMF finds applications in such fields as computer vision, document clustering, chemometrics, audio signal processing and recommender systems.