

Postulates and Theorems, Geometry Honors
... a. To every pair of points there corresponds a unique positive number called the distance between the points. b. The points on a line can be matched with the real numbers so that the distance between any two points is the absolute value of the difference of their associated numbers. ...
... a. To every pair of points there corresponds a unique positive number called the distance between the points. b. The points on a line can be matched with the real numbers so that the distance between any two points is the absolute value of the difference of their associated numbers. ...

Unit 1 Corrective
... ____ 54. the set of all points outside an angle Match each vocabulary term with its definition. a. translation b. transformation c. rotation d. reflection e. position f. dimension g. image h. preimage ____ 55. a transformation across a line ____ 56. a change in the position, size, or shape of a figu ...
... ____ 54. the set of all points outside an angle Match each vocabulary term with its definition. a. translation b. transformation c. rotation d. reflection e. position f. dimension g. image h. preimage ____ 55. a transformation across a line ____ 56. a change in the position, size, or shape of a figu ...




doc
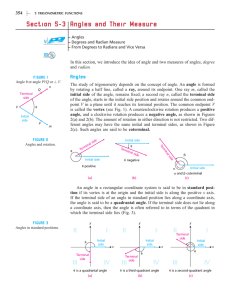
... superscript of –1 after the function abbreviation and enclosing the ratio value in parentheses, by adding the prefix arc- to the function name or abbreviation, or by just putting the word “inverse” before the function name. Thus “tan-1(1.5)”, “arctan(1.5)”, and “the inverse tangent of 1.5” all mean ...
... superscript of –1 after the function abbreviation and enclosing the ratio value in parentheses, by adding the prefix arc- to the function name or abbreviation, or by just putting the word “inverse” before the function name. Thus “tan-1(1.5)”, “arctan(1.5)”, and “the inverse tangent of 1.5” all mean ...







Pacing
... equations A.A.11 Solve a system of one linear and one quadratic equation in two variables, where only factoring is required. Note: The quadratic equation should represent a parabola and the solution(s) should be integers A.A.12 Multiply and divide monomial expressions with a common base using the pr ...
... equations A.A.11 Solve a system of one linear and one quadratic equation in two variables, where only factoring is required. Note: The quadratic equation should represent a parabola and the solution(s) should be integers A.A.12 Multiply and divide monomial expressions with a common base using the pr ...







Triangle Sum Theorem
... Farah works for an architectural firm that designs theme parks. Her current client wants a park with three distinct areas—one for rides, one for stage shows, and one for concessions. Each area must be triangular and identical in size and shape. These three triangular areas must touch without gaps or ...
... Farah works for an architectural firm that designs theme parks. Her current client wants a park with three distinct areas—one for rides, one for stage shows, and one for concessions. Each area must be triangular and identical in size and shape. These three triangular areas must touch without gaps or ...
Euler angles

The Euler angles are three angles introduced by Leonhard Euler to describe the orientation of a rigid body. To describe such an orientation in 3-dimensional Euclidean space three parameters are required. They can be given in several ways, Euler angles being one of them; see charts on SO(3) for others. Euler angles are also used to describe the orientation of a frame of reference (typically, a coordinate system or basis) relative to another. They are typically denoted as α, β, γ, or φ, θ, ψ.Euler angles represent a sequence of three elemental rotations, i.e. rotations about the axes of a coordinate system. For instance, a first rotation about z by an angle α, a second rotation about x by an angle β, and a last rotation again about z, by an angle γ. These rotations start from a known standard orientation. In physics, this standard initial orientation is typically represented by a motionless (fixed, global, or world) coordinate system; in linear algebra, by a standard basis.Any orientation can be achieved by composing three elemental rotations. The elemental rotations can either occur about the axes of the fixed coordinate system (extrinsic rotations) or about the axes of a rotating coordinate system, which is initially aligned with the fixed one, and modifies its orientation after each elemental rotation (intrinsic rotations). The rotating coordinate system may be imagined to be rigidly attached to a rigid body. In this case, it is sometimes called a local coordinate system. Without considering the possibility of using two different conventions for the definition of the rotation axes (intrinsic or extrinsic), there exist twelve possible sequences of rotation axes, divided in two groups: Proper Euler angles (z-x-z, x-y-x, y-z-y, z-y-z, x-z-x, y-x-y) Tait–Bryan angles (x-y-z, y-z-x, z-x-y, x-z-y, z-y-x, y-x-z). Tait–Bryan angles are also called Cardan angles; nautical angles; heading, elevation, and bank; or yaw, pitch, and roll. Sometimes, both kinds of sequences are called ""Euler angles"". In that case, the sequences of the first group are called proper or classic Euler angles.