
14-1 Mappings and Functions
... Triangle ABC has vertices A(2,4), B(0,6), and C(-2,2). Graph the figure and its reflected image over the x-axis. Then find the coordinates of the reflected image. B ...
... Triangle ABC has vertices A(2,4), B(0,6), and C(-2,2). Graph the figure and its reflected image over the x-axis. Then find the coordinates of the reflected image. B ...


F E I J G H L K
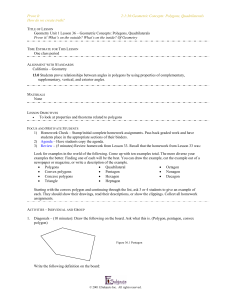
... 1. (24 pts—2 pts each) Fill in the blanks: a. Refer to figure 1. m(∠1) + m(∠2) + m(∠3) + m(∠4) + m(∠5) + m(∠6) = (6 − 2)180=720° Divide Polygon A into 4 triangles. The sum of the measure of the vertex angles of a triangle is 180° b. Refer to Figure 2. ∠ABD and ∠DBC are both acute angles; they are al ...
... 1. (24 pts—2 pts each) Fill in the blanks: a. Refer to figure 1. m(∠1) + m(∠2) + m(∠3) + m(∠4) + m(∠5) + m(∠6) = (6 − 2)180=720° Divide Polygon A into 4 triangles. The sum of the measure of the vertex angles of a triangle is 180° b. Refer to Figure 2. ∠ABD and ∠DBC are both acute angles; they are al ...


a + b - cloudfront.net
... Build the square AKMB, using hypotenuse AB as its side. Then continue sides of the rightangled triangle ABC so, to receive the square CDEF, the side length of which is equal to a + b . ...
... Build the square AKMB, using hypotenuse AB as its side. Then continue sides of the rightangled triangle ABC so, to receive the square CDEF, the side length of which is equal to a + b . ...


A Stronger Form of the Steiner-Lehmus Theorem - Heldermann
... theorem: Theorem 3 (Main Theorem) Let A′ be the foot of the internal angle-bisector of the angle BAC of a given triangle ABC. Consider P an arbitrary point on the ray AA′ , different from A′ , and denote by B ′ , C ′ the intersections of the lines BP , CP , with the sidelines CA, and AB, respectivel ...
... theorem: Theorem 3 (Main Theorem) Let A′ be the foot of the internal angle-bisector of the angle BAC of a given triangle ABC. Consider P an arbitrary point on the ray AA′ , different from A′ , and denote by B ′ , C ′ the intersections of the lines BP , CP , with the sidelines CA, and AB, respectivel ...
MCAS/Math Strategies Curriculum
... Write the equation of a line given one point on the line and the slope, using Point-Slope Form Write the equation of a line given two points, using Point-Slope form Translate between all forms of equations Define: positive slope, negative slope, zero slope and undefined (no) slope Classify the slope ...
... Write the equation of a line given one point on the line and the slope, using Point-Slope Form Write the equation of a line given two points, using Point-Slope form Translate between all forms of equations Define: positive slope, negative slope, zero slope and undefined (no) slope Classify the slope ...





Geometry Vocabulary
... of the ocean. No matter which way you look…all you see is water…forever. ...
... of the ocean. No matter which way you look…all you see is water…forever. ...

Document
... A corollary of a theorem is an additional theorem that can easily be derived from the original theorem. Once the theorem is known, the corollary should seem obvious. A corollary can be used as a reason in a proof, just like a theorem or postulate. ...
... A corollary of a theorem is an additional theorem that can easily be derived from the original theorem. Once the theorem is known, the corollary should seem obvious. A corollary can be used as a reason in a proof, just like a theorem or postulate. ...







Steinitz's theorem

In polyhedral combinatorics, a branch of mathematics, Steinitz's theorem is a characterization of the undirected graphs formed by the edges and vertices of three-dimensional convex polyhedra: they are exactly the (simple) 3-vertex-connected planar graphs (with at least four vertices). That is, every convex polyhedron forms a 3-connected planar graph, and every 3-connected planar graph can be represented as the graph of a convex polyhedron. For this reason, the 3-connected planar graphs are also known as polyhedral graphs. Steinitz's theorem is named after Ernst Steinitz, who submitted its first proof for publication in 1916. Branko Grünbaum has called this theorem “the most important and deepest known result on 3-polytopes.”The name ""Steinitz's theorem"" has also been applied to other results of Steinitz: the Steinitz exchange lemma implying that each basis of a vector space has the same number of vectors, the theorem that if the convex hull of a point set contains a unit sphere, then the convex hull of a finite subset of the point contains a smaller concentric sphere, and Steinitz's vectorial generalization of the Riemann series theorem on the rearrangements of conditionally convergent series.↑ ↑ 2.0 2.1 ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑