
MATH4530–Topology. PrelimI Solutions
... compact space under a continuous map is compact, it is compact. (8) Compact: The quotient map factors through a surjective map S 3 ∪ {(0, 0, 0)} → R2 / ∼. This map is not quotient map but it is still continuous (the restriction of a continuous map on a subspace is continuous). Since S 3 ∪ {(0, 0, 0) ...
... compact space under a continuous map is compact, it is compact. (8) Compact: The quotient map factors through a surjective map S 3 ∪ {(0, 0, 0)} → R2 / ∼. This map is not quotient map but it is still continuous (the restriction of a continuous map on a subspace is continuous). Since S 3 ∪ {(0, 0, 0) ...

seminar notes - Andrew.cmu.edu
... Let X = [0, 1][0,1] , the set of all funtions from [0, 1] to [0, 1] (with the usual topology on [0, 1] inherited from R). [0, 1] is compact by the Heine-Borel Theorem, so X is compact in the product topology by Tychonov’s Theorem. Define a sequence (fn )∞ n=1 in X by fn (x) = the nth digit in the bi ...
... Let X = [0, 1][0,1] , the set of all funtions from [0, 1] to [0, 1] (with the usual topology on [0, 1] inherited from R). [0, 1] is compact by the Heine-Borel Theorem, so X is compact in the product topology by Tychonov’s Theorem. Define a sequence (fn )∞ n=1 in X by fn (x) = the nth digit in the bi ...

Topology - SISSA People Personal Home Pages
... 4. Contraction principle Let (X, d) be a complete metric space. A function T : X 7→ X is said to be a contraction mapping if there is a constant q, 0 ≤ q < 1, such that d(T x, T y) ≤ q · d(x, y) for all x, y ∈ X. Theorem 4.1. Every contraction has a unique fixed point. The proof, based on the fact t ...
... 4. Contraction principle Let (X, d) be a complete metric space. A function T : X 7→ X is said to be a contraction mapping if there is a constant q, 0 ≤ q < 1, such that d(T x, T y) ≤ q · d(x, y) for all x, y ∈ X. Theorem 4.1. Every contraction has a unique fixed point. The proof, based on the fact t ...


Non-Euclidean Geometry
... •Cylindrical surface Euclidean theorems continue to hold. •Model of Riemann’s non Euclidean geometry: spherical surface. ...
... •Cylindrical surface Euclidean theorems continue to hold. •Model of Riemann’s non Euclidean geometry: spherical surface. ...
Surface Area and Volume of Spheres
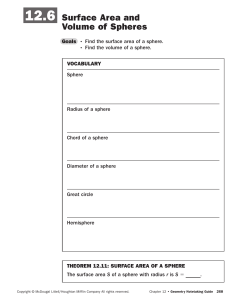
... Volume of Spheres Goals p Find the surface area of a sphere. p Find the volume of a sphere. VOCABULARY Sphere A sphere is the locus of points in space that are a given distance from a point. The point is called the center of the sphere. ...
... Volume of Spheres Goals p Find the surface area of a sphere. p Find the volume of a sphere. VOCABULARY Sphere A sphere is the locus of points in space that are a given distance from a point. The point is called the center of the sphere. ...





Lecture 2
... which will be of immense use in the sequel. Let g be the inverse of f and A be closed in X then g −1 (A) = f (A) is closed in Y from which continuity of g follows. Definition 2.2 (The Lebsesgue number for a cover): Given an open covering {G α } of a metric space X, a Lebesgue number for the covering ...
... which will be of immense use in the sequel. Let g be the inverse of f and A be closed in X then g −1 (A) = f (A) is closed in Y from which continuity of g follows. Definition 2.2 (The Lebsesgue number for a cover): Given an open covering {G α } of a metric space X, a Lebesgue number for the covering ...
the group exercise in class on Monday March 28
... Summary of the Exercise: Using a styrofoam ball and pieces of yarn of various lengths, we will explore the geometry of a sphere, the surface of a perfectly round ball, by experimenting with the properties of spherical lines and triangles. Note: "Sphere" refers only to the surface of the ball. All fi ...
... Summary of the Exercise: Using a styrofoam ball and pieces of yarn of various lengths, we will explore the geometry of a sphere, the surface of a perfectly round ball, by experimenting with the properties of spherical lines and triangles. Note: "Sphere" refers only to the surface of the ball. All fi ...


p. 1 Math 525 Notes on section 17 Isolated points In general, a point
... Note that A can be obtained by adding to A either its boundary points or its limit points, though the notions of boundary points and limit points are generally different. Convergence, and Hausdorff and T1 Spaces In a topological space (X, τ ), we say a countable sequence of points {xn } converges (o ...
... Note that A can be obtained by adding to A either its boundary points or its limit points, though the notions of boundary points and limit points are generally different. Convergence, and Hausdorff and T1 Spaces In a topological space (X, τ ), we say a countable sequence of points {xn } converges (o ...




USC3002 Picturing the World Through Mathematics
... Example Consider ( R , T ) where T is the usual topology whose members consists of unions of open balls. Then the following set is a subbasis for T S {( a, b) R : a, b R, a b} {R (a, b) : a, b R, a b} Proof B {( a, b) (c, d ) : a, b, c, d R, a b, c d } is equivalent to the ...
... Example Consider ( R , T ) where T is the usual topology whose members consists of unions of open balls. Then the following set is a subbasis for T S {( a, b) R : a, b R, a b} {R (a, b) : a, b R, a b} Proof B {( a, b) (c, d ) : a, b, c, d R, a b, c d } is equivalent to the ...

Algebraic Topology Introduction
... of the simplices and to make sure they intersect only when they should.” An abstract simplicial complex simplifies this issue. It is defined as a collection S of finite nonempty sets, such that if A ∈ S, so is every nonempty subset of A. A convenient way of expressing an abstract simplicial complex ...
... of the simplices and to make sure they intersect only when they should.” An abstract simplicial complex simplifies this issue. It is defined as a collection S of finite nonempty sets, such that if A ∈ S, so is every nonempty subset of A. A convenient way of expressing an abstract simplicial complex ...
Lecture 3. Submanifolds
... Heuristically, the idea is that if we take an oriented pair of vectors at some point (s, 0), and ‘slide’ them around the Möbius strip to (s + 1, 0), then if there were an oriented atlas it would have to be the case that the vectors obtained in this way were still oriented with respect to the origin ...
... Heuristically, the idea is that if we take an oriented pair of vectors at some point (s, 0), and ‘slide’ them around the Möbius strip to (s + 1, 0), then if there were an oriented atlas it would have to be the case that the vectors obtained in this way were still oriented with respect to the origin ...



Free full version - topo.auburn.edu
... n-spheres. Since the quotient maps p∞ i : X∞ → Xi separate points of X∞ , the limit of this sequence can be identified with X∞ . The maps pji : Xj → Xi have at most one non-trivial pointinverse. According to Corollary 1.4, they are near homeomorphisms. In virtue of Theorem 1.2, so is the map p∞ 0 : ...
... n-spheres. Since the quotient maps p∞ i : X∞ → Xi separate points of X∞ , the limit of this sequence can be identified with X∞ . The maps pji : Xj → Xi have at most one non-trivial pointinverse. According to Corollary 1.4, they are near homeomorphisms. In virtue of Theorem 1.2, so is the map p∞ 0 : ...