Physics Toolkit - Effingham County Schools
... In order for a bolt to be tightened, a torque of 45.0 N•m is needed. You use a 0.341 m long wrench, and you exert a maximum force of 189 N. What is the smallest angle, with respect to the wrench, at which you can exert this force and still tighten the bolt? ...
... In order for a bolt to be tightened, a torque of 45.0 N•m is needed. You use a 0.341 m long wrench, and you exert a maximum force of 189 N. What is the smallest angle, with respect to the wrench, at which you can exert this force and still tighten the bolt? ...


Force
... is meant by action and reaction forces. 2. State in your own words the formula for momentum. 3. What is a necessary condition for the conservation of momentum? 4. Explain how Newton’s third law of motion is at work when you walk. ...
... is meant by action and reaction forces. 2. State in your own words the formula for momentum. 3. What is a necessary condition for the conservation of momentum? 4. Explain how Newton’s third law of motion is at work when you walk. ...




Rotary Motion
... 7. Choose New Data Set from the Data menu. Enter your values for the hanging mass and angular acceleration for the stacked disks. As you did in Step 2, create a new calculated column finding the values of the net torque the hanging mass applied to the disks. 8. Plot a graph of net torque, , vs. ang ...
... 7. Choose New Data Set from the Data menu. Enter your values for the hanging mass and angular acceleration for the stacked disks. As you did in Step 2, create a new calculated column finding the values of the net torque the hanging mass applied to the disks. 8. Plot a graph of net torque, , vs. ang ...

Wizard Test Maker
... 42. Base your answer to the following question on the information and diagram below. A child is flying a kite, K. A student at point B, located 100. meters away from point A (directly underneath the kite), measures the angle of elevation of the kite from the ground as 30.°. ...
... 42. Base your answer to the following question on the information and diagram below. A child is flying a kite, K. A student at point B, located 100. meters away from point A (directly underneath the kite), measures the angle of elevation of the kite from the ground as 30.°. ...

CONSERVATION OF ENERGY
... the plunger and lead it over the pulley to a 50 gram mass holder. 5. Add 150 more grams to the mass holder, making a total of 200 grams. Read the centimeter scale reading at the left end of the cart and record it. 6. Add 200 grams to the load and again read and record the scale at the left end of th ...
... the plunger and lead it over the pulley to a 50 gram mass holder. 5. Add 150 more grams to the mass holder, making a total of 200 grams. Read the centimeter scale reading at the left end of the cart and record it. 6. Add 200 grams to the load and again read and record the scale at the left end of th ...

Packet 9: Mechanical Energy
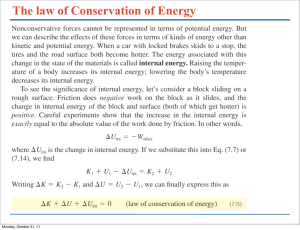
... stored in a variety of ways, but the energy itself is unchanged. Energy is universal and it does not come in different "kinds" or exist in different "forms." There are many mechanisms for energy storage. When something elastic is stretched, it has the potential do produce a change which we call Elas ...
... stored in a variety of ways, but the energy itself is unchanged. Energy is universal and it does not come in different "kinds" or exist in different "forms." There are many mechanisms for energy storage. When something elastic is stretched, it has the potential do produce a change which we call Elas ...


Introduction to Physical Science
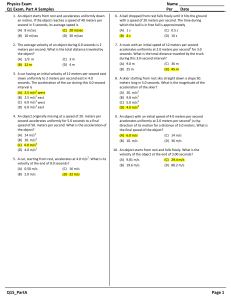
... 61) The length of a spring when it is not stretched 62) B – spring constant is twice as large 63) 0 J 64) 100 J 65) 62.5 J 66) 4.7 J 67) A – it is at the highest height 68) None – there is no spring that is stretched or compressed 69) B – it will be going the fastest because it is at the lowest poin ...
... 61) The length of a spring when it is not stretched 62) B – spring constant is twice as large 63) 0 J 64) 100 J 65) 62.5 J 66) 4.7 J 67) A – it is at the highest height 68) None – there is no spring that is stretched or compressed 69) B – it will be going the fastest because it is at the lowest poin ...

File
... string parallel to the board. Record also the pull that keeps the box sliding slowly and steadily (Fk). Do this several times and use the average. 2. Repeat same procedure with block on its side so that contacting surface will be smaller area. 3. Replaced 500-g mass with 1000-g mass and record neces ...
... string parallel to the board. Record also the pull that keeps the box sliding slowly and steadily (Fk). Do this several times and use the average. 2. Repeat same procedure with block on its side so that contacting surface will be smaller area. 3. Replaced 500-g mass with 1000-g mass and record neces ...



Shock and Acceleration Theory
... 5. Plot acceleration vs. time for one of your more interesting foam configurations. Note on the graph what is happening at critical points. 6. Using the information contained in your acceleration vs. time plots, calculate the maximum displacement of the foam for a few interesting examples. One way t ...
... 5. Plot acceleration vs. time for one of your more interesting foam configurations. Note on the graph what is happening at critical points. 6. Using the information contained in your acceleration vs. time plots, calculate the maximum displacement of the foam for a few interesting examples. One way t ...