

Ch15
... The twisted wire exerts a restoring torque on the object that is proportional to its angular position. ...
... The twisted wire exerts a restoring torque on the object that is proportional to its angular position. ...



Chapter 5 PPT
... When two or more objects are connected or in contact, Newton’s laws may be applied to the system as a whole and/or to each individual object Whichever you use to solve the problem, the other approach can be used as a check ...
... When two or more objects are connected or in contact, Newton’s laws may be applied to the system as a whole and/or to each individual object Whichever you use to solve the problem, the other approach can be used as a check ...


Solutions to Homework Set 9
... perpendicular to the page in each case. This is an overhead view, and we can neglect any effect of the force of gravity acting on the rod. Rank these four situations based on the magnitude of the rod's angular acceleration, from largest to smallest. Use only > and/or = signs in your rankings, such a ...
... perpendicular to the page in each case. This is an overhead view, and we can neglect any effect of the force of gravity acting on the rod. Rank these four situations based on the magnitude of the rod's angular acceleration, from largest to smallest. Use only > and/or = signs in your rankings, such a ...



Unit 2D: Laws of Motion
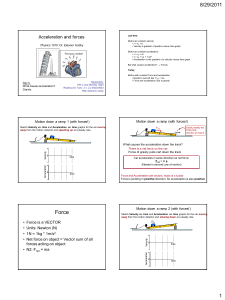
... First Law of Motion (Inertial Mass) An object remains at rest or moves with uniform velocity unless it is acted upon by an unbalanced force. [Hard to prove this on earth because of all the forces such as gravity, friction, etc. Closest thing is an airhockey table. Ex. This law holds true in space.] ...
... First Law of Motion (Inertial Mass) An object remains at rest or moves with uniform velocity unless it is acted upon by an unbalanced force. [Hard to prove this on earth because of all the forces such as gravity, friction, etc. Closest thing is an airhockey table. Ex. This law holds true in space.] ...


Phys_21_N7_WORK_and_ENERGY
... to begin data collection. Within the limits of the spring, move the Force Sensor and slowly stretch the spring about 50 cm over several seconds. Hold the sensor still until data collection stops. Do not get any closer than 40 cm to the Motion Detector 16. Examine the graphs. Identify when you starte ...
... to begin data collection. Within the limits of the spring, move the Force Sensor and slowly stretch the spring about 50 cm over several seconds. Hold the sensor still until data collection stops. Do not get any closer than 40 cm to the Motion Detector 16. Examine the graphs. Identify when you starte ...



Motion under gravity - The Open University
... cost, which is why we aim to publish as much free content as possible under an open licence. If it proves difficult to release content under our preferred Creative Commons licence (e.g. because we can't afford or gain the clearances or find suitable alternatives), we will still release the materials ...
... cost, which is why we aim to publish as much free content as possible under an open licence. If it proves difficult to release content under our preferred Creative Commons licence (e.g. because we can't afford or gain the clearances or find suitable alternatives), we will still release the materials ...





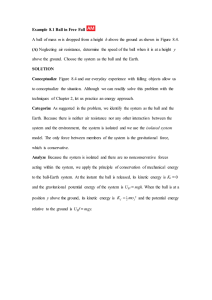
Example 8
... You are designing an apparatus to support an actor of mass 65.0 kg who is to “fly” down to the stage during the performance of a play. You attach the actor’s harness to a 130-kg sandbag by means of a lightweight steel cable running smoothly over two frictionless pulleys as in Figure 8.5a. You need ...
... You are designing an apparatus to support an actor of mass 65.0 kg who is to “fly” down to the stage during the performance of a play. You attach the actor’s harness to a 130-kg sandbag by means of a lightweight steel cable running smoothly over two frictionless pulleys as in Figure 8.5a. You need ...


3. Energy
... • apply laws of energy and momentum conservation in isolated systems; • apply the concept of work done by a constant force – work done = constant force × distance moved in direction of net force – work done = area under force-distance graph; • analyse transformations of energy between: kinetic energ ...
... • apply laws of energy and momentum conservation in isolated systems; • apply the concept of work done by a constant force – work done = constant force × distance moved in direction of net force – work done = area under force-distance graph; • analyse transformations of energy between: kinetic energ ...