Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
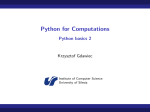
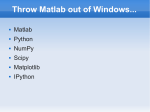
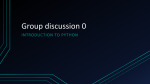
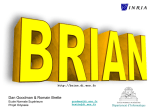
VISUALIZATION OF MODIS DATA IN THE BLENDER ENVIRONMENT: OR SCIENCE IN A BLENDER by Jonathan D. Wilson A senior thesis submitted to the faculty of Brigham Young University - Idaho in partial fulfillment of the requirements for the degree of Bachelor of Science Department of Physics Brigham Young University - Idaho July 2012 c 2012 Jonathan D. Wilson Copyright All Rights Reserved BRIGHAM YOUNG UNIVERSITY - IDAHO DEPARTMENT APPROVAL of a senior thesis submitted by Jonathan D. Wilson This thesis has been reviewed by the research committee, senior thesis coordinator, and department chair and has been found to be satisfactory. Date Todd Lines, Advisor Date David Oliphant, Senior Thesis Coordinator Date Kevin Kelley, Committee Member Date Stephen Turcotte, Chair ABSTRACT VISUALIZATION OF MODIS DATA IN THE BLENDER ENVIRONMENT: OR SCIENCE IN A BLENDER Jonathan D. Wilson Department of Physics Bachelor of Science Modis data files are visualized by way of Blender. Care is used to maintain the accuracy of the files data and geolocation information. The Modis teams georeferencing is used as the basis for locating the data within an x,y,z space. ACKNOWLEDGMENTS I would like to thank the advisors who have assisted me in the process of writing this thesis and the code for Blender. I would also like to thank Kyle for the insights during the editing process. I would also like to thank my family for their patience while I talked their ears off on this subject. Contents Table of Contents xi List of Figures xiii 1 Introduction 1.1 Visualization of large amounts of data . . . . . . . . . . . . . . . . . 1.2 Current methods of displaying satellite data . . . . . . . . . . . . . . 1.3 Why a new method? . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 2 2 4 2 History 2.1 Modis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Blender . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 HDF 4 and HDF 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 6 7 3 Procedures 9 4 Results 4.1 Analysis of h4toh5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Analysis of a Blender rendering of a sweep . . . . . . . . . . . . . . . 4.3 Theory of Data display . . . . . . . . . . . . . . . . . . . . . . . . . . 11 11 12 13 5 Conclusion 5.1 Did Blender work to a satisfactory level at displaying the data? . . . 5.2 Did Blender render in a satisfactory amount of time? . . . . . . . . . 5.3 Future Directions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 16 16 19 Bibliography 21 A Instructions for use A.1 Installation . . . . . . . . . . . . . . . . A.2 Use of Software . . . . . . . . . . . . . . A.3 Methods of interacting with the software A.4 Computer Specifications . . . . . . . . . 23 23 25 28 29 xi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xii CONTENTS B Python Code B.1 Version 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B.2 Version 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B.3 Version 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 33 40 47 List of Figures 4.1 4.2 File conversion times . . . . . . . . . . . . . . . . . . . . . . . . . . . An example of a rendered image . . . . . . . . . . . . . . . . . . . . . 12 13 5.1 5.2 5.3 5.4 An example of a rendered image An example of a rendered image Times for importing the MODIS Times for importing the MODIS . . . . . . . . . . . . . . . . . . . . . . file(first version) . file(third version) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 17 18 18 A.1 A.2 A.3 A.4 The first thing you see . . . . . Results from running the code . Highlighting how to change to a The contents of the editor types . . . . . . . . . . different menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 26 26 27 xiii . . . . . . view . . . . . . . . . . . . . . . Chapter 1 Introduction A challenge that exists is that of displaying information about a three-dimensional object onto a two-dimensional plane. A map is an example of this. Over the years there have been many developments that have tried to overcome the challenge of displaying information about the globe onto flat sheets. This has resulted in numerous types of maps to answer the call for greater accuracy of one aspect or other, or increase the ease of use. The venerable Cartesian coordinate system has been used with great success to show the relationship between two different sets of data. This does not work as well with multiple data sets being compared simultaneously. With computer technology we can start to explore the idea of creating a three-dimensional space that we can explore and interact with like the real world. This paper will discuss the methodology and philosophy behind using Blender [1] as a visualization program for scientific data sets. Blender is a 3-D(three-dimensional) animation tool that is open source. The benefits of using Blender are that it is free to use and easily modified to suit a particular purpose. This will be demonstrated through the specific application of Blender to MODIS [2] data sets taken from the 1 2 Chapter 1 Introduction Aqua [3] and Terra [4] satellites. In addition, the use of the software written to achieve this visualization will be discussed. 1.1 Visualization of large amounts of data A significant challenge of the era of satellite-based research is the task of extracting meaning from the vast amount of data that is gathered. One method is to automate the detection of events that are significant to the researchers involved. Another method is to provide a visual representation of the data in a manner that can be clearly seen; both the events that you are looking for, as well as understanding the context in which the event is found. The second method is the one that is necessary to research because this is the method that will aid in the communication of the ideas and evidences that are found to someone who is not intimately familiar with the conventions that are used for that satellite. This challenge has been faced in the past and this is where we get the Cartesian coordinate system. This was a method created to show the relationship between two separate quantities in a clear manner. As we go forward we are seeking meaning and relationships between larger data sets and larger numbers of quantities. There are now two-dimensional graphs that can include the relation between three or more quantities. Being able to represent data accurately within a 3-D space will increase the clarity of the relationships. 1.2 Current methods of displaying satellite data At this time there are several pieces of software that can be used to visualize the data in a satellite data product; ArcGIS [5], Erdas [6], ENVI [7] and Google Earth [8]. Ar- 1.2 Current methods of displaying satellite data 3 cgis, Erdas and Envi are predominately used to generate two-dimensional maps from the data for visualization purposes, although they are working to incorporate a threedimensional analysis into them. They are coming from a history of two-dimensional representation and trying to convert to a three-dimensional representation. This fundamental shift will require a great deal of work on their part. Since the data is three-dimensional, this leads to visual warping as a large enough data set is translated from a two-dimensional representation to a three-dimensional one. Google Earth is more appropriate for large volumes of data in terms of design because it is inherently three-dimensional and thus provides the data in a form that gives context, as well as including a way to tag data as coming from a certain time. Unfortunately Google Earth, at least the free edition, is not a good choice for large data sets due to its loading everything into memory, and thus, at a certain point, it exceeds its resources and crashes. Another limitation of Google Earth is that it does not have fine controls for the display of the time sensitive data, which is necessary for maintaining the time aspect. There are challenges when dealing with combining satellites’ data sets from the georeferencing. Satellite data sets do not use a uniform reference system for defining latitude and longitude. Modis data itself comes in various levels of processing. This project uses level 1A geolocation and level 1B data products which are georeferenced to the WGS84 Geoid [9] and contain the height relative to said geoid. Levels 2 and beyond use different coordinate systems that are more appropriate to the intended application. When trying to combine data sets there can be confusion from the differences that results in improperly aligned data due to the different methods of referencing. 4 Chapter 1 Introduction 1.3 Why a new method? There are several reasons a new method is needed to display information using Blender. Using open source software olves the issues created by evolving software. As future technology changes the methods are freely available to be updated. There is a great deal of effort expended on updating libraries that were programmed in Fortran and highly optimized. This project is itself built on this very idea. The NumPy [10] library is built on a collection of libraries that were programmed in the Fortran language and highly optimized. By using NumPy from within Python [11], I was able to decrease the amount of time it took to perform the longest section of code from 77 seconds to a fifth of a second. The next reason this method is needed is Blender is designed to make time series of three-dimensional objects and thus contains a large number of tools for working with those time-resolved data sets. All of the separate methods of georeferencing can also be coded to convert to a standard x,y,z coordinate system using whichever references are needed and the separate shapes can be included within the space. These make for an easy-to-use environment, bringing all of these data sets within and viewing them concurrently if desired. It is also possible in Blender to create multiple views of the different data sets that are all viewed from the same universal perspective over time. The final reason for using Blender is because it contains a number of functions that are for smoothing three-dimensional shapes and the coloring of them. These tools use in some fashion linear and non-linear extrapolation. If in the future someone could vet these functions they could be applied directly to the data. This final reason is partially addressed in section 4.3 where the future works are described. Chapter 2 History This project covers several different areas that would benefit from a bit of background for better context. Firstly, there is the sensor itself that flies on the Aqua and Terra satellites. Secondly, is the piece of software called Blender. Finally, there is the HDF file format. Each one of these elements brings something to the project that makes it possible for this to work together. The background for the satellite is complex and deserves a close reading of the the Algorithm Theoretical Basis Documents for the Level 1A geolocation and Level 1B data products [9] [12]. Blender is also complicated. However, it is more user-friendly and can be learned by trial and error [13]. HDF is used in this research as a black box that enables a unix-like directory access to the data. 2.1 Modis Modis has been flying on Aqua and Terra for a decade. These satellites are in sun synchronous flight at an altitude of 705 km. The Terra satellite is flying at 10:30 am and 10:30 pm local time descending and Aqua is flying at 1:30 pm and 1:30 am 5 6 Chapter 2 History local time ascending. The sensor sweeps out an area at the rate of 20.3 rotations per minute perpendicular to the orbit path. The swath that is viewed in a pass is approximately 2330 km (perpendicular to orbit) by 10 km (parallel to orbit). The data that comes from Modis [12] is processed and packaged into 10 minute slices of data. The level 1A geolocation set contains the latitude and longitude coordinates to the 1km resolution level. The level 1B contains the measured radiances of the instrument. The level 1B comes in three versions: the 250m contains the data from the sensors that have the highest resolution, the 500m contains the mid resolution data as well as a consolidated data from the 250m data set, and the 1km contains the lowest resolution data, as well as consolidated data from the 500m and 250m data. In addition there are several methods of georeferencing that are used by the different data products for the MODIS instrument. Data products that are labelled “swath” use WGS84. Other data products are labelled with “SIN” or “SIN Grid”, and they use as a reference a sphere, 6,371,007.181 m in radius. 2.2 Blender Blender started its life as an in-house tool to create 3-D animations for movies and other forms of entertainment. The tool was created in 1995 and since then was released as an open source tool. Coming from a field where all revenue is based on the ability to create compelling images and animations has lead to the refinement of processes to take an idea and visualize it. One of the latest refinements that has enabled this project was the inclusion of the Python language for scripting purposes and making most of the commands in the Blender software accessible from the Python script itself. Most of what the user can do in the Blender environment can be reproduced in a script in Python. This allows the rapid testing of methods in an environment de- 2.3 HDF 4 and HDF 5 7 signed to work with 3-D objects. Once a method is found that works, the conversion to a script to repeat the task over and over again is a simple process. Blender has decided to use Python version 3.x in it’s scripting. This choice has implications for using scientific Python packages because they are slowly being ported from version 2.x to version 3.x. For this project, this has prevented the use of PyHDF [14]. PyHDF is only compatible with Python version 2.x. This library would have allowed for the use of the HDF4 format, which is the native format for MODIS data, thus skipping the step of translating from HDF4 to HDF5. PyHDF has not released a new version since October of 2008, two months before Python 3.0 was first released. H5py [15] is Python 3.x compatible as well as NumPy and SciPy. Going forward, additional packages will become compatible which will expand the libraries that are available. 2.3 HDF 4 and HDF 5 HDF has seen twenty years of development and use in storing and distributing scientific data. Over the years it has grown to take into account more generic ideas. The change from HDF4 to HDF5 marks the addition of the ability to perform parallel IO. The HDF format allows for self-description, which for MODIS includes the measurements of the height, range, angle to the sun as well as descriptions of what range these values should have. Several aspects of HDF make it useful for Blender visualization. Because the data can be accessed in subsets the entirety of the file does not need to be loaded into memory. This has a large impact on performance in the pipeline. 8 Chapter 2 History Chapter 3 Procedures The procedure is to go to the website http://reverb.echo.nasa.gov/reverb/ and select the appropriate settings including; satellite, instrument, level of processing, time period and geographic location. With these selected, you will get a list of granules to download via ftp. With the files downloaded, convert the HDF4 files to HDF5 using h4toh5 [16]. Once the files are converted, set the path parameter in the script to point to the directory in which you have the files, as well as the file name parameter. Once the script has run, you can apply further effects from the Blender environment to smooth the object generated. You have the option to output the results as an image or video. Image output has the options for bmp, png, jpeg and tiff as well as other formats with settings for the file output contents. For the image, the recommended setting is to output in RGBA so that it includes the alpha channels, which is part of the generated object. Alpha channel is the information about the transparency of the object. Video output comes in a variety of formats as well, with avi, h.264, mpeg, ogg theora, and xvid. The settings for the video are rather complicated, and should be fine with the default settings. However, some of these settings will affect the render-time and the quality of the output visually. 9 10 Chapter 3 Procedures Chapter 4 Results The result of this research is a tool that can handle a known data format that is robust. Multiple satellite data sets can be used within the environment, so long as they use HDF4 or HDF5 format and the appropriate code is written to include it. The scripts included in Appendix B can be used as a template for the steps necessary to import the data and create an object. The system can be implemented and automated to generate video over specified sections of the earths surface, or to follow the satellite through its flight and give an accurate recreation of its view. The time that it takes for the rendering is good for use in a real-time rendering system. This process is not yet completed. There are additional steps that could be taken to improve the efficacy of the process. 4.1 Analysis of h4toh5 The tool h4toh5 used to convert the data files from the HDF4 format to HDF5 format worked wonderfully. The time it took to complete the conversion is within the desired time frame, with delays of under a minute for the size of files that MODIS produces. 11 12 Chapter 4 Results Figure 4.1 The time taken to convert is consistent with the size of the file and follows a linear trend. The conversion does alter the internal file structure in a consistent fashion. The alterations that the program h4toh5 introduce are relatively minor. The original data path is still intact and can be used with h5py to access the data. There are some artifacts that are generated but they can be ignored and will not affect the operation of the script at all. 4.2 Analysis of a Blender rendering of a sweep Blender takes a short time to render for the small data sets used. The length of time to render, and the accuracy of the render can be controlled intimately through several settings. This allows for the software to be configured to do either a fast, close to real time, or a slower more accurate view of the scene that is easier on the eyes. This greater control could become necessary as either the number of data sets imported increases or the resolution of data imported increases. See figure 4.2 to see what the default settings will give you for an image. 4.3 Theory of Data display 13 Figure 4.2 This is the resulting image when rendered. This is an early image where the lighting is not in place. The NumPy functions that handle the trigonometric functions do return differences in values based on the smallest possible change in the lattitude and longitude values. The color values range in Blender handles a range of 0.000000 to 1.000000 and thus will handle the conversion from an integer range of 0 to 32767 which is what the MODIS data is scaled to. 4.3 Theory of Data display The user is tempted to place within view all of the information that they have available. This temptation is best avoided due to the increased risk of misrepresenting what is actually there as others view the image. From Tufte and his work analyzing two-dimensional data representations, the conclusion can be drawn that a simple 14 Chapter 4 Results style is needed for this complex topic [17]. There is the concept of space, time, and intensity of light to all display in the same image. The animation helps to provide context for space and time through a smoothly changing reference frames. Limiting the displayed data to a single value for each point, instead of trying to put all of the frequencies measured into a single point, allows for the highest contrast of grayscale to be used. Additionally, there is error in the data and error ranges that should be conveyed at the same time so that a false view is not presented and accepted. In order to achieve this, a transparency layer is added to the data layer which will allow a third color to show through based on the error value. A small error will allow a small amount of the other color through the data object, while a large error will allow a large amount through and immediately lets the viewer know that there is something wrong in the data object. In order to display information about all of the frequencies, there needs to be a consistent function that is applied across the view. This can be seen in graphs where the axis are labeled in logarithmic scale. Tufte points out that if a graph has the axis abbreviated it can exaggerate the difference in the relationship. Data displayed in a three-dimensional space can have a similar problem because of the chosen view point. As an example, terrain data can be taken and -using a view that is just above the surface- will exaggerate the height differences. A good study of this would be optical illusions to find where the presentation method will break down. Chapter 5 Conclusion There is a great deal of potential in exploring Blender for the visualization of data. There are the smoothing functions and the subdivide functions that can potentially take a data set and estimate intermediate values for an entire space and present the results. In addition, the standardized three-dimensional space can be used to bring in disparate data sets for display over each other. With the standardized file format access there is the very real possibility that Blender can perform visualization for a large number of different projects. A super computer can handle the heavy lifting of the simulating and a script can be written to view the data quickly and easily from multiple angles over time. In addition, the data can be rendered quickly by only pulling the data that is to be viewed at a certain angle and time. 15 16 Chapter 5 Conclusion 5.1 Did Blender work to a satisfactory level at displaying the data? Blender did do a good job at visualizing the data. There are some aspects that did not work out as anticipated. The biggest drawback being that currently Alpha layer information is not used at the vertex level, but at a face level which makes for difficulty in displaying the error as proposed earlier in this paper. That can be overcome mostly by taking the vertex errors and blending them to generate a face alpha quantity. This is by no means perfect, and there is the chance that in the future the vertex alpha may be implemented. This should only be a problem for data that has large amounts of space between the data points. There is a need for a visual reference to anchor where people think they are when viewing the videos or pictures. This will be the subject of further research and development. At the time of writing, the image produced will be based on where you have moved the camera to view. The figures 5.1 and 5.2 are results from renderings of a file. These files are a 5 km subsampling of an entire granule of 1 km data from the MODIS instrument. 5.2 Did Blender render in a satisfactory amount of time? The time that it took Blender to import the data was a bottle neck to the process. In these graphs the script’s major actions were benchmarked. Step 1 is where the latitude and longitude are read in and converted from WGS84 to x,y,z coordinate triplets. Step 2 is generating the face list using a “for” loop. Step 3 is generating the object and linking it to the scene. Step 4 is generating the material and adding 5.2 Did Blender render in a satisfactory amount of time? 17 Figure 5.1 Produced from file MYD02SSH.A2012001.0840.005.2012001181210.2.h5. This is the red channel taken at night. Figure 5.2 Produced from file MYD02SSH.A2012001.1945.005.2012002174518.1.h5. This is the red channel taken during the day. 18 Chapter 5 Conclusion Figure 5.3 The time taken to import the file and set up the environment is dominated by the first step. Figure 5.4 The time taken to import the file and set up the environment is now dominated by the painting of vertices with the data. 5.3 Future Directions 19 the vertex paint layer to the object. Step 5 is reading in the data from the HDF file. Step 6 is checking for error codes in the data. (The data has a range of values from 0 to 32767 with values higher than this indicating errors in the data which must be handled.) Step 7 is painting the vertices with the data done with a “for” loop. As can be seen from the graphs, the time taken for importing the data can be decreased significantly. Version 0 did not use the NumPy libraries trigonometric routines while Version 2 did. Steps 3 and 4 are built-in functions that will not be able to be sped up with changes to the script. The rest of the steps can be improved in the future in regards to time and features. For the rendering to an image, once the data is imported to Blender, the time taken is three to five seconds. I have not had the chance to benchmark this part thoroughly, because the render time was previously a fraction of the time spent. With the improvements to import time, render time has again become a consideration for whether or not this is a good process for realtime rendering. Better hardware for rendering would speed this step immensely. Video rendering has not yet been tested, but should be a nearly linear extrapolation from the time it takes to render a single image. 5.3 Future Directions In the future, Blender could automatically take in data and render from the cues in the HDF file. A standardized set of formats for the marking up within the HDF file will allow parameters to be passed in from an external program. Gaining an understanding of how some of the smoothing functions work so that, if some of our standard data-fitting routines are already programmed in, we can use them with a single command to process large sets of data. Finally, there is the challenge of 20 Chapter 5 Conclusion integrating several data sources either through a layer approach within Blender, or in the Python script before it renders. There is also the pursuit of efficiency in the pipeline, so that it can handle the large amounts of data that are out there. The amount of data that is imported could be limited by knowing what will be viewed which would use less memory and less rendering time. Improvements are possible in the coding for Python. Additionally the rendering could be split up among different segments and stitched together afterwards to provide either different views for the same time frame, or to render many overlapping time-frames, or view information in different wavelengths simultaneously. Bibliography [1] Blender http://www.blender.org/ (Accessed July 16, 2012). [2] Brandon Maccharone, Shannell Frazier, Modis Website http://modis.gsfc.nasa. gov/index.php (Accessed July 16, 2012). [3] Steven Graham, Claire Parkinson, Aqua Project Science http://aqua.nasa.gov/ (Accessed July 16, 2012). [4] Holly Zell, Brian Dunbar, NASA - Terra http://www.nasa.gov/mission pages/ terra/index.html [5] Esri Inc., ArcGIS [Software], http://www.esri.com/software/arcgis [6] Erdas Inc., Erdas Imagine [Software], http://geospatial.intergraph.com/ products/ERDASIMAGINE/ERDASIMAGINE/Details.aspx [7] Exelis Visual Information Solutions Inc., ENVI [Software], http://www.exelisvis. com/ProductsServices/ENVI.aspx [8] Google Inc., Google Earth [Software], http://www.google.com/earth/index.html [9] Nishihama, R. Wolfe, D. Solomon, F. Patt, J Blanchette, A. Fleig, and E. Masuoka, MODIS Level 1A earth location: Algorithm Theoretical Basis Document , 21 22 BIBLIOGRAPHY Version 3.0 (Report SDST-092, Laboratory for Terrestrial Physics, NASA Goddard Space Flight Center, Greenbelt, MD, USA, 1997). [10] D. Ascher et al., Numerical Python, tech. report UCRL-MA-128569, Lawrence Livermore National Laboratory, 2001; http://numpy.scipy.org. [11] G. van Rossum and F. L. Drake(eds), Python Reference Manual, (Python Software Foundation, 2006), http://docs.python.org/ref/ref.html. [12] J. Xiong, G. Toller, V. Chiang, J. Sun, J. Esposito, and W. Barnes, MODIS Level 1B Algorithm Theoretical Basis Document , Version 3.0 (Prepared for: National Aeronautics and Space Administration) [13] J. v. Gumster, Blender for Dummies, 2nd ed. (Wiley, Indianapolis, 2011). [14] Andre Gosselin, PyHDF, 2008 (http://pysclint.sourceforge.net/ pyhdf/)(Accessed July 16, 2012). [15] A. Collette, HDF5 for Python, 2008 (http://h5py.alfven.org)(Accessed July 10, 2012) [16] H4toH5 Conversion Library API Reference Manual with H4/H5 Command-line Conversion Utilities , Release 2.2.1 (The HDF Group, 2012 http://www. hdfgroup.org/ftp/HDF5/tools/h4toh5/src/unpacked/doc/h4toh5lib RM.pdf) (Accessed July 16, 2012). [17] E. R. Tufte, The Visual Display of Quantitative Information (Graphics Press, Cheshire, 1983). [18] Blender 2.6 Python API Documentation http://www.blender.org/ documentation/blender python api 2 63 5/ (Accessed July 10, 2012). Appendix A Instructions for use The procedures outlined here include a list of the packages used in this work, as well as a step-by-step set of instructions for installing the Python packages. In addition, the scripts for Blender will also be described. Finally, the basic methods of interacting will be described. A.1 Installation The following is a step-by-step set of instructions for the installation of the software libraries that will be used. All of the commands to be entered at the command line are surrounded by double quotes. 1. Install Blender, libatlas-dev, libhdf5-serial-dev, libhdf5-serial-1.8.4, libblas-dev, libblas3gf, liblapack3gf, liblapack-dev and gfortran from your distributions repositories. 2. Download the source code for NumPy and h5py from http://sourceforge.net/ projects/numpy/files/NumPy/ and http://code.google.com/p/h5py/downloads/ list 23 24 Chapter A Instructions for use 3. Unzip the source code packages. 4. Open the terminal and change to the directory you unzipped NumPy to. 5. From the command line run “python3.2mu setup.py build –fcompiler=gnu95”. 6. After the code has compiled, this will take a while if succesful for the first time, then run “sudo python3.2mu setup.py install”. 7. From the command line run “find /usr -name numpy”. This will tell you where your software is installed. Take note of the directory structure before the first occurence of NumPy. This will be used later. An example of the output is /usr/local/lib/python3.2/dist-packages/numpy /usr/local/lib/python3.2/dist-packages/numpy/core/include/numpy /usr/local/lib/python3.2/dist-packages/numpy/numarray/include/numpy 8. Move to the directory in which you unzipped h5py and run “python3.2mu setup.py build”. 9. Run “sudo python3.2mu setup.py install”. 10. Run “find /usr -name h5py” to double check that h5py is installed in the same directory. Installation will use the standard Blender install. In linux either use a package manager to install Blender or go to the website www.blender.org to obtain the latest stable package. In addition, you will need to install libatlas-dev, libhdf5-serialdev, libhdf5-serial-1.8.4, libblas-dev, libblas3gf, liblapack3gf, liblapack-dev, as well as gfortran. The directions at http://www.scipy.org/Installing SciPy/Linux should be followed with one exception. The reason for this change is that Blender uses Python 3 with wide unicode support which is not the standard settings. A.2 Use of Software 25 Figure A.1 When you first start Blender this is the starting view. In order to find out where Python is searching for the libraries open Blender. Select the Python console from the editor menu. This menu is found in the lower left of the work space and is one of these images based on the editing mode for the window. From the drop down menu select the Python console. In the console type in “import sys” and then “sys.path”. This will list off the different directories in which Blender’s Python is looking for libraries. The default directory is set by the system. You can either append onto the sys.path the directory where your libraries are stored or move the libraries into one of the searched directories. If you choose to leave them in the default location then you will need to set the path in the script. Any changes made to the sys.path variable are lost when Blender is closed and reopened. A.2 Use of Software Once the program, scripts and libraries are installed you can use them from within Blender by supplying the script with a list of files. You will also need to give it a location to track for the rendering. For this you will need to specify a position in 26 Chapter A Instructions for use Figure A.2 After the code you will see the object colored if you switch to vertex paint mode in the object viewing area. Figure A.3 By selecting the image in the bottom left of a window you can change the view A.2 Use of Software Figure A.4 The ones in use for this are the Python console, Text editor and the 3-D view. 27 28 Chapter A Instructions for use space by giving it a latitude and longitude coordinates and a height above the geoid in WGS84. In addition, you need to supply the viewing parameters for the camera. Once these are set, run the script and it will generate a video file. There will be several options for control of the camera once the script is set up. There is the possibility of the video following the satellite’s track or to remain located above a certain location for the duration of the video. There will also be settings for the amount of time that is rendered. The data file contains the data for ten minutes of flight time and the video could recreate faithfully the time that it takes to view, or it could generate a time lapse at a set rate. A.3 Methods of interacting with the software At this time, the methods of interacting with the code is by settings within the script file itself. This is a little ungainly and ultimately the program should be accessible by command-line interface. That has not been worked out just yet. There are some challenges to interfacing that have not been addressed. When a Python script is run in Blender, it does lock out the other controls as intended [18]. There are methods of updating in the middle of a script so that the process can be viewed. However, it is not recommended by the documentation. It would be preferable to run this script without the user interface running to preserve more system resources for the rendering itself, and because this will be repetitive and should be left to a machine to crank through. For more information look, in the section “Gotcha’s” in Blender’s Python api documentation. A.4 Computer Specifications A.4 29 Computer Specifications A set of tables containing hardware descriptions of the computer on which all of the timing tests were performed. A table of the software packages as listed in the software repositories is also included here. Table A.1 Cpu Brand AMD Name Athlon II X2 260 Model ADX260OCGMBOX Core Regor Multi-Core Dual-Core Operating Frequency 3.2GHz Hyper Transports 4000MHz L1 Cache 2 x 128KB L2 Cache 2 x 1MB Manufacturing Tech 45 nm 64 bit Support Yes Hyper-Transport Support Yes 30 Chapter A Instructions for use Table A.2 Harddrive Brand Seagate Series Barracuda Green Model ST1500DL003 Interface SATA 6.0Gb/s RPM 5900 RPM Cache 64MB Average Seek Time 12ms Average Write Time 13ms Average Latency 4.16ms Table A.3 Graphics Card Brand ZOTAC Model ZT-40704-10L Interface PCI Express 2.0 x16 Chipset Manufacturer NVIDIA GPU GeForce GT 440 (Fermi) Core Clock 810MHz Shader Clock 1620MHz CUDA Cores 96 Effective Memory Clock 1600MHz Memory Size 1GB Memory Interface 128-bit Memory Type GDDR3 3-D API DirectX, DirectX 11, OpenGL, OpenGL 4.1 Features NVIDIA PhysX , NVIDIA CUDA A.4 Computer Specifications 31 Table A.4 Memory Brand CORSAIR Series Vengeance Model CML16GX3M4A1600C9B Type 240-Pin DDR3 SDRAM Capacity 16GB (4 x 4GB) Speed DDR3 1600 (PC3 12800) Cas Latency 9 Timing 9-9-9-24 Multi-channel Kit Dual Channel Kit Table A.5 Software Package Version Ubuntu 11.10(12.04) Blender 2.58-svn37702-1ubuntu1 libblas3gf 1.2.20110419-2ubuntu1 libblas-dev 1.2.20110419-2ubuntu1 libatlas-dev 3.8.4-3build1 liblapack3gf 3.3.1-1 liblapack-dev 3.3.1-1 libhdf5-serial-dev 1.8.4-patch1-2ubuntu4 libhdf5-serial-1.8.4 1.8.4-patch1-2ubuntu4 gfortran 4:4.6.1-2ubuntu5 32 Chapter A Instructions for use Appendix B Python Code B.1 1 Version 2 #Libraries used 2 3 import bpy 4 import sys 5 6 #The following string is used to indicate where the library packages are stored 7 # change to match the location on your system This is necessary to find numpy 8 # and h5py if the libraries are already in one of the searched directories then 9 # comment out this section of code. 10 11 systemPath = ’/usr/local/lib/python3.2/dist-packages’ 12 13 #The following checks against each element of the system path list and if the 33 34 Chapter B Python Code 14 # variable systemPath is not found adds it. This could break if your sys.path 15 # variable contains elements that are not strings. 16 # is something to check. If the code breaks this 17 18 if [s for s in sys.path if systemPath in s] == []: sys.path.append(systemPath) 19 20 21 # 22 import numpy 23 import h5py 24 25 #Configuration values 26 27 #Name is the name of the hdf file and the path is the location to it. 28 #In the case of the MYD02SSH you can use the internal latitude and longitude 29 # coordinates because they map one to one. 30 # 1km resolution does not include the one to one coordinate points to data 31 # points therefore you need to include an additional data file that contains 32 # those. Which is where name2 comes from. The other data set that is the 33 34 name = ’MYD02SSH.A2012001.1945.005.2012002174518.1.h5’ 35 #name2 = ’MYD03.A2012001.1945.005.2012002170952.1.h5’ 36 37 #ShortName is to get around the name size limitation in Blender. 38 #Otherwise I would use the name of the file. 39 # will take longer names up to 63 characters in length. The newer version of Blender So this will be B.1 Version 2 35 40 # phased out in later versions but will necessitate using Blender 2.62 41 # and up. 42 ShortName = ’First’ 43 path = ’’ 44 45 #These are the dimensions of the data set. This data does exist within the 46 # data file itself but I have not taken the time to learn how to access that 47 # specific attribute yet. 48 # recognized because it has nested attributes. 49 # be found using HDFView and entered here. 50 # faces which is one row and column less and referenced so often that it makes 51 # more sense to compute once and reference. 52 n = 406 53 n2 = n-1 54 m = 271 55 m2 = m-1 This might be because the hdf-eos extension is not Either way these values can n2 and m2 is the shape of the 56 57 #Creating the file handle 58 H5File = h5py.File(path+name,’r’) 59 #H5File2 = h5py.File(path+name2,’r’) 60 61 #these are the list objects where the data for the mesh frame will be stored 62 vertex_list = [] 63 face_list = [] 64 65 #This block of code computes the x,y,z coordinates from the latitude and 36 Chapter B Python Code 66 # longitude included in the hdf file Numpy makes this much faster. The dtype 67 # is included to make the accuracy achieved match my previous method of using 68 # the math package and a for loop. 69 # then that can be removed for a speed increase of three times for this 70 # section. If this level of accuracy is unnecessary 71 72 a = 6.378137 #This is the semi major axisreference datum for wgs 84 73 b = 6.356752314245 #This is the semi minor axis 74 p = ((numpy.array(H5File[’MODIS_SWATH_Type_L1B’][’Geolocation Fields’] [’Latitude’],dtype=float)*numpy.pi)/180) 75 76 r = numpy.sqrt(1/((numpy.square(numpy.sin(p))/(a*a)) 77 +(numpy.square(numpy.cos(p))/(b*b)))) 78 t = ((numpy.array(H5File[’MODIS_SWATH_Type_L1B’][’Geolocation Fields’] [’Longitude’],dtype=float)*numpy.pi)/180) 79 80 x = numpy.multiply(numpy.multiply(r,numpy.sin(p)),numpy.cos(t)) 81 y = numpy.multiply(numpy.multiply(r,numpy.sin(p)),numpy.sin(t)) 82 z = numpy.multiply(r,numpy.cos(p)) 83 vertex_list = zip(x.flatten().tolist(),y.flatten().tolist(), 84 z.flatten().tolist()) 85 86 #This section could also be sped up a bit with some work. 87 #The face list is a set of four numbers that are indexes into the list of 88 # vertex points and should be in the order of upper left, lower left, 89 # lower right, and upper right. 90 # norm of the face facing. 91 for i in range(0,n2): I don’t know which direction this puts the B.1 Version 2 92 93 37 for j in range(0,m2): face_list.append(((i*m+j),(i*m+j+m),(i*m+j+m+1),(i*m+j+1))) 94 95 #Generate the mesh object and link with the object 96 me = bpy.data.meshes.new(ShortName+’Mesh’) 97 ob = bpy.data.objects.new(ShortName, me) 98 ob.location = (0,0,0) 99 ob.show_name = True 100 # Link object to scene 101 bpy.context.scene.objects.link(ob) 102 103 # Create mesh from given verts, edges, faces. Either edges or 104 # faces should be [], or you ask for problems 105 me.from_pydata(list(vertex_list), [], face_list) 106 107 # Update mesh with new data 108 me.update(calc_edges=True) 109 110 #The following generates a new material if there is none available 111 if len(bpy.data.materials.keys())<1: 112 bpy.ops.material.new() 113 114 #Takes the name of the first material 115 MaterialName = bpy.data.materials.keys()[0] 116 117 #This next line sets the active object to the one we just created, necessary 38 Chapter B Python Code 118 # for the ops commands to work 119 bpy.context.scene.objects.active = ob 120 121 #Add a new material slot to the active object 122 bpy.ops.object.material_slot_add() 123 124 #Set the Material for the object to the first one 125 ob.material_slots[’’].material = bpy.data.materials[MaterialName] 126 127 #Set the first material to use Vertex color painting 128 bpy.data.materials[MaterialName].use_vertex_color_paint = True 129 130 #Finally generate the data structure that stores the vertex paint information 131 bpy.data.objects[ShortName].data.vertex_colors.new() 132 133 #Take in the information about the recorded radiances and scale to between 0 134 # and 1 This is also where you can set what channel to use 135 Edata1 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’][’EV_1KM_RefSB’][7] 136 137 138 139 140 /32767) Edata2 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’][’EV_1KM_RefSB’][3] /32767) Edata3 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’] [’EV_500_Aggr1km_RefSB’][0]/32767) 141 142 #This for loop structure is to make sure that the elements are between 0 and 1 143 # because outside of that indicates error, for now I am zeroing the data for B.1 Version 2 39 144 # testing purposes. 145 for i in range(0,n): 146 This will need to be addressed in greater depth later. for j in range(0,m): 147 if Edata1[i][j] > 1: 148 Edata1[i][j] = 0 149 if Edata2[i][j] > 1: 150 Edata2[i][j] = 0 151 if Edata3[i][j] > 1: 152 Edata3[i][j] = 0 153 154 155 for i in range(0,n2): for j in range(0,m2): 156 index = i*m2+j 157 ob.data.vertex_colors[’Col’].data[index].color1 = (Edata1[i][j], 158 Edata2[i][j], 159 Edata3[i][j]) 160 ob.data.vertex_colors[’Col’].data[index].color2 = (Edata1[i+1][j], 161 Edata2[i+1][j], 162 Edata3[i+1][j]) 163 ob.data.vertex_colors[’Col’].data[index].color3 = (Edata1[i+1][j+1], 164 Edata2[i+1][j+1], 165 Edata3[i+1][j+1]) 166 ob.data.vertex_colors[’Col’].data[index].color4 = (Edata1[i][j+1], 167 Edata2[i][j+1], 168 Edata3[i][j+1]) 40 B.2 1 Chapter B Python Code Version 1 #Libraries used 2 3 import bpy 4 import math 5 import sys 6 import time 7 8 #The following string is used to indicate where the library packages are stored 9 # change to match the location on your system This is necessary to find numpy 10 # and h5py if the libraries are already in one of the searched directories then 11 # comment it out 12 13 sys.path.append(’/usr/local/lib/python3.2/dist-packages’) 14 15 import numpy 16 import h5py 17 18 #Internal functions 19 20 #WGS84toXYZ takes in the latitude and longitude in terms of degrees with 21 # latitude and longitude and computes the x,y,z coordinates for them based on 22 # the WGS84 Geoide. 23 # system. 24 def WGS84toXYZ(phi,theta): This does not account for any rotation of the coordinate B.2 Version 1 41 25 a = 6.378137 #This is the semi major axisreference datum for wgs 84 26 b = 6.356752314245 #This is the semi minor axis 27 p = (phi*numpy.pi)/180 28 r = math.sqrt(1/((numpy.sin(p)*numpy.sin(p)/(a*a))+((numpy.cos(p)* numpy.cos(p))/(b*b)))) 29 30 t = ((theta)*math.pi)/180 31 x = r*numpy.sin(p)*numpy.cos(t) 32 y = r*numpy.sin(p)*numpy.sin(t) 33 z = r*numpy.cos(p) 34 return x,y,z 35 36 #This function takes in the latitude and longitude and computes the x,y,z 37 # coordinate for them based on the Sinusoidal projection system used by some 38 # MODIS gridded data products 39 def MODISSINtoXYZ(phi,theta): 40 r = 6.371007181 41 p = (phi*math.pi)/180 42 x = r*math.sin(p)*math.cos(t) 43 y = r*math.sin(p)*math.sin(t) 44 z = r*math.cos(p) 45 return x,y,z 46 47 #Configuration values 48 49 #Name is the name of the hdf file and the path is the location to it. 50 name = ’MYD02SSH.A2012001.1945.005.2012002174518.1.h5’ 42 Chapter B Python Code 51 #name2 = ’MYD03.A2012001.1945.005.2012002170952.1.h5’ 52 ShortName = ’First’ 53 path = ’’ 54 #These are the dimensions of the data set. 55 # data file itself but I have not taken the time to learn how to access that 56 # specific attribute yet. 57 # recognized because it has nested attributes. 58 # be found using HDFView and entered here. 59 # that it makes more sense to compute once and reference. 60 n = 406 61 n2 = n-1 62 m = 271 63 m2 = m-1 This data does exist within the This might be because the hdf-eos extension is not Either way these values can n2 and m2 are referenced so often 64 65 66 #for profiling the for loops to see where the most time is spent is handled 67 # through time.clock and written to file every time it is run. 68 Time = open(’time’,’at’) 69 Time.write(’This is the time for a run of ’+name+’\n’) 70 Time1 = 0 71 Time2 = 0 72 73 #Creating the file handle 74 H5File = h5py.File(path+name,’r’) 75 #H5File2 = h5py.File(path+name2,’r’) 76 B.2 Version 1 43 77 #These are the list objects where the data for the mesh frame will be stored 78 vertex_list = [] 79 face_list = [] 80 81 #Take the time before starting the loop 82 Time1 = time.clock() 83 84 85 86 for i in range(0,n): for j in range(0,m): vertex_list.append(WGS84toXYZ( 87 H5File[’MODIS_SWATH_Type_L1B’][’Geolocation Fields’][’Latitude’][i][j], 88 H5File[’MODIS_SWATH_Type_L1B’][’Geolocation Fields’][’Longitude’][i][j])) 89 90 #Take the time after finishing the loop 91 Time2 = time.clock() 92 93 94 Time.write(’Converting from WGS84 to XYZ took using numpy’+str(Time2-Time1) +’ seconds\n’) 95 96 Time1 = time.clock() 97 98 99 100 for i in range(0,n2): for j in range(0,m2): face_list.append(((i*m+j),(i*m+j+m),(i*m+j+m+1),(i*m+j+1))) 101 102 Time2 = time.clock() 44 103 Chapter B Python Code Time.write(’Generating the face list took ’+str(Time2-Time1)+’ seconds\n’) 104 105 Time1 = time.clock() 106 me = bpy.data.meshes.new(ShortName+’Mesh’) 107 ob = bpy.data.objects.new(ShortName, me) 108 ob.location = (0,0,0) 109 ob.show_name = True 110 # Link object to scene 111 bpy.context.scene.objects.link(ob) 112 113 # Create mesh from given verts, edges, faces. Either edges or 114 # faces should be [], or you ask for problems 115 me.from_pydata(vertex_list, [], face_list) 116 117 # Update mesh with new data 118 me.update(calc_edges=True) 119 Time2 = time.clock() 120 Time.write(’Generating the object and linking it took ’+str(Time2-Time1) 121 +’ seconds\n’) 122 123 Time1 = time.clock() 124 #The following generates a new material if there is none available 125 if len(bpy.data.materials.keys())<1: 126 bpy.ops.material.new() 127 128 #Takes the name of the first material B.2 Version 1 129 45 MaterialName = bpy.data.materials.keys()[0] 130 131 #This next line sets the active object to the one we just created, necessary 132 # for the ops commands to work 133 bpy.context.scene.objects.active = ob 134 135 #Add a new material slot to the active object 136 bpy.ops.object.material_slot_add() 137 138 #Set the Material for the object to the first one 139 ob.material_slots[’’].material = bpy.data.materials[MaterialName] 140 141 #Set the first material to use Vertex color painting 142 bpy.data.materials[MaterialName].use_vertex_color_paint = True 143 144 #Finally generate the data structure that stores the vertex paint information 145 bpy.data.objects[ShortName].data.vertex_colors.new() 146 147 Time2 = time.clock() 148 Time.write(’Generating the material and adding the vertex paint layer took ’ 149 +str(Time2-Time1)+’ seconds\n’) 150 151 Time1 = time.clock() 152 #Take in the information about the recorded radiances and scale to between 0 153 # and 1. This is also where you can set what channel to use. 154 Edata1 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’][’EV_1KM_RefSB’][7] 46 155 156 157 158 159 Chapter B Python Code /32767) Edata2 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’][’EV_1KM_RefSB’][3] /32767) Edata3 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’] [’EV_500_Aggr1km_RefSB’][0]/32767) 160 Time2 = time.clock() 161 Time.write(’Reading in the data took ’+str(Time2-Time1)+’ seconds\n’) 162 163 Time1 = time.clock() 164 #This for loop structure is to make sure that the elements are between 0 and 1 165 # because outside of that indicates error, for now I am zeroing the data for 166 # testing purposes 167 for i in range(0,n): 168 for j in range(0,m): 169 if Edata1[i][j] > 1: 170 Edata1[i][j] = 0 171 if Edata2[i][j] > 1: 172 Edata2[i][j] = 0 173 if Edata3[i][j] > 1: 174 Edata3[i][j] = 0 175 176 Time2 = time.clock() 177 Time.write(’Checking for error codes in the data took ’+str(Time2-Time1) 178 +’ seconds\n’) 179 180 Time1 = time.clock() B.3 Version 0 181 182 47 for i in range(0,n2): for j in range(0,m2): 183 index = i*m2+j 184 ob.data.vertex_colors[’Col’].data[index].color1 = (Edata1[i][j], 185 Edata2[i][j], 186 Edata3[i][j]) 187 ob.data.vertex_colors[’Col’].data[index].color2 = (Edata1[i+1][j], 188 Edata2[i+1][j], 189 Edata3[i+1][j]) 190 ob.data.vertex_colors[’Col’].data[index].color3 = (Edata1[i+1][j+1], 191 Edata2[i+1][j+1], 192 Edata3[i+1][j+1]) 193 ob.data.vertex_colors[’Col’].data[index].color4 = (Edata1[i][j+1], 194 Edata2[i][j+1], 195 Edata3[i][j+1]) 196 197 Time2 = time.clock() 198 Time.write(’Painting the vertices took ’+str(Time2-Time1)+’ seconds\n’) 199 Time.close() B.3 1 Version 0 #Libraries used 2 3 import bpy 48 Chapter B Python Code 4 import math 5 import sys 6 import time 7 8 #The following string is used to indicate where the library packages are stored 9 # change to match the location on your system. This is necessary to find numpy 10 # and h5py if the libraries are already in one of the searched directories then 11 # comment it out 12 13 sys.path.append(’/usr/local/lib/python3.2/dist-packages’) 14 15 import numpy 16 import h5py 17 18 #Internal functions 19 20 #WGS84toXYZ takes in the latitude and longitude in terms of degrees with 21 # latitude and longitude and computes the x,y,z coordinates for them based on 22 # the WGS84 Geoide. 23 # system This does not account for any rotation of the coordinate 24 25 def WGS84toXYZ(phi,theta): 26 a = 6.378137 #This is the semi major axisreference datum for wgs 84 27 b = 6.356752314245 #This is the semi minor axis 28 p = (phi*numpy.pi)/180 29 r = math.sqrt(1/((numpy.sin(p)*numpy.sin(p)/(a*a))+((numpy.cos(p)* B.3 Version 0 49 numpy.cos(p))/(b*b)))) 30 31 t = ((theta)*math.pi)/180 32 x = r*numpy.sin(p)*numpy.cos(t) 33 y = r*numpy.sin(p)*numpy.sin(t) 34 z = r*numpy.cos(p) 35 return x,y,z 36 37 #This function takes in the latitude and longitude and computes the x,y,z 38 # coordinate for them based on the Sinusoidal projection system used by some 39 # MODIS gridded data products 40 def MODISSINtoXYZ(phi,theta): 41 r = 6.371007181 42 p = (phi*math.pi)/180 43 x = r*math.sin(p)*math.cos(t) 44 y = r*math.sin(p)*math.sin(t) 45 z = r*math.cos(p) 46 return x,y,z 47 48 #Configuration values 49 50 #Name is the name of the hdf file and the path is the location to it. 51 name = ’MYD02SSH.A2012001.1945.005.2012002174518.1.h5’ 52 #name2 = ’MYD03.A2012001.1945.005.2012002170952.1.h5’ 53 ShortName = ’First’ 54 path = ’’ 55 #These are the dimensions of the data set. This data does exist within the 50 Chapter B Python Code 56 # data file itself but I have not taken the time to learn how to access that 57 # specific attribute yet. 58 # recognized because it has nested attributes. 59 # be found using HDFView and entered here. 60 # that it makes more sense to compute once and reference. 61 n = 406 62 n2 = n-1 63 m = 271 64 m2 = m-1 This might be because the hdf-eos extension is not Either way these values can n2 and m2 are referenced so often 65 66 67 #for profiling the for loops to see where the most time is spent is handled 68 # through time.clock and written to file every time it is run 69 Time = open(’time’,’at’) 70 Time.write(’This is the time for a run of ’+name+’\n’) 71 Time1 = 0 72 Time2 = 0 73 74 #Creating the file handle 75 H5File = h5py.File(path+name,’r’) 76 #H5File2 = h5py.File(path+name2,’r’) 77 78 #These are the list objects where the data for the mesh frame will be stored 79 vertex_list = [] 80 face_list = [] 81 B.3 Version 0 82 #Take the time before starting the loop 83 Time1 = time.clock() 51 84 85 86 87 for i in range(0,n): for j in range(0,m): vertex_list.append(WGS84toXYZ( 88 H5File[’MODIS_SWATH_Type_L1B’][’Geolocation Fields’][’Latitude’][i][j], 89 H5File[’MODIS_SWATH_Type_L1B’][’Geolocation Fields’][’Longitude’][i][j])) 90 91 #Take the time after finishing the loop 92 Time2 = time.clock() 93 94 95 Time.write(’Converting from WGS84 to XYZ took using numpy’+str(Time2-Time1) +’ seconds\n’) 96 97 Time1 = time.clock() 98 99 100 101 for i in range(0,n2): for j in range(0,m2): face_list.append(((i*m+j),(i*m+j+m),(i*m+j+m+1),(i*m+j+1))) 102 103 Time2 = time.clock() 104 Time.write(’Generating the face list took ’+str(Time2-Time1)+’ seconds\n’) 105 106 Time1 = time.clock() 107 me = bpy.data.meshes.new(ShortName+’Mesh’) 52 Chapter B Python Code 108 ob = bpy.data.objects.new(ShortName, me) 109 ob.location = (0,0,0) 110 ob.show_name = True 111 # Link object to scene 112 bpy.context.scene.objects.link(ob) 113 114 # Create mesh from given verts, edges, faces. Either edges or 115 # faces should be [], or you ask for problems 116 me.from_pydata(vertex_list, [], face_list) 117 118 # Update mesh with new data 119 me.update(calc_edges=True) 120 Time2 = time.clock() 121 Time.write(’Generating the object and linking it took ’+str(Time2-Time1) 122 +’ seconds\n’) 123 124 Time1 = time.clock() 125 #The following generates a new material if there is none available 126 if len(bpy.data.materials.keys())<1: 127 bpy.ops.material.new() 128 129 #Takes the name of the first material 130 MaterialName = bpy.data.materials.keys()[0] 131 132 #This next line sets the active object to the one we just created, necessary 133 # for the ops commands to work B.3 Version 0 134 53 bpy.context.scene.objects.active = ob 135 136 #Add a new material slot to the active object 137 bpy.ops.object.material_slot_add() 138 139 #Set the Material for the object to the first one 140 ob.material_slots[’’].material = bpy.data.materials[MaterialName] 141 142 #Set the first material to use Vertex color painting 143 bpy.data.materials[MaterialName].use_vertex_color_paint = True 144 145 #Finally generate the data structure that stores the vertex paint information 146 bpy.data.objects[ShortName].data.vertex_colors.new() 147 148 Time2 = time.clock() 149 Time.write(’Generating the material and adding the vertex paint layer took ’ 150 +str(Time2-Time1)+’ seconds\n’) 151 152 Time1 = time.clock() 153 #Take in the information about the recorded radiances and scale to between 0 154 # and 1. This is also where you can set what channel to use. 155 Edata1 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’][’EV_1KM_RefSB’][7] 156 157 158 159 /32767) Edata2 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’][’EV_1KM_RefSB’][3] /32767) Edata3 = (H5File[’MODIS_SWATH_Type_L1B’][’Data Fields’] 54 160 Chapter B Python Code [’EV_500_Aggr1km_RefSB’][0]/32767) 161 Time2 = time.clock() 162 Time.write(’Reading in the data took ’+str(Time2-Time1)+’ seconds\n’) 163 164 Time1 = time.clock() 165 #This for loop structure is to make sure that the elements are between 0 and 1 166 # because outside of that indicates error, for now I am zeroing the data for 167 # testing purposes 168 for i in range(0,n): 169 for j in range(0,m): 170 if Edata1[i][j] > 1: 171 Edata1[i][j] = 0 172 if Edata2[i][j] > 1: 173 Edata2[i][j] = 0 174 if Edata3[i][j] > 1: 175 Edata3[i][j] = 0 176 177 Time2 = time.clock() 178 Time.write(’Checking for error codes in the data took ’+str(Time2-Time1) 179 +’ seconds\n’) 180 181 Time1 = time.clock() 182 for i in range(0,n2): 183 for j in range(0,m2): 184 index = i*m2+j 185 ob.data.vertex_colors[’Col’].data[index].color1 = (Edata1[i][j], B.3 Version 0 55 186 Edata2[i][j], 187 Edata3[i][j]) 188 ob.data.vertex_colors[’Col’].data[index].color2 = (Edata1[i+1][j], 189 Edata2[i+1][j], 190 Edata3[i+1][j]) 191 ob.data.vertex_colors[’Col’].data[index].color3 = (Edata1[i+1][j+1], 192 Edata2[i+1][j+1], 193 Edata3[i+1][j+1]) 194 ob.data.vertex_colors[’Col’].data[index].color4 = (Edata1[i][j+1], 195 Edata2[i][j+1], 196 Edata3[i][j+1]) 197 198 Time2 = time.clock() 199 Time.write(’Painting the vertices took ’+str(Time2-Time1)+’ seconds\n’) 200 Time.close() 56 Chapter B Python Code