Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
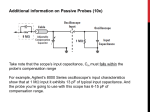
Robotics Integrated System Design Lab Assignment 3 Team MNR Group Members: Mike Moore Nick Stalker Ross Mead Objectives To become familiar with interfacing sensors to the Handy Board To design, build, and test a custom electronic circuit that can locate a light source To work as a team on an integrated system that includes mechanics, electronics, and computation. To have even more fun than we had on the last project. Requirements Design and build a light sensor for use with the robot that can "home in" on a light source. Successful completion of this challenge will require the robot to "home in" on a light source to reach a goal area. The goal area is 24” from the robot and the robot can be placed with 45 degrees of variation from the heading of the light source The robot should remain "quiet" until the light source is turned on. Once the light source is turned on, the robot should "home-in" on the source as quickly as possible. The robot only needs to be touching the goal area (as opposed to contained in), but must be able to stop there and not collide with the light. A black line (0.5" wide) will encircle the light; thereby defining the goal area. This needs to be completed in less than 10 seconds. The custom sensor MUST be used for “homing-in" on the light source, however, other LEGO sensors may be used for tasks such as determining when the robot has reached the goal zone and should stop Analysis 1. Research: The only consulting that was done was using the Analog Devices datasheet for gain equations for the AD623. 2. Assumptions: We assumed that the ground surface was flat and obstacle-free between the start area and the light source. We assumed that there would not be competing light sources to confuse the robot. 3. Formulation : The system components contained the following: Photo sensors Gain Amplifier Electronic Filter Handy Board The program residing on the handy board represented the control logic. Solution process The solution implemented was to use a differential output which would be referenced at 2.5 volts. If one of the eyes were more resistive than the other, the voltage would be amplified and added to the reference voltage if the opposite is true for the reverse condition. Testing of the electrical design consisted of using an arbitrary value of resistances and reading various photo sensor and Opamp readings at 2 different positions on the test plane. From those readings, the gain could be lowered or raised and the voltage divider resistors could be changed to achieve desired readings. A 10K resistor was used on the sensor board and values of resistance on the photo sensor were taken at a direct heading and at 45 degrees when the room’s lights were on as seen in Table 1. The light/no light condition is referenced to the light source being turned on and off. Resistance Readings Right Eye Left Eye 45Degrees No Light Light Direct 5.28k 5.27k 5.85k 5.72k Light No Light 5.74k 5.77k 5.13k 5.11k Table 1 During initial testing no gain resistor was used and there was no sensitivity to light as displayed by the constant reference voltage. The lights in the room were completely turned off and there was still a lack of sensitivity. After a 2.26 gain was implemented a change in the differential output can be seen in Table 2. Differential Output 45 Degrees Direct 2.5v 2.5v Before 3.14 1.03 After Table 2 Upon completion of the testing a value of 50k for the voltage divider and 79k for the gain resistor was selected since this would allow room for fluctuation in case the room darkened. A simple RC low pass filter was installed on the output of the AD623 with a 1uf and 63K resistor so that the max sampling frequency would be 5Hz this would block any switching noise from the Handy Board. Alternative Solution While more complicated to encode, the differential signals from the photo sensors could be used and calculated using software, this would require more extensive code instead of letting the hardware calculate the difference. Team challenges Mechanical From the mechanical standpoint, few challenges were encountered in order to fulfill the lab assignment’s requirements. Since the robot from a previous assignment was being used, only small modifications had to be made. We wanted the robot faster for this project. Precision in steering wasn’t as important in this case, so the robot was geared for more speed. Initially there was a 3 to 1 drive ratio. We swapped the two gears to make a 1 to 3 ratio. Now for every turn of the motor shaft, the driveshaft turns three times. This modification results in a robot that can reach the goal area 9 times faster. This proved not to be the case since the speed went up, the torque went down, and the robot could not power itself. The gear ratio regressed to the value used during the sonar lab which was 1:1. Electrical While using the previous robot, the sensor circuit board that was given would have required the redesign of the robot since the way the sensor board was positioned, it placed the photo detectors on the starboard side of the robot instead of its bow. A custom circuit board was fabricated to house the photo sensors and placed on the turret like the previous lab with the sonar and a wire harness was run from the turret board to the sensor board. See the appendix for pictures. Another issue that arose was what type of output to display to the analog ports of the handy board. The differential output of the AD623 was chosen to feed position information to the handy board. Pull up resistors of 50K were used to pull the photo sensors up to 5 volts in the voltage divider. When the handy board was placed in a dark environment the voltage divider neared almost 4.9 volts with 10K resistors so 50K was a more reasonable value. The custom board designed to hold the light sensors ran into some minor issues that caused the consumption of a large of amount of group time. It appeared that the distance between the photo sensors affected the differential gain of the Opamp giving erroneous values. This was solved by redesigning the board and placing the sensors as close together as possible. See appendix for the custom interface board. A gain resistor chosen of 79K was chosen to be implemented with the AD623. When the robot was first tested at 2 feet from the source, the photocells were non linear in nature since the intensity of light fell off at a 1/R^2 rate. The sensors were not very sensitive to the source. Therefore, a pot was put on to the gain input to determine what value of gain was needed to allow for light detection. To determine the gain, the 1M pot was just turned until the robots gain sensed the minor change in light. Using the equation given in the datasheet, the 79K resistor provided a gain of 2.26. During testing, the ambient light caused the sensors to misread positions, so “blinders” were placed onto each photo sensor and between the photo sensors. Another issue that arose was that there were some anomalies in readings when the robot scanned the light source. At the 45 degree angle there were some inconsistent values that the light sensors “home in on”, even though there was no direct light source. This was solved using by going to a differential signal instead and filtering out the erroneous data using the software of the handy board. Software Even when the robot was placed in the direct line of light, the sensor readings did not display the 2.5v reference expected since there were some offsets. This was alleviated in software. In the 45 degree position the values fluctuated even with shielding causing the robot to home in on erroneous data. Erroneous data points were filtered out using code. The software was also used to calibrate the sensor to the light source due to the fact that the intensity would drop off after many hours of testing. Conclusion While the lab seemed the very simple when modularized, it proved to be otherwise. This was the most time consuming lab to date. There were many unknown variables that were not accounted for such as 1. Light intensity 2. Ambient light 3. Sensor Anomalies 4. Sensor Shielding 5. Sensor Positioning Sensors offsets needed to be calculated for in software since the photo sensors were not linear in nature. It would be highly recommended to use heavy shielding for the light sensor and using software for comparison of the individual photo sensors and then comparing it to the single ended output so that erroneous data can be discarded. Appendix B.O.M. 2 50k resistors 35K resistor 63K resistor 2 Potentiometers AD623 Opamp 2 Photo sensors Handy Board Legos 1uf capacitor Custom circuit Board Sensor Board Lego light sensor TI 2.5v reference source 4.7uf Capacitor Headers Mounting Pins Pictures