Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
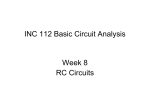
System Responses Dr. Holbert March 24, 2008 Lect16 EEE 202 1 Introduction • Today, we explore in greater depth the three cases for second-order systems – Real and unequal poles – Real and equal poles – Complex conjugate pair • This material is ripe with new terminology Lect16 EEE 202 2 Second-Order ODE • Recall: the second-order ODE has a form of d 2 x(t ) dx(t ) 2 20 0 x(t ) f (t ) 2 dt dt • For zero-initial conditions, the transfer function would be X( s) s 2 20 s 02 F( s) X( s ) 1 H ( s) 2 F( s) s 20 s 02 Lect16 EEE 202 3 Second-Order ODE • The denominator of the transfer function is known as the characteristic equation • To find the poles, we solve : s 2 0 s 0 2 2 0 which has two roots: s1 and s2 20 (20 ) 2 402 s1 , s2 0 0 2 1 2 Lect16 EEE 202 4 Damping Ratio () and Natural Frequency (0) • The damping ratio is ζ • The damping ratio determines what type of solution we will obtain: – Exponentially decreasing ( >1) – Exponentially decreasing sinusoid ( < 1) • The undamped natural frequency is 0 – Determines how fast sinusoids wiggle – Approximately equal to resonance frequency Lect16 EEE 202 5 Characteristic Equation Roots The roots of the characteristic equation determine whether the complementary (natural) solution wiggles s1 0 0 1 2 s2 0 0 2 1 Lect16 EEE 202 6 1. Real and Unequal Roots • If > 1, s1 and s2 are real and not equal xc (t ) K1e 2 1 t 0 0 K 2e 2 1 t 0 0 • This solution is overdamped Lect16 EEE 202 7 1 0.8 0.8 0.6 i(t) i(t) Overdamped 0.6 0.4 0.2 0 0.0E+00 0.4 0.2 0 5.0E-06 1.0E-05 -0.2 0.0E+00 5.0E-06 1.0E-05 Time Time Both of these graphs have a response of the form i(t) = K1 exp(–t/τ1) + K2 exp(–t/τ2) Lect16 EEE 202 8 2. Complex Roots • If < 1, s1 and s2 are complex • Define the following constants: 0 (Damping Coefficient) d 0 1 2 (Damped Natural Frequency) s1 , s2 j d xc (t ) e t A1 cos d t A2 sin d t • This solution is underdamped Lect16 EEE 202 9 Underdamped 1 0.8 0.6 i(t) 0.4 0.2 0 -1.00E-05 -0.2 1.00E-05 3.00E-05 -0.4 -0.6 -0.8 -1 Time A curve having a response of the form i(t) = e–t/τ [K1 cos(ωt) + K2 sin(ωt)] Lect16 EEE 202 10 3. Real and Equal Roots • If = 1, then s1 and s2 are real and equal xc (t ) K1e 0t K2 t e 0t • This solution is critically damped Lect16 EEE 202 11 IF Amplifier Example i(t) 10W vs(t) + – 769pF 159mH This is one possible implementation of the filter portion of an intermediate frequency (IF) amplifier Lect16 EEE 202 12 IF Amplifier Example (cont’d.) • The ODE describing the loop current is 2 d i (t ) R di(t ) 1 1 dvs (t ) i (t ) 2 dt L dt LC L dt 2 d i (t ) di(t ) 2 20 0 i (t ) f (t ) 2 dt dt • For this example, what are ζ and ω0? Lect16 EEE 202 13 IF Amplifier Example (cont’d.) 1 1 0 2.86 106 rad/sec LC (159 μH)(769 pF) R 10 W 20 0.011 L 159 μH 2 0 • Note that 0 = 2pf = 2p 455,000 Hz) • Is this system overdamped, underdamped, or critically damped? • What will the current look like? Lect16 EEE 202 14 IF Amplifier Example (cont’d.) i(t) • The shape of the current depends on the initial capacitor voltage and inductor current 1 0.8 0.6 0.4 0.2 0 -0.2 -1.00E-05 -0.4 -0.6 -0.8 -1 1.00E-05 3.00E-05 Time Lect16 EEE 202 15 Slightly Different Example i(t) 1kW vs(t) + – 769pF 159mH • Increase the resistor to 1kW • Exercise: what are and 0? Lect16 EEE 202 16 Different Example (cont’d.) • The natural (resonance) frequency does not change: 0 = 2p455,000 Hz) • But the damping ratio becomes = 2.2 • Is this system overdamped, underdamped, or critically damped? • What will the current look like? Lect16 EEE 202 17 Different Example (cont’d.) • The shape of the current depends on the initial capacitor voltage and inductor current 1 i(t) 0.8 0.6 0.4 0.2 0 0.0E+00 5.0E-06 1.0E-05 Time Lect16 EEE 202 18 Damping Summary Damping Poles (s1, s2) Ratio ζ>1 Real and unequal ζ=1 Real and equal Damping Overdamped Critically damped 0 < ζ < 1 Complex conjugate Underdamped pair set ζ=0 Purely imaginary pair Undamped Lect16 EEE 202 19 Transient and Steady-State Responses • The steady-state response of a circuit is the waveform after a long time has passed, and depends on the source(s) in the circuit – Constant sources give DC steady-state responses • DC steady-state if response approaches a constant – Sinusoidal sources give AC steady-state responses • AC steady-state if response approaches a sinusoid • The transient response is the circuit response minus the steady-state response Lect16 EEE 202 20 Transient and Steady-State Responses • Consider a time-domain response from an earlier example this semester 1.2 1 5 5 2 t 10 3t f (t ) e e 6 2 3 0.8 0.6 0.4 0.2 Steady State Response Lect16 Transient Response 0 0 1 2 Transient Response EEE 202 3 4 5 Steady-State Response 21 Class Examples • Drill Problems P7-6, P7-7, P7-8 Lect16 EEE 202 22