Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Valve RF amplifier wikipedia , lookup
Microcontroller wikipedia , lookup
Schmitt trigger wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Surge protector wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Power MOSFET wikipedia , lookup
Opto-isolator wikipedia , lookup
Current mirror wikipedia , lookup
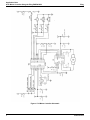
APPLICATION NOTE 1 A DC MOTOR CONTROLLER USING THE ZILOG Z86E06 MCU THIS DC MOTOR CONTROLLER MORE THAN MEETS THE CHALLENGES OF SMALLER PACKAGING AND HIGHER RELIABILITY. INTRODUCTION Many applications such as printers, ATM machines, robotics, CD players, and disk drives require DC motor control. Additionally, the demand for smaller packaging and higher reliability creates a need for more integrated motor driver solutions. In the past, a DC motor controller comprised a microcontroller (MCU) and many discrete components. Presently, advanced IC technology reduces the drive electronics to just two chips: an MCU and an integrated motor driver. This application note will present a DC motor controller, which uses the Zilog Z86E06 MCU and the National LMD18200 DC Motor Controller IC, that is both low cost and features a low parts count. MOTOR CONTROL BASICS Several DC motor design topologies exist, but certainly the most widely used method is the “H-bridge” configuration. This method uses four Bi-polar Junction Transistor (BJT) or Metal-Oxide Silicon Field Effect Transistor (MOSFET) devices configured in an “H” pattern (see Figure 1). In the center of the “H” is the motor itself. To drive the motor in the forward direction, current flows through Q1 and Q4. To turn the motor in the reverse direction, Q1 and Q4 are turned off, and Q2 and Q3 are energized. External logic is needed to gate the devices. Motor speed is controlled by the average current flowing in the legs. This is regulated by a Pulse-Width Modulation (PWM) drive method, which relies on the duty cycle of a digital output to control the drive voltage to the MOSFETs (see Figure 2). Conventional designs require low-pass filtration to produce a constant DC voltage. Varying the duty cycle of the output varies the DC voltage. This DC voltage would then drive the power MOSFETs. The necessary steering logic is incorporated inside the LMD18200. The PWM is also accepted without the need for an external low-pass filter. Since the voltage drop across the collector and emitter can reach more than 1V during saturation, high heat dissipation is encountered using BJT devices. MOSFETs, with their intrinsically low Rds (drain to source turn-on resistance), are better suited for motor driver applications. Typically, power MOSFETs need a gate voltage of least 8V to turn on, which is a problem when using an MCU whose outputs swing from 0–5V. Special logic MOSFETs have been developed that have gate turn-on voltages of 5V. This works fine for the lower legs of the “H” motor drive, but AP96DZ80500 what about the upper legs? Unfortunately, the upper legs need a higher gate voltage, due to the fact that the motor's winding resistance raises the MOSFETs source reference above ground potential. A separate DC-DC convertor chip can be used, but this adds more cost and complexity to the design. The LMD18200 solves this problem by having a built-in DC-DC convertor. V Motor Q1 Q2 MOSFET MOSFET DC Motor Q3 MOSFET Q4 MOSFET Figure 1. H-Pattern Motor Driver Configuration 1 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU Zilog HARDWARE DESCRIPTION The heart of the motor controller is the Zilog Z86E06, an 18-pin, One-Time Programmable (OTP) MCU, which contains 1KB of ROM, 128 bytes of RAM, 14 I/O lines, two timer/counters, and two on-board comparators. A block diagram of the chip is shown in Figure 2. The Z8® MCU is Output Input VCC clocked by a 4 MHz ceramic resonator, and the motor is controlled by the National LMD18200. This is a 3A H-Bridge driver IC with direction and braking logic, along with thermal and current sensing of the output drivers. The functional diagram of the LMD18200 is shown in Figure 3. GND Machine Timing & Inst. Control Port 3 1/2 Counter/ Timers [1] XTAL WDT, POR ALU Interrupt Control FLAG Two Analog Comparators Register Pointer Serial [2] Register File 60/124 x 8-Bit Prg. Memory 512/1K x 8-Bit Program Counter Peripheral Interface Port 2 Notes: [1] Z86E03 has one counter/timer. [2] Serial Perifpheral Interface for the Z86E06 only. I/O (Bit Programmable) Figure 2. Z86E03/E06 Functional Block Diagram 2 AP96DZ80500 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU Zilog Thermal Flag Output 9 Bootstrap 1 1 Output 1 2 Vs 6 Output 2 10 Bootstrap 2 11 1 Thermal Sensing Under-Voltage Lockout Charge Pump Drive Overcurrent Detection Charge Pump Drive Current Sensing Current 8 Sense Output Shutdown Direction 3 Brake 4 Input Logic PWM 5 7 Ground Figure 3. LMD18200 Functional Diagram Referring to the Z86E03/E06 schematic diagram (see Figure 4), output port pins P34, P35, and P36 of the Z86E06 provide direction, brake, and PWM signals, respectively, to the LMD18200. The current sensing is done with a resistor to ground from pin 8 of the LMD18200. The current output from this pin is typically 377 µA/per A. If the motor is rated at 1A, a resistor value is chosen so that the voltage developed across the resistor does not exceed 4V, which is the maximum input voltage to the comparator on-board the Z86E06. This calculates out to be 10.6K ohms (4V/377µA). For this application, the motor was rated at 12V @ 0.6A. A resistor value of 2.7K ohms was chosen to give a maximum voltage across the resistor of approximately 2.5V at all speeds. This voltage is sensed by one of the Z8® MCU’s on-board comparators. The reference pin for the comparators (P33) is biased at 3.3V through a voltage divider. The temperature flag pin (9) of the LMD18200 is connected to P32 of the Z8 MCU. This is an open-collector output, therefore it is pulled up to +5V with a 10K ohm resistor. The function of this pin is to interrupt the processor when the junction temperature of the LMD18200 exceeds 145 degrees C. This is an active-low output, which will trip the Z8 MCU comparator at P32. A push button connected to P20-P22 of the Z8 MCU provides the speed and brake control. Any significant load on the motor will increase the motor current, thereby increasing the voltage across the current sense resistor. If the voltage across the sense resistor exceeds 3.3V, a comparator interrupt will be generated, and the BRAKE line to the LMD18200 will be activated, stopping the motor. When the load condition of the motor is removed, pressing the STOP push button reactivates the motor. The motor terminals are connected between the OUT1 and OUT2 terminals of the LMD18200. The 0.1 µF ceramic capacitors are connected between the bootstrap pins (1,11) and motor output pins (2,10). The Vs pin is connected to +12V. This line is bypassed with a 220 µF and 0.1 µF capacitors. AP96DZ80500 The SPDT toggle switch connected to P23 provides the direction (high is forward, low is reverse). Direction changing can only be done in a STOP condition. Status LEDs show the direction and stop conditions. The STOP LED (red) is connected to P24. The FORWARD (yellow), and REVERSE (green) LEDs are connected to P25 and P26, respectively. 3 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU Zilog Figure 4. DC Motor Controller Schematic 4 AP96DZ80500 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU Zilog SOFTWARE DESCRIPTION The motor controller software flowchart is shown in Figure 5. After initialization, the controller waits for a timer T0 interrupt. The timer interval is set for about 500 µs. This was chosen to provide a 2000 Hz. sample rate for the PWM. The SAMPLE interrupt service routine essentially handles two functions: ■ The PWM Output ■ Sensing and Debouncing of the Push Button The comparator interrupts sense overload and overtemperature conditions. (Refer to Code Listing at the conclusion of this application note.) Initialization 1. Set PWM for 50%. 2. Set brake bit. 3. Turn on Stop LED. 4. Load and enable timers. 5. Enable interrupts. A Decrease Button? Wait for Interrupts Yes Debounce Count Reached? Save Button Status Yes No Brake Button? No No PWM at MIN? Yes T0 Interrupt Yes 1. Set P36 High 2. Reload and enable controls Any Buttons Down? No 1. Toggle brake bit 2. Toggle stop LED 1. DEC PWM 2. Load T1 with PMW count Exit B Exit Yes Increase Button? No Yes Debounce Count Reached? No Save Button Status Over-temperature interrupt routine Set brake bit Yes A Yes Return PWM = MAX? Over-current interrupt routine 1. Increment PWM 2. Load T1 Set brake bit Return B Figure 5. DC Motor Flowchart AP96DZ80500 5 1 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU Zilog Refer to Figure 6 for PWM Waveforms. The initial PWM is set for a 50-percent duty cycle. The initial state is STOP, as indicated by the red LED. The motor may be taken out of STOP by momentarily pressing the STOP button. The motor will then turn at a speed determined by the PWM value and either clockwise or counterclockwise, as determined by the DIRECTION switch. The duty cycle of the PWM is controlled by timer T1. This is loaded with a value contained in register PWM. The timer is configured to count down, then stop when it reaches zero. When it hits terminal count, it toggles port pin P36 from high to low. The timer is loaded with its initial value, and P36 is taken high on the next pass of the T0 interrupt interval. The timer T0 sets the sampling rate, in this case 2000 Hz. Pressing the INCREASE push button increases the duty cycle of the PWM, while the DECREASE push button decreases the duty cycle of the PWM. The maximum limits are 240/256 (93 percent) and 32/256 (12.5 percent), respectively. Pressing the STOP button toggles the BRAKE output to the LMD18200, and either brakes or enables the motor, depending on the present state. A B C A = 33% B = 50% C = 84% Figure 6. PWM Waveforms Duty Cycle The temperature flag input to the Z8® MCU senses the condition of this signal from the LMD18200. This pin goes active low when the junction temperature of the motor controller reaches 145 degrees C. The assertion of this pin (active low) causes the compartor to trip at P32, interrupting the processor. The OVER_TEMP interrupt service routine sets the BRAKE output to high, disabling the motor. This condition will exist until the THERMAL FLAG bit goes high again. REMOTE CONTROL Instead of push button switches to control the functions and speed of the motor, an I2C or asynchronous communications protocol can be added for remote control. REFERENCES Speed 4. Zilog, Zilog Discrete Z8 Microcontrollers Product Specifications Databook, DC 8318-02. 2. Jeff Bachiacchi, “Creating The Smart-MD,” Circuit Cellar Ink, September–October,1995. 5. Zilog, Zilog Z8 Microcontroller User’s Manual, UM95Z800103. 3. National Semiconductor, LMD18200 datasheet. ˙ 1. Chuck McManis, “A PIC-based Motor Controller,” Circuit Cellar Ink , July, 1995. 6 AP96DZ80500 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU Zilog CODE LISTING asmS8 version 2.1 Tue Feb 27 02:59:25 1996 LOC OBJ abs abs abs abs abs abs abs abs abs abs abs abs 00000004 00000005 00000006 00000007 00000008 00000009 0000000a 0000000b 0000000c 0000000e 0000000f 0000000e 00000000000000000001 00000000000000000002 00000000000000000003 00000000000000000008 00000000000000000007 00000000000000000020 000000000000000000e0 00000000000000000001 00000000000000000004 00000000000000000010 00000000000000000020 00000000000000000040 AP96DZ80500 1 b:\testdnm LINE# --- SOURCE --1 ;---------------------------------------------------------------------------2 ; This program is intended to control a DC motor with a Zilog 3 ; microcontroller. The Z8 produces a PWM (Pulse-Width Modulation) signal 4 ; that drives a National LMD18200 H-bridge motor driver. This allows 5 ; full directional and speed control of the motor. The speed, 6 ; direction, and stop functions are controlled by pushbutton switches. 7 ; A status LED indicates Forward (Green), Reverse (Yellow), and Stop 8 ; (Red) conditions. A voltage feedback from the H-bridge allows the 9 ; microcontroller to monitor the current through the motor. This is 10 ; implemented with a series resistor from the Is pin of the H-bridge, 11 ; and the voltage developed across the resistor is proportional to the 12 ; current through the motor. This voltage is fed back to one of the Z8's 13 ; on-chip analog comparators. 14 ; 15 ; 16 ; 17 ; Z86E06 pin assignments 18 ; --------------------19 ; 1 18 20 ; --------------21 ;FORWARD LED - | P24 P23 | - DIR SWITCH 22 ; | | 23 ;REVERSE LED - | P25 P22 | - STOP PUSHBUTTON 24 ; | | 25 ; STOP LED - | P26 P21 | - SPEED DECREASE PUSHBUTTON 26 ; | | 27 ; N/C - | P27 P20 | - SPEED INCREASE PUSHBUTTON 28 ; | | 29 ; +5V | Vcc GND | - GND 30 ; | | 31 ; OSC | Xtal1 P36 | - PWM OUT 32 ; | | 33 ; OSC | Xtal2 P35 | - STOP 34 ; | | 35 ; Vref | P33 P34 | - DIRECTION 36 ; | | 37 ; Tf | P32 P31 | - Is 38 ; --------------39 ; 9 10 40 ; 41 ;---------------------------------------------------------------------------42 43 bounce .equ r4 44 count .equ r5 45 key_cnt .equ r6 46 key_temp .equ r7 47 temp_1 .equ r8 48 pwm .equ r9 49 make .equ r10 50 STATE .EQU R11 51 temp_led .equ r12 52 delay_hi .equ r14 53 delay_lo .equ r15 54 delay .equ rr14 55 56 increase .equ 01h 57 decrease .equ 02h 58 brake .equ 03h 59 dir_sw .equ 08h 60 switches .equ 07h 61 min .equ 20h 62 max .equ 0e0h 63 irq0 .equ 01h 64 irq2 .equ 04h 65 irq4 .equ 10h 66 brakes_on .equ 20h 67 stop_led .equ 40h 7 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU 00000000000000000020 00000000000000000010 00000000000000000000 00000000000000000001 00000000000000000002 00000000 00000000 00000002 00000004 00000006 00000008 0000000a Wwww Wwww Wwww Wwww Wwww Wwww 0000000c 0000000c 0000000d 0000000f 00000012 00000015 00000018 0000001b 0000001e 00000020 00000022 00000025 00000027 0000002a 0000002d 00000030 00000032 00000034 00000036 00000038 0000003a 0000003c 0000003f 00000042 00000043 8f 3100 e6f60f e602bf e6f702 e6f804 e6ff80 b0fe b0fa e6f504 b0f4 e6fb10 e6f306 e60360 bc00 b0f9 b0ee b0ef 9c80 99f2 e6f18f e6fa80 9f 8bfd 00000045 00000048 0000004a 0000004d 00000050 460320 bc00 e602bf e6fb10 bf 00000051 00000054 00000056 00000059 0000005c 460320 bc00 e602bf e6fb10 bf 0000005d 00000060 00000062 00000065 00000067 a6eb00 eb** 760208 6b** 460310 8 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 Zilog reverse_led .equ 20h forward_led .equ 10h stopped .equ 00h start_up .equ 01h running .equ 02h ;---------------------------------------------------------------------------; INITIALIZATION ;---------------------------------------------------------------------------.org 0000h .word .word .word .word .word .word over_temp no_irq over_current no_irq sample no_irq .org 000ch di ; disable int srp #0 ; lowest bank ld p2m,#0fh ; inputs on p20-p23, outputs on p24-p27 ld p2,^C #stop_led ; load with initial values ld p3m,#2 ; open drain on P2, comparators on ld p01m,#04h ; int stack ld spl,#80h ; stack at highest ram location clr sph ; clear stack pointer high byte clr irq ; clear int request reg ld pre0,#04h ; load prescaler 0 with /1, one-shot clr t0 ; set timer TC for period of 0.5 mS ld imr,#irq4 ; set interrupt levels ld pre1,#06h ; one shot ld p3,#60h ; brakes on, pwm high ld STATE,#stopped ; clr ipr ; clr delay_hi ; clr delay_lo ; ld pwm,#80h ; start with pwm = 50% ld t1,pwm ; load timer with pwm value ld tmr,#8fh ; load and enable t0,t1 ld irq,#80h ; rising on irq2, falling on irq0 delay_loop: ei ; enable interrupts jr delay_loop ; wait for interrupts ;---------------------------------------------------------------------------; OVER-TEMPERATURE INTERRUPT ROUTINE ;---------------------------------------------------------------------------over_temp: or p3,#brakes_on ; set BRAKE line high ld STATE,#stopped ; ld p2,^C #stop_led ; ld imr,#irq4 ; iret ; return from interrupt ;---------------------------------------------------------------------------; OVER-CURRENT INTERRUPT ROUTINE ;---------------------------------------------------------------------------over_current: or p3,#brakes_on ; set BRAKE line high ld STATE,#stopped ; ld p2,^C #stop_led ; ld imr,#irq4 ; iret ; ;---------------------------------------------------------------------------; TIMER 0 INTERRUPT ROUTINE ; ; This routine performs the following functions: ; ; 1) Sets sample rate for PWM at 2000 Hz ; 2) Tests for key closures and checks direction switch ;---------------------------------------------------------------------------sample: cp STATE,#stopped ; check if stopped jr ne,test_start_up; tm p2,#dir_sw ; test direction switch jr z,ccw ; if low, then reverse or p3,#10h ; if high, then forward AP96DZ80500 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU Zilog 0000006a 0000006c 0000006e 00000071 00000073 00000076 00000078 0000007a 0000007c 0000007f 00000081 00000084 00000087 0000008a 0000008c 0000008e 00000090 00000091 00000092 00000094 00000096 00000098 0000009a 0000009b 0000009e 000000a0 000000a3 000000a5 000000a8 000000aa 000000ab 000000ad 000000af 000000b2 000000b4 000000b7 000000b9 000000bb 000000bd 000000bf 000000c2 000000c4 000000c7 000000c9 000000cc 000000ce 000000d1 000000d3 000000d5 000000d7 000000d9 000000db 000000de 000000e0 000000e3 000000e5 000000e7 000000e9 000000ea 000000ec 000000ee 000000f0 000000f2 000000f4 000000f6 ccef 8b** 5603ef ccdf a6eb01 eb** 80ee eb** e6fb15 bc02 460340 e6f18f 660207 6b** 8802 5c03 6e df c0e8 7b** a276 eb** 4e a6e480 7b** a6e601 eb** a6e9e0 6b** 9e 99f2 8b** a6e602 eb** a6e920 3b** 00e9 99f2 8b** a6e603 eb** a6eaff 6b** b60320 acff 760320 eb** c902 bc01 8b** bc00 e6fb10 c802 e602bf 8b** 78e6 b0e6 bf 5aa4 b0ea b0e4 b0e6 b0e7 b0e5 bf AP96DZ80500 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 ccw: test_start_up: continue: key_scan: key_loop: try_decrease: try_brake: test_dir: load_keys: no_keys: exit: exit_1: no_irq: ld jr and ld cp jr decw jr ld ld or ld tcm jr ld ld inc scf rrc jr cp jr inc cp jr cp jr cp jr inc ld jr cp jr cp jr dec ld jr cp jr cp jr xor ld tm jr ld ld jr ld ld ld ld jr ld clr iret djnz clr clr clr clr clr iret temp_led,^C #forward_led continue ; p3,^C #10h ; temp_led,^C #reverse_led STATE,#start_up ; ne,continue ; delay ; nz,continue ; imr,#irq4+irq2+irq0; STATE,#running ; p3,#40h ; tmr,#8fh ; p2,#switches ; z,exit ; temp_1,p2 ; count,#3 ; key_cnt ; ; temp_1 ; c,no_keys ; key_temp,key_cnt ; ne,load_keys ; bounce ; bounce,#80h ; ult,load_keys ; key_cnt,#increase ; ne,try_decrease ; pwm,#max ; eq,exit ; pwm ; t1,pwm ; exit ; key_cnt,#decrease ; ne,try_brake ; pwm,#min ; ule,exit ; pwm ; t1,pwm ; exit ; key_cnt,#brake ; ne,exit ; make,#0ffh ; eq,exit_1 ; p3,#20h ; make,#0ffh ; p3,#20h ; nz,test_dir ; p2,temp_led ; STATE,#start_up ; exit_1 ; STATE,#stopped ; imr,#irq4 ; temp_led,p2 ; p2,^C #stop_led ; exit_1 ; key_temp,key_cnt ; key_cnt ; ; count,key_loop ; make ; bounce ; key_cnt ; key_temp ; count ; ; take direction bit low 1 take pwm high load and enable timer any switches pressed? no, then exit get switch data load counter inc key count set carry flag rotate right any carry? same key? not the same increment bounce counter bounce = 127 ? no action if less increase key? no, try decrease key are we at maximum pwm? yes, don't increment increment pwm (increase speed) load timer with pwm value exit routine decrease key? try brake key is pwm at minimum? if yes, don't decrement decrement pwm (decrease speed) load new pwm value exit brake button down? exit if not button still down? yes - take no action toggle brake bit set make flag brake high? test dir sw if brakes are on only load direction led motor turning exit get led data turn on stop led transfer key data clear key register return to interrupt tested all keys? clear key registers return from interrupt .end 9 Application Note A DC Motor Controller Using the Zilog Z86E06 MCU © 1997 by Zilog, Inc. All rights reserved. No part of this document may be copied or reproduced in any form or by any means without the prior written consent of Zilog, Inc. The information in this document is subject to change without notice. Devices sold by Zilog, Inc. are covered by warranty and patent indemnification provisions appearing in Zilog, Inc. Terms and Conditions of Sale only. Zilog, Inc. makes no warranty, express, statutory, implied or by description, regarding the information set forth herein or regarding the freedom of the described devices from intellectual property infringement. Zilog, Inc. makes no warranty of merchantability or fitness for any purpose. Zilog, Inc. shall not be responsible for any errors that may appear in this document. Zilog, Inc. makes no commitment to update or keep current the information contained in this document. 10 Zilog Zilog's products are not authorized for use as critical components in life support devices or systems unless a specific written agreement pertaining to such intended use is executed between the customer and Zilog prior to use. Life support devices or systems are those which are intended for surgical implantation into the body, or which sustains life whose failure to perform, when properly used in accordance with instructions for use provided in the labeling, can be reasonably expected to result in significant injury to the user. Zilog, Inc., 210 East Hacienda Ave. Campbell, CA 95008-6600 Telephone (408) 370-8000 FAX (408) 370-8056 BBS (408) 370-8024 Internet: http://www.zilog.com AP96DZ80500