Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Matrix (mathematics) wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Euclidean vector wikipedia , lookup
Orthogonal matrix wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Linear least squares (mathematics) wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
Vector space wikipedia , lookup
Covariance and contravariance of vectors wikipedia , lookup
Eigenvalues and eigenvectors wikipedia , lookup
Matrix multiplication wikipedia , lookup
Four-vector wikipedia , lookup
Matrix calculus wikipedia , lookup
Examples of
Linear Equations
a1 x a2 y b
a1 x a2 y a3 z b
Generally
a1 x1 a2 x2 an xn b
An equation in n-variables
or in n-unknowns
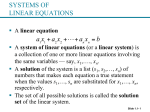
Linear System
A finite set of linear equations
is called a system of linear
equations or linear system.
The variables in a linear
system are called the
unknowns.
Linear System
a11 x1 a12 x2
a1n xn b1
a21 x1 a22 x2
a2 n xn b2
am1 x1 am 2 x2
amn xn bm
Homogenous
Linear Equations
If b=0
a1 x1 a2 x2 an xn 0
Theorem
Every system of linear
equations has zero,
one or infinitely many
solutions; there are
no other possibilities.
Echelon Form
All nonzero rows are above any
rows of all zeros.
Each leading entry of a row is
in a column to the right of the
leading entry of the row above
it.
All entries in a column below a
leading entry are zero.
Reduced Echelon Form
The leading entry in each
nonzero row is 1.
Each leading 1 is the only
non-zero entry in its
column.
Theorem
Each matrix is row equivalent
to one and only one reduced
echelon matrix
Row Reduction
Algorithm
Row Reduction Algorithm consists of
four steps, and it produces a matrix
in echelon form.
A fifth step produces a matrix in
reduced echelon form.
…
STEP 1
Begin with the leftmost
nonzero column. This is a
pivot column. The pivot
position is at the top.
STEP 2
Select a nonzero entry in the
pivot column as a pivot. If
necessary, interchange rows
to move this entry into the
pivot position
…
STEP 3
Use row operations to create zeros in all
positions below the pivot
STEP 4
Cover (ignore) the row containing the
pivot position and cover all rows, if any,
above it
Apply steps 1 –3 to the sub-matrix,
which remains.
Repeat the process until there are no
more nonzero rows to modify
Linear Combination
Given
and
v1 , v2 ,
scalars
, vp
in R
c1 , c2 ,
y c1v1 c2v2
, cp
c pv p
n
Definition
If v1, . . . , vp are in Rn, then
the set of all linear
combinations of v1, . . . , vp is
denoted by Span {v1, . . . , vp }
and is called the subset of Rn
spanned (or generated) by
v1, . . . , vp .
…
That is, Span {v1, . . . , vp } is
the collection of all vectors
that can be written in the form
c1v1 + c2v2 + …. + cpvp, with
c1, . . . , cp scalars.
Vector and Parametric
Equations of a Line
x x0 tv
( t )
( x, y ) ( x0 , y0 ) t (a, b)
( t )
( x, y, z) ( x0 , y0 , z0 ) t (a, b, c)
( t )
Vector and Parametric
Equations of a Plane
x x0 t1v1 t2v2
( t1 , t2 )
Vector and Parametric
Equations of a Plane
( x, y, z ) ( x0 , y0 , z0 )
t1 (a1 , b1 , c1 ) t2 (a2 , b2 , c2 )
( t1 , t2 )
Ax a1
a2
x1
.... an : x1a1 x2 a2 .... xn an
xn
Definition
x1
Ax a1 a2 ... an
xn
x1a1 x2 a2 ... xn an
Existence of
Solutions
The equation Ax = b has
a solution if and only if b
is a linear combination of
the columns of A.
Theorem
Let A be an mxn matrix. Then
the following statements are
logically equivalent. That is,
for a particular A, either they
are all true statements or they
are all false.
…
Continued
• For each b in Rm, the equation
Ax = b has a solution.
m
• The columns of A Span R .
• A has a pivot position in every
row.
Theorem
Let A be an mxn matrix, u
and v are vectors in Rn, and c
is a scalar, then
1. A ( u + v ) = Au + Av
2. A (cu) = c A (u)
Homogenous
Linear Systems
A system of linear equations
is said to be homogeneous
if it can be written in the
form Ax = 0, where A is an
mxn matrix and 0 is the zero
m
vector in R
Trivial Solution
Such a system Ax = 0 always
has at least one solution,
namely, x = 0
n
(the zero vector in R ).
This zero solution is usually
called the trivial solution.
Non Trivial Solution
The homogeneous
equation Ax = 0 has a
nontrivial solution if
and only if the
equation has at least
one free variable.
Solutions of Nonhomogenous Systems
When a non-homogeneous linear
system has many solutions, the
general solution can be written in
parametric vector form as one
vector plus an arbitrary linear
combination of vectors that
satisfy the corresponding
homogeneous system.
Parametric Form
The equation
x = p + tv (t in R)
describes the solution set
of Ax = b in parametric
vector form.
Definition
An indexed set in Rn is said
to be linearly independent if
the vector equation
x1v1+x2v2+…+xpvp=0
has only the trivial solution.
The columns of a matrix A
are linearly independent if
and only if the equation
Ax = 0 has only the trivial
solution.
A transformation T from
m
R is a rule that assigns to
n
each vector x in R a
m
vector T(x) in R . The set
n
R is called the domain of
m
T, and R is called the
co-domain of T.
T : Rn Rm
The notation T : R R
indicates that the domain of T is
n
m
R and the co-domain is R . For
n
m
x in R , the vector T(x) in R is
called the image of x (under the
action of T). The set of all
images T(x) is called the range
of T
n
m
A transformation (or mapping)
T is linear if:
• T(u + v) = T(u) + T(v) for all
u, v in the domain of T;
• T(cu) = cT(u) for all u and
all scalars c.
If T is a linear transformation,
then T(0) = 0, and
T(cu +dv) = cT(u) + dT(v)
for all vectors u, v in the domain
of T and all scalars c, d.
T (c1v1 c2v2
c pv p )
c1T (v1 ) c2T (v2 )
c pT (v p )
Every Linear
Transformation from
n
m
R to R is actually a
matrix Transformation
x Ax
T :R R
Let
be a linear transformation.
Then there exist a unique
matrix A such that T(x)=Ax
n
for all x in R .
n
m