Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
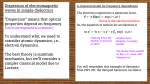
ST2334: SOME NOTES ON CONTINUOUS RANDOM
VARIABLES
In the following note we give some notes on continuous random variables.
Consider a discrete random variable X with support X and PMF f (x). Then
we have learnt that
P(X = x) = f (x) x ∈ X.
Now for a continuous random variable Y with support Y (lets say that Y has
‘nothing to do’ with X, for example associated to a different experiment) and PDF
g(y). Then
P(Y = y) = 0 y ∈ Y
that is, in general, one has P(Y = y)is not normally equal to g(y).
For X (the discrete random variable) we had learnt that the distribution function
F (x) is
X
F (x) =
f (u).
{u≤x∩u∈X}
Similarly, for Y we have for any y ∈ Y
Z
G(y) =
g(u)du.
{u≤y∩u∈Y}
If one thinks as g(y) as a continuous function, the distribution function represents
the area under the curve, to the left of y. More generally we had for X:
X
P(X ∈ A) =
f (x).
x∈A
Now for our continuous random variable
Z
P(Y ∈ B) =
g(y)dy.
B
In essence, all we are doing is replacing summation with integration. Note that all
the rules we have are repeated; e.g. for B1 and B2 two disjoint sets
Z
Z
Z
P(Y ∈ B1 ∪B2 ) =
g(y)dy =
g(y)dy+
g(y)dy = P(Y ∈ B1 )+P(Y ∈ B2 ).
B1 ∪B2
B1
B2
We note also, if Y = [a, b], −∞ < a < b < ∞
G(a) = 0 G(b) = 1.
If instead Y = [0, ∞):
G(0) = 0
lim G(u) = 1.
u→∞
Finally if Y = (−∞, ∞)
lim G(u) = 0
lim G(u) = 1
u→−∞
u→∞
1
2
ST2334
Example
Suppose that X ∼ N (µ, σ 2 ), that is the PDF of X is
o
n
1
1
x ∈ X = R.
f (x) = √ exp − 2 (x − µ)2
2σ
σ 2π
Let us find the distribution function.
First suppose that µ = 0 and σ 2 = 1; in this situation, we call X a standard
normal random variable. Now define
Z x
n 1 o
1
√ exp − u2 du.
P(X ≤ x) = Φ(x) =
2
2π
−∞
In general, the integral on the RHS cannot be computed in a closed form, but by
now there are very accurate approximations on a computer.
Second, let us consider the general case. We have
Z x
o
n
1
1
√ exp − 2 (u − µ)2 du
P(X ≤ x) =
2σ
−∞ σ 2π
Z x−µ
n 1 o
σ
1
√ exp − v 2 dv
=
2
2π
−∞
x − µ
= Φ
.
σ
We made the substitution v = (u − µ)/σ to go to the second line. This substituion
is called standardization for normal random variables.
Given a computer program to calculate Φ(x) we can then compute a variety of
probabilities associated to normal random variables. For example, if we want to
calculate the probability that X ∈ [a, b] for some −∞ < a < b < ∞, we have
P(X ∈ [a, b])
= P(X ≤ b) − P(X ≤ a)
a − µ
b − µ
−Φ
.
= Φ
σ
σ
To obtain the first equality, we remark that
P(X ∈ (−∞, b]) = P(X ∈ (−∞, a) ∪ [a, b]) = P(X ∈ (−∞, a)) + P(X ∈ [a, b])
so we have
P(X ∈ (−∞, b]) = P(X ∈ (−∞, a))+P(X ∈ [a, b]) ⇒ P(X ∈ [a, b]) = P(X ∈ (−∞, b])−P(X ∈ (−∞, a)).
We then note P(X ∈ (−∞, b]) = P(X ≤ b) and P(X ∈ (−∞, a)) = P(X ∈ (−∞, a])
(note that P(X = a) = 0). If this explanation is confusing;
we are just saying the area under the curve between [a, b] (for a
continuous function) is the difference between all the area to the
left of b take away all the area to the left of a.
Similarly for −∞ < a < b < c < d < ∞:
b − µ
a − µ
d − µ
c − µ
−Φ
+Φ
−Φ
.
P(X ∈ [a, b]∪[c, d]) = P(X ∈ [a, b])+P(X ∈ [c, d]) = Φ
σ
σ
σ
σ