Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
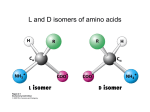
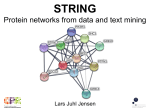
CZ5225 Methods in Computational Biology Lecture 7: Protein Structure and Structural Modeling Prof. Chen Yu Zong Tel: 6874-6877 Email: [email protected] http://xin.cz3.nus.edu.sg Room 07-24, level 7, SOC1, NUS August 2004 Protein Structural Organization Proteins are made from just 20 kinds of amino acids 2 Protein Structural Organization Protein has four levels of structural organization 3 Protein Structure Determines Its Interaction with Other Molecules: Protein-Protein Interaction 4 Protein Structure Determines Its Interaction with Other Molecules: Protein-DNA Interaction 5 Protein Structure Determines Its Interaction with Other Molecules: Protein-RNA Interaction 6 Protein Structure Determines Its Interaction with Other Molecules: Protein-Drug Interaction Mechanism of Drug Action: A drug interferes with the function of a disease protein by binding to it. This interference stops the disease process Drug Design: Structure of disease protein is very useful 7 Protein Structure and Motions: Protein-Drug Interaction Mechanism of Drug Action: A drug interferes with the function of a disease protein by binding to it. This interference stops the disease process Drug Design: Structure of disease protein is very useful 8 Protein structure and motions: Movie Show: Drug Binding Induced Conformation Change in Protein 9 Protein structure and motions: Movie Show: Protein transient opening for ligand or drug binding and dissociation: 10 Protein structure: Lowest Free Energy State Modeling of Protein Structure in Different Environment: Finding the global minimum free energy state Question: 1. No. of possible conformations of a protein. 2. Computing cost for searching these conformations 11 Structural Modeling: Basic Interactions and Their Models The stretching energy equation is based on Hooke's law. The "kb" parameter controls the stiffness of the bond spring, while "ro" defines its equilibrium length. 12 Structural Modeling: Basic Interactions and Their Models The stretching energy equation is based on Hooke's law. The "kb" parameter controls the stiffness of the bond spring, while "ro" defines its equilibrium length. 13 Structural Modeling: Basic Interactions and Their Models The bending energy equation is also based on Hooke's law 14 Structural Modeling: Basic Interactions and Their Models The bending energy equation is also based on Hooke's law 15 Structural Modeling: Basic Interactions and Their Models The torsion energy is modeled by a simple periodic function Why? 16 Structural Modeling: Basic Interactions and Their Models Torsion energy as a function of bond rotation angle. 17 Structural Modeling: Basic Interactions and Their Models The non-bonded energy accounts for repulsion, van der Waals attraction, and electrostatic interactions. 18 Structural Modeling: Basic Interactions and Their Models • van der Waals attraction occurs at short range, and rapidly dies off as the interacting atoms move apart. • Repulsion occurs when the distance between interacting atoms becomes even slightly less than the sum of their contact distance. • Electrostatic energy dies out slowly and it can affect atoms quite far apart. 19 Structural Modeling: Basic Interactions and Their Models Hydrogen Bond: N-H … O N-H … N O-H … N O-H … O Modeled by VdW+electrostatic Modeled by More potential 20 Structural Modeling: Basic Interactions and Their Models Complete Hamiltonian: p2 1 1 2 2 H k r (r req ) k ( ) eq atoms2m bond stretch 2 bond anglebending 2 vn [1 cos( n )] 2 bond rotation [V (1 e H bond 0 [V (1 e S bond a ( r r0' ) 2 ) V0 ] nonbonded a ( r r0' ) 2 ) V0 ] 0 [ Aij 12 ij r Bij 6 ij r qi q j ij rij ] Structural Modeling: Basic Interactions and Their Models Concept of energy scale is Important for molecular Modeling 22 Structural Modeling: Basic Interactions and Their Models Concept of energy scale is Important for molecular modeling 23 Structural Modeling: Basic Interactions and Their Models Sources of force parameters: Bonds, VdW, Electrostatic (for amino acids, nucleotides only): • AMBER: J. Am. Chem. Soc. 117, 5179-5197 • CHARMM: J. Comp. Chem. 4, 187-217 H-bonds (Morse potential): • Nucleic Acids Res. 20, 415-419. • Biophys. J. 66, 820-826 p2 1 1 H k r (r req ) 2 k ( eq ) 2 atoms2m bond stretch 2 bond anglebending 2 vn [1 cos( n )] 2 bond rotation [V (1 e H bond 0 [V (1 e S bond a ( r r0' ) 2 ) V0 ] nonbonded a ( r r0' ) 2 ) V0 ] 0 [ Aij 12 ij r Bij 6 ij r qi q j ij rij ] Electrostatic parameters of organic molecules need to be computed individually by using special software (such as Gaussian) 24 Energy Landscape for DNA Base Flipping Movement Phys. Rev. E62, 1133-1137 (2000). 25 Structural Modeling: Basic Interactions and Their Models From structure (x,y,z coordinates) to energy function: rij=sqrt((xi-xj)**2+(yi-yj)**2+(zi-zj)**2) cos(theta_i)=(xj-xi)*(xk-xi)+(yj-yi)*(yk-yi)+(zj-zi)*(zk-zi))/(rij*rik)= Aij*Aik+Bij*Bik+Cij*Cik cos(phi)=[(Aik*Bkl-Bik*Akl)*(Aik*Bij-Bik*Aij)+ (Akl*Cik-Ckl*Aik)*(Aij*Cik-Cij*Aik)+ (Bik*Ckl-Cik*Bkl)*(Bik*Cij-Cik*Bij)]/(Pi*Pk) Pi=sin(theta_i) Pk=sin(theta_k) p2 1 1 H k r (r req ) 2 k ( eq ) 2 atoms2m bond stretch 2 bond anglebending 2 vn [1 cos( n )] 2 bond rotation Homework: derive or find formula for [V (1 e Xi=x(r,theta,phi) etc. H bond 0 [V (1 e S bond a ( r r0' ) 2 ) V0 ] nonbonded a ( r r0' ) 2 ) V0 ] 0 [ Aij rij12 Bij rij6 qi q j ij rij ] 26 Structural Modeling: Basic Interactions and Their Models Structural Modeling Method I: Conformation search: Phi -> Phi+dphi xi -> xi+dxi; yi -> yi+dyi; zi -> zi+dzi E -> E +dE All possible states can be explored Conformation space Energy landscape H p2 1 1 k r (r req ) 2 k ( eq ) 2 2 2 bond stretch bond anglebending 2m atoms vn [1 cos( n )] 2 bond rotation [V (1 e H bond 0 [V (1 e S bond a ( r r0' ) 2 ) V0 ] nonbonded a ( r r0' ) 2 ) V0 ] 0 [ Aij 12 ij r Bij 6 ij r qi q j ij rij ] Q: Can you write a simple conformation search program? 27 Structural Modeling: Basic Interactions and Their Models Structural Modeling Method II: Energy minimization: General methods in Numerical Recipes H p2 1 1 k r (r req ) 2 k ( eq ) 2 2 bond stretch bond anglebending 2 2m atoms vn [1 cos( n )] 2 bond rotation [V (1 e H bond 0 [V (1 e S bond a ( r r0' ) 2 ) V0 ] nonbonded a ( r r0' ) 2 ) V0 ] 0 [ Aij 12 ij r Bij 6 ij r qi q j ij rij ] Force guided approach: Initialize: xi -> xi+dxi Compute potential energy change: V -> V +dV Determine next movement: Fxi=-dV/dxi; Fyi=-dV/dyi; Fzi=-dV/dzi dxi=C*Fxi new xi=xi+dxi Energy minimization can only go down hill. Why? 28 Structural Modeling: Basic Interactions and Their Models H Structural Modeling Method III: Molecular Dynamics Simulation: p2 1 1 k r (r req ) 2 k ( eq ) 2 2 m 2 2 atoms bond stretch bond anglebending vn [1 cos( n )] 2 bond rotation [V (1 e H bond 0 [V (1 e S bond a ( r r0' ) 2 ) V0 ] nonbonded a ( r r0' ) 2 ) V0 ] 0 [ Aij 12 ij r Bij 6 ij r qi q j ij rij ] • Time-dependent motion trajectory based on laws of classical physics. • Advantage: "Accurate" dynamics. • Disadvantage: Short-time event only. • Application: "All purpose", most widely used approach. Curr. Opin. Struct. Biol. 6, 232 (1996). Detailed description of MD general theory 29 Structural Modeling: Basic Interactions and Their Models Structural Modeling Method III: Molecular Dynamics Simulation: p2 1 1 H k r (r req ) 2 k ( eq ) 2 atoms2m bond stretch 2 bond anglebending 2 vn [1 cos( n )] 2 bond rotation [V (1 e H bond 0 [V (1 e S bond a ( r r0' ) 2 ) V0 ] nonbonded a ( r r0' ) 2 ) V0 ] 0 [ Aij 12 ij r Bij 6 ij r qi q j ij rij ] 30 Molecular Dynamics Simulation Challenge: Time-scale gap Bio-events: 10-3~10s MD: 10-6s on 200-node parallel computer for 30aa peptide Gap: Need to increase computing speed by >>1000 Time-saving techniques in development: Technique Speed-up factor Reduction of degrees of freedom Parallelization Multiple time-step integration Deformation of interaction potential or increase space dimension Scaling of system parameters (T, mass, etc) Efficient search of nearest neighbors Miscellaneous tricks (Newton's 3rd law etc) up to 100 10~100 10~ 10~ 3~ 3 2 Curr. Opin. Struc. Biol. 7, 181 (1997) 31 CZ5225 Methods in Computational Biology Assignment 2 32