Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
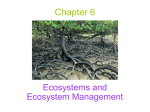
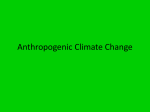
DOI: http://dx.doi.org/10.7551/978-0-262-32621-6-ch015 Ecosystem memory is emergent from local-level natural selection Daniel A. Power1 , Eörs Szathmáry2 and Richard A. Watson3 1 2 Institute for Complex Systems Simulation, University of Southampton, U.K. Center for the Conceptual Foundations of Science, The Parmenides Foundation, Germany 3 Natural Systems Group, University of Southampton, U.K. [email protected] Because the form of an ecosystem is shaped chiefly through the selection and amplification of chance genetic and environmental events at lower levels of organisation (sensu Maynard Smith and Szathmáry (1997)), the number of evolutionary outcomes for these systems is enormous. Theoretical models of ecosystem evolution and function generally show sensitivity to initial conditions and small disturbances that result in very different behaviours for mature systems (May, 2001). These non-linearities mean that ecosystem function is historically contingent; we observe path dependency (over evolutionary timescales) as well as those non-linearities (including hysteresis) that occur over ecological timescales. For researchers seeking to understand the degree to which ecosystem properties are the result of abiotic environmental conditions and the extent to which they are emergent from self-organisation (Levin, 1998), this contingency adds an additional intricacy: some ecosystem features may be a result of residual selforganisational responses to prior environmental conditions that are no longer active. We present a mathematical model in which an ecosystem of species, all at the same trophic level, compete for limiting resources according to Lotka-Volterra (LV) dynamics. In common with standard LV models, competition between species is modeled through interaction coefficients that summarise the extent to which species’ niches overlap (Pianka, 1974). We extend this framework by allowing evolutionary pressure to affect species resource utilisation profiles, such that natural selection alters the pattern of species nicheoverlap, with the result that interaction coefficients change over evolutionary timescales. We alternately expose this system to two configurations of environmental forcing, each of which favours certain species over others (through variation in environmental carrying capacities, Figure 1). In the case where niche-space is saturated, decreases in competition with one species can only be achieved through increases in competition with another and species are under greatest selective pressure to minimise competition with those species with which they co-occur at the highest densities. Figure 1: Schema of simulation showing key stages. An initial community of 232 species, X(0) is subjected to environmental conditions C1 (a pattern of differential carrying capacities). Ecological dynamics (Eco 1) are run until the system reaches an stable distribution of species densities (i.e. an attractor), at which point evolutionary effects are applied (Evo 1). The process is repeated for environmental conditions C2. As the distribution of carrying capacities in C1 and C2 is arbitrary, we have chosen patterns that correspond with two events that occur in alternate years. Under these conditions, ecosystems that are exposed to multiple patterns of environmental forcing develop attractors for these configurations even when environmental forcing is lifted (Figure 2b). This property enables the system to recover these specific configurations, even from initial conditions that are ambiguous compositions of both of the historically experienced environments (Figure 2c). We find that the longer that an ecosystem remains under any configuration of forcing: i) the greater the disturbance it can withstand when forcing is removed and still return to the same composition of species; ii) the speed at which the system recovers from a disturbance increases; and iii) the longer the system can spend evolving at another attractor before the current attractor is ’forgotten’. We recognise the presence of underlying organisational principles that enable these interesting system-level behaviours to emerge from local-level selection. We discuss how access to these principles has the potential to advance our understanding of ecosystem properties such as memory, robustness and resilience. ALIFE 14: Proceedings of the Fourteenth International Conference on the Synthesis and Simulation of Living Systems initial species densities final species densities (a) before evolution initial species densities final species densities initial species densities (b) after evolution (d) vector fields final species densities (c) after evolution (e) Evolution of new attractors Figure 2: (a) Before the evolution of ecological interactions (and in the absence of any ecological forcing) the system has a single attractor, where all species are at the same density. After evolution of ecological interactions under alternating forcing, the system is examined again without ecological forcing. Now the system has two attractors corresponding to the exact configurations of environmental forcing it has experienced, meaning the system will return to one of these attractors from any set of random initial conditions (b) and even return to the nearest one of these attractors from initial conditions representing compositions of both the forcing patterns (c). These attractors are created as the system undergoes a fold bifurcation. The system’s response to forcing is initially linear ((d): first row of panels). After an intermediate period of evolution ((d): middle row) the system’s response to forcing is non-linear and the species densities develop increasing ’switch-like’ convergence to the two attractors. At the final stage of system evolution ((d): last panel) ecological forcing is insufficient to move the system out its current attractor. (e) Monte Carlo analysis shows emergence of the two attractor state at around generation 1050. References Levin, S. A. (1998). Ecosystems and the biosphere as complex adaptive systems. Ecosystems, 1(5):431–436. May, R. M. (2001). Stability and complexity in model ecosystems, volume 6. Princeton University Press. Maynard Smith, J. and Szathmáry, E. (1997). The major transitions in evolution. Oxford University Press. Pianka, E. R. (1974). Niche overlap and diffuse competition. Proceedings of the National Academy of Sciences, 71(5):2141–2145. ALIFE 14: Proceedings of the Fourteenth International Conference on the Synthesis and Simulation of Living Systems