Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Density of states wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Old quantum theory wikipedia , lookup
Photon polarization wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Thermodynamic system wikipedia , lookup
Gibbs free energy wikipedia , lookup
Internal energy wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Hunting oscillation wikipedia , lookup
Heat transfer physics wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Classical central-force problem wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
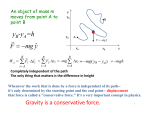
Conservation of Angular Momentum • Definitions: Since Consider Note Thus Conclusion: r r Lrp r r N r F r F mv& angular momentum moment of Force (torque) r r N r mv& d r r r r r r L r p L r& p r p& dt r r r r r r p r& mv r& mr& 0 r r& r Lr pN r r& r if N=0, then L=0, implies L = constant. The angular momentum of particle subject to no torque is conserved. Work • Definition (Just a reminder…) 2 r r W12 Fgdr 1 2 F r dr 1 Kinetic Energy • To motivate the concept, consider: r r r m d 2 m d r r dv dr r dv r v dt Fgdr m g dt m gvdt vgv dt 2 dt 2 dt dt dt dt r d mv 2 Fgdr dt dt 2 The work, W, can thus be expressed as an exact differential. 2 r r 2 2 1 W12 Fgdr 2 mv 12 m v22 v12 1 T2 T1 1 Ti 12 mvi2 Definition of Kinetic Energy Conservative Forces If the work performed by a force while moving a particle between two given (arbitrary) positions is independent of the path followed, then the work can be expressed as a function of the two end points of the path. 2 r r W12 Fgdr U1 U 2 1 Conservative Force or system • Where we defined the functions Ui as the potential energy of the particle at the location i. 2 • Note the signs r r W12 Fgdr U 2 U1 U 1 Conservative Forces (cont’d) • A force is conservative if it can be expressed a the gradient of a scalar function U. r F gradU U Verify by substitution: 2 r 2 r r r W12 Fgdr Ugdr dU U1 U 2 2 1 1 1 In most systems of interest,U is a function of the position only, or position and time. We will study central potentials in particular, and we will not consider potentials that depend on velocity. Conservative Forces (cont’d) • Important notes about potentials. – Potentials are defined only up to a r r “constant” since U constant U Potentials are known relative to a chosen (arbitrary) reference. Choose reference position and values to ease the solution of specific problems. E.g. for 1/r potentials, choose U=0 at infinity. Conservative Forces (cont’d) • Potential energy is thus NOT an absolute quantity: it does not have an absolute value. • Likewise, the Kinetic Energy is also NOT an absolute quantity: it depends on the specific rest frame used to measure the velocity. Total Mechanical Energy • Definition: E = T + U. • It is a conserved quantity! • To verify, consider the time derivative: Recall Thus r Fgdr d( 12 mv 2 ) dT r r dT Fgdr r r Fgv dt dt dE dT dU dt dt dt The time derivative of the potential can be expressed as a sum of partial derivatives. dU U dxi U dt t i xi dt Total Mechanical Energy (cont’d) r U U r& U dU U dxi U x&i U gr t t dt t i xi i xi dt • So adding the 2 terms… r r r dE dT dU r r r U r U Fgv U gv F U gv dt dt dt t t =0 Conclusion: if U is not an explicit function of time, then the energy is conserved! dE U dt t Total Mechanical Energy (cont’d) • In a conservative system, the force can be expressed as a function of a gradient of a potential independent of time. – The total mechanical energy, E, is thus a conserved quantity in a conservative system. • The conservations theorem we just saw can be considered as laws, but keep in mind they strictly equivalent to Newton’s Eqs 2 & 3. • Conservations theorems are elegant, and powerful. – They led W. Pauli (1880-1958) to postulate (in 1930) the existence of the neutrino, as a product of b-decay to explain the observed missing momentum! Example: Mouse on a fan • • Question: A mouse of mass m jumps on the outside of a freely spinning ceiling fan of moment of inertia I and radius R. By what ratio does the angular velocity change? Answer: – Angular momentum must be conserved. – Calculate the angular momentum before and after the jump. – Equate them. I I before Lbefore I before before Lafter I after after Lafter Lbefore after I before I before I after I mR 2 before after after after I before before I after Energy • Concept of energy now more popular than in Newton’s time… • Became clear early 19th century that other forms of energy exist: e.g. heat. • Rutherford discovered clear link between heat generation and friction. • Law of conservation of energy first formulated by Hermann von Helmholtz (1821-1894) based on experimental work done largely by James Prescott Joule (1818-1889). Use of Energy for problem solving. • Total mechanical energy: 1-D Case: v(x) E T U 12 mv 2 U(x) dx 2 E U(x) dt m x t to xo dx 2 E U(x) m with x=x o This is a “generic” solution: need U(x) and integrate to get a function of t(x)... Energy (cont’d) • • Can learn a great deal without performing the integration (which can get difficult…). Consider a plot of the energy and potential vs x. T 12 mv 2 0 E4 E3 E U(x) for any real solution. E=E4 - unbound motion E=E3 - 1 side bound, non periodic E2 E=E2 - bound periodic motion E1 E=E1 - bound periodic motion E0 x Energy (cont’d) • Note: Whenever motion is restricted near a minimum of a potential, it may be sufficient to approximate U(x) with a harmonic potential approximation U(x) 12 k(x xo )2 U(x) E Stable/Unstable equilibrium • One can determine whether an equilibrium is stable or unstable base on the curvature of the potential at the equilibrium point. U(x) U(x) E E unstable stable Consider a Taylor expension of the potential: x 2 2U(x) x 3 3U(x) U(x) U(x) U(xo ) x L x x xo 2! x 2 x x 3! x 3 x x o o Stable/Unstable equilibrium (cont’d) • We have an equilibrium if: Near xo: dU(x) 0 dx xo x 2 2U(x) x 3 3U(x) U(x) U(xo ) L 2 3 2! x x x 3! x x x o o Stable equilibrium if: 2U(x) 0 x 2 x xo Unstable equilibrium if: 2U(x) 0 x 2 x xo Higher orders to be considered if: 2U(x) 0 x 2 x xo





























![An FGF4-FRS2[alpha]-Cdx2 Axis in Trophoblast Stem Cells Induces](http://s1.studyres.com/store/data/004612399_1-b568e9f7ef7ac5f7304ea5d975b0dd52-150x150.png)