Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
INTRODUCTION TO
CAMOUFLAGE AND
DECEPTION
INTRODUCTION TO
CAMOUFLAGE AND
DECEPTION
JV Ramana Rao
Director (Retd)
Defence Laboratory
Jodhpur
DEFENCE RESEARCH & DEVELOPMENT ORGANISATION
MINISTRY OF DEFENCE
NEW DELHI 1 1 0 01 1
-
1999
DRDO Monographs/ Special Publications Series
INTRODUCTION TO CAMOUFLAGE AND DECEPTION
JV Ramana Rao
Series Editors
Editor-in-Chief Associate Editor-in-Chief
M Singh
SS Murthy
Editor
DS Bedi
Asst Editor
A Saravanan
Production
Printing
SB Gupta
SK Tyagi
Cover Design
SK Saxena
Associate Editor
Ashok Kumar
Marketing
RK Dua
O 1999, Defence Scientific Information & Documentation Centre
(DESIDOC),Defence R&D Organisation, Delhi-110 054.
All rights reserved. Except a s permitted under the Indian Copyright
Act 1957, no part of this publication may be reproduced, distributed
or transmitted, stored in a database or a retrieval system, in any
form or by any means, electronic, mechanical, photocopying,
recording, or otherwise, without the prior written permission of the
Publisher.
The views expressed in the book are those of the author only. The
Editors or Publisher do not assume responsibility for the statements/
opinions expressed by the author.
ISBN: 81-86514-02-7
Printed a n d published by Director, DESIDOC,Metcalfe House, Delhi-1 10 054.
CONTENTS
Preface
Acknowledgements
CHAPTER 1
INTRODUCTION
CHAPTER 2
MODERN MILITARY TECHNOLOGY AND ITS FUTURE
TRENDS
2.1
Introduction
2.2
2.2.1
2.2.2
2.2.3
2 2.4
Land Warfare
Main Battle Tank
The Infantry
The Artillery
Role of Air Defence
2.2.5
Nuclear, Biological and Chemical Warfare
Surveillance and Target Acquisition Systems
Command, Control and Communication (C3)
Air Warfare
Air Defence
Aircraft Survival in the Enemy's Airspace
Combat Aircraft and Weapons
Future Air Warfare
Naval Warfare
Submarines
Antisubmarine Warfare
Future Trends
CHAPTER 3
CAMOUFLAGE IN NATURE
3.1
c3.2
3.2.1
3.2.1.1
Introduction
Concealment
Colour Matching
Variable Colour Resemblance
Studies on Animal Colouration
Countershading
Disruptive Colouration
Shadow Suppression
Role of Concealing Colouration
Concealment in Offence
Studies on Concealing Colouration
Advertisement
The Warning Colouration
Disguise
Resemblance to Objects in the Background
Diverting Attention to Non-vital Part
Mimicry
Other Forms of Camouflage
Camouflage in Plants
Evolution of Camouflage
Conclusion
CHAPTER 4
VISUAL CAMOUFLAGE
4.1
Introduction
41
4.2
Visual Camouflage
41
4.3
The Human Eye
41
4.3.1
Visual Acuity
43
4.3.2
Dark and Light Adaptations
43
4.4
Characteristics of Light Relevant to Visual Camouflage
45
4.4.1
Colour
45
4.4.1.1
Geometrical Representations of Surface Colours
in Terms of Lightness, Hue and Saturation
46
4.4.1.2
Measurement of Colour
46
4.4.2
Texture
47
4.4.3
Brightness (Contrast)
47
4.5
Sensors in the Visible Region
48
4.5.1
Electrooptical Instruments
4.5.1.1
Image Intensifiers
4.5.1.2
Low Light Level Television
Lasers
Rangefinding
Target Designation
Target Illumination
Tracking
Photography
Platforms
Photo-reconnaissance - Aerial
Factors Affecting Photographic Reconnaissance
Aerial Camera
Advantages/disadvantages of Photographic
Reconnaissance
T V Cameras
Optical Mechanical Scanners
Linear Imaging Self-scanning Sensor (LISS)
Military Satellites
Factors Affecting Recognition in the Visible Region
Shape
Size
Colour
Texture
Shadow
Pattern
Site
Association
Basic Principles of Camouflage in the Visible Region
Hiding
Arboriculture in Desert Region
Screens
Obscurants (Smoke Screens)
Blending
Colour Matching
Countershading
Disruptive Colouration
Shadow Elimination
Deception
Camouflaging of Military Objects by Disruptive
Pattern Painting
Studies on Disruptive Pattern Painting
Dual Texture Gradient Pattern Paintings (DTG)
Computerised Generation of Disruptive Patterns
Camouflaging by Nets
Properties of Net Materials
Applications of Nets
Manufacturers of Nets
Psychological Camouflage
Neurophysiological Principles of Visual Perception
Studies on Target Characteristics and Target
Context on Detection
Psychological Studies Related to Camouflaging of
nfilitary Objects
Miscellaneous Camouflage Devices
Foams
Reflectance Camouflage
Antishine Devices
Vehicle Track Erasers
Computer-based Evaluation of Camouflage
New Areas of Visual Camouflage
Metarners
Spectral Camouflage
CHAPTER 5
INFRARED CAMOUFLAGE
Introduction
What is Infrared Camouflage?
Infrared Radiation
Sources of Infrared Radiation
Natural Sources
Man-made Sources
Carbon Arc
Tungsten Lamp
Xenon Arc Lamp
Laser
Nernst Glower
Globar
Terminology
Radiant Energy (U)
Radiant Flux or Radiant Power (P)
Radiant Emittance (W)
Radiant Intensity (J)
Radiance (N)
Radiant Photon Emittance (Q)
Irradiance (H)
Spectral Radiant Flux (P, )
Radiant Emissivity (E)
Radiant Reflectance (p)
Radiant Absorptance (a)
Radiant Transmittance (T)
Laws Governing Radiation Emitted by Heated Objec
Kirchhoff s Law
Stefan-Boltzmann's Law
Wien's Displacement Law
RayleighJeansJ Law
Planck's Law
Properties of Infrared Radiation
Propagation Characteristics
Extinction Coefficient
Atmospheric Windows
Emissivity
Measurement of Infrared Emissivity
Ernissivity and Temperature Effects on Contrast
Relative Effects of Temperature and Emissivity
Differences on Radiant Flux Per Unit Area
Infrared Sensors
Pre- World War I1 Scenario
Post- World War I1 Scenario
Principle of an Infrared Sensing System
Classification of Infrared Sensing Systems
Infrared Detectors
Thermal Detectors
Quantum Detectors
Far Infrared Materials
General Discussion on IR Detector Materials
Performance Characteristics of a Detector
Noise Equivalent Power (NEP)
Detectivity (D)
Infrared Sensing System
Infrared Telescope
Vidicon
Photothermionic Image Converter
Infrared Photography
Evaporograph
Thermal Imaging System
Basic Elements of a Thermal Imaging System
Objective Lens System
Optomechanical Scanner
Detector Bank
Electronic Signal Processing and Display
Performance Characteristics
Applications of Thermal Imaging System
Land Applications
Air-borne Applications
Sea Applications
Manufacturers
Differences Between Thermal Imaging System
and Image Intensifier
Future Trends
General Considerations Concerning IR Operations
with Thermal Imaging Systems
Image Processing
Single-element Scan
Multi-element Scan
Parallel-Scan
Serial-parallel Scan
Focal-plane Processing Arrays (FPAs)
Staring Arrays
Schottky Barrier FPAs
Charge Transfer Device Focal Planes
IR Signatures of Military Objects and Backgrounds
IR Signature of Aircraft
IR Signature of Ship
IR Signature of Tank
IR Signature of Personnel
IR Signature of Backgrounds
Thermal Scenes - Characterisation of
Backgrounds
Scene Objects
Computer Generated Imagery
Components of Synthetic Scenes
Paradigm for IR Synthetic Image Generation
IR Signature Suppression (IRSS) of Warships
Spectral Characteristics of IR Signature(s) of Ships
IR Signature Suppression
The Dres Ball
The Eductor Diffuser
IR Signature Suppression of Aircraft
Suppression of Plume Signature
Suppression of the Signature of Hot Parts
Suppression of Signature of Aircraft Body
Suppression of Signature of Unresolved Aircraft
IR Signature Suppression of Tank
Passive Countermeasures
Reactive Countermeasures
Signature Suppression of Ground Objects
Suppression of Signature of Non-hardware
Thermal Camouflage Equipment and Materials
Disruptive Patterns
Camouflage Screens
Thermal Blankets or Tarps
CHAPTER 6
MICROWAVE CAMOUFLAGE
Introduction
What are Microwaves?
Properties of Microwaves
Microwave Spectrum
Radar Frequencies
Historical Development of Microwaves
Generation of Microwaves
Microwave Vacuum Tube Devices
Applications of Microwave Tubes
Microwave Solid State Devices
Microwave Sensors
Principle of Radar
Historical Development of Radar
Radar Equation
Typical Radar
Types of Radars
Continuous Wave (CW) Radar
Frequency Modulated Continuous Wave (FM-CW)Radar
Pulse Doppler Radar and Moving Target Indicater (MTI)
Tracking Radar
Side Looking Air-borne Radar (SLAR)
Synthetic Aperture Radar (SAR)
Millimeter Wave Radar
Role of Radar in War
Types of Radars Used in War
Battlefield Surveillance Radar (BSR)
Weapon Locating Radar (WLR)
Air Defence Radar (ADR)
Other Types of Radar
Radar Cross Section (RCS)
Expression for RCS
Methods for the Prediction of RCS
RCS of Flat Plate
RCS of Re-entrant Bodies (Corner Reflectors)
20 1
General Discussion on RCS of Simple Bodies
203
RCS of Military Objects
RCS of Aircraft
RCS of Ship
RCS of Tank
203
203
203
207
Advantages a n d Disadvantages of Prediction Techniques 207
RCS of Targets - Experimental Determination
208
Outdoor Ranges
209
Indoor Ranges
Methods for Reduction of RCS
210
210
Shaping
B-2 Bomber and F- 117A Fighter
21 1
212
Ship
Radar Absorbing Materials (RAMS)
2 12
2 13
Theory
Practical Radar Absorbing Materials
2 14
2 14
Types of Radar Absorbing Materials
215
Salisbury Screen
215
McMiIian Absorber
216
Dallenbach Layer
Jaumann Absorber and Graded Dielectric Absorber
218
218
Magnetic Absorber
Radar Absorbing Structures (RAS)
2 19
22 1
Circuit Analog Absorbers (CAs)
222
R-cards
223
Passive Cancellation
Active Cancellation
Current Research on Radar Absorbing Materials
224
224
224
CHAPTER 7
DECEPTION
7.1
7.2
7.3
7.4
Introduction
What is Deception ?
Disinformation
Psychological and General Aspects of Deception
229
23 1
231
232
7.5
Deception Equipment
7.5.1
Dummies
7.5.2
Decoys
7.6
Candidates for Dummies and Decoys
7.6.1
Criteria for Selection
7.6.2
General Criteria
7.6.3
Sensor-specific Criteria
7.7
Background for a n Effective Deception Strategy
7.8
Dummies/Decoys of Military Objects
Dummies and Decoys of Visible Region
7.8.1
7.8.2
Decoys (IR & Radar)
7.8.2. I
Chaff Decoy
7.8.2.2
Infrared Flares
7.9
Various Decoys (Published in Literature)
CHAPTER 8
MATERIALS FOR CAMOUFLAGE APPLICATIONS
Introduction
Radar Absorbing Materials (RAMS)
Magnetic Materials
Dielectric Materials
Artificial Dielectrics
Conducting Polymers
Chiral and Two-dimensional Polymers
Schiff Base Salts
Infrared Camouflage Materials
Physical Principles
Attenuat~onof Infrared Signatures
Obscuration
Surface Treatment
Coating Materials for Camouflage in Infrared Region
Coating Materials for Camouflage in Visible Region
Paints
Pigments for Forest and Jungle Areas
Pigments for Desert Regions
Pigments for Ocean Environment
8.4.2
8.4.4
8.4.5
8.5
8.5.1
8.5.2
8.5.3
8.6
8.7
Antireflective Coatings
Aqueous Foam
Smoke
Nets
Materials for Multispectral Camouflage
Surface Coatings
Composites
Multispectral Camouflage Nets
Materials for Acoustic Camouflage
Futuristic Camouflage Materials
8.7.1
8.7.2
8.7.3
Chromogenic Materials
Luminescent Materials
Polymers and Composites
8.4.3
CHAPTER 9
STEALTH TECHNOLOGY
Introduction
What is Stealth?
Historical Background of Stealth Technology
Military Objects Requiring Stealth
Stealth Aircraft
LockheedJAirforce F- 1 17A
Constructional Details of F-117A
NorthropJBoeing B-2 Advanced Technology
Bomber (ATB)
Stealth Warships
Acoustic Signature
Radar Cross Section
Infrared Signature
Magnetic Signature
Electric Signature
Other Signatures
Stealth Tank
Stealth Submarine
Stealth Helicopter
Stealth RPVs
9.11
Stealth Missiles
312
9.12
Airship
312
CHAPTER PO
R&D WORK ON CAMOUFLAGE AND DECEPTION IN DRDO 3 1 5
10.1
Introduction
10.2
10.3
10.4
10.5
10.6
Visual Camouflage
Infrared Camouflage
Microwave Camouflage
Multispectral Camouflage Materials
Naval Camouflage
Force Multipliers
10.7
CHAPTER 11
CONCLUSION
Appendix - A
Appendix - B
Index
PREFACE
This introductory book on camouflage and deception is
primarily intended for dissemination of knowledge and information
in the field. The subject is a military science that has no counterpart
in the civil sector, and a s such, no university teaches and gives
degrees in the field.
Camouflage and deception is an integral part of nature. For
self-preservation,which is the central problem of biological evolution,
all animals, small and big, both in offence and defence, adopt
strategies and counterstrategies. These very principles significantly
form the basis of camouflage in war. The means adopted by animals
in nature have bewildering diversity and complexity all of which do
not seem to have counterparts or could be duplicated even in the
modern war of today. One typical example is that of the chameleon
which almost instantaneously changes its colours in order to blend
with its background. A s yet, there does not seem to be any means
in the present day war by which a military vehicle can change its
colour automatically in order to blend with the background, as it
moves from one background to another.
The field of camouflage and deception was existing more as a
military art than science, until and during World War 11. Since then,
it has developed into a science. The field is inter-disciplinary and
draws knowledge from several branches of science and engineering.
The stealth technology, of the modern war of today, which greatly
enhances the combat survivability of a fighter aircraft or bomber in
the enemy's territory is a complex synthesis of several technologies.
The rapid advancements that have been taking place in military
sensor technologies, in turn, demand more and more sophisticated
countermeasures. This is a war between the strategies and
counterstrategies.
Countermeasures, signature s u p p r e s s i o n / s i g n a t u r e
management, stealth, low observables: these are the modern terms
being employed in place of the classical terminology - camouflage,
concealment and deception. The author, however, has entitled this
book in the classical terminology.
This book has been written in eleven chapters based on the
information available in open literature. Chapter 1, starting with the
origin of camouflage, provides an introduction to the field. Chapter 2
provides glimpses of modem military technology and its future trends.
This has been introduced in order to have a better appreciation of
the importance of countermeasures in war. Chapter 3 deals with
camouflage in nature. This provides the basic concepts of camouflage.
Chapter 4 covers camouflage in the visible region. Camouflage in
war started with ways and means to defy detection by the human
eye. Before dealing with the different techniques of visual camouflage,
the various sensors that are used in the visible region of the
electromagnetic spectrum are briefly described. Chapter 5 starts with
the basics of infrared radiation, then discusses the infrared sourcesnatural and man-made, infrared sensors and imaging systems, and
infrared signatures of major military targets. Then the various infrared
countermeasures are dealt with. Chapter 6 deals with basics of
microwaves-generation, properties, microwave sensors, different types
of radars, radar cross-section and its prediction and measurement,
RCS of major military objects - aircraft, ships and tank, radar
absorbing materials and paints, and RCS reduction methods. Chapter
7 briefly touches upon the role of deception in war in general and
deception equipment in particular. Chapter 8 deals with camouflage
materials for suppression of signatures in visible, infrared and
microwave regions, including signatures of non-electromagnetic
nature such a s acoustic. Chapter 9 briefly touches upon stealth
technology - its history, and its application to major military platforms.
Chapter 10 gives a brief account of some aspects of research and
development activities in the field carried out in DRDO laboratories.
Chapter 11 summarises the various facets of the field and future
trends.
The technologies associated with target acquisition are rapidly
advancing. New tools, such as artificial intelligence, neural networks,
pattern recognition and automatic target recognition, may further
enhance sensor capabilities. These might lead to counterstealth
technologies demanding counter-counterstealth measures.
The entire approach towards the field must be viewed from
the scenario mentioned above. The field has to counter more
challenges in future.
Hyderabad
February 1999
J V RaMANA RAO
ACKNOWLEDGEMENTS
At the outset I would like to express my deep sense of
gratitude to Dr APJ Abdul Kalam, SA to the Minister of Defence and
Director General DRDO, Government of India, who has been the
driving force behind this task and who has given me this assignment.
I would also like to express my grateful thanks to Shri A Nagaratnarn,
former Director, Defence Laboratory, Jodhpur (DW), for going
through the manuscript of the book and providing several valuable
suggestions.
I have been greatly helped by Defence Research a n d
Development Laboratory (DRDL), Research Centre Imarat (RCI),
Defence Metallurgical Research Laboratory (DMRL), Hyderabad;
Aeronautical Development Establishment (ADE), Electronics and
Radar Development E s t a b l i s h m e n t (LRDE), Aeronautical
Development Agency (ADA), and Centre for Artificial Intelligence
and Robotics (CAIR), Bangalore; Research and Development
Establishment (Engineers) (R&DE Engineers)), Armaments
Research and Development Establishment (ARDE), Institute of
Armament Technology (IAT), High Energy Materials Research
Laboratory (HEMRL),and College of Military Engineering (CME),
Pune; Defence Materials and Stores Research and Development
Establishment (DMSRDE), Kanpur; Instrument Research and
Development Establishment (IRDE), Defence Electronics
Applications Laboratory (DEAL),Dehradun; Defence Science Centre
(DSC),Solidstate Physics Laboratory (SPL),and Defence Scientific
Information and Documentation Centre (DESIDOC), s el hi; and
Combat Vehicles Research a n d Development Establishment
(CVRDE), Chennai, in extending library facilities, through Xerox
copies of articles and papers published in open literature. I express
my sincere thanks to the Directors of all these laboratories.
I take this opportunity to thank Prof J Srihari Rao, Regional
Engineering College, Warangal, for his support in the preparation
of material pertaining to generation of microwaves and radars; Prof
Raghavendra Gadagkar, Indian Institute of Science (IISc),Bangalore;
Prof J Sobhanadri and Prof VRK Murthy, Indian Institute of
Technoloo (IIT), Chennai for their valuable suggestions and
discussions.
I gratefully acknowledge the support provided by Dr AR Reddy,
former Director, DW for extending every type of facility that I have
asked for and to Dr SS Murthy, Director, DESIDOC and Dr Ramesh
Kumar, Director of Materials, and their colleagues for their support
and valuable suggestions.
It is a great pleasure to acknowledge the excellent support
provided by Dr N h m a r , and Dr SR Vadera, DM, in writing the
chapter on Materials for Camouflage Applications. But for their
support, it would have been difficult for me to do justice to this
chapter. I would also like to express my sincere thanks to Shri Anil
Das, DW, for his assistance in writing the chapter on Deception.
I take this opportunity to thank Shri P Rama Seshu, Dr
Krishna Kumar, Shri SN Puspak, Shri Ramesh Chandra Saxena,
Shri BL Soni and Shri N Bohra, my ex-colleagues in DW, for the
services rendered by them.
I gratefully acknowledge the support provided by Dr Kartikeya
V Sarabhai, Director, Centre for Environment Education (CEE),
Ahmedabad. I would also like to place on record my sincere thanks
and appreciation to Smt Meena Raghunathan, Programme
Coordinator; Shri Mukesh Barad, Artist; and Shri DM Thumber,
Artist of CEE for their excellent work in the preparation of some of
the illustrations of the Chapter - Camouflage in Nature.
I would like to place on record my sincere thanks and
appreciation to Shri MS Verma, Shri RP Sharma, Shri Virendra
Vikram and Shri Mangi La1 for preparing drawings of figures; to
Shri Madho Singh and Rajender Vimal for preparing colour
transparencies; and to Shri ML Choudhary, Shri BT Mathai, Shri M
R Pate1 and Shri Ajay Singh, of DW, f ~ the
r excellent assistance
provided by them in word processing.
J V Ramana Rao
CHAPTER 1
INTRODUCTION
The word 'camouflage7h a s its origin in the French word
camoufler which means 'to disguise7'. When the word entered the
English dictionary initially, it had a limited meaning, implying
concealment or disguise of military objects in order to prevent
detection by the enemy. The only sensor available in the early days
was the human eye. The means to camouflage a military object
were foliage and other locally available material.
The concept of camouflage is a s old a s nature, and it has been
an integral part of it. All animals, small and big, are found to employ
several methods of concealment and disguise for self-preservation,
both in defence and offence. Practically no animal is safe, since for
every animal there is a predator. Both the predator and the prey
have to adopt strategies for their survival. Thus there is a n
evolutionary arms race between different species and also within
the same species. In the progress of biological evolution, both the
predators and the prey have to constantly and equally improve their
strategies and then pass them from generation to generation2s3.In
the arms race in nature there exists a bewildering diversity in the
strategies and counterstrategies adopted by different animals. All
these techniques may be termed as camouflage and deception in
nature2r3.Although there may not be a counterpart in the present
day arms race to each and every strategy adopted by animals in
nature, these very principles, by and large, form the basis of
camouflage in war. Whether it is concealment or disguise, deception
is inherent in all the methods.
Human civilization, beginning with primitive man, has been
using camouflage, concealment and deception in various forms for
different purposes, particularly in wars. The basic philosophy
remaining one and the same, the changes that have come are in the
methodology of application and the levels of sophistication.
Several examples can be cited from ancient wars in which
camouflage was extensively utilised with great advantage. The
2
Introduction to Camouflage and Deception
German legend4 "The Nibelungenlied" describes the camouflaging
cap, the 'Tarnkappe'. Siegfried wins the cap from the dwarf king
Alberich. The cap makes him invisible. It makes him defeat
Brunhilde, the Queen of Iceland, in battle. The
could not
conquer Troy for ten years, not until they employed a ruse-the
wooden Trojan horse. The Greeks hid themselves in its belly. The
horse was pulled inside the city by the Trojans which led to the
conquer of Troy. The use of twigs and leaves on the caps and moving
under natural cover by Genghis Khan's mounted mongols, and
leaving of camp fires burning by George Washington after departing
from the camp, are but a few examples where last minute decisions
on camouflage measures had changed failures to successes.
Camouflage was employed by the French army during World
War I in order to prevent detection of guns and vehicles from the
enemy's observation5. Camouflage which was existing more a s a
military art became a science during World War 11. At that time a
wide range of military objects, such a s individual soldiers, guns,
vehicles, tanks, airfields and shipyards, needed protection against
aerial observation through naked eye and aerial photographs6. This
provided the impetus to develop the field of camouflage and deception
on scientific lines. Even during World War 11, the field was essentially
confined to the ways and means to disguise military objects against
human observation, i.e. camouflaging of military objects against
sensors which were available in the visible region. Technological
advances in the field of remote sensing covering a wide range of the
electromagnetic spectrum have in turn demanded equivalent
countermeasures.
Prior to World War 11, camouflaging of military objects against
sensors employed in the infrared region of the electromagnetic
spectrum did not seem to have been employed, a s no such sensors
were available. In the subsequent wars, such a s in the Vietnam
War, new detectors beyond the visible region of the electromagnetic
spectrum came into use. The need for camouflaging military objects
beyond the red end of the visible region had arisen with the
development of infrared false colour photographic film during World
War I1 which provided an impetus for research and development in
the field of infrared radiation. Since then, the field has seen rapid
growth, in particular in the area of military reconnaissance,
surveillance and target acquisition. This in turn has put great stress
on countermeasures to defy detection by infrared systems. Thus
progress in the field of infrared engineering became synonymous
with the development of military infrared7. Much of the work done
in the field was classified and not available in open literature. The
field of infrared camouflage known under different names - infrared
Introduction
countermeasures, infrared signature suppression, etc - has become
vital to the success of any military operations in the various theatres
of war - the land, the air and the sea.
Radar had played a very important role in World War I1 when
several developments took place in radar technology in US, Britain
and Germany. This i n t u r n h a d p u t a great s t r e s s on r a d a r
countermeasures - a modern name for microwave camouflage. The
major military objects which need microwave camouflage are the
fighter aircraft, the naval warship and the tank. These objects can
be detected by t h e i r d i s t i n c t microwave s i g n a t u r e s . T h e
countermeasures involve suppression of these signatures. The
microwave signature of a military object is known today as its radar
cross-section (RCS). Thus the problem of microwave camouflage is
one of reducing RCS of military objects of interest to such a n extent
that the object escapes detection by radar. All military objects do
not require microwave camouflage. Only those objects which come
under the influence of radar threat are the candidates for microwave
camouflage.
The development of radar is synonymous with the development
of microwave e l e c t r o n i c s . T h e r e have b e e n t r e m e n d o u s
advancements in radar technology in the post-World War I1 period.
Developments such a s digital signal processing and phased array
antennas have greatly enhanced radar capabilities. All these
developments will continue to demand radar countermeasures.
Throughout history, besides the conventional methods of
camouflage, deception h a s been employed simultaneously as a force
multiplier and to enhance combat survivability. Application of
deception techniques in all their subtlety and sophistication peaked
during the 1991 Gulf War. The technically developed and heavily
resource-backed Allied Forces brandished advanced decoys and
deception equipment. The Iraqis effectively displayed deception by
relatively simpler techniques8-lo. In many situations, camouflage
combined with deception would be more effective. In some cases, it
is deception equipment alone that can meet the requirement.
Camouflage is concerned with the suppression of signature(s)which
the military object may have by which it may be detected. Deception
is concerned with simulation of the concerned signature(s).Increase
in the signal-to-noise ratio increases detectability of the object by
the sensor concerned. Increase in the noise-to-signal ratio increases
the degree of camouflage. The objective of various camouflage
methods is to increase noise-to-signal ratio.
The technological explosion of the 20th century - in the fields
of electronics, computer revolution, materials research, a n d sensor
3
4
Introduction to Camouflage and Deception
technology have brought in unimaginable advances in military
hardware, weapons, weapon controls, and delivery systems, mobility,
reconnaissance, surveillance and target acquisition systems.
Simultaneously, along with these developments, the role of
countermeasures has become increasingly important, demanding
improvements in the existing countermeasures and development of
new methods and techniques.
The conventional methods of camouflage and deception are no
longer adequate in the present-day advanced technology warfare
scenario. The field has acquired new dimensions under the names
such a s stealth technology, low observable technology, very low
observable technology, or signature management. In this context, the
conventional methods of camouflage, concealment and deception serve
only the preliminary stages. The concept of multispectral/ polyspectral
camouflage under the name stealth technology h a s to embody
countermeasures to detection by radar, infrared, visible and acoustic
sensors and any other sensor that may be employed. Stealth or low
observable technology as applied to a weapon platform such as a combat
aircraft considers several aspects of the design right from inception
with the primary objective of incorporating low observable features
without affecting the performance of the aircraft".
REFERENCES
1.
2.
3.
4.
5.
6.
7.
8.
9.
Hinkle, C. W. The Encyclopedia Americana. The International
Reference Work. Americana Corporation, Washington DC,
1958. p 268-70.
Owen, D. Camouflage and mimicry. Oxford University Press,
1980.
Cott, H. B. Adaptive coloration in animals. Methuen & Co.
Ltd. London, 1966.
Jurgen Erbe. Thoughts on camouflage and deception. Milita y
Technology. 1987, XI(9),85-87.
Now you see me, now you don't - military camouflage.
Defence, 1993, XXIV(2), 10-14.
Goetz, P. W. (Editor-in-Chief). The New Encyclopedia
Britannica. Encyclopedia Britannica Inc., 1988. p 77 1.
Hudson, R.D. Infrared system engineering. John Wiley &
Sons, New York, 1969.
Soviet Electronic National Defence. 1985, 35-42.
Soviet military thought. Militay Review. 1982, 6, 25.
Introduction
10.
11.
International Defence Review. 1985, 8, 1235-57.
Schmieder, D.E. & Walker, G.W. Camouflage, suppression
and screening systems. In Countermeasure Systems, Vol7,
Edited by David H. Pollock. The Infrared & Electrooptical
Systems Handbook, ERIM, Michigan & SPIE Optical
Engineering Press, Washington, 1993.
5
CHAPTER 2
MODERN MILITARY TECHNOLOGY AND
ITS FUTURE TRENDS
2.1
INTRODUCTION
Modern military technology and its future trends have been
discussed at length by Friedman et a1 in their book on Advanced
Technology Warfare1.The information given in this chaptkr is based
on the above reference.
It is not difficult to comprehend for a layman to what levels
science and technology have progressed and the impact they have
made in the various theatres of war - the land, the air and the sea.
The impact of the technological explosion of the 20th century has
made space another combat zone through the employment of
satellites. Developments in the field of electronics, the computer
revolution, and improvements in the performance of existing
materials and development of new materials satisfying critical
requirements, have significantly added to the armamentarium of
military hardware making the weapon platforms, weapon systems
and controls more and more sophisticated and complex. This can
be very well gauged, for example, from the ballistic and cruise
missiles currently available.
If the military hardware continues to grow in sophistication at
the present rate, it would be difficult to predict the nature and
magnitude of future wars. A s weapon platforms and weapon systems
grow in their capabilities to zero-on to the target, the availability of
effective countermeasures will become a key factor for combat
survivability.
2.2
LAND WARFARE
Today's war on the ground has become highly complex with
the introduction of improved technologies into combat systems
which has greatly enhanced the range and lethality of the weapon
8
Introduction to Camouflage and Deception
systems employed by ground forces. To counteract the multitude
of highly potent sensors and weapon systems with which the
airspace above the ground is filled, there are equally potent air
defence systems on the ground providing protection to the battlefield
on the ground.
2.2.1
Main Battle Tank
The main battle tank (MBT)has a major role in land warfare.
Its design has been continuously absorbing the developments in
related technologies with special reference to fire power, protection
and mobility. As a result, the speed (reaching a maximum of around
70 kmph on level ground), the calibre of the main guns, the firing
range, the accuracy of fire, the thickness of the armour, have all
increased. Different countries have their own designs with variations
in relative importance to fire power, mobility and protection. Besides
the large calibre gun, tanks have night vision equipment, thermal
imagers, electronic fire control computers and navigational aids
which enhance the tank's performance a s a weapon system.
The most vulnerable part of the tank is its armour (particularly
against top attack) which is receiving maximum attention for
protection against anti-tank weapons - missiles, rockets and guns.
The American M- 1, German Leopard-2, and the Soviet T-80 utilise
composite armours for effective protection. The British CHOBAM
a m o u r has layers of metals, ceramics and plastics, which can defeat
the High Explosives Squash Head (HESH)round. This armour has
been countered by the long rod penetrator projectile which can pierce
through the armour. Then came the reactive armour. This utilises
an explosive on its outer surface, to prevent the projectile from
entering the armour. The fourth generation Russian tanks, such
a s T-64, T-72 and T-80 have incorporated some special features.
Their gun can fire Armour Piercing, Fin- Stabilized Discarding Sabot
(APFSDS)projectile, which can defeat the High Explosive Anti-Tank
(HEAT)ammunition as well as High Explosive Squash Head (HESH).
India is also manufacturing the Fin- Stabilised Armour Piercing
Discarding Sabot (FSAPDS)projectile. In India, DRDO has developed
Kanchan a m o u r which is being incorporated in MBT Arjun.
Significant advances can be expected to take place in the tanks
of the future, mainly in terms of fire power, manoeuvrability and
armour strength, to provide greater strength to land warfare and to
withstand the anti-tank weapons - mines, missiles, rockets and
guns, particularly the anti-tank guided missiles (ATGMs) whose
technology has been greatly advancing in terms of their guidance
systems, fire power and ability to distinguish between real and false
targets.
Modern Military Technology and its Future Trends
Besides MBT, robotic tanks such a s robotic obstacle breaching
tank (ROBAT)-which can breach minefields in hostile environment,
autonomous land vehicles, and programmable robot observer with
logical enemy response (PROWLER)will be new additions from US.
This class of vehicles will be equipped with microcomputers with
artificial intelligence software and a variety of sensors that will
enable them to patrol the battlefield. Various other vehicles such
as Armoured Personnel Carriers (APCs)- battle taxis, BMPs (Boyeva
Mashina Pekhoti) of Russia, and BFVs (Bradley Fighting Vehicle)
of US are being deployed for a number of roles.
2.2.2
The Infantry
Modern technology has brought in many changes in the
battlefield environment of the infantryman. These changes have
resulted in increased mobility, improved anti-tank capability, better
personal equipment, more portable weapons, etc.
The infantryman of the future will probably wear a helmet
made of kevlar, then a number of sensors such a s image intensifier,
thermal imager, and gyro-stabilised laser target designator, as well
as a pocket-sized computer with several tens of megabytes of
memory.
The Artillery
Major technological advances have enhanced the performance
of artillery. Revolutionary advances in the field of electronics have
brought in improved communications, observation means, survey
capabilities and artillery fire. The artillery has a variety of munitions,
including nuclear weapons, a t its disposal.
New @idance systems, such a s those used in US Copperhead
and Precision Guided Munitions (PGMs), have greatly enhanced
their capabilities while hitting the targets. The Multiple Launched
Rocket System (MLRS),which was under development by US, UK,
Federal Republic of Germany and France, had a provision to
incorporate a terminal guidance warhead to defeat armour and
another warhead for chemical weapons. A development for rocket
artillery weapons will be the Cannon Launched Guided Missile
(CLGP). Another US concept is the Seek and Destroy Armour
(SADARM)which has the capability to seek and destroy individual
targets. Yet another development would be STAFF (Smart Target
Activated Fire and Forget). This will be fired in the general direction
of the target. Radio waves reflected from the target would be picked
up by an antenna in the nose of the projectile which is guided by
an onboard computer.
2.2.3
9
10
Introduction to Camouflage and Deception
2.2.4
Role of Air Defence
The role of air defence is to protect ground installations and
forces from aerial attacks. This is accomplished by radar directed
Surfac-to-Air Missiles (SAMs).The US designed PATRIOT counters
high speed aircraft and missiles a t all altitudes a s well as jammers
and other electronic countermeasures (ECMs).
2.2.5
Nuclear, Biological and Chemical Warfare
The prospect of nuclear war (although not fortunately resorted
to till now) significantly changes military planning. Here it is the
dispersal of troops that is to be adopted instead of the normal method
of concentrating them.
Chemical warfare (CW) has high potential. It involves the use
of nerve agents, toxins and psychological agents. These nerve agents
are derived from Tabun, Sarin and Soman. In biological warfare
(BW),toxins derived from bacteriological organisms such a s botulin
would be employed. Psychological agents a r e derived from
psychochemicals such as (lysergic acid diethylamide) LSD. These
chemical agents can be spread by several means such as aerial
bombs, artillery shells or by aerosol sprays.
2.2.6
Surveillance and Target Acquisition Systems
For rapidly reacting to any adverse situation in the battlefield,
it is essential to find out the concentration and disposition of the
opponent. Several advances have taken place in this area which
have greatly enhanced battlefield surveillance. The means through
which this is accomplished are from ground, air, a s well a s space.
The equipment used include optical instruments, electrooptical
devices, radars, and thermal imaging systems. These can be hand
held, tripod mounted, mounted on ground platforms, helicopters,
remotely piloted vehicles, drones, aircraft and satellites.
2.2.7
Command, Control and Communication (C3)
The electronic revolution has made a great impact on command,
control and communication (C3) systems in the battlefield and
elsewhere. Information can flow from FEBA (Forward Edge of the
Battle Area) and FLOT (ForwardLine of Own Troops).The operational
area will have a matrix of trunk nodes. The principal component of
a node is a vehicle containing a computer-controlled electronic
switching device which functions a s an automatic exchange. The
exchange connects one user to another.
The jobs of the widely dispersed and highly sophisticated arms
of today have become simpler and rapid, with the advances that
have taken place in C3.
Modern Military Technology and its Future Trends
2.3
AIR WARFARE
Today war in .air is backed by more advanced technologies
than war in the other two theatres - land and sea. Obviously it is
more complex and sophisticated, and greatly influences the war in
other theatres. Technologies have advanced to such a n extent that
today there may be no need for a pilot, or human crews in a combat
aircraft, from which targets such as a tank or ship or another craft
can be hit and destroyed. What used to be done by the pilot's eyes
is now performed by a wide range of sensors, viz., electrooptical,
infrared, microwave etc. Further, cruise missiles carrying warheads
and satellites have added new dimensions to war in general and to
air warfare and space warfare in particular.
2.3.1
Air Defence
It is known that for a n aircraft to survive in enemy's air space,
it has to fly a t the lowest possible levels to minimise radar detection.
This has brought attention on to low level air defence systems. The
introduction of Airborne Warning and Control System (AWACS)
which utilises a multimode radar a t a height of less than 10,000 m
(10km) has extended the range of vision to about 400 km, enabling
detection of targets flying close to the ground. Besides, AWACS can
provide a lot of information on friendly and hostile forces. But, a t
the same time, every defence system is countered by measures
incorporated in the combat aircraft. These include: Electrooptical
Countermeasures (EOCM),Infrared Countermeasures (IRCM),and
Eelectronic Countermeasures (ECM).The various types of missiles
that home on to targets can be countered by jammers, decoys and
other false sources. The Triple A (anti-aircraft)or SAMs can engage
any aircraft or missile a t a range of 3-8 km.
Aircraft Survival in the Enemy's Airspace
2.3.2
Aircraft survival in the enemy's airspace depends upon its
ability to escape detection by all possible sensors which the enemy
might use. The aircraft has to be made stealthy, involving reduction
in Radar Cross-Section (RCS), suppression of infrared emissions
and all visible signs such as contrails. Stealth technology takes
care of these aspects to reduce the chances of detection. Also, to
distract detection by infrared sensors, expendable decoys in the
form of flares and infrared pulse emitters are employed.
Protection of airfields during major wars is not a n easy task.
The accepted line of action is to proyide additional support airfield
defences employing hardened aircraft shelters and aircraft that can
take off between the craters.
11
12
Introduction to Camouflage and Deception
2.3.3
Combat Aircraft a n d Weapons
The combat aircraft carries on board a variety of sensors for
different roles - ranging from navigation to weapon delivery,
including recovery a t the base. These sensors could be active or
passive, and are described elsewhere. In order to reduce emissions
which can be detected, use of active sensors has to be reduced. The
weapons carried by the aircraft are guided missiles which receive
guidance from external radar, or lasers, or have self-guidance which
rely upon IR radiation emitted by the target. The antiship missile
flies extremely low in the sea-skimming mode to escape detection.
Most of the antiship missiles use active radar homing. Today there
is a wide range of air-to-surface missiles such a s wire-guided
antitank missiles having a range of a few hundred meters and cruise
missiles which can home on a target over 3,000 km. For air-to-air
operations, the weapons are guns and guided missiles. Air-to-Air
Missiles (AAMs)of short range depend on IR homing. Fire and forget
come under this category. The other category of AAMs is of medium
range which relies on radar homing.
2.3.4
Future Air Warfare
The present-day stealth technology which is using passive
measures may be countered by further developments in sensor
technologies. So, for enhancing the chances of survival in the
airspace, active measures of stealth will probably be necessary. They
involve manipulation of the electromagnetic and nonelectromagnetic
signatures associated with the aircraft to create confusion. Another
problem which has still not been probably solved is the suppression
of IR signature of the aircraft which is being utilised by missiles for
homing on.
NAVAL WARFARE
Naval warfare has incorporated the latest technologies in its
surface warships, surface weapons, submarines, submarine
weapons, sensors, and command, control and communications.
During the last five decades, there have been rapid strides in
surface warship technologies. The surface warship h a s to
simultaneously perform several tasks, viz., Air Defence (AD),AntiSubmarine War (ASW),besides antisurface roles. In order to perform
these roles, it has to equip itself with active and passive sensors
s u c h a s Air Defence Radars, Surface Surveillance Radars,
Electrooptical Systems, Hull-Mounted Sonars, and Variable Depth
Sonars. In terms of warship armament, a surface warship has to
equip itself with weaponry to attack and defeat other surface
warships, submarines and aircraft. The most important weapon
2.4
Modem Military Technology and its Future Trends
for both offensive and defensive actions is the missile. The French
Exocet is a n antiship missile (ASM)which can be ship-launched as
well as air-launched. The Soviet antiship missile 'Shaddock' has a
nuclear warhead. The US Navy's Harpoon has penetration blast
warhead. In general, antiship missile guidance is programmed in
such a manner that the missile hits at the central portion of the
hull so that the vital services of the ship are damaged.
There are however countermeasures to antiship missile, such
as chaff decoys which provide a screen around the ship, and infrared
flares which provide alternate targets to the incoming surface and
air-launched missiles. Besides missiles, other armaments include
modern naval guns, such a s the US Navy's Phalanx CIWS (Closein Weapons System). The characteristic feature of this system is
that it has extremely fast reaction time and heavy volume of fire.
With regard to aircraft carrier scene, the wkstern navies have
dominated for many years. The vertical/short takeoff and landing
V/STOL aircraft are comparatively inexpensive. The primary role
of sea-based aircraft are Antisubmarine Warfare (ASW), strike/
attack, Air Defence (AD), electronic warfare and Airborne Early
Warnilng (AEW).
2.4.1
Submarines
The submarine is an effective underwater weapon platform.
Submarines have both acoustic and non-acoustic signatures. In
order to reduce the chances of detection, their signatures have to
be suppressed. Research efforts are being directed towards
comparatively less noisy submarines with better speeds and deeper
diving capabilities. Nuclear propulsion is one of the greatest
achievements in the submarine technology of the post World War
I1 period. Now the submarine does not have to come to surface for
refilling its air requirement and recharging its batteries, and its
speed far exceeds that of attacking surface vessels.
The torpedo has been the underwater weapon for attack and
patrol submarines since long. In comparativeIy recent years, new
weapons are being added. Submarine-Launched Cruise Missile
(SLCM) is one such weapon which can have a range u p to 1,000
km. One important role being played by the submarine is mine
laying. The important sensors of a submerged submarine are sonar
and hydrophone.
2.4.2
Antisubmarine Warfare
Submarine detection technology is critical to antisubmarine
warfare. The characteristics of a moving submarine provide the
necessary means of detecting it. Navies of the world a r e
13
f:4
Introduction to Camouflage and Deception
concentrating their R&D efforts towards improving the existing
methods, and discovering new methods of detection, localisation
and categorisation of submarines.
Antisubmarine warfare mainly involves five steps: search,
contact, approach, attack, and close combat and disengagement.
During the search stage, a surface warship or a submarine or
airborne aircraft searches for the submarine in a certain region. In
this stage, passive sensors together with inputs from other platforms
are employed. Contact stage involves detection and classification.
Detection implies the presence of a n object in a given area.
Classification tells whether the object detected is a submarine. From
the nature of the signature received from the submarine, further
information on the type and class of submarine is obtained. The
approach stage utilises passive means for localisation of the target.
In the attack stage the weapon, usually a torpedo, is launched. In
the final stage the submarine comes back to its original position of
quiet. Mines also play a major role in antisubmarine warfare.
Besides sonar (the active sensor) and hydrophone (the passive
sensor) other non-acoustic means, such a s the wake, which sets in
temperature disturbances, can be used for detection of submarines.
Submarines are also detectable by the electrical and magnetic fields
they create.
2.5
FUTURETRENDS
Probably the most important contributory factor to the
advanced technology warfare of today is the electronic revolution developments i n solid-state electronics, miniaturisation of
electronics, very high speed integrated circuits (VHSIC) and digital
computers. All these developments are finding application in military
hardware and military systems and will continue to do so to enhance
the combat effectiveness in the various theatres of war. A wide range
of the electromagnetic spectrum will find increasing applications in
modern warfare. Millitimeter wave systems may soon find t h e ~way
r
into weapon systems. Radiometers as passive seekers can also be
used in dual mode along with active systems such a s lasers.
Millimeter wave seekers will find application in antitank missiles.
Developments may take place in sonar, which is the means for
locating and tracking submarines. Passive sensors provide only the
bearing of the target. Active sonar signals alert the victim. Towedarray sonars which have been developed in comparatively recent years
can meet the requirement of long range detection of targets.
A s regards electrooptical systems, non-imaging infrared homing
systems are used in antiaircraft missiles and antiship missiles.
Modem Military Technology and its Future Trends
Imaging infrared systems are used in air-to-ground weapon systems
and night vision systems.
Lasers have found several applications in war, such a s missile
guidance, ranging and target designation, and laser-guided bombs.
The Rockwell AGM-114A Hellfire was one such missile guidance
application. Laser h a s entered the field of radar. The British
Aerospace Dynamics Laserfire is a n example. This type of radar
has the advantage of high angular resolution a s well a s good range
resolution. The Hyper-Velocity Missile which was being developed
by Vought for USAF is a multifunctional system. It can not only
detect but classify multiple moving tagets and transmit the
commands to a formation of several missiles.
In the area of communications, a combination of advancements
in the field of electronics, such a s integrated circuit electronics and
microprocessers and computer technology has brought in flexibility
and reliability in military command and control.
Electronic warfare {EW) consists of countermeasures to enemy's
surveillance, target acquisition, tracking and guidance systems.
Radar and infrared warning receivers detect signals from hostile
radars and tactical missiles respectively. The chaff and flare decoys
are the countermeasures against radar and infrared homing
systems.
The shape, scope and speed of future wars may be estimated
mainly from the technological,advancements taking place in the
field of electronics, materials and computers. With this background
of the present-day military technology, it would not be difficult to
assess the role and importance of camouflage and deception in war.
All vital equipment need the cover of camouflage and/or deception
for sustenance, combat survivability and for successfully completing
missions.
REFERENCE
1.
Friedman, R.S.; Miller, D.; Gunston, B.; Richardson, D.;
Hobbs, D. & Warmer, M. Advanced technology warfare.
Salmander Books Ltd., London, 1985.
15
CHAPTER 3
CAMOUFLAGE IN NATURE
INTRODUCTION
The origin of the biological world may be traced back to a few
thousand million years. It consists of a multitude of organic species.
The central problem of biological evolution is self-preservation. The
basic requirements of self-preservation are food, habitat, security,
procreation, rearing the offspring, and transferring the genetic
characteristics to the next generation. The various organisms have
to constantly interact with the environment in which they live,
with other species, and with their own species. The interactions
are not simple. The environment taken a s a whole is a complex
web consisting of the organism's surroundings, habitat, predators,
enemies and competitors. Adaptability to this complex web is the
primary requisite for survival. The probability of sunrival is
determined by the degree of adaptability.
The foremost requirement for an animal to survive is food. A
simple food chain consists of plant-plant feeder-predator1. While
some animals depend on plants for their food, a majority of animals
are predatory. Although in this food chain, only one predator is
given, four or even five predators may be added to the chain. It
may be said that the predator at the end of the chain is free from
other predators. Practically no animal is safe, and for every animal
there is a predator. For survival, both the predators and the prey
have to adopt strategies. The prey is constantly on the alert to
avoid recognition by the predator. The predator is constantly on
the lookout to locate and capture its prey for food. This is a n arms
race consisting of strategies and counterstrategies, the former for
defence and the latter for offence. Evolutionary arms race takes
place between different species as well a s species of the same kind.
It is a conflict between the predator and prey, between hunter and
hunted, and the aggressor and the victim of aggression.
3.1
18
Introduction to Camouflageand Deception
In the process of biological evolution, both the predator and
the prey have to constantly and equally improve their strategies
and then pass them from generation togeneration. The strategies
adopted by the animals in nature are highly varied and there do not
seem to exist counterparts for all of them even in the present-day
arms race. In the arms race in nature, there exists a bewildering
diversity of strategies and counterstrategies. All these techniques
may be termed a s camouflage.
A s applied to nature, camouflage may be defined as the means
by which animals escape the notice of predators or a s a device or
expedient designed to conceal or deceive. Whatever be the strategy
adopted, deception i s inherent in all of them since the true
appearance of the animal is replaced by a false one.
CONCEALMENT
Concealment is a widely adopted method of camouflage. In
nature, there are a variety of backgrounds characterised by
homogeneity and heterogeneity in colour, and structural simplicity
and complexity. The predominant colours of various backgrounds
are green and brown, besides sea blue and grey. These colours occur
either singly or in combination, along with tonal and hue variations.
Forests, woodlands, mountainous and rocky regions are complex
backgrounds while deserts, seas and snow regions are simple.
Cott gives a n excellent account of camouflage in nature in his
book2, 'Adaptive Coloration in Animals'. The various principles that
are found to operate by which different animals are concealed in
their respective backgrounds are:
Colour matching
Countershading
Disruptive colouration and
Shadow suppression
3.2
3.2.1
Colour Matching
The first and the foremost requirement for a n animal to blend
with its background is to have on its body the prevailing colour of
the environment.
Several varieties of caterpillars, butterflies, grasshoppers,
mantids, frogs, and birds are predominantly green in colour, which
reduces their probability of detection in their green background.
Lizards and several other species living on boughs, tree trunks and
barks are usually brown in colour. Animals living in deserts have
on their bodies dusty brown coats. In snow-bound areas white colour
is predominantly seen on birds and mammals. Fishes which dwell
in water have transparent bodies. Those living on sea shore and sea
bottom bearr OPE their bodies appropriate colours h m a ~ s i n with
g
their backgrounds. Multicolours are found on species which Eve
on flowers.
Thus concealment is attained in animals in nature, broadly,
by bearing colour resemblance to their respective environment.
BJariarhle Cobour Resemblance
Many anirnals, besides possessing colour resemblance, have
the ability to change their colour depending upon the requirement.
During their life history, while in the young stages, many
geometridae like the oalc beauty in the larval form display colour
charactc~risticsof twigs on which they rest2. A s the lava grows
and becomes arr adult, it changes its colour to that of the bark on
which it Jlves. Some i~lsectssuch as buttedies exhibit variation
r
have
in colour between wet and dry seasons. Some ~ t h eanimals
the ability lo rapidly iz?d almost instantaneously change their
colour in their effort to attain the colour of the background.
Chameleon and cuttlefish are two examples of this kind. There
are some other categories wh5.h exhibit polyrnorg~hismin
colouration3. In some of these cases it has been proved that by
being different from the rest of the crowd animals escape attention
of their predators or prey. This is probably because atlixnals develop
a search image by which they ignore unfamiliar or different
animals.
Some animals, besides possessing colour resemblance, have
structural resemblances to their respective backgrounds. The
yellow-wattled Lapwing2builds its nest on bare ground and lays
its eggs in a small depression in the ground (Fig. 3.1). In spite of
the heterogeneity of the background in terms of coliaur and
structure, the bird, its nest and its eggs blend remarkably weli
with surroundings. Similarly, the sandgrousa: which lays pinkish
eggs on hare ground among fallen leaves, the wood cock among
fallen and broken oak trees, the ringed plover morrg pebbles a d
the ptarmigan among Iichen-covered rocks, all are b e a u t i k i
examples of camouflage in complex backgrounds. Specid mention
may be made of the Eurasion bittern Botunurus stelaris [Fig, 3.2)
which nests =amongreeds'. When in danger, it straigl~fcnsits head
and erects its neck in a straight line. A s the reeds of the
backgro~lntdare blown with the winds, the bird too, ,dong with
the vertical stripes on its body and neck, sv~ays,blending well
with the background. Other examples of colour and structurd
resemblance YO their immediate background, namely, leaves,
3.2.1.1
Camouflage in nature
sticks, pebbles etc, are leaf insects, stick insects, walking sticks,
and leaf-like frogs.
3.2.1.2
Studies on Animal Colouration
Pioneering work on animal colouration was carried out by
Poulton4j5.According to him, the green colour of various caterpillars
is due to the presence of chlorophyll which is derived from the food
they eat. The green colour of tree frogs is due to selective absorption
and reflection of light6. Light falling on the animal through green
leaves is predominantly yellow in colour, which is absorbed by the
deep-seated melanophores. The guanophores reflect back radiation
lying in the green region. Where there is no green foliage, blue
radiation is more pronounced. Laboratory experiments showed that
exposure to blue light results in brown pigment, which explains the
brown colour of animals living in brown backgrounds. By and large,
the green and brown pigments of grasshoppers are either genetical
or produced in response to stimuli from the environment. Rapid
changes of colours in cuttlefish are due to the presence of special
cells in the skin which contain black melanin. Regulation of melanin
can cause different kinds of colours7.The physiological mechanisms
responsible for such rapid changes in colour are complex. Several
factors come into play such as reflex activities induced through the
sense of sight, controlled by hormones in the blood, or in some
cases due to direct action of light on skin.
It is unlikely that adaptive colouration is accidental. There is
positive evidence in support of the biological value of visual
concealment a s a means of protection from predators which hunt
by sight. The studies of Poulton and Sanders8,di Cesnolag,Younglo,
S ~ r n n e r ~ ~ .Carrick14,
'*J~,
Iselyls, Collenette16and Cheesman17are in
support of this view.
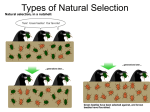
Countershading
The principle of countershading is also found to be operative
in the camouflage scheme of animals2. An animal possessing colour
matching with its background can still be recognised by the unequal
illumination of different parts of the body. Figure 3.3 shows a white
cock against white background; yet, it is conspicuously seen and
recognized. The back of the bird receives more light from the top, its
breast receives less light, and its vertical parts have the same
illumination a s that of the background. This gives rise to unequal
illumination on different parts of the body. The light and shade effects
so produced completely offset the colour matching of the bird with
the background and renders the animal recognisable. Thus, despite
3.2.2
21
22
Introduction to Camouflage and Deception
Figure 3.3. A white cock against a white background.
colour matching with background, any solid object can be recognised
by the effect of light and shade alone. Even if the cock were coloured
by a darker shade and seen against the darker background, it can
still be recognised. But the bird can be rendered invisible by making
its back darker and belly lighter. This destroys the light and shade
effects. The solid body of the bird appears to get flattened. Then the
colour matching becomes effective, rendering the bird invisible. This
is known a s the principle of countershading. This effect is observed
in various fishes and many desert animals-mammals, birds, snakes,
lizards, etc. Another example is the hare which bears a darker tone
on its back and lighter tone on its belly.
The theory of concealment by countershading was put forth
by Thayer18-21.Figure 3 . 4 illustrates Thayer's principle of
countershading. Figure 3.4(a) shows the appearance of light and
shade produced in a uniformly coloured body matching with the
background and illuminated from above, and figure 3.4(b) the
appearance of a counter-shaded body illuminated uniformly from
all directions. Figure 3.4(c) gives the appearance of flatness caused
by corrntershading and light falling from the top.
Camouflage in nature
Figure 3.4. Thayer's principle of countershading.
(a) Self-coloured when illuminated from above
(b) Countershaded when uniformly illuminated
(c) Top-lighting and countershaded
Figure 3.5. Bush Buck
- An illustration of obliterative shading.
23
24
Introduction to Camouflageand Deception
Another example of this principle can be seen in Bush Buck
(Fig. 3.5). In this case the animal has white spots on its flanks.
These spots resemble flecks of sunlight falling on its body through
vegetation. The animal a t first glance melts into the background2.
Effects of countershading can also be produced by employing
patterns of alternating black and white stripes or spots or patches.
When these patterns are observed from different distances,
depending upon the density of the patterns, a point will be reached
where, because of failure of resolution, they blend and provide the
necessary countershading effects. MottramZ2was the first to discuss
the effects of such patterns. A glaring example of this kind from
nature is the zebra (Equus burchelligranti,Fig. 3.6).The zebra has
black and white bands on its body. The black stripes are dense
where it receives more illumination, and less dense where it receives
less illumination. This type of pattern produces the necessary
countershading effects. Also, the stripes which are perpendicular
to the contour, obliterate (discussed subsequently) the form of the
animal. The zebra escapes attention from its predators during dawn
and dusk when it is vulnerable to attack. There are many other
animals which have patterns producing countershading effects a t
blending distances at which they are vulnerable to attack.
Figure 3.6. Zebra - Black and white stripes producing
countershading.
Camouflage in nature
Although countershading in nature gives a degree of invisibility
to the animal, further studies are needed to establish its role and
value.
3.2.3
Disruptive Colouration
Colour matching combined with countershading provides
adequate concealment against a simple background of uniform
colour when the animal is not in motion. But this is a n ideal
situation. Most of the animals move from place to place and hence
are seen by their predators against constantly changing
backgrounds. Under these conditions nature provides effective
camouflage to the various animals by the application of disruptive
colouration2.
The two important characteristics by which any object is
recognised are'specific surface area and specific contour by which it
is bounded. These two characteristics fix the size and shape of the
object by which it is recognised. So, if these two characteristics are
Figuse 3.7. Disruptive patterns on some snakes.
25
26
Intmduction to Camouflage and Deception
destroyed, recognition is not possible. This is what is accomplished
in disruptive colouration. A large variety of animals in nature are
camouflaged by disruptive colouration, where animals wear on their
bodies patches of irregular shape oriented at random in two or three
colours and of different sizes. Figure 3.7 shows some of the disruptive
patterns found on some snakes. These patterns divert the attention
of the observer away from the real appearance of the animal, and
atterltion is drawn towards these patches which bear no relationship
to its actual shape and size. The efficacy of the patterns depends
upon a number of factors. Firstly, some of the patches should have
the same colour as that of the background, while that of the others
should strongly differ from that of the background. Secondly, the
patches should cut the contour of the body perpendicularly rather
than running parallel to the contour. Thirdly, there should be
maximum colour contrast between adjacent patches. A single object
wearing these patterns is replaced by a large number of dissimilar
and small objects. In this way the real appearance of the animal is
(a)
(b)
(c)
(dl
Figure 3.8. Disruptive patterns illustrating the principle of
differential blending.
Camouflage in nature
masked. The pattern by itself may be dazzliig but it contradicts the
form of the animal.
Another feature observed in these patterns is that the patches
bear striking resemblances to the various objects of the background
in which the animal moves. Figure 3.8 shows how the recognition
is rendered more and more difficult. Left hand figures of each series
are the real forms of a fish, a butterfly and a bird, seen against a
uniform white background. Figures number (b)of each series show
these three animals with disruptive patterns, but not matching with
their background. Despite mismatch with the background colour,
there will be some difficulty experienced in recognising their true
form. In figures (c) and fd) of each series, the background matches
with one element of the pattern. One of the elements blending with
the background, if not totally preventing recognition, at least ddays
the recognition of the true form of the animal. This illustrates
differential blending. Figure 3.9 illustrates the principle of maximum
disruptive contrast between the background and one of the elements
Figure 3.9. Principle of maximum disruptive contrast.
27
28
Introduction to Camouflage and Deception
of the background. First figures of each horizontal row are shaded
in such a way as to correspond with their respective backgrounds,
Figure 3.10. Rana adspersa.
black in the first, white in the second, and intermediate in the third.
The second figure of each horizontal row has a pattern. The white
elements in the middle first row sharply differ in contrast from the
black background. The black element in the middle second row
sharply differ in contrast from the white background. The white
element in the middle third row differs in contrast from the grey
background. When one looks at these figures from a distance, the
elements of the figure having maximum contrast from the background
distract attention from the true form of the figure. In the third of
each row, the backgrounds are nonuniform, having broken
surroundings. In such a situation, the efficacy of the patterns is
further enhanced. This principle has wide application is nature.
Even the simplest disruptive pattern such as the one found on
the body of the East African Rana adspersa (Fig . 3.10) is effective
in hindering recognition. The body of the frog bears brown and green
colours. A yellow stripe which is conspicuous, starting lfrom the
snout and running along its back, divides the body approximately
into two parts. The yellow line resembles a blade of grass or twig;
further it bisects the frog into two apparently different entities. The
conspicuous yellow line catching the observer's eye diverts the
attention away ffom the real form of the animal. Such simple patterns
are found in nature on many kinds of birds, grasshoppers etc.
Camouflage in nature
Flipre 3.11.1Megalixalusfomasinii.
Besides patterns which produce disruption of form and size, there
are patterns which join together separate parts of the body, rendering
recognition difficult. When component parts like legs, wings, eyes,
mouths and fins are separately seen, recognition is easier. But if by
some means these parts are brought together, giving the impression
of a single entity, recognition becomes difficult. The tiny frog
29
30
Introduction to Camouflage and Deception
Megalixalusfonasinii has stripes on its back and on legs. While the
animal is in resting position it folds the limbs close to the sides of
the body. The appearance totally contradicts the real form of the
animal (Fig. 3. 1 1).
Similar techniques a r e adopted by giraffes, jaguars,
grasshoppers, moths, frogs, mantids, etc., to escape recognition by
predators or grey. Figure 3.12 shows a woodcock. Here disruption
is produced by dazzle.
The most difficult of all the organs which are difficult to conceal
are the eyes. Whatever be the background, a circular or round object
attracts maximum attention, and a s such its concealment is
necessary for hindering recognition of the animal. During the day,
in the case of tree frogs and snakes, the round eyes get constricted
into narrow slits. In the case of the common frog, there is a dark
patch of irregular shape around the eye extending into the body
which masks the eye.
3.2.4
Shadow Suppression
An animal which is otherwise well camouflaged by the methods
mentioned above can still be recognised indirectly by its shadow
cast on the ground under the action of sunlight. The probability of
recognition by the shadow depends on the nature of the surface on
which it is cast. If the surface is smooth, the shadow is well defined;
if the surface is uneven or irregular, the shadow is distorted or broken,
making recognition difficult. Shadow suppression becomes more
important in the case of animals such a s lizards, birds, butterflies,
moths, etc. whose habitats are relatively flat and even, and exposed
to sunlight.
Butterflies compress their shadow into unrecognisable form
by resting with their wings folded and orient their body with respect
to the direction of sunlight in such a way that the shadow gets
reduced practically into a line. Some butterflies tilt their bodies or
wings in such a way that their shadow is hidden. Moths keep their
body and wings depressed to the surface and crouch low. In some
categories of animals, the dark elements in their disruptive patterns
and the shadow together make recognition difficult.
3.2.5
Role of Concealing Colouration
There is no general agreement among biologists a s regards the
role of cryptic dress worn by various animals on their bodies in nature.
The question that arises is whether the cryptic colours are merely
accidental or whether they have been evolved for survival or
concealment. This aspect has been discussed a t length by Cott2.
Camouflage in nature
In general, there is a striking resemblance between the
colouration put on by frogs, toads, grasshoppers, butterflies, etc.
and their surroundings. Such a phenomenon is also observed in
several birds such as bustards, larks, night jars etc. In all these
cases, the cryptic dress is providing protection from the predators,
enemies etc. On the other hand, there are some birds such as eagles,
falcons, kites, harriers, etc. which do not possess any concealing
colouration and are conspicuous, the reason being that they have
no natural predators. Birds such a s macaws, cockattos, and
ostriches have strong and sharp beaks, a s a means of protection.
There are others which live in a colony in large numbers. There are
some other categories of birds which depend upon their speed of
motion, evade attack by diving or bolting and are aerial in habits.
In other words, cryptic colouration becomes necessary in the case
of animals of terrestrial origin of small, moderate size and unarmed.
Camouflage is effective only when the animal is stationary.
However perfect the cryptic dress may be, while in motion its efficacy
abruptly drops down. In the case of birds which are nocturnal in
habits and rest during the day, camouflage becomes a vital biological
necessity. The bird kiwi spends its daytime in holes and burrows,
and so it does not need any camouflage, and it does not put on any
cryptic dress. Likewise, starlings, kingfishers, woodpeckers which
rest in holes, in trees and underground, have no cryptic dress. In
the case of birds like larks and bustards which lay their nests on
bare grounds, cryptic colouration is well developed. During periods
of incubation there appears to be a correlation between appearance
and nesting habits. In the case of eggs which are not otherwise
protected, s u c h as those of larks, pipits, sandpipers, and
sandgrouses, they are all cryptically coloured in such a way as to
blend with their surroundings. On the other hand, the eggs of
woodpeckers, hornbills, barbets and parrots are white and hence
do not possess any cryptic colouration; but they do not need
protection by camouflage as the nests are inside holes in trees and
underground. But there are a few exceptions where the eggs which
are otherwise not protected do not have any cryptic colouration. In
general, there seems to be a close correlation between the cryptic
dress of eggs and the environment in which they are incubated. It
appears that, in general, cryptic colouration and cryptic instincts
have evolved in response to the need for concealment.
3.2.6
Concealment in Offence
Camouflage is employed not only in defence but also in offence.
Animals can sense events happening a t a distance through sight,
31
32
Introduction to Camouflage and Deception
sound and smell. While capturing prey, animals alter their
appearance, suppress noise and obliterate smell. For aggressive as
well as protective function, the predatory animals employ the same
principles of camouflage. The tiger and the panther are practically
invisible to their prey almost till the latter are attacked and caught.
Whatever be the degree of camouflage, once the animal is in
motion, it attracts attention. Basically, the problem of concealment
in offence differs from that in defence. The prey anim,al, while in
defence, remains motionless and escapes observation by its cryptic
dress. On the other hand, the predator cannot remain still, it has to
be active and in motion, and still not attract the attention of its
prey. Besides adopting cryptic colouration, the movements of the
predator have to be stealthy and skilful while approaching and
attacking the prey. Fishes are good examples of stealthy approach.
Firstly, their bodies are excessively thin, and secondly their
movements are precise and cautious. All these render the fish most
inconspicuous to its prey. Until the final assault, the leaf fish is
least observable by its prey. During the assault, the approach is so
slow and stealthy that its movements do not produce any detectable
noise. Other examples of stealthy approach are those of the spider
and snake while catching their prey.
Owls, while in flight and approaching their prey, depend upon
a combination of darkness and silence. The flight of an owl, in spite
of high speed, is not accompanied by detectable noise. This is due
to structural modifications of its feathersz3.For masking scent,
animals make use of the wind direction. They approach the prey
against the wind.
Studies on Concealing Colouration
Cott2gives an excellent review of the views of different workers
on the function of concealing colouration. Deanz4is of the view that
cryptic colouration in animals is accidental, in support of which he
cites some instances. According to Cott, those instances cannot be
used a s a n argument against the theories of cryptic colouration.
The combined use of colour matching, obliterative shading and
disruptive colouration, all in a single animal, cannot be chance effects
without any biological significance. We find a general agreement
between the cryptic dress in a wide variety of animals and the diverse
surroundings in which the respective animals live. All the observed
facts taken together indicate that concealing colouration has been
a n important end rather than an incidental by-product.
3.2.7
Camouflage in nature
Some critics put forth the argument that cryptic colouration
is the result of a physical process a s opposed to the need for
concealment in nature. But the function of concealing colouration
in biological evolution is not to be mixed u p with the mechanism of
the concealing colouration. Although the physical and chemical
mechanisms vary in different cases, the underlying optical principles
of concealment are the same in all the cases. Cryptic colouration
does not imply total immunity from attack but chances of survival
are increased. Some critics argue that it is stillness which is more
important than concealing colouration. Whether the animal is a t
rest or in motion, a cryptic colour scheme has its significance. Some
argue that since many animals do not have colour vision, concealing
colouration cannot be adaptive. Many studies have been carried out
on birds, insects, fishes and mammals, and it is established that
several animals have a wide range of colour vision. Another argument
against adaptive colouration is that many protected forms are widely
preyed upon in nature. Adaptive colouration cannot afford protection
against all animals.
The greatest supporters of t h e theories of concealing
colouration, warning colouration and mimicry have been without
exception naturalists - Darwin, Wallace, Bates, Alcock, Belt, Hale
Carpenter, Graham Kerr, Hingston, Hudson, Julian Huxley, Miles
Moss, Mortesen, Poulton, and Shelford -whose experience of natural
history has convinced them of the adaptive significance of the various
phenomena of cryptic colouration2.
Literature on this subject has been descriptive. Relatively few
experiments have been carried out to test the validity of the theory
of concealing colouration. It is of utmost importance that further
data based upon experimental observations should be obtained in
relation to the theories of concealing colouration.
3.3
ADVERTISEMENT
A s anti-thesis to concealment in nature, there are several
animals which by their appearance are conspicuous. Although this
characteristic is the opposite of concealment, it serves the same vital
needs - food, safety and reproduction. By being conspicuous the
animal advertises its inedible qualities. Thereby it is avoided by the
predator. The colours red, black and yellow in combination are utilised
for drawing attention.
The Warning Colouration
In contrast to concealment which involves cryptic colouration,
stillness and concealing attitude, advertisement involves display of
3.3.1
33
34
Introduction to Camouflage and Deception
conspicuous colours, movements, sound, smell etc. Animals which
take recourse to advertisement have structures and behaviours which
can cause real harm when attacked. The poisonous stings and bites
of many insects, spiders and snakes are examples of the above
category. These animals combine warning colouration along with
occasional use of the sting or bite to keep the danger away. There is
hardly any need for a stinging animal like bee, wasp or hornet to
hide its appearance and not let the victim know what struck it. So,
instead of hiding, it leaves a permanent impression of its appearance
and sting in the mind of its victim, so that bee or wasp is never
approached subsequently.
Salamanders (Salamandra rnaculosa), tree snakes (Dipsado
morphus dendrophilus), sea snakes (Pelamydrus platurus), and
sawflies (Athalia cordata) use the combination of black and yellow
colours for drawing attention. Some collect in large numbers with
the same aim.
The porcupine, when threatened, employs several means to
give warning to its enemy. The anirna.1 opens its thorny spines, it
stamps, squeals, rattles and stinks when in danger. The puffer fish
(Tetrodontidae)grows in size and resembles a balloon when in danger.
The little porcupine fishes gather together creating a n appearance
of a large fish when in danger. There are some animals which exhibit
bright colours all of a sudden when there is a threat. Snakes employ
hissing sounds for drawing attention. Some animals release irritating
secretions. There are categories of animals which emit nauseous
odour. Butterflies employ odour for conspicuousness. There are some
other categories of animals which possess tough bodies. All these
animals, with the dangerous characteristics they possess, remain
conspicuous so that they are avoided.
There are some animals which are palatable and defenceless.
But they get protection by borrowing the characteristics of aposematic
animals which are inedible. Also some birds build their nests very
near the habitat of poisonous insects such as bees, wasps, etc.
3.4
DISGUISE
Disguise is employed both in defence and in offence.
Resemblance to Object's i n the Background
Many animals resemble objects of their background. Some
fishes resemble dead leaves, some ,other categories acquire the
appearance of thin leaves either by compressing or by depressing
their bodies or by a combination of obliterative shading and
disruptive patterns. Butterflies have wings resembling thin leaves.
3.4.1
Camouflage in nature
Some insects resemble curled leaves. Some type of moths, beetles
etc., resemble bark. Lizards, frogs, and birds also utilize this type of
deceptive appearance. Some insects such a s mantids, grasshoppers,
caterpillars and tree frogs resemble lichen. Some insects bear striking
resemblance to bird droppings. Some moths resemble broken twigs.
Marine organisms resemble shingle, sea grass etc2.
Diverting Attention to Non-vital Part
Some animals divert the attack of their predators to non-vital
parts of their bodies. A round object attracts maximum attention.
The wings of mantids, moths, butterflies etc possess eye-like round
patterns at the extreme ends of their wings. Even if the predator
attacks, the prey escapes with a minor injury to the extreme end of
its wing. In some lizards, the tail end is brilliantly coloured to attract
attention. When attacked, the lizard escapes with a minor injury to
the tail end.
Some animals create the impression of a head a t a wrong part
of its body. Head is a vital organ both for the predator and prey. A
predator, while capturing the prey by ambush, conceals its head.
Some predators possess characteristics by which they allure the
prey to the most dangerous part of the body. Some animals like
mantids resemble buds of flowers. When insects visit these buds
they become food to these animals2.
3.4.2
Mimicry
We have seen that some animals have a n inbuilt mechanism by
which they can sting or bite and also have warning colouration in
order to warn their victims against future attempts at harming them.
There are some animals which by merely mimicking the warning
colouration of the above animals escape attacks from their predators
and enemies. Mimicry has been extensively studied in the case of
butterflies3. The most common type of mimicry is called Batesiari
mimicry in which a harmless or a nonpoisonous species mimics a
harmful or a poisonous one. This form of mimicry was first
demonstrated by Bates over a hundred years ago. The North American
monarch butterfly is inedible and also warningly coloured. The viceroy
butterfly which is palatable mimics the monarch butterfly. Thus by
mimicking the monarch in warning colouration, the viceroy gets
protection from predators. There is another type of mimicry known as
Mullerian mimicry, after the name of the naturalist Fritz Muller. In
this form of mimicry two species of butterflies that are both unpalatable
mimic each other. Animals try to mimic only those parts which can
actually be seen or observed. Mimicry is employed by several species
of insects, birds and snakes. Some moths mimic wasps, some spiders
look like ants, and some flies bear resemblance to bees.
3.4.3
35
36
Introduction to Camouflage and Deception
3.5
OTHER FORMS OF CAMOUFLAGE
Besides visual camouflage which we have discussed so far,
there are other forms such as ultraviolet camouflage, auditory
camouflage and olfactory camouflage3. Many insects have vision in
the ultraviolet region. So the colours and patterns on flowers and
insects as perceived by them are quite different from our perception.
A s regards auditory camouflage, we may cite the example of
small birds which, in their effort to help their fellow birds, produce
sound signals a t the approach of a predator. These alarm calls are
produced in such a way that the predator cannot locate the source
of the signals. MarlerZ5has discussed the physical basis of auditory
camouflage. His conclusions have been found to be generally correct2'j.
Other examples of auditory camouflage are some species of mynas
and bulbuls which imitate the calls of other birdsz7.
Of the three senses -- sight, sound, and smell - it is the smell
that plays the important role in the case of most insects. In all
species of ants, most individuals in the colony are sterile and labour
for the colony, helping the queen to produce more offspring. In some
species of ants, adequate numbers of workers are not produced. As
such, these species capture workers from other species which produce
a large number of workers. The captured workers, when they become
adults, work for the colony. StudiesZ8showed that the Fomica
Sunguinea group sprays large quantities of decyl, dodecyl and
tetradecyl acetates on the colony raided. This disturbs the olfactory
sense of workers in the colony. In the process, sufficient number of
pupae are captured to meet the requirements of slaves whose number
in the other colony is less.
3.6
CAMOUFLAGE IN PLANTS
Camouflage is also found to occur in plants. But it cannot be
as effective as in the case of animals, the reason being that the
former are immobile, and the latter have the mobility which helps
them to fool their predators continuously. The tips of leaves and
tendrils of passion flowers mimic eggs of butterflies. Thereby they
prevent the Heliconius butterfly from laying eggs on them. Some types
of orchids mimic female bees and wasps. Male bees and wasps rest
on these flowers for copulation and in the process pollination takes
place3.
3.7
EVOLUTION OF CAMOUFLAGE
The phenomenon of industrial melanism is an example to
illustrate the evolution of camouflage in nature. According to the
Camouflage in nature
theory of natural selection only a small fraction of the individuals
of any species produced in each generation will survive. This is
because the relatively inferior and less adapted ones get eliminated.
Mutations giving rise to differences in adaptiveness take place a t
random, a s a result of which the original variety may totally be
replaced. Let u s consider one example. Before the mid-19th century
the moth Biston betularia in its peppered form was found in
England. This rests on bark covered with lichen and is well
camouflaged. At the same time there used to exist in small numbers
a dark form known a s carbonaria. The lichen-covered barks used
to render the dark form conspicuous and hence unprotected. With
the onset of industrialisation, the barks of trees began to turn
darker and darker with the deposition of soot. This rendered the
dark form of the moth camouflaged, while the peppered form got
uncamouflaged, t h u s becoming a victim to its predators. In
consequence, the proportion of peppered form started decreasing
and the darker form began to increase. In the course of a few
decades the darker form came to constitute 98 per cent of the
pop~lation~
It~was
.
further found that with reduction in air
pollution there was a corresponding reduction in the proportion of
the dark form30.
3.8
CONCLUSION
The present chapter h a s provided several examples of
camouflage in nature in the form of concealment, advertisement
and disguise. But not in all the cases has it proved beyond doubt its
protective value against predators, enemies etc. In order to obtain
clear proof in every case extensive field and laboratory studies are
necessary. However, a few general conclusions about camouflage in
nature may be drawn, based upon the existing evidence in support
of the protective value ascribed to it3. These are:
(a) Camouflage is of widespread occurrence in nature;
(b) Camouflage combined with appropriate behaviour
characteristics provides adequate protection;
(c) A single strategy alone is not always successful; and
Whatever be the means adopted for sustenance and security
by animals in nature, deception is inherent in all of them.
REFERENCES
1.
Owen, D. Camouflage and mimicry. Oxford University Press,
1980.
37
38
Ihtroduction to Camouflage and Deception
Cott, H. B. Adaptive coloration in animals. Methuen & Co.
Ltd., London, 1966.
Gadagkar, R. Lessons in the art of deception. Proceedings of
the Seminar on Camouflage. 19-2 1 October, 1989, Defence
Laboratory, Jodhpur, India.
Poulton, E.B. The colors of animals. Int. Sci. Ser. 1890. LXVIII
(XIII), +360.
Poulton, E.B. The experimental proof that the colours of certain
lepidopterous larvae are largely due to,modifiedplant pigments
derived from food. Proc. Royal Soc. London, 1893. LIV, 4 17.
Noble, G.K. Biology of the amphibia, New York, 1931.
Bozler, E. Ueber die Tatigkiet der ernzelnen glatten muskelfaser
bei
der
Kontraktion,
ii
Mitteilung:
Die
Chromatophorenmuskeln der Cephalopoden. Zeits. F. Vergl,
Physiol. 1928. 7,379-406.
Poulton, E.B. & Sanders, C.B. An experimental enquiry into
the struggle for existence in certain common insects. Rept.
Brit. Assoc. Adv. Sci. 1898. p 906-09.
Cesnola, A.P.D. Preliminary note on protective value of colour
in Mantis religiosa. Biometrika. 1904, 3, 58.
Young, R.T. Some experiments on protective colouration. J.
Exp. 2001. 1916, 20, 457.
Sumner, F.B. Does protective colouration protect ? Results of
some experiments with fishes and birds. Proc. Nat. Acad. Sci,
Washington, 1934, 20, 559.
Sumner, F.B. Evidence for the protective value of changeable
colouration in fishes. Amer. Nut. 1935, LXIX, 245.
Sumner, F.B. Studies of protective color change In Experiments
with fishes both as predator and prey. Proc. Nut. Acad. Sci.,
Washington, 1935,21, 345.
Camck, R. Experiments to test the efficiency of protective
adaptations in insects. Trans. Royal Ent. Soc., London, 1936.
85, 131.
Isely, F.B. Survival value of acridian protective colouration,
Ecology, 1938, 19, 370.
Collenette, C.L. Notes concerning attacks by British birds on
butterflies. Proc. Zool. Soc., London. 1935, 20 1.
Camouflage in nature
Cheesman, R.E. In unknown Arabia. London, 1926, XX,+447.
Thayer, A.H. The law which underlies protective colouration.
The Auk, 1896, 2 , 124.
Thayer, A.H. Further remarks on the law which underlies
protective colouration. Ibid, 1896, 2 , 3 18.
Thayer, A.H. Protective colouration in its relation to mimicry,
common warning colours a n d sexual selection. Trans. Ent.
Soc. London, 1903, 553.
Thayer, A.H. An arrangenment of the theories of mimicry and
warning colours. Popular Science, New York, 1909, 75, 550.
Mottram, J . C . Some observations on pattern-blending with
reference to obliterative shading and concealment of outline.
Proc. 2001. Soc., London, 19 15, 679.
Graham, R.R. The silent flight of owls. J. Roy. Aero. Soc., 1934,
38, 837.
Dean, B. Accidental resemblances among animals: a chapter
in un-natural history. Popular Science, 1908, LXXII, 304.
Marler, P. Characteristics of some animal calls. Nature, 1955,
176, 6.
Halliday T.R. & S l a t e r , P . J . B . Animal b e h a v i o u r .
Communications (Vol 2). Blackwell Scientific Publications,
Oxford, 1983.
Ali, S. The book of Indian birds, Bombay Natural History
Society, Bombay, 1979.
Regnier F.E. & Wilson, E.O. Chemical communication and
"propaganda" in slave-maker ants. Science, 197 1, 172, 267.
Kettlewell, B. The evolution of melanism. Clarendon Press,
Oxford, 1973.
Brakefield, P.M. Industrial melanism: do we have the answers?
Trends Eco., 1987, 2 , 117.
39
VISUAL CAMOUFLAGE
4.1
INTRODUCTION
Despite all the developments in sensor technology - both
electromagnetic and non-electromagnetic, and their potentialities the eye, unaided or aided, still remains a most frequently used
sensor. A s such, visual camouflage still occupies a very important
place in modern war.
This chapter deals with visual camouflage embodying the
properties of the visible region of the electromagnetic spectrum
relevant to the topic and sensors employed, revealing features of
various military objects, and detailing principles and methods
employed in visual camouflage to reduce target detectability and
thereby to enhance survivability.
4.2
VISUAL CAMOUFLAGE
Visual camouflage deals with all possible methods, devices and
techniques which prevent or delay the recognition of the true nature
of the military object, when the human eye, naked or aided is the
sensor employed by any optical device.
Visual camouflage is concerned with the wavelength range
0.4 - 0.7 pm of the electromagnetic spectrum. The physiology of
human vision, visual acuity, and dark and light adaptations of
the eye are discussed below.
THE HUMAN EYE
Figure 4.1 gives the principal parts of human eye1v2.The
essential structural components of the eye are:
(a) A crystalline lens, consisting of a gelatinous transparent
material which focuses the rays of light from a n object into
the interior of the eye;
(b) Vitreous humour which is located on the backside of the lens;
(c) Aqueous humour located in front of the lens and covered by
the cornea;
4.3
42
Introduction to Camouflage a n d Deception
RETINA
\
VBTREOUS
HUMOUR
LENS
\/F
AQUEOUS
'HUMOUR
FOVEA
OBPsC
NERVES
BLIND
SPOT
I
ClLlARY
MUSCLES
Figure 4.1. Principal parts of human eye.
Source:
(d)
(e)
(f)
Surveillance and target acquisition systems. A.L. Rodgers, I.B.R.
Fowler, T.K. Garland-collins, J.A. Gould, D.A James a n d W. Roper
(reproduced with perm~ssionfrom Brassey's, London). 0 : 1984,
Brassey's (UK)Ltd, London
Ciliary muscles which control the shape of the eye lens for
focusing objects located at different distances. Actually, it is
the curvature of the cornea which is primarily responsible for
effecting the necessary bending of light into the interior of the
eye;
The retina extends over the posterior of the sphere of the eye
and has a complex structure consisting of several layers. It
converts light falling on it into electrical signals which are
conveyed by the optic nerve to the cortex of the brain where
the sensation of vision is produced;
The rods and the cones lie in the bottom layer of the retina.
Rods are responsible for visual perception at luminance levels
as low as
Cd/m2.The sensitivity of the rods enables us to
see even in moonlight and starlight. Low level luminance
perception is known as scotopic or night vision. In scotopic
vision, colour perception is not possible, i.e., the rods provide
only neutral colour perceptions - white, grey or black. The
upper luminance level at which rods cease to function is
approximately 10 Cd/m2. The cones cause the sensation of
colour. Cones get activated at higher levels of luminance such
a s daylight vision. Colour vision is known as photopic vision.
The cones become active at about
Cd/m2. The region of
luminance levels within which both the rods and the cones
are active is,
10 Cd/m2.This vision is known a s mesopic.
Visual Camouflage
There are approximately 1 x 108 rods, and 6 x lo6 cones in
each eye. There are about lo6nerve fibres, each fibre being connected
to a large number of rods. The cones are concentrated in the central
portion of the retina while the rods are more uniformly distributed
throughout. The upper limit of luminance levels of photopic vision
is 3 x lo5 Cd/m2.
The important characteristics of the eye are visual acuity, and
its variation with contrast, dark adaptation, light adaptation, and
sensitivity of rods and cones to light of different wavelengths.
4.3.1
Visual Acuity
The term visual acuity means the ability of the eye to perceive
fine detail or grain in an object scene. It corresponds to the resolving
power of an optical instrument. Quantitatively, visual acuity can be
expressed a s the smallest angle which two close-by points in a scene
subtend such that they are seen a s two separate points. The smaller
this angle, the greater is said to be the resolving power. Alternatively,
the reciprocal of this angle also gives a measure of visual acuity.
This is expressed in reciprocal minutes of arc.
Visual acuity is a function of the wavelength of light, diameter of
the pupil of the eye (visual angle), and luminance level of the
background. For one and the same person, as the luminance level of
the scene increases, the resolving power increases. Visual acuity at
night will be very low, as compared to daybme. The graph of visual
acuity vs luminance (Fig. 4.2) gives the manner in which the visual
acuity increases with luminance. The limit of resolution of the human
eye, under normal daylight conditions, may be in the range of 60-90
seconds of arc depending upon the diameter of the pupil of the eye.
Visual acuity is also a function of the brightness contrast. The higher
the brightness contrast, the better will be the visual acuity.
4.3.2
Dark a n d Eight Adaptations
The eye cannot adapt itself all of a sudden to changes in
luminance levels. A s a person enters a dark room from outside where
the luminance level corresponds to sunlight, or when a person,
initially in a dark room, comes out where luminance levels are high,
he finds it difficult to see the objects until he acquires dark or light
adaptation depending on the situation. How much time the eye takes
to acquire dark adaptation depends upon the pre-adapting light
level. The higher this level, the greater will be the time taken by the
eye to acquire dark adaptation. Dark adaptation is a function of
wavelength of the pre-adapting light. The longer this wavelength,
the less will be the time required to acquire dark adaptation. Hence,
it is advisable for soldiers to wear red goggles2 for quicker dark
43
44
Introduction to Camouflage and Deception
Luminance (CdmJ)
Figure 4.2. Variation of visual acuity with luminance.
Source:
Surveillance and target asquisition systems. A.L. Rodgers, I.B.R. Fowler,
T.K Garland-Collics, J.A.Gould, D.A.James and W Roper (reproduced with
permission from Brassey's, London).@ ; 1984, Brassey's (UK)Ltd, London.
adaptation. Light adaptation is much faster than dark adaptation,
and a s such it does not pose much of a problem.Under normal
daylight conditions, the eye exhibits maximum sensitivity a t 0.55
pm wavelength. But to a dark adapted eye, the wavelength of
maximum sensitivity shifts to 0.5 pm (Purkinjeeffect). In other words,
the luminance level required for vision at short wavelengths such a s
blue light, under dim light conditions, is less compared to the
luminance levels required a t longer wavelengths such as red light.
A s such, red objects start losing their colour a s background
illumination becomes less and less. So, a s the objects start losing
their colour, recognition becomes more and more difficult.
The eye possesses a field of view of approximately 120". It can
respond to a wide range of luminance levels (10-6- 10-3Cd/m2).It
Visual Camouflage
has a contrast threshold between 2 and 3 per cent3. The eye has
ability to detect a black line as thin a s 1 second of arc, located in a
bright background. The science of human vision is quite complex
and it has been the subject of several investigation^^-^ for purposes
of evaluating visual camouflage.
CHARACTERISTICS OF LIGHT RELEVANT TO
4.4
VISUAL CAMOUFLAGE
Colour, texture and brightness are the important object
characteristics of light which enable u s to distinguish one object
from another or any object from its background.
4.4.1
Colour
Som' has given a detailed account of colour, polour vision and
colour measurement. Colour perception is caused by a physiopsychological response of the eye-brain system.
According to the Young-Helmholtz theory of colour vision, there
are three basic receptors in the cones having maximum sensitivity
in the red, green a n d blue regions of the visible spectrum,
respectively. All colour sensations are produced by the variations
in the magnitudes of the response of these three receptors to external
stimuli. This theory h a s been supported by experimental
observations that a given colour can be produced by mixing red,
green and blue radiation in certain proportions. Although colour
sensation involves a physio-psychological process, we can correlate
the sensation of colour to the spectral composition of the light causing
the sensation. When the spectral energy distribution gets altered,
the corresponding light appears to produce a different colour
sensation. Let u s examine the colours produced by the spectral
components of the white light spectrum. Spectral components having
wavelengths from 630 to 700 nm are red in colour, from 590 to 630
nm are orange, from 570 to 590 nm are yellow, from 550 to 570 nm
are yellow-green, from 5 10 to 550 nm are green, from 450 to 480 nm
are blue, and from 400 to 450 nm are violet.
Hue is the gradual change of colour from one to the next. Hue
is determined by the position in the spectrum of those radiations
that are stronger than the remainder. The depth or the saturation
is determined by the degree to which these radiations predominate
over the remainder.
The quality and intensity of visual sensations are influenced
by the quantity of light. In the case of a self-luminous cbject, the
greater the amount of the emitted radiation, the brighter it would
appear. In the case of diffusely reflecting objects, as is the case with
most of the objects, the lightness or darkness of the object depends
upon its reflectivity.
46
Introduction to Camouflage and Deception
4.4.1.1
Geometrical representation of surface colours in
tenns of lightness, hue and saturation
A three-dimensional structure -a colour solid may be developed,
within which any surface colour may be located in terms of its
appearance, i.e., its lightness, hue and saturation1 (Fig. 4.3). The
central vertical axis represents the neutral colours or the grey levels
with black and white at the lower and upper ends. The distance
between these two extreme points determines the scale of the solid.
Colours of any one hue could be located in a vertical plane starting
from this axis. The lightness of a colour sample could be indicated
by a certain height above the black level. The saturation of the colour
could be indicated by a length in the above plane in a direction
perpendicular to the central axis. Besides lightness, h u e and
saturation, coIour coordinates are utilized for specification of colour
a n d its measurement. The mathematical aspects of colour
coordinates are given in Appendix-A'.
RED
Figure 4.3. Three-dimensional colour solid.
Source:
Proceedings of the Seminar on Camouflage held a t Defence Laboratory,
Jodhpur, India; October 19-2 1, 1989. 'Light and its Measurement' by S.C.
Som, Calcutta University, Calcutta, India.
4.4.1.2 Measurement of colour
The instruments used for the measurement of colour are: (i)
visual trichromatic colorimeters which employ visual colour
matching, (ii)photoelectric colorimeters which employ three photocell
Visual Camouflage
systems with spectral sensitivities corresponding to the International
Commission on Lighting (CommissionInternationale de'1 Exclairage,
CIE) X, Y and Z distribution curves, and (iii) visual or physical
spectro-photometers for determining the spectral composition of
light coming from the sample1.
Colour matching of objects with background is one of the most
important aspects of visual camouflage. In this context a n
understanding of the concept of colour, its quantification and
measurement would be useful.
4.4.2
Texture
Optical texture is another important characteristic of an object
surface or background. To make two surfaces indistinguishable, it
is not only colour matching that is important but texture matching
is also necessary. Two surfaces having the same colour, if they have
different textures, give rise to different appearances, and, thereby,
they can be distinguished. Approximately, the ups and downs of a
surface may be qualitatively referred to a s the optical texture. Let
us take an example to understand what is qualitatively meant by
optical texture. When aerial colour photographs of a rice field and a
wheat field are observed, we find that although both have the same
colour, we can distinguish and identi@ them a s rice and wheat
fields by their textural difference. The light and shade effects of a
rice field are different from those of the wheat field. The physical
characteristics, such as the leaf size, shape, length, and inclination
of the leaves to the direction of sunlight are different for rice and
wheat plants. Because of these differences, the light and shade effects
are different when sunlight falls upon the two species. These effects
alter the overall appearance, although basically the colour is the
same. Studies on quantification and measurement of texture have
been extensively carried outg.
Brightness (Contrast)
Difference between the brightness of a n object a n d its
background gives rise to brightness contrast.
The unit of Luminous intensity is Candela (Cd). Luminous
flux is that part of radiant flux which is capable of producing
visual sensation and is expressed in terms of the unit lumen.
One lumen is the light energy emitted per second within unit
solid angle by a uniform point source of one candela. Illuminance
is the luminous flux striking unit area of a surface. It is expressed
in lux or lumen m-2 . Luminance and brightness are the same
and are expressed a s candela m-2.
4.4.3
47
48
Introduction to Camouflage a n d Deception
If Bois the brightness of the object, and B,the brightness of the
background, then the brightness contrast is given by
4.5
SENSORS IN THE VISIBLE REGION
There are several sensors in the visible region, ofwhich the human
eye is the basic surveillance system in the battlefield. The various
systems which aid the human eye are: telescopes, binoculars,
periscopes, image intensifiers,starlight viewers, low light level television
systems, laser systems and many night observation devices. Besides,
target characteristics in the visible region can be characterised by
airborne instruments such as cameras, line scanners etc.
4.5.1
Electrooptical Instruments
For round-the-clock battlefield operations the ability to see well
in the dark is very important. At the luminance levels of moonlight
and starlight, h u m a n eye performance i s not adequate for
surveillance, reconnaissance and target acquisition at night. Several
optical systems that can enhance the performance of the eye during
the daytime have already been listed in the previous section.
During night, the low level light reflected from a scene comes
from a variety of sources. These are the moon, planets, stars and
skyglow. Objects cannot be seen clearly under these light conditions,
rendering night operations difficult. Table 4.1 gives the light levels
during day and night under different conditions.
Table 4.1. Illuminance levels during day and night
Source:
Level
Lux (I m/ma)
Clear sunlight
Good interior working illumination
Twilight (dusk)
Moonlight (fullmoon)
Clear starlight
Overcast starlight
1o5
1o3
10'
Very overcast starlight
10 j
10-I
10-3
1o^'
Surveillance and target acquisition systems. A.L. Rodgers, I.B.R. Fowler, T.K.
Garland-collins, J . A . Gould, D.A. James & W. Roper (reproduced with
permission from Brassey's, O 1984, Brassey's(UK), London).
From the Table 4.1, it is seen that in order to raise the luminance
level from overcast starlight to twilight, the gain required is los.
Optical aids such as night binoculars can enhance the vision to
some extent, but they are not adequate. In order to enhance the
Visual Camouflage
scene brightness at night, electrooptical devices s u c h as image
intensifiers are used. These devices make use of the visual part a s
well a s near infrared part of the electromagnetic spectrum. Such a
system which improves visibility a t 'low field luminance levels is
known a s the image intensifier.
4.5.1.1 Image intensifiers
Figure 4.4 shows a n image intensifier system2. The objective
lens collects radiation from the scene a n d focuses it on the
photocathode. The photocathode, on absorbing radiation, emits
electrons. The released electrons are accelerated with the help of an
electric field. The accelerated electrons, upon striking a phosphor
screen, emit visible radiation. The image is viewed through a n
eyepiece.
Enhanced visibility is obtained by gathering more light from
the scene with the objective lens than with the unaided eye, further
by the higher photosensitivity and broader spectral response of the
photocathode compared to eye, and thirdly by amplification of photoevents.
There are several photocathode materials. The S 1 cathode
which was used earlier consisted of silver, oxygen and caesium.
Then came S20 and S25 photocathodes having better response
than S1. A recently developed photocathode material is caesiated
gallium arsenide which h a s a large a n d uniform wavelength
response.
,
0 mm
.-.-
Optic
Window
Focussing
Electrode
7
/\
Electron
>-
0
Target Objective
lens
't
Photocathode
-ight Out
A
Phosphor
Figure 4.4. Image intensifier system.
Source:
Surveillance and target acquisition systems. A.L. Rodgers, I.B.R. Fowler,T.K.
Garland-collins, J.A.Gould, D.A. J a m e s & W. Roper (reproduced with
permission from Brassey's, O 1984, Brassey's (UK), London).
49
50
Introduction to Camouflageand Deception
Single stage tubes have the disadvantage that the gain is
not adequate for recognition of objects under starlight conditions.
High speed detection is not possible a s the eye needs dark
adaptation. These disadvantages are overcome by employing
multistage tubes. By using a three-stage tube, we can enhance
the brightness of a scene from overcast starlight to twilight. Fibreoptics couples the individual stages. Figure 4.5 shows a threestage image intensifier tube2. From stage to stage the voltage
increases by 15 kV.
Further amplication is achieved by making use of secondary
emission of electrons. The fast moving electrons, upon colliding with
the electrons of outer orbits of atoms, knock out electrons. These
secondary electrons get accelerated under the applied high voltage,
which, on further collisions, result in further emission of electrons.
The secondary emission is induced in the tubes of semiconductor
glass. Such tubes are inserted between the photocathode and a
phosphor screen. In a single stage, gains of the order of lo5 can be
obtained. This type of image intensifier tube is smaller in size, lighter
in weight and superior in resolution to the earlier versions, besides
producing a high brightness.
The performance of the image intensifier can be further improved
by illuminating the objects employing search lights or laser
illuminators or pyrotechnics wherever possible.
195 rnm
Fibre Optic
Face Plate
/
Figure 4.5. Three-stage image intensifier tube.
Source:
Surveillance and target acquisition systems. A.L. Rodgers, I.B.R. Fowler,T.K.
Garland-collins, J.A.Gould, D.A. James & W. Roper (reproduced with
permission from Brassey's, Q 1984, Brassey's (UK),London).
Low Light Level Television
For low light conditions, television camera tubes can also be
used2. In a television tube, photons from the scene are collected
and focused on to a target by means of a n optical system. The target
4.6.1.2
Visual Camouflage
ejects electrons. This makes the target positively charged. The
positive charges accumulated on various regions of the target are
proportional to the light intensity variations of the scene. In other
words, an electrostatic image of the scene is formed on the target.
An electron beam scans the electrostatic image on the target. The
positive charges on the target get neutralised. As more number of
positive charges are neutralised, more number of electrons are drawn
from the scanning beam. This results in a current known as videocurrent which is proportional to the brightness variations in the
scene.
Low light level television system has certain advantages such
as remote viewing and multiple read-out. Also, improving the picture
quality is comparatively easier by controlling the tube brightness
and amplifier gain. But one serious disadvantage is that it is heavier
and bulkier, and also more expensive.
The vidicon and orthicon are two such television tubes which
can operate over a wide variation in luminance levels ranging from
full daylight conditions to twilight conditions. Further developments
in these devices resulted in charge coupled devices (CCD) which do
not require electron beam scanning. In these devices, the information
is stored compactly as electric charges which can be transferred to
the output in the required manner. These cameras are rugged and
smaller in size.
For short range applications, image intensifiers under low light
levels enhance the performance of the eye. In short, these devices are
ideally suited for short range weapons and short range viewing sights.
4.5.2
Lasers
Lasers with their characteristic properties - high intensity,
coherence and monochromaticity find several applications in
surveillance and target acquisition in the battlefield. These
applications inciude ranging, designating, illuminating and
tracking2.
4.5.2.1 Rangefinding
A laser rangefinder sends a laser pulse of narrow width and
high peak power towards the target, the reflected pulse from the
target is received, and from the time taken by the pulse from the
instant of its transmission till its return, the range is found.
Such rangefinders can have a range of 10 k m with a beam
divergence of 0.5 mrad. Laser rangefinders are mounted on tanks
and fitted in helicopters.
4.5.2.2 T a r g e t Designation
Target designation is done by illuminating the target with a
laser beam, and a detector in the nose of the aircraft or artillery
51
52
Introduction to Camouflage and Deception
shell homes on the reflected light from the target. It can work u p to
10 km range. The accuracy of designation depends upon the
narrowness of the beam. The designator can be used by a soldier on
the ground or it can be used from a n aircraft.
4.5.2.3 Target Illumination
Laser illuminators enhance the performance of image
intensifiers by illuminating the target when the ambient light is not
adequate.
4.5.2.4 Tracking
Laser tracking is highly advantageous especially for operations
at night and low level light conditions. The requirements for tracking
vary with the nature of the target, viz., missile, aircraft, hostile target,
and cooperative target. In all the cases, along with a conventional
radar, the laser tracker is used. Initially, over a wide field of view,
radar is used to acquire the target. Once it is acquired, then it is
handed over to a laser tracker. The principle of laser tracking is the
same as radar tracking. A laser beam has high directivity compared
to microwaves used by radar. The visible and the near infrared
waves used by laser are much shorter, and hence the size of the
laser tracker systems is smaller. The smaller wavelength and good
directionality associated with laser systems make them less
susceptible to interference than the radar systems where multipath
effects become pronounced.
Further developments in lasers include application of laser
holography with the help of which three-dimensional view of a scene
can be displayed in front of the pilot in a n aircraft.
Photography
Photographylo is widely used in military reconnaissance.
Cameras of different types which can be mounted on different
platforms are used in photographic reconnaissance. The mission
can be strategic or tactical. Photography has several distinct
advantages over other sensors.
4.5.3
4.5.3.1 Platforms
The platform can be either: (i) ground-based, (ii) airborne, or
(iii)space-borne.
Ground-based cameras are not different from carnezas used in
normal photography. The airborne platforms are aircraft, drones
and remotely piloted vehicles (RPVs).The space-borne platforms are
satellites.
Visual Camouflage
4.5.3.2 Photo-reconnaissance - Aerial
Photographs can be taken from different altitudes. They can be
taken vertically, obliquely, side-looking, fonvard-looking, and
panoramic, depending on the requirement. The velocity of the
platform carrying the camera can also vary between wide limits.
The nature of photo-reconnaissance is determined by the nature of
the mission. Table 4.2 gives the different types of photoreconnaissance.
Table 4.2. Different types of photo-reconnaissance
Mission
Performance
Strategic
High altitude, medium
or high velocity.
Long standoff,
medium or high velocity
Tactical
Source:
Photography
Vertical
Oblique, long range
Low altitude,
high velocity
Vertica1,side looking, panoramic,
forward-looking
Medium altitude,
medium velocity
Oblique
Military Reconnaissance - Methods and Devices. Barracuda Camouflage,
1982, DIAB Barracuda, Solna, Sweden.
Table 4.3 gives some typical cameras used in Photoreconnaissance.
Table 4.3. Cameras for photo-reconnaissance
-
- --
Type of Camera
-
-
Focal length (rnm)
Source:
-
35 mm
600 mm
135 mm
-
Field of view Main use
- - -
Wide angle
Long-focus
Panoramic
-
60"
4.5"
15"X190"
-
Low altitude
High altitude
Medium altitude
Military Reconnaissance - Methods and Devices. Barracuda Camouflage,
1982, DIAB Barracuda, Solna, Sweden.
For taking high resolution photos from a satellite, long focus
cameras are used. On tactical reconnaissance, an aircraft can have
a variety of cameras. Figure 4.6 shows reconnaissance aircraft with
pod. Figure 4.7 shows pod with cameras.
53
54
Introduction to Camouflage and Deception
&'
5'
1. Two High Altitude//Long-Range
Cameras
5. Night llluminat~onEquipment
(Flash Systems)
2. Four Low-AltitudeCameras
6. ECM Data Registration Units
3. Infra-Red Line Scanner
7. Vertical Sighting System
4. Three Low- Altitude Cameras with
Infra-Red Film
Figure 4.6. Reconnaissance aircraft with pod.
Source:
Military Reconnaissance - Methods and Devices. Barracuda Camouflage,
1982, DIAB Barracuda, Solna, Sweden.
Frame Camera
2 Positions
Low Altitude
Panoramic Camera
H~ghAltitude
Panoram~cCameras
2 TV Cameras
2 Positions
Figure 4.7. Pod with cameras.
Source:
Military Reconnaissance - Methods and Devices. Barracuda Camouflage,
1982, DlAB Barracuda, Solna, Sweden.
Factors Affecting Photographic Reconnaissance
The various factors l o which influence photographic
reconnaissance are:
Scene characteristics
Atmosphere
Camera characteristics
Platform characteristics
Film characteristics
4.5.3.3
Scene characteristics
The important scene characteristics are: illumination,
brightness contrast, colour contrast and shadows. Unless the scene
has adequate illumination, either from sun or by artificial means,
Visual Camouflage
satisfactory photographs cannot be taken. However, low light levels
can be compensated for by using more sensitive films. But a t the
same time, at higher sensitivities resolution becomes less. Brightness
and colour contrast in the scene help in the detection and
identification of targets through photography. The nature of shadows
depends upon the position of the sun a t the time the photograph is
taken. Shadows are very useful in the evaluation and identification
process.
Atmosphere
As the altitude increases, the atmosphere adversely affects
contrast between details in aerial photography. Weather conditions,
especially haze, adversely affect the quality of photograph.
The camera characteristics and platform characteristics are
discussed below.
4.5.3.4 Aerial Camera
Resolution is the most important quality of a photographic
system. It depends upon several factorsI0, viz.,
Focal length and quality of the lens
Photographic film
Movement of the platform
Vibrations
Airstream outside the platfonn
Atmosphere
Scene contrast and illumination
The smallest details that can be reproduced on the film depend
on all these factors. On the negative of the film, we can theoretically
resolve 0.0 1 - 0.02 mm if the camera lens as well a s the film employed
are of high quality.
A s the platform moves, there will be image motion which blurs
the image. Besides the movement of the platform, vibration and
angular rotation of the viewing system also affect the quality of the
image. These effects can be reduced by employing image motion
compensation techniques. Vibration can be reduced by proper
mounting of camera. The passage of airstream in front of the camera
depends on the type of aircraft, aircraft altitude and speed, and the
camera mounting in the fuselage.
Resolution is expressed normally in radians or milliradians or
degrees. It is more conveniently expressed in terms of linear
dimensions of the target on the ground. For imaging sensors it is
expressed in line pairs per mm.
55
56
Introduction to Camouflage a n d Deception
Figure 4.8 gives the ground resolution in meters a t different
target distances from the ground for camera lenses of three
'different focal lengths. Table 4.4 gives details of cameras used in
aircraft and drones in terms of focal length, type of mounting
and mission.
Distance to target (km)
Ground Resolution (m)
Figure 4.8. Ground resolution at different target distances.
Source:
Militaly Reconnaissance - Methods and Devices. Barracuda Camouflage,
1982, DIAB Barracuda, Solna, Sweden.
Table 4.4. Focal l e n e h and camera mountine for different missions
Focal length (mm)
35
70
Source:
Camera mounting
Mission type
Vertical; oblique
Vertical; forward
oblique; oblique
panoramic
Vertical; forward
oblique
Vertical, panoramic
Vertical, panoramic
Vertical
Low altitude, high velocity
Low/medium altitude, high
velocity
Medium altitude
Medium altitude
High altitude
High altitude
Military Reconnaissance - Methods and Devices. Barracuda Camouflage,
1982, DIAB Barracuda. Solna, Sweden.
Visual Camouflage
Magazine and framing are two other important factors associated
with the camera. An overlap of 60 per cent can produce stereoscopic
vision. The camera magazine can have 100 m of 70 mm film. A
frame rate of 6 pictures per second is adequate for typical high
velocity/low altitude mission.
One important type of frame camera is multiband camera.
This camera photographs a scene simultaneously in individual
spectral bands, rather than in a single broad band. Depending on
the number of spectral bands in which photographs of the scene
are taken, it can have four lenses or seven lenses or even u p to a
maximum of nine lenses. On the same film, photos in all the spectral
bands are taken. Alternatively, there c a n be a number of
independent cameras, corresponding to each spectral band. Such
photographs, when observed simultaneously under a n additive
colour viewer, provide tonal enhancement. Objects which otherwise
are not distinguished in single broad-band photography can be
distinguished in multiband photography.
The 12S airborne multiband camera (manufactured by
International Imaging System, USA) has four separate lens-filter
assemblies. It forms four images, each of size 89 mm x 89 mm on
the film of area 240 mrn x 240 mm. The multiband camera flown in
the Skylab had six lenses. It gives six photographs of the same
scene in six different spectral bands covering the visible and near
infrared regions.
Latest in the development of photographic cameras is the large
format camera placed on board the Space Shuttle 17. It was
developed by Itek's optical division under a NASA contract. Each
picture frame covers about 165 km x 335 krn from the 220 km
orbit and has a spatial resolution of about 1 lm.
Film
The commonly used films for military reconnaissance are
panchromatic and infrared black and white. Colour and infrared
false colour films a r e also used for special purposes. The
panchromatic film r e s p o n d s to t h e visible region of t h e
electromagnetic spectrum (0.35 to 0.67 pm). It gives the image in
grey tones. Black and white infrared film is specially sensitized to
register the near infrared region. Figure 4.9 gives the colour
sensitivity of different films.
57
58
Introduction to Camouflage and Deception
300
400
500
600
700
800
900
Wavelength (nm)
Figure 4.9. Relative colour sensitivity of different films.
Source:
Military Reconnaissance - Methods and Devices. Barracuda Camouflage,
1982, DlAB Barracuda, Solna, Sweden.
Adugntages/disadvantages of Photographic
Reconnaissance
Advantages:
(a) Very high resolution.
(b) Pictures can be had in 3-dimensions under stereoscopic
observation.
(c) By comparing the images obtained in different parts of the
spectrum, additional information can be obtained.
Disadvantages
(a) Photography needs illumination on the scene. During day time
it is sunlight but during night, light from flash or laser is
necessary.
(b) Visibility must be good. Visibility will be affected by clouds,
fog, haze etc.
(c) Information processing takes long time.If the film processing
is done only after the aircraft has landed it needs at least two
4.5.3.6
Visual Camouflage
(d)
hours from the time the mission starts till decisions can be
made on the basis of the information obtained from the
photograph. Although in-flight processing a n d d a t a
transmission to the ground are possible, they are not used to
a great extent.
Since the data are not available directly in the electronic form,
they are not immediately amenable to digital processing. For
unmanned space flight, the film has to be ejected out for
recovery which complicates the system.
4.5.4
TV Cameras
TV cameras located in the nose of an RPVIO can be used for
aerial reconnaissance. The picture can be relayed to the operator
on his monitor. It can also be recorded for later evaluation.
Tiros- 111, a meteorological satellite launched in 1960, carried
a vidicon camera for routinely viewing the earth for world weather
studies. The best example of high resolution TV camera was the
return beam vidicon (RBV) used in the LANDSAT series". The
spectral bands (LANDSAT 1 and 2) were 0.475 - 0.575 ym, 0.580 0.680 pm and 0.698 - 0.830 ym.
4.5.5
Optical Mechanical Scanners
O n a multispectral scanner (MSS), the radiation reflected/
emitted from the scene is intercepted by a scan mirror which diverts
the radiation to a collecting telescope from where it enters a spectral
dispersing system. The radiation dispersed into different spectral
bands falls on the corresponding detectors. In the visible region,
both photomultipliers and photodiodes are used as detectors. These
cover the range 0.4 to 1.1 pm.
Typical examples of airborne MSS include 1P Channel M2S
developed by Bendix (USA).The best possible improvement has been
probably achieved in Thematic Mapper (TM). It has seven spectral
bands in visible, near infrared, middle infrared and thermal infrared.
It provides 30 m resolution in the visible, near and middle infrared
bands, and 120 m resolution in the thermal infrared from an orbiting
altitude of 705 km.
Linear Imaging Self-scanning Sensor (LISS)
4.5.6
In this the basic sensor is a linear array of solid-state
detectors1'.The array may be made ofphotodiodes, phototransistors
or charge-coupled-devices (CCDs). CCDs are discussed in the
chapter on infrared camouflage. The French Space Agency launched
an observation satellite system (SPOT)which carried a CCD-based
camera. This camera has a resolution of 10 m in the visible region
and 20 m ia? the near infrared region a t a flight altitude of 805 km.
59
60
Introduction to Camouflage and Deception
4.5.7
Military Satellites
Ever since space age began, more than 1600 satellites" have
been launched, 60 per cent of which are military satellites. USA
collects data from four separate types of reconnaissance satellites.
These were area-survey satellite, close-look satellite, Big-Bird, and
KH- 11. They all carried an imaging sensor. They had the ability to
manoeuvre in space to place themselves in a particular orbit at a
particular time.
The area-survey satellites were used during the 1960s and
early 1970s to obtain broad photographic coverage of large areas.
Each satellite had a short life (around a month) and carried cameras
that took photographs with wide angle lens. The film was
automatically processed on board the satellite, scanned by a digitiser
and the data transmitted to the earth.
These satellites burnt upon re-entry and so were not reusable.
The 'close-look' satellite employed cameras to obtain high resolution
photographs of areas of interest. A t a n altitude of 150 km the
photographs were expected to have a resolution between 0.25 m
and 0.5 m. Once a roll of film had been exposed, it was ejected in a
capsule that was either retrieved in mid-air by an aircraft or was
picked u p a t sea. The lifetime of these satellites was only five days in
the early 1970s.
The satellite, Big-Bird combines the reconnaissance attributes
of both the area-survey and close-look satellites a s it carries sensors
of both high and low resolution images. The Big-Bird was first
launched i n the early 1970s. The sensors were primarily
photographic, and, a s with the close-look satellite, the film was
returned to earth by capsule.
The satellite series KH-11 which was first launched in 1976
was used by the military but operated by the CIA. These satellites
fly on a relatively fixed orbit at an altitude of 250 km and cany a
multispectral scanner similar to Thematic Mapper. It has a resolution
of 0.20 m and sensor is a CCD.
FACTORS AFFECTING RECOGNITION IN THE
VISIBLE REGION
In the visible region, object detection/recognition/identification,
to a large extent, is carried out by the sensor - the human eye unaided,
or aided by an optical instrument or an electro-optical system, or
through a photograph of the object. Visual perception is a three-stage
process. The first stage depends on the object, its physical properties
and the background in which the object is located, and the properties
4.6
Visual Camouflage
of light. The second stage is a physiological process which depends
on the construction of the eye and how it forms an image of the object
on the retina. The fhird stage is a psychological process in which the
image formed on the retina is interpreted by the brain leading to the
recognition of the object. The retinal image, which is physical, is
transformed into a mental image as interpreted by the brain based
upon previous knowledge.
Under this section we shall only deal with stage one - the
properties of the object, its background and the light reflected by it
which enters the eye. The physical properties of the object which
contribute to recognition or identification. These are particularly
relevant in the interpretation of aerial photographs are a s follows:
4.6.1
Shape
Every object has a characteristic shape, bounded by surfaces
and contours with which we are familiar. The observer's previous
knowledge about the object and his familiarity with it will greatly
help in the identification process, even if the quality of image as
perceived by his sight is not good. Shape is a very important
characteristic of an object by which identification can be conclusively
done.
4.6.2
Size
The size of a n object is another useful parameter on which
identification may be based. Familiarity or previous knowledge about
the size is a very useful clue.
4.6.3
Colour
The light reflected by a n object depends on its colour. Different
objects reflect different amounts and wavelengths of light energy.
The contrast that is produced by differential reflection of light by
different objects and its background aids in interpretation.
4.6.4
Texture
Two objects may have the same colour, but if their optical
textures are different, they can be distinguished a s two separate
objects. The optical texture depends on the surface condition - degree
of smoothness and roughness. The light and shade effqcts are
produced by texture.
4.6.5
Shadow
Even if the object is not clearly seen, it can be identified from
the shadow of the object. This is especially an useful clue in aerial
photo-interpretation.
61
62
Introduction to Camouflage and Deception
Pattern
The pattern is a characteristic feature of many man-made
objects and of some natural features. Individual objects in a pattern
may not be discernible but if the pattern is perceived, the objects
constituting the pattern can be inferred.
4.6.6
4.6.7
Site
Knowledge of location of the object with respect to terrain
features or other objects is helpfubl in object identification.
Association
All solid objects are presented to the eye a s elements of colour,
varying in size, shape, texture and hue and saturation, and lightness
and darkness12.These differences enable us to distinguish one object
from another. If these differences are made to vanish, one object
cannot be distinguished from another. Some of the objects are so
commonly associated with one another that the presence of one
indicates or confirms the other (e.g., tank with its associated track
and gun barrel).
All military objects, e.g., a tank, a n aircraft or a ship, have
their characteristic shapes, sizes, textures, site and association and
shadows from which (if they are not adequately camouflaged), they
can be identified by visual means with the naked eye or an eye
aided with a n optical instrument or electrooptical system or a
photograph.
4.6.$
BASIC PRINCIPLES OF CAMOUFLAGE IN THE
VISIBLE REGION
The various methods by which military objects are camouflaged
in the visible region may be divided into four groups:
Hiding,
Blending,
Deception, and
Miscellaneous techniques.
4.7
Any single method may not adequately camouflage the object,
and, a s such, in any actual situation, two or three methods are
simultaneously used.
Hiding
In hiding, the objects are physically hidden by the use of
natural materials such as vegetation -natural and cut - and artificial
materials such a s nets, screens etc.
4.9.1
Visual Camouflage
Camouflaging of military objects by vegetation is by far the
best method. A s such, wherever adequate vegetation is available, it
should be put to use. It is a countermeasure against a variety of
sensors. Besides live vegetation, cut vegetation can also be used to
a limited extent. The disadvantage with cut vegetation is that, with
time, its chlorophyll content drops, giving rise to colour contrast.
Besides, the concealed objects can be detected in infrared
photography.
4.7.1.1
Arboriculture (in desert region)
In regions where there is plenty of vegetation, it can be
advantageously used for concealment of military objects, small and
big. But where vegetation is scarce, especially in arid and semi-arid
regions, Saxena and Solanki13give a detailed account of desert and
semi-desert plant species a n d their possible application for
concealment of military objects. In these regions, extremes of
temperature, moisture, stress, and nutritional deficiency are the
principal limitations for plant growth and development. Under these
hostile conditions, only a limited number of species survive. The
environmental stresses are responsible for a wide range of
morphological and physiological adaptations such as reduction in
plant height, leaf size, change in growth form, photosynthetic
activities taken over by stem and deep root system etc. But these
characteristics cannot meet camouflage requirements.
Determining how best the prevailing vegetation of arid regions
might be utilised for concealment will be the first step. The use of
existing hardy shrub species may be drawn in such a fashion that
the absence of a clear bole and the spreading crown cover are
overmasked by their multiple-stemmed and dense top &over.
Wherever the shrub cover is dense, small size military equipment
may be concealed.
Before planning of plantation of appropriate species which
might provide adequate camouflage, we shall discuss the actual
distribution pattern of natural plant communities in arid regions.
Distribution of vegetation in arid and semi-arid regions.
While discussing the vegetation distribution in these areas, we
may divide them into three zones13: (a) 100-200 mm rainfall zone,
(b)200-300mm rainfall zone and (c) 300-450 mm rainfall zone.
(a]
100-200mm rainfall zone
This zone is characterised by dwarf shrub communities and
grassland. On flat, gravelly and pediment plains, an open shrub
community of Capparis decidua and Zizyphus nummularia are
found. On the sandy tracts, Calliponum polyponoides, Haloxylon
63
64
Introduction to Camouflage and Deception
salicornicum, Calotropisprocera, and Leptadenia pyrotechnica grow
easily. In this low rainfall zone there will be high intensity of sand
dunes. Some of these sand dunes are bare while others have coverage
of shrub species like Caligonum leptadenia and Acacia jacquemontii.
These dunes are capable of supporting shrub species with fairly
high density plantation of shrubs; besides providing stability to the
dune, they also help in camouflaging aspects. Fully developed shrub
species of CaligonumA jaquemontii, Calotropis or Leptadenia can be
utilised for concealing military movements. The rocky and hilly
habitats cannot support even shrub species adequately and therefore
remain open. Growing of vegetation on such hilly areas is a difficult
task due to complete loss of soil.
200-300 mm rainfall zone
In this zone, the sand activity is comparatively less, and one
can find a mixture of trees and shrubs; while shrub species dominate
on sand dunes, a few widely scattered trees are also met with. Acacia
senegal, Tecomella undulata, Prosopis cineraria and Salvadora
oleoides grow on the lower flanks and/or leeward side of the stabilised
sand dunes. The plains having sandy clay loam soils can sustain
Salvadora, Prosopis, Capparis species. Alluvial flats with sandy loam
soil have Prosopis having a height of 10-14 m with 15 to 20 plants/
ha.
300-450 mm rainfall zone
This zone consists of a flat alluvial plain. It supports good growth
of Prosopis cineraria (30-120 plants/ha). In hilly areas, one finds
Acacia senegal and Anogeisus pendula. In this region, Prosopis,
Tecomella, Maytenus and Acacia senegal grow well with fairly good
crown which are adequate for concealment of military objects.
Camouflage plantation for desert region
Acacia tortilix, Prosopis chilensis, Acacia raddiana, Acacia.
nubica, Colophospernum mopane, Acacia salicina, Dichrostachys
nutans Parkinsonia aculeta, Holoptelia integrifolia, Zizyphus and
Spinachristii are suitable species for arid tract.
For semi-arid tract, Eucalyptus camaldulensis, E. terminalis,
Acacia auricutifomia, Cassia siamea, Leucaena leucocephala and
Peltoforumferugianum are the suitable species.
(b)
For rainfall above 350 mm some of the promising species are:
Azadirachta indica, Ailanthudus excelsa, Albizzia lebbek, Acacia
nilotica, Hardwickia binata. All these species have fairly dense crowns
and tall trunks. Thus for camouflage by arboriculture in arid/
semiarid areas, the above species, when properly grown, are suitable.
Visual Camouflage
Acacia tortilis and Frosopis julifora species are the best suited
for arid zone afforestation. Of the two, Prosopis julifora h a s
tremendous regenerating capacity in nature. This species has been
found to colonize in all the habitats of desert regions including the
saline areas. Ecological observations have indicated that Prosopis
julifora density per unit area on the wastelands increases during
drought years compared to normal years. With continuous prolonged
droughts, Acacia tortilis succumb, with majority of its saplings
becoming casualities, but it is comparatively sturdy. A. juliflora is
more salt-tolerant. Acacia tortilis has large crown size in arid tract.
Majority of Prosopisjulif2om are shrubby, and amongst the population
a few plants bear clear bole and distinct spreading crown in umbrella
shape. Selection of seed from such species will be ideal for camouflage
purposes. Amongst exotic shmb species, Dichrostachys nutans and
Colophospermum mopane are promising in desert tract. The former
is exceptionally drought-hardy and under stress it throws root
suckers in all directions. Colophospermurn mopane is also a droughthardy, disease-resistant and self-regenerating shrub for sandy
terrain.
In general, a mixture of indigenous and exotic species may fulfil
the requirement of camouflage application. Depending upon the size
of the military objects to be concealed, species may be selected, and
their density and pattern of plantation may be decided. While growing
vegetation for camouflage purposes, care must be taken that the
vegetation should not become an isolated green patch, which might
attract attention and become a target.
4.7.1.2 Screens
A variety of screens, such as horizontal, vertical and overhead
types, are used for concealing stationary military objects. These
screens act as physical barriers between the target and the sensor.
Besides, there are smoke screens which provide temporary
concealment in situations such as movement of troops.
(a)
Horizontal screens
The horizontal screen is put up over the object parallel to the
ground and provides protection against aerial reconnaissance. The
screen should merge with the natural surroundings. It should be of
irregular geometry and the size must be such that it adequately
covers the object. Its height from the ground and with respect to the
prevailing vegetation must be such that it should not stand out
under stereoscopic examination. The screen may be made out of
wire or rope, with proper supports and anchorage. It may be
garnished with artificial material which blends with the background.
65
66
Inttoduction to Camouflage and Deception
(b)
Vertical screens
Vertical screens provide concealment against observation from
ground. They are put up around the entire object, or on the side
from which the enemy is likely to observe. Such screens may be
made out of locally available material such as branches of trees,
bushes or wire mesh. These are temporary measures against enemy
observation. The movement of troops and vehicles can be concealed
for short duration. Similar to the horizontal screen, the vertical
screen should not look man-made but should blend with the
background.
(c)
Overhead covers
This type of screen covers the object and the surrounding
ground near the object. The cover should blend adequately with the
background.
4.7.1.3 Obscurants (Smoke screens)
Passive countermeasures are effective in the case of stationary
targets. For a military object such as a vehicle when in motion,
passive countermeasures are ineffective because any movement is
easy to detect by methods ranging from visual observation to Doppler
radar.
One of the methods for hiding vehicles in motion for short
duration is the deployment of smoke. This is known a s concealment
by obscuration. An obscurant is a medium inserted between the
target and the observer, which by its interaction with the radiation
brings down the signal strength below the sensor threshold. The
medium is a man-made aerosol which consists of dry and wet
particles dispersed and suspended in air.
Obscuration countermeasures are discussed a t length in
references 14-16. Figure 4.10 shows the mechanisms that come into
play in a n obscurant which reduces the strength of the radiation
from the target. A s the radiation from the target passes through the
obscurant, it undergoes absorption, scattering, emission and
transmission. All these effects alter the spectral characteristics of
the target, target contrast with its background, background clutter
etc.
The degree of alteration in the spectral characteristics of the
target depends on the properties of the aerosol, viz., mass
concentration, size, distribution of particles, vapour condensation,
liquid droplet evaporation, optical scattering and absorption, and
chemical potential of the aerosol. Besides the properties of the
aerosol, the meteorological parameters, viz., wind, temperature,
relative humidity, turbulence and radiation from sun, sky, clouds
etc. alter the propagation characteristics of the target radiation
Visual Camouflage
Obscurant
Scattering
b
Background
Transmittance
(a) Direct Transmission Losses
(b) DiffuseMultiple Scattering and Path Radiance
Figure 4.10. Reduction of strength of radiation by an obscurant.
Source:
Reproduced with permission from "The Infrared and Electro-optical Systems
Handbook" published by ERlM and SPIE Optical Engineering Press, USA.
Countermeasure Systems. Edited by David H Pollock, Vol7, Chapter 6 Obsucuration countermeasures by Donald W Hoock (Jr.)and Robert A
Sutherland (1993).
passing through the aerosol. Further, the methods by which the
aerosol is generated determine the rate of production of particles,
particle settling etc. which also influence t h e propagation
characteristics.
The two important quantities associated with the obscurant
on which the transmittance depends are obscurant concentration
and its extinction coefficient. The transmission of electromagnetic
radiation depends principally on the concentration and optical
properties of the aerosol. The optical properties are influenced by
the particle size, refractive index at different wavelengths, shape,
mass, orientation of particles etc.
Calculations have been made of the amount of obscurant needed
to produce total concealment. A known amount of obscurant can be
introduced which cuts off the transmission below the sensor
threshold. When the area of the obscurant cloud is larger than the
67
68
Introduction to Camouflage and Deception
size of the target, total target obscuration can be accomplished. The
available obscurants probably absorb electromagnetic radiations
effectively in the visible and infrared, including laser radiations.
Smoke may be deployed either by individual vehicles or on a large
scale to screen the movement of armoured units. In the former case
the smoke is deployed by means of vehicle-mounted grenade
launchers.
Of the different screening smokes, the conventional white type
is effective only against visual observation. Smoke grenades (which
can be launched from armoured vehicles) require two seconds to
begin to become effective which add to the response time of
countermeasures based on them.
4.7.2
Blending
In camouflaging by blending, the object is made to blend with
the background. The object becomes an integral part of the
background and is hence rendered invisible, and thereby
unrecognisable. Camouflagingby blending involves optical principles
which produce illusory effects. Although the object is very much
present, it cannot be seen in recognisable form. These are the very
principles which nature has applied to camouflage various animals12.
Several examples of this kind have been described in Chapter 3.
Colour Matching
The first requirement for an object to blend with its general
background is that the colour of the object should be the same as
that of the background. How far is this feasible for effective
camouflage? Secondly, is colour matching alone enough? Firstly,
let us take stationary objects for example, a building uniformly
painted with the same colour as that of the background. This object
then becomes less conspicuous. Now let u s take an object in motion
for example, a tank. As it moves, its background will not be uniform,
but generally keep on changing in colour. So a tank painted with a
single colour cannot blend with all backgrounds. Further, even in
one and the same background, besides colour, there should be
matching of texture. Seasonal variations also bring in changes in
the colour of the background. All these factors make u s infer that
an object painted uniformly with a single colour cannot provide
adequate camouflage under all possible conditions, although it makes
the object less conspicuous under limited conditions.
One possible solution for taking into consideration different
backgrounds having different colours is that as the object moves
from one background to another, the colou on the object should
automatically change to that of the background. Till today there are
no such materials available, Materials like chromogenics may meet
4.7.2.1
Visual Camouflage
such a requirement in future.But, examples can be cited from nature
where animals rapidly and sometimes instantaneously change their
colours to those of background. Chameleons are one such example
which exhibit marked and rapid colour adjustments ranging from
dark brown to sea green1*-17.
Besides colour matching which makes an object less
conspicuous, let us consider the various other conditions that are
to be satisfied for effective camouflage.
4.7.2.2
Countershading
Even when an object has the same colour as that of the
background, due to light and shade effects we can recognise the
object as discussed in Chapter 3. The light and shade effects are
produced by the upper surface receiving more light than the
underparts. These effects lighten the tone of the upper parts and
darken the lower parts that are in shade. Thus a solid object of
uniform colour matching with the background shows up due to its
nonuniform illumination and brightness.
Light and shade effects help u s to distinguish between a disc
and a sphere or between the side of a cube and the side of a cylinder12.
In all these examples, the presence of shade is an important
factor which gives the appearance of projection or of depth. A s such,
a solid body can be distinguished by means of light and shade even
when it matches well with its background in colour and texture.
The light and shade effects can be flattened by countershading
surfaces receiving more light and counterlightening those surfaces
which are in the shade using properly graded tones. This removes
the appearance of depth and three-dimensional perception, and
thereby the object appears optically flat.
Countershading can be produced by blended patternsI2.Figure
4.11 shows such patterns. They may consist of alternate black and
white markings, and they can be lines or squares or spots. When
these patterns are observed from successively increasing distances,
the patterns blend to form a uniform grey half-tone. By altering the
relative proportion of black and white in the pattern, we can arrive
at any desired value of grey tone in order to destroy the light and
shade effects.
The countershading effects can be advantageously used in the
case of aircraft and guns. When an aircraft is viewed from above,
the upper portion looks brighter and the lower portion darker. By
proper countershading, the light and shade effects can be
destr~yed'~.
Thus, besides colour matching, countershading also is
necessary for effective camouflage.
69
70
Introductiott to Camouflage and Lleception
Figure 4.11. Patterns which produce countershading effects.
4.7.2.3 Disruptive Colouration
Obliterative shading is not possible for all directions of incident
light. As such, colour matching and simultaneous countershading
is not possible under all conditions. One of the most important
principles of camouflage is that produced by dazzle12. It is an
American term which came into popular use during war in connection
with camouflage painting of military objects. When an object is
painted with irregular patches of colours of varying contrast and
tones, the attention of the observer is diverted away from the actual
shape of the object but drawn towards the dazzling patches. The
patterns which attract attention do not bear any relationship with
the shape of the object with which the observer is familiar. Several
examples can be cited from nature (already discussed in Chapter 3
where many animals escape detection by their enemies by wearing
disruptive patterns on their bodies. The optical principles behind
these patterns create confusion in the mind, which is responsible
for preventing or delaying the recognition of the true nature of the
object.
For effective camouflage, the patterns have to follow definite
o p t i d principles. The patterns, the colours and tonal contrasts have
Visual Camouflage
to be accordingly chosen. The effect of a disruptive pattern is greatly
enhanced when some of its elements closely match the background
while others differ sharply from it. This is known as differential
blending which implies blending of some components, and others
strongly differing in colour and tone from the background. It is not
possible to correlate the portions which stand out conspicuously
with the real shape of the object as a whole. The disruptive pattern
which creates an optical illusion becomes very effective when strongly
contrasted tones are employed. The greater the contrast in tone
between adjacent elements in a pattern, the greater will be its
disruptive function(princip1eof adjacent contrast). These principles
have been already discussed in Chapter 3 under camouflage in
nature.
Besides disruption of surface, obliteration of contour is also
equally important. Every solid object has a characteristic boundaxy
the shape of which enables us to identi9 it. In order to camouflage
an object, the familiar contour of the object must be broken. How a
contour can be broken is illustrated in Figure 4.12.
Figure 4.12. Disruptive patterns for contour disruption.
71
72
Introduction to Camouflageand Deception
In each of these four diagrams, half the area is covered by
white and the other half by black colour. As these figures are observed
from successively increasing distances, each figure starts blending
with the background. The blending distance for each figure is not
the same. The important optical principle is that for disruption of
contour, adequate number of elements of the pattern should cut
across the contour. Another important aspect associated with the
patterns is that, especially in the case of permanently stationary
objects, the pattern drawn on the objects should closely resemble
the surroundings.
4.7.2.4 Shadow Elimination
So far we have discussed how camouflage can be accomplished
by colour resemblance, obliterative shading and dispruptive
colouration. There is another important aspect which must be taken
care of for effective camouflage. A military object which is otherwise
well-camouflaged by the methods mentioned above can be detected
by the shadow it casts on the ground under the action of sunlight.
The shadow cast by the object may be both conspicuous in tone and
characteristic in form. In aerial surveillance shadows, can be very
well seen.
The character of the shadow depends upon several factors the position of the sun, i.e., the time of the day and season, or the
position of any other source of light which falls on the object, or the
nature of surface on which the shadow is formed. If the surface is
flat or bare ground or a wall, the shadow will be very clear, retaining
the shape of the object. If the shadow is cast on a n uneven surface
the shadow will not have continuity of outline. If the shadow falls on
numerous irregular surfaces lying a t various angles and a t different
levels., viz grass, shrubs, or foliage, there will not be a clear shadow,
but it will be diffused. Shadow elimination or distortion becomes
very important against aerial observation.
The various methods for reducing detection probability with
respect to shadow are:
(a) For an object like a tank, shadow may be studied for different
positions of the sun and for different orientations of the object
(0- 360")with respect to the direction of sunlight and detection
probability in each case recorded. From the analysis of such
data, Defence Laboratory, Jodhpur, has arrived at optimum
parking positions for minimum detection probability. These
would largely depend on the time of the day and the season.
Wherever it is feasible the tank may be accordingly parked.
The orientation of the body must be such that the area of the
shadow is minimum and inconspicuous. The long barrel of
the tank gun, in particular, gives a conspicuous shadow.
(b)
Another way of making a shadow less conspicuous is keeping
everything low, as lower structures cast shorter shadows.
(c)
Wherever possible, if a military object is kept under the shadow
of another object, the shadow of the former may be eliminated.
(d)
Finally, shadows can be distorted by using distortion masks.
Such masks can be used for distorting the shadow of the
tanks barrel. Also by keeping military objects in pits and
trenches partial concealment can be attained.
Deception
Deception, whether it is in nature or in war, is implicit in
camouflage. To make any object unrecognisable from its real form
is itself deception. But besides the various types of camouflage
methods and techniques we have discussed so far, there is another
form of camouflage in which dummies and decoys are used to
simulate real activity. This form of camouflage is specifically known
as deception. Quite often, deception equipment along with normal
camouflage is used for effective combat survivability of military
equipment.
Deception in the form of disinformation is also employed in
the battlefield. Deception in all its aspects is discussed in chapter 7.
CAMOUFLAGING OF MILITARY OBJECTS BY
4.8
DISRUPTIVE PATTERN PAINTING
By and large, all static military objects (vehicles,tanks, aircraft,
hangers, ships, etc.) are camouflaged by pattern painting. In visual
camouflage the three types of painting used are: (i)protetive painting
(ii)disruptive pattern painting, and (iii)imitative painting.
Protective painting which uses a single colour is used for
camouflaging military objects in areas with one overwhelming colour.
Disruptive patterns consist of elements of irregular geometry
of two or more shades painted a t random. The predominant colour
of the terrain is chosen a s the main colour, and the other colours,
some of them lighter and others darker than the background colour.
The size of the elements and the distance between adjacent elements
are determined by the distance from which the enemy is likely to
observe.
When a disruptively painted object is viewed from successively
increasing distances, initially the object can be clearly seen, but on
further increasing the distance, a stage is reached when there will
be maximum surface and contour disruption, and thereby the object
blends with the background. This is the distance for which the
pattern is designed. When the distance of observation is further
4.7.3
increased, because ofloss ofm1ution, the adjamt elenrents cannot
be seen as separate elements, disruption fails, colour differences
vanish, and dl the colours blend into a single colour. Until recent
years disruptive patterns were being dram manually and hence
were subject to personal preferences. Now-a-days they can be
generated in a great variety by computer techniques (as described
later).
Figure 4.13 shows a disruptive pattern generated by a computer
at the Defence Laboratory, Jodhpur, drawn over a mxtande.
In imitative painting, the background surrounding the object
is imitated on the object. This is done in the case of permanent
installations such as buildings,
4.8. X Studies on Disruptive Pattern Painting
Not many studies appear to have been carried out to waluat~
the effect dvariables, viz., pattern colour, pattern contrast, number
of coIours used in the pattern painting, on the degree of difficulty in
detecting the target.
Visual Camouflage
Humphreys a d Jarvis18reported that pattern painting disrupts
signature characteristic, reduces target/background contrast a i d
distorts the vehicle's geometric lines and overall configuration. It
was concluded that camouflage pattern painting is an effective
technique whicR reduces visual and near infrared ground target
acquisition from ground or air observation.
Marrero-Cmacho and M ~ D e r m o talso
t ~ ~ concluded from their
studies that pattem painting reduces the probability of detection of
tactical military vehicles. BucklinZ0reported from his studies on
camouflage of small items that when green objects and brown objects
were mixed in the same field, the detection rates dropped to less
than one-half the rate for either colour alone of the object tested.
When a third colour (straw) was added the detection rate further
dropped down for the green and straw items but not for brown. It
was also found that when green items and straw items were mixed,
detection for straw items dropped by one-third while rate for green
items more than doubled. Jarvis2' reported the results of a
preliminary army field test of five pattern-painted vehicles and one
olive drab vehicle in which detection and identification ranges were
the measures of camouflage effectiveness. The studies revealed that
the patterned vehicles (Germany, MERDC, US Army Mobility
Equipment Research and Development Center, Swedish a n d
USAREUR) were more difficult to detect than either an olive drab
vehicle or a vehicle painted with a British pattem. No differences
were found between German, MERDC, Swedish and USAREUR
pattern-painted vehicles or between solid olive drab and the British
pattern-painted vehicle. The German patterns have two colours,
the MERDC and the Swedish army pattern have three to four
*~
two
colours and the British two colours. G r o s ~ m a n conducted
laboratory experiments on a terrain model to assess the effects of
pattern, range, lighting and location on the ability of subjects to
visually detect tank targets. In the first experiment, each subject
observed one of the four patterns (MERDC, Swedish, German and
olive drab) a t two ranges. The MERDC took the longest to detect
and there was no difference d u e to range. In t h e second
experiment, each subject observed five patterns (British in addition
to the above) a t each of eight locations under either diffuse or
bright/shadow lighting conditions. No difference due to pattern
were observed. O'Neill, and J ~ h n s m e y e suggested
r~~
that pattern
properties which contribute to concealment are: (i)value contrast
of pattern and ground: if the overall relative brightness of the target
is significantly different from the background, detection is usually
is quite easy, (ii) colour contrast of pattern and ground, (iii) intrapattem value differentiation, and (iv)texture gradient contrast with
the ground.
75
I ~ u c t i o tno Camoujhge and LIxeptbn
Dud-Texture Gradient Pattern Painting [DTGr]
The dud texture w e n t (DTC) patternarwas developed by
the Psycholow Committee, Office of Military Leadership, U.S Military
Academy. It is derived from the US Army Pattern System developed
by the US Army Mobility Equipment Research and Development
Command (MERADCOM) at Fort Belvoir, VA. At longer ranges, the
DTG merges into a macropattern ofbroad light and dark areas which
matches the texture of the ground at that distance. At closer range,
the micropattern reso1ution provides a continuing match with the
background texture (Fig. 4.14). The figure shows one typical DTG
pattern drawn on a body of rectangular cross-section. A number of
studies have beencarried out to compare the &cacy of DTG patterns
with others. O'Neill, and J~hnrneyer~~
conducted a laboratory
experiment in which three groups of subjects viewed a series of 35
mm slides phased at decreasing rmges of targets. Group A viewed
the US Army Pattern (UGAPJ (4 colours; fortst w e n 40 per cent,
field drab 40 per cent, sand 15 per cent and black 5 per cent). Group
B viewed DTG pattern (same number of colours and relative
percentages]. Group C viewed a solid forest-green control target.
The dependent measures were the distance from the target on
detection and identification of target shape. Group B (DTG] differed
4.8.2
Figure 4.14.
pattern (tad-1W,g e k - 8 0 ? + green 10%) on a
dark men ba&gmund(lsft) and,yeUow b a c k p o d
WmI.
Visual Camouflage
77
significantly from the other two groups in that identification and
detection in the latter took place a t a farther distance.
A field validation test was conducted by ONeill, et aP5 to
compare the standard US Army and the DTG patterns in a field
environment using a n appropriate subject group representative of
observers in a combat environment. Selected subjects viewed a
pattern-painted M 113 target vehicle through the commander's sight
of a Soviet T-52 Main Battle Tank. One group observed the target
painted with the U S Army pattern and the other the DTG pattern.
Observations of the time to detection and correct/incorrect detection
of the target type were recorded for each subject. It was concluded
that the DTG pattern showed a significant improvement in the
concealment effect over the standard US Army pattern under the
field condition tested. Braaten24found in a series of small scale trials
for ground-to-ground and air-to-ground observations that DTG
pattern was more effective. He also reported factors other than
camouflage pattern which strongly influence effectiveness of
~~
out a n
camouflage. Woodruff, Boyd, and B e ~ h w i t hcarried
experimental study for assessment of relative detectability of four
different paint schemes on MI 13 vehicles viewed against six
backgrounds. They found highly significant effects d u e to
backgrounds and due to pattern and orientation.
Computerised Generation of Disruptive Patterns
Skinner, in his unclassified reportz7described a computer-aided
method for generating disruptive patterns for soldier's uniforms.
The elements of the unit pattern were generated by a modified leastsquares-fit of a polynomial to a collection of radii whose lengths are
randomly distributed within limits and uniformly distributed in angle.
The degree of smoothing was determined by the order of the
polynomial which was a random odd integer in the range 7 - 17. The
unit pattern containing 99 elements was repeated over the entire
fabric. The number of colours that could be used were four. The
area of each colour could be varied. The method produced random
shapes of closed curves approximately circular in shape. There were
no discontinuities a t the edges of the unit pattern. The patterns
were found to be effective for uniforms. The calculations described
in the report were coded in Fortran IV implemented on the Digital
Equipment Corporation PDP- 10 computer.
At Defence Laboratory, Jodhpur, Jayson a n d P u ~ p a k ~ ~
developed a mathematical model and software for generating
disruptive patterns and for superimposing these patterns on simple
three-dimentional geometrical solids. In order to generate open and
closed curve patterns, B-spline technique was employed. For drawing
a R-spline curve, polynomial in parametric form was used. For
4.8.3
simulation ofgeometrical objects boundary representationt d d q u t
has been used. Geomesy of the object is defined in terms ofpoints
and edges which together constitute the surface and all the surfaces
taken together constitute the object. For example, a cube was
represented by six bounding faces. Each face was represented by
four edges and each edge was a line drawn between two points.
Thus a cube was represented by the following structure.
(i) The X,Y,Z coordinate of six vertices;
Starting and ending point of all ~e 12 edges;
(ii)
Figure 4.15 gives a computer-generated disruptive pattern
superimposed on a truck.
4.1s. Computer-generateddisruptive pattern superimpwsd
on a buck.
4,9
CAMOUFLAQIHQ BY NETS
A camouflage n e P * has certain advantages over the methods
discussed above. The net, besides making the object blend with its
background, distorts the shadow to a certain extent It can also be
effectivein the case of objects which are mobile.
Camouflage nets together with pattern painting produce a
mixture of texture and colours giving more effective c a m d h g e .
A modern camouflage net consists of a two-dimensional
structure rectangular or square in shape, made out of synthetic
fibre. The structure consists of square meshes about 8 to 10 cm
size. They are made into modules with sizes ranging from 3 rn x 3 m
Visual Camouflage
to 10 m x 10 m, or any required size. At the periphery of each
module there is an edge cord made of synthetic material. This cord
facilitates manipulation of the net. Each module is garnished with
a PVC foil to form irregular patches. Any number of modules can be
joined to required size depending upon the size of the military object
to be covered.
4.9.1
(i)
Properties of Net Materials
The optical propertie~~~t
of the net material should
match with those of the background. In the visible and
near infrared regions, the diffuse reflectance of the net
material should closely match with that of the
background. For visual observation the colours of the
garnishing material should correspond to those present
in the background. Similar to disruptive patterns the
colours may be chosen. The density of garnishing
decreases from the centre to the periphery of the overall
net set.
Besides catering for the visible and near-infrared
regions, today there are some manufacturers who claim
that the nets they manufacture can cater for thermal
infrared and microwave regions of the electromagnetic
spectrum. In other words, today there appears to be
multispectral camouflage nets covering the
electromagnetic spectrum from the visible through
infrared to radar wavelengths. Besides, nets are
available which cater for ultraviolet reflectance;
The nets should be light in weight, and compact such
that they are easy to erect and handle;
(iii)
They should be waterproof, non-inflammable and rotproof;
(iv)
They should be resistant to bad weather conditions extremes of temperature, humidity and wind velocity.
They should also be resistant to rodents and other pests;
(v)
The nets, if reversible, can be used under two different
environmental conditions.
A typical net is shown in the Fig. 4.16.
79
80
Introduction to Camouflage and Deception
Figure 4.16. Camouflage nets for vehicles, artillery, etc.
Source:
Barracuda Camouflage - Synthetic camouflage nets. Barracudaverken,
Sweden & Barracuda, France.
4.9.2
Applications of Nets
Nets can be used for camouflaging a wide range of objects,
both mobile and fixed (personnel, vehicles, weapons, aircraft, ships
etc) in different environments - woodlands, desert, snow regions
and different seasons.
The helmet as well as body can be covered with camouflage
nets which provide excellent blending with the background. Fig.
4.17a shows a n infantryman wearing cotton helmet net and a
garment made out of camouflage fabric, while Fig 4.17b shows the
same infantryman wearing Barracuda helmet net and the Barracuda
personal camouflage net30.The superiority of the Barracuda system
can be seen from the Fig 4.18a and 4.18b which respectively show
a jeep with a trailer and a tank camouflaged by Barracuda nets.
Figure 4.19 shows how a truck is camouflaged with a Barracuda
net while Fig 4.20 shows an aircraft camouflaged by a Barracuda
net 31.
Visual Camouflage
Figure 4.17a. Infantryman wearing cotton helmet net and a garment
made out of camouflaged fabric.
Source:
Barracuda Camouflage - Synthetic camouflage nets. Barracudaverken,
Sweden & Barracuda, France.
Figure 4.17b. Infantryman wearing Barracuda helmet net and a
Barracuda personal camouflage net.
Source:
-
Barracuda Camouflage Synthetic camouflage nets. Bamacudaverken,
Sweden 85 Barracuda, France.
Introduction to Camouflage and Deception
Figure 4.18a. Jeep with trailer (camouflaged with standard net).
Source:
Barracuda Camouflage - Synthetic camouflage nets. Barracudaverken,
Sweden & Barracuda (France).
Fig 4.18b. Tank camouflaged with standard net.
Source:
-
Barracuda Camouflage Synthetic camouflage nets. Barracudaverken
Sweden & Barracuda, France.
Visual Camouflage
Fig 4.19. Camouflaging a truck by net.
Source:
Barracuda Camouflage -Camouflage nets. Practical Handbook.
Fig 4.20. Camouflaging an aircraft by net.
Source:
Barracuda Camouflage -Camouflage nets. hactical Handbook.
Manufacturers of Nets
There are several manufacturers all over the world who develop
and manufacture camouflage equipment, in particular camouflage
nets.
The various manufacturers of camouflage equipments/nets are
Barracuda Technologies, Sweden; Beivar Research, Development
and Engineering Centre, Fort Belvoir, Virginia; Teledyne Brown
Engineering, Cummings Research Park, Alabama; Brunswick
Corporation Defense Division, Illinois; Sullivan IndustrieslGeneral
Image Engineering Corporation, Utah, USA; and Bridport Aviatian
Products, The Court Bridport, Airborne Industries Limited, Essex,
U.K.These are the principal manufacturers. Other manufacturers
include Habemig Camouflage, Austria; Carntex Camouflage Division,
Copenhagen, Denmark; idex Foreign Trading, Contracting and
Engineering Company Limited, Budapest, Hungary; and Seyntex
4.9.3
63
84
Intrvduction to Camouflage and Deception
NVISA., Seyntex-laan- 1, Industriepark Zuid, Belgium3]. In India,
DMSRDE (Defence Material & Stores Research & Development
Establishment), Kanpur is responsible for design of camouflage nets
which are then bulk produced in ordnance factories.
4.10
PSYCHOLOGICAL CAMOUFLAGE
Even in the case of a large number of detectors operating over
a wide range of the electromagnetic spectrum, ultimately, it is the
visual imagery which is deciphered by interpreters, observers or
pilots for immediate situational assessment and action. The role of
the human being is therefore all important. Any research work in
this area has to deal with target and observer variables which would
lead to a disruption in the detection, recognition and identification
of military targets in a specified set of conditions. This type of work
has to center around visual information processing which involves
the analysis of visual stimuli which aid target detection, recognition
and identification. Certain basic features and the way in which these
features are combined are important in this process. Lowered
detection is caused by disruption and incorrect combinations of
features which result in incoherent information to the observer. These
aspects of information processing can be dealt with and reliably
indexed by psycho-physiological parameters like the Event Related
Potentials (ERPs),the EEG measures and parameters of autonomous
nervous system (ANS)activiV2.
Neurophysiological Principles of Visual Perception
According to Sokolovs
of visual perception a n object in
the visual field produces a n external model based on the physical
attributes of the object such a s size, shape, colour, texture etc. The
external model is produced a t the sensory level. Perception is an
end result of a complex stream of sensory inputs. The brain evokes
an internal model by comparing the external model with innumerable
internal models which are known a s memory traces or engrams.
Thus, by picking u p a n internal model which closely matches with
the external model, the brain recognises the object.
The theory of recognition by component (RBC)explains that an
object is recognised by recognising its component parts rather than
by simultaneous processing of constituent sub- part^^^,^^. According
to the RBC theory, components may be recognised serially and even
if some components are missing or not recognised, the object is
readily classified. A s mentioned earlier, recognition is accomplished
by matching the external and internal models. This is fast if the
internal model component is one which is frequently called upon,
while on the other hand it will be slow if the internal model component
is a n infrequently used one. Further, recognition of component parts
4.10.1
Visual Camouflage
need not necessarily result in the classification of an object. Also, it
is not necessary to recognise all major components to arrive at an
accurate classification.
Some factors crucial for recognition of an object by components
are:
(i) Are there one or more components, the recognition of which
leads to the inference of the object?
(ii) What is the minimum amount of information required to
recognise an object, if all the components have more or less
equal valency or capacity for classifying the object?
(iii) What is the relationship between the complexity of the object
and its recognition?
(iv) What are the factors that can interfere/confound/delay
recognition of the object?
(v) What are the perceptual processes that aid recognition of the
basic geons when minimal information of a n object is
presented?
Distractability is important in the context of camouflage. It may
be defined as the elicitation of orienting responses by irrelevant
stimuli while the individual is engaged in directed or focused attention
to a relevant stimulus or object. In camouflage we have to study
those external visual factors that can effectively induce distractability
which can confound and delay target recognition. These may be
studied through visually evoked potentials (VEPs).
Studies on Target Characteristics and Target
Context on Detection
Basic studies on various target characteristics which have
shown to affect the sensory system have been reported: Target shape
- Carlock, Rayner, and Bucklin3'; size and luminance - Jenkins36;
motion and luminance - Regan, and B e ~ e r l e y size,
~ ~ ; orientation,
motion in depth - Regan38-40;target contrast variation, pattern
degradation, texture, luminance, brightness and colour contrastFenker et aP1.
Applied studies on target characteristics suck a s colour Collins, and W h i t t e n b ~ r gand
~ ~ distance-Pabon, et a143have been
n ~ ~ out field studies
carried out under field conditions. B a l d ~ i carried
using model aircraft to estimate the relationship between aircraft
size and recognition range, varying the overall size, colour and aspect
angle of the models. All these variables were found to affect the
recognition range. Characteristics of target context do also affect
detection. Similarity of target to non-target stimuli - Farmer and
TayloF5,Drury and Clement46;Number of non-targets - Bloomfield,
~~;
level of illumination - Faulkner and
Wald and T h ~ r n p s o nGeneral
4.10.2
85
86
Introduction to Camouflage and Deception
Murphy48,Mass, Jayson and KjeibeF9;Target and non-target size Bloomfieldso,Position - Pollacks1, Brown and Monk52;Clutter and
texture - Bloomfield, Wald and T h ~ m p s o n Distractor
~~;
stimuli Harcum and Shaws3, Wertheims4; Sequential visual patterning Lappin and
Distance - Galanter and GalanteF6;Display size
and fields - Kaplan, Metlay and Lyonss7, Pollacks1; and Colour Bloomfields8.
Banks, et alS9studied the effects of search area size on target
acquisition with passive night vision devices. Hoffman60 studied
detection range, search rate success and rate of acquiring land
vehicles as influenced by different environmental conditions and
characteristics of observing instruments. Warnick, Chastain, and
Ton6' studied long range target recognition and identification of
camouflaged armoured vehicles. Porterfield, et aP2 studied visual
detection of ground target sites and identification of specific targets
as a function of apparent scene illumination.
Basic studies on cognitive aspects of visual processing have
been carried out by John Bloomfield and his colleague^^^. One such
study tried to determine the relationship between the variations in
the properties of disruptors and their effectiveness in concealing
military targets when placed in various classes of natural
backgrounds. Another study carried out was the optimal placement
of military targets in cluttered terrains - Bloomfield, Graf and
Graffunders8. Woodruff, Boyd, and BeckwithZ6indicated a method
for quantifying the detectability of complex targets in natural terrain.
They found that factors like patterns and background orientation of
M 113 vehicles all had highly significant effects on detectability.
Psychological Studies Related to Camouflaging
of Military Objects
Bioelectric activity generated in the brain and recorded from
the scalp of the human beings varies from DC levels to a few kilohertz
(kHz)in frequency and from a fraction of a microvolt to a hundred
microvolts or more in amplitude. It is the DC to 3-5 kHz activity that
is of interest when evoked potential (EP)and event-related potential
(ERP) recordings are conducted. The DC activity or the slow brain
potentials such a s contingent negative variation and Bereitschaft
potential are generally associated with specific events, or more often
with specific psychological states like anticipation, intention or
readiness to act, etc. Evoked potentials are obligatory potentials
that are produced by stimulation of various receptor organs and
represent: basic psychological response of the brain to external
stimulation. Most EPs cannot be seen in routine EEG recording
because of their low amplitude (0.1 to 0.0 1pV) and their admixture
4.10.3.
Visual Camouflage
with normal background brain wave activity and various artifacts.
Removal of background activity is achieved by a process of averaging
of several epochs time-locked to the stimulus6'+.
Dawson demarcated two zones - primary and secondary - in
visually evoked potential (VEP).The primary components consitute
the electro-retinogram and components in the secondary zone
constitute the cerebral visual evoked potential. Variability in latency
of components in the primary zone is minimal while components in
the secondary zone show greater inter-individual variability. The
primary components are least affected by the psychological state of
the individual unlike the cerebral VEPs.
There are four cerebral compenents that occur within 250 msec
as obligatory potentials. These are N,,, P,,,, N,,, and P,,,. P and N
signify positive and negative polarity and underscript relates to
latency at which the peak (component)appears. Areas of the brain
suggested to be invoked in the electrogenesis of cerebral potentials
are area 17 of the striate cortex and parietal lobes. The potentials
may also be influenced by limbic activation and modulated by the
frontal cortex.
As far as visual information processing is concerned, cerebral
VEPs are dependent on the characteristics of the visual stimulating
target/object and the context in which it is embedded. If the target
signature is degraded to such an extent that it matches background,
the corresponding reduction in VEP amplitude and delay in latency
components signify effective camouflaging. If the reverse takes place,
then it can be said to be accelerating detection and identification.
VEPs can also be employed for studying the efficacy of various
disruptive patterns for camouflaging military objects32.
Psychological research related to camouflaging of military
objects against human visual perception may be pursued under
the following lines32:
(i) Visual evoked potentials in relation to psychophysical
attributes of simple and complex stimuli;
(ii)
Standardising reliable indices of ERPs for stimuli which are
found effective for camouflage; and
(iii) Applied studies in camouflage relating to the conditions/
factors that would lead to the delay of target processing or a
reduction in the amount/aspects of information which are
conveyed to the human observer.
87
88
Introduction to Camouflage and Deception
4.11
MISCELLANEOUS CAMOUFLAGE DEVICES
4.11.1
Foams
There are liquid foams being manufactured by FFV
Maintenance Export Division, Arboga, Sweded5.These foams can
be effectively used to conceal vehicle tracks, roads, runways etc.
They can be produced in colours matching with background - green,
sand, snow etc. Besides providing colour matching, foams can also
have texture-matching properties. There are foam generators which
can be mounted on the rear of tanks and other armoured vehicles.
As they generate foam, they spread the foam such that the vehicle
tracks can be concealed. Besides providing concealment in the visible
region, they can cater for thermal infrared region also. Depending
upon the stability of the foam, which can be up to 48 hours, it
automatically disappears subsequently.
Foam generators which can generate foam on large scale are
available which can be carried by standard vehicles. The subject of
"foam" is discussed in the chapter on Camouflage Materials.
4.11.2
Reflectance Camouflage.
Employment of vertical screens has been already discussed.
Such screens, although hiding the object, can themselves be quite
often seen. If the screen is also made to blend with the background,
neither the object behind the screen, nor the screen can be seen. A
screen which has mirror-like properties would serve the purpose.
Screens consisting of reflecting mylar can be used. As and when
required, such a reflecting sheet is kept in front of the object so that
the object is hidden. In a foliated background, consisting of bushes,
the mirror forms an image of the vegetation in front of it, rendering
the mirror invisible. From a distance neither can we see the object
nor the reflecting surface. Figures 4.2 1(a)and 4.2 1(b) show a model
of a truck and the model together with reflecting surface. In the
second figure we can see neither the model nor the reflecting surface.
Such a technique can be used in a foliated background only.
Another disadvantage is that it is difficult to camouflage big objects
a s large reflecting surfaces are difficult to get. Ordinary mirrors
cannot be used. Only reflecting sheets which can be rolled can be
used.
4 . 1 1 . 3 Antishine Devices
A vehicle such as a jeep or a 3-Tonner which is otherwise very
well-camouflaged can be seen from kilometers away from air or
ground by the shine produced by the windscreen. There is a need
to supress the dazzle effect produced by windscreens. When the
vehicle is parked, the windscreen can be physically hidden but when
Visual Camouflage
Figare 4.21(a). Model of a truck in a foliated background.
Figure 4.211b). The same truck camouflaged by reflecting surf8ce.
89
90
Introduction to Camouflage and Deception
it is in motion this is not possible as it would obstruct the vision of
the driver.
There are anti-reflecting materials, which, when applied to the
windscreen, reduce the shine by destructive interference. Such nonreflecting films cannot work for all wavelengths in the visible region.
Also, when the vipers are used the film may come out; further, due
to environmental factors such a s heat, wind, and humidity, the film
may gradually lose its properties. There are anti-reflecting gadgets
developed by Defence Laboratory, Jodhpur which when fitted in front
of the windscreen can cut off the shine without causing hindrance
to the vision of the driver. As yet, however, there does not appear to
exist any completely satisfactory method by which the dazzle
produced by windscreens is eliminated.
4.11.4 Vehicle Track Erasers
The tracks produced by vehicles such a s tanks, trucks and
jeeps may be pronounced, depending upon the soil conditions of
the ground. From the vehicle tracks, military activity can be inferred
in any area. As such there is a need to erase or obliterate vehicle
tracks such that they are not seen or photographed by aerial
reconnaissance. Mechanical devices fitted to the rear wheels have
been successfuly developed at Defence Laboratory, Jodhpur to
obliterate vehicles tracks.
Besides track erasers, vehicle track generators are also needed,
in order to simulate dummy qctivity in an area where dummies are
deployed.
Automatic blending of objects with background.
One disadvantage with pattern painting is that whenever an
object such a s a vehicle moves from one background such as
woodland to another background, such as desert, the pattern
needs change. So the requirement is that as the vehicle moves
from one background to another, the colours used in the painting
should automatically change and match with the background.
There are some organic compounds known as liquid crystals.
Cholesteric liquid crystals exhibit selective scattering of light. The
wavelength which undergoes maximum scattering depends upon
several factors such as temperature, electric field etc. Some work
appears to have been carried out to explore the potentialities of
these materials for automatic blending of objects with background.
Actual applications are not found in literature.
Visual Camouflage
4.12
COMPUTER-BASED EVALUATION OF
CAMOUFLAGE
Kilian and HepfingeF6 reported the construction of a fieldportable, computer-based system for evaluation of personal
camouflage. It is based on image analysis technique. The system
can be utilised to evaluate the efficacy of camouflage uniforms
against unaided human vision. The system which is known a s the
Mobile Army Camouflage Evaluation (MACE)consists of hardware
and software for acquiring, reducing and analysing images of
camouflage-in-background scenes. T h e method involves
transformation from a set of monochromatic images to standard
colour description coordinates and subsequent comparison of the
first and second order statistical measures for the camouflaged
soldier and the local background.
The MACE system generates a set of 10 monochromatic images
of the object samples at equal intervals across the electromagnetic
spectrum from 380 - 740 nm. The set of 10 monochromatic images
is then transformed to standard colour description coordinates (CIE).
Evaluation of camouflage is based on a set of features for each
component in the CIELAB colour space which includes statistical
texture measures and first-order descriptive statistics over specified
regions in the scene a s functions of orientations and scale. The
authors state that the MACE system represents a first step towards
a fully objective technique for camouflage evaluation and further
work is to be done to increase the fidelity to the response
characteristics of the human visual system including colour
representation, pre-attentive visual processing as well as attentive
processing for recognition.
4.13
NEW AREAS OF VISUAL CAMOUFLAGE
Metamers
One of the important ways by which objects are detected/
recognised/identified by human vision is by differences in colour
and electronically by spectral radiometric differences. In order to
defy detection by both human vision and electronically, the object
surface should give rise to different spectra (radiometric) leading to
different grey level values and spectral band values having the same
colours. This can be accomplished by employing metamers which
evoke identical colour sensations but with different radiometric
functions. Every colour stimulus (radiometric function) comprises
two parts -- a fundamental and a residual (fundamental colour
~ is
- ~the
* . fundamental alone which
stimulus and metameric b l a ~ k ) ~ It
is processed by the visual system and evokes colour sensation. The
residual is not processed and is without effect on colour sensation.
4.13.1
91
92
Introduction to CamoujZage and Deception
Metamers have the same fundamentals but different residuals. It
would be necessary to generate various metamers for painting
identical type of objects for camouflage purposes. This new technique
gives different radiometric functions for each identical object under
camouflage.
4.13.2 Spectral Camouflage
Spectral camouflage is the camouflage which blends the
spectral characteristics of the object surface with the background,
a t the same time causing disruption of the object to reduce chances
of its recognition and identification. This is possible if each pixel of
the object a s recorded by a spectral scanner
has the same spectrum as that of the background in which the
object is situated (F'uspak).
The area to be covered by each paint for spectral matching can
be calculated from
Where
RA1,R,2, R;
A,, A, and A,
IZ1
I1
'
=
overall reflectances in bands 1,2 & 3
=
areas painted by paints 1,2 & 3
RZAl, R~~ etc are reflectances of the paint No-1 in bands
1
Using least square method, more exact values can be found
with increased number of bands and paints.
REFERENCES
1.
Som, S.C. Light and its measurement. Proceedings of the
Seminar on Camouflage, Oct 19-21, 1989, Defence Laboratory,
Jodhpur, India. p. 45-85.
2.
Rodgers, A.L., et al. Surveillance and target acquisition
systems. Brasseys Defence Publishers - a member of the
Pergamon Group, Oxford. 1983. 17-27.
3.
Raisbeck, et al. Design goals for future camouflage systems.
Report to US Army Mobility Equipment Research and
Visual Camouflage
Development Command. Jan 1981. Contract No. DAAK-79D-0036, Order No. 0006 P 11-20.
Duntley, S.Q. Reduction of apparent contrast by atmosphere.
JOpt. Soc. Am. 1948, 38, 179.
Duntley, S.Q. Visibility of distant objects. J. Opt. Soc. Am. 1948,
38, 237.
Blackwell, H.R. Contrast thresholds of the human eye. J. Opt.
Sac. Am. 1945,36,624.
Middleton, W.E.K. Vision through atmosphere. University of
Toronto Press, 1968.
Guide to camouflage for DARCOM equipment developers.
Report prepared for MERADCOM under contract DAAG5376-c-0 126, Brunswick Corporation.
Harvey, L.O. & Geravais, M.J.International representation of
visual texture as the basis for the judgement of similarity. J.
of Exptl. Psych.: Human Perception and Performance, 1981,
7(4),
Military reconnaissance methods and devices - Barracuda
Camouflage. Prepared and Printed by A.B. Teleplan on behalf
of DIAB-Barracuda, Solna, Sweden 1982, p. 1-62.
Remote sensing in relation to camouflage. Status Report.
Defence Laboratory, Jodhpur, 1988.
Cott, H.B. Adaptive coloration in animals. Methuen & Co. Ltd.,
London, 1966.
Saxena, S.K. & Solanki, K.R. Development of vegetation in
Thar Desert. Proceedings of the Seminar on Camouflage, Oct
19-21, 1989, Defence Laboratory, Jodhpur, India. pp. 19521 1.
Hook, D.W & Sutherland, R.A. Obscuration countermeasures;
chapter 6, Pollock, D.H(Ed). Countermeasure systems.
Infrared and Electro-optical Systems Handbook. Vol7., ERIM,
and SPIE Optical Engineering Press, Michigan, USA, 1993.
Walters, B. Camouflage and chemical warfare protection. Asian
Defence Journal, 1993, 1.
Knorpp, F.R.Camouflage and deception -A challenge to army.
Armament Militay Technology. 1987, XI(9), 88-90
Parker, G.H. Chromatophores. Biol. Rev, Cambridge, 1930, V,
59-90.
93
94
Introduction to Camouflage and Deception
Humphreys, A.H. & Jarvis, S.V. Camouflage pattern painting.
Report of USAMERDCs, Camouflage Support team to
MASSTER, Fort Belvoir, VA, USAMERDC, February, 1974.
Rep. No. 2090.
Marr, D. Vision: A computational investigation into the human
representation and processing of visual information. San
Francisco: W.H. Freeman, 1982.
Bucklin, B.L. History and status of small item camouflage.
Picatinny Arsenal, Dover, NJ, US Army, April, 1973. Rep. No.
SR1-3-490 1.
Jarvis, S.V. Technical memorandum: Fort Knox test of
camouflage pattern effectiveness. Fort Belvoir, VA,
USAMERDC, August, 1974.
Grossman, J.D. Effect of camouflage on visual detection. NWCTP-5745. China Lake, California: Naval Weapons Centre, April,
1975. NTIS NO. AD-BOO4 97118.
OWeill, T.R. & Johnsmeyer, W.F. Dual tex: Evaluation of dual
texture gradient pattern. West Point NY: Military Academy,
Office of Military Leadership, April, 1977. NTIS No. AD-A040
34218.
Braaten, J . Dual textured camouflage evaluated. Armor. 1980,
Jul-Au~,15- 17.
07Neill,T.R. ; Brusitus, J.M.; Taylor, D.L. & Johnsmeyer, W.F.
Evaluation of dual texture gradient camouflage pattern. West
Point, NY: Military Academy, 1978, July. NTIS No. AD A056
47 116.
Woodruff, C.J.; Boyd, R.J. & Beckwith. Comparative
assessment of the detectability of patterned M 113 vehicles in
natural terrain backgrounds. Ascot Vale, Australia: Materials
Research Labs, Dec 1986. Report No. MRL-R- 1035. NTIS No.
AD-A18 1 639/6/XAB/XPS.
Skinner, D.R. A pseudo-random pattern generator for
camouflage. Department of Defence, Australian Defence
Scientific Service Materials Research Laboratories,
Maribyrnang Victoria, Australia. 1975. Research Report 599.
Jayson, P.P. & Puspak, S.N. Report on computer simulation
of disruptive patterns on simple, regular, geometrical solids.
Defence Laboratory, Jodhpur, 1988.
Synthetic Camouflage Nets. Barracuda camouflage.
Barracuda, France.
Visual Camouflage
Barracuda - Camouflage Nets Practical Handbook.
Foss, C.F. & Gander, T.J.(Ed]. Jane's Military Vehicles and
Logistics. 1994-95, 15, p. 677-84 .
George, C.S.; Mudgil, Y.K.; Ramana Rao, J.V. & Sarma, T.V.R.
Status report on psychological studies in camouflage. Defence
Laboratory, Jodhpur, April, 1993.
Sokolov, E.N. Perception and conditioned reflex. Pergamon
Press, Oxford, 1963.
Garner, W.R. Uncertainity and structure a s psychological
concepts. Wiley, New York, 1962.
Carlock, J.; Rayner, J.C. & Bucklin,B.L. Visual detection and
recognition threshold study of four geometric shapes. Rep.
No. PA-TN-1956. N J Dover: Picatinny Arsenal, December,
1970. NTIS No. AD 717 004.
S.E. Jenkins. Size and luminance discrimination in peripheral
visual field. Ascot Vale, Australia: Materials Research Labs,
Oct 1979. Rep. No. MRL-R-760. NTIS No. AD-A081 83913.
Regan, D. & Beverley, K.I.Figure-ground segregation by motion
contrast and by luminance contrast. J. Opt. Soc. Am. 1984,
A2(1), p. 433-41.
Regan, D. Visual sensitivities and discriminations and their
roles in aviation. Halifax, Nova Scotia: Dalhousie Univ., June,
1985. AFOSR-TR-85-0639. NTIS NO. AD A158 962.
Regan, D. Visual sensitivities and discriminations and their
roles in aviation. Halifax, Nova Scotia: Dalhousie Univ., March
1986. AFOSR-TR-84-003. NTIS NO. AD A170 418/8/XAB/
XPS.
Regan, D. Visual sensitivities and discriminations and their
roles in aviation. Halifax, Nova Scotia: Dalhousie Univ.,
September, 1987. AFOSR-TR-88-0907. NTIS No. AD A198
470/7/XAB/XPS.
Fenker, R.M.; Dansereau, D.F.; Evans, S.H. & Ellis, A.M.
Annotated bibliography of recent reports on the psychological
variables affecting performance with camouflaged objects. Fort
Worth TX: Texas Christian Univ. Inst. for Study of Cognitive
Systems. August, 1975. DAAD05-73-C-0554. NTIS No. ADA017 067.
Collins B.L. & Whittenburg, J.A. Defective color vision filters,
films, and the detection of camouflaged targets: Annotated
bibliography. March, 1974. NTIS No. AD-778 196.
95
96
Introduction to Camouflage and Deception
Pabon, R.J.; Davison, R.A. & Parks, W.I. Analysis of phase IIA
of FE 43.8. Fort Leaven Worth, Kans: Army Combined Arms
Combat Developments Activity, Feb 1976. Rep. No. CACDATR-2-76. NTIS NO. AD-A025 82316.
Baldwin, R.D. Relationship between recognition range and the
size, aspect angle, and color of aircraft. Alexandria, VA: Human
Resources Research Organisation, February, 1973. Hum RRO
Techn. Rep.
Farmer, E.W. & Taylor, R.M. Visual search through color
displays: Effects of target background similarity and
background uniformity. Perception and Psychophysics, 1980,
27(3),p. 267-272.
Drury, C.G. & Clement, M.R. The effect of area, density and
number of background characters on visual search. Human
Factors, 1978, 20(5), p. 597-602.
Bloomfield, J.R.; Wald, J . & Thompson, L.A. Visual search:
clutter and proximity effects. Minneapolis, MN: Honeywell Inc.,
1979. NTIS NO. AD-A1 15 79919. DAAK 70-79-C-0032.
Faulkner T.W. & Murphy, T.J. Lighting for difficult visual
tasks. Human Factors, 1973, 15(2), 149-62.
Mass, J.B.; Jayson, J.K. & Kjeiber, D.A. Effects of spectral
differences in illumination on fatigue. Journal of Applied
Psychobgy, 1974,59(4), 524-26.
Bloomfield, J.R. Visual search in complex fields: Size differences
between target disc and surrounding discs. Human Factors,
1972, 14(2), 139-48 .
Pollack, I. Detection of changes in spatial position: IV multiple
display fields, display aiding and interference. Human Factors,
1974, 16(2), 93- 116.
Brown, B. & Monk, T.H. The effect of local target surround
and whole background constraint and visual search times.
Human factors, 1975, 17(1),81-88.
Harcum, E.R. & Shaw, M.R. Cognitive and sensory lateral
maskings of tachistoscopic patterns. Journal of Experimental
Psychology, 1974, 103(4),663-67.
Wertheim, A.H. Distraction in visual search. Soesterberg,
Netherlands: Institute for Perception RVQ-TNO, June, 1981.
Rep. No. IZF- 1981-7, TBCK-75522. NTIS No. N82-2483013.
Lappin, J.S. & Bell, H.H. Perceptual differentiation of sequential
visual patterns. Perception & Psychophysics. 1972,12(2-4),
129-34.
Visual Camouflage
Galanter, E. & Galanter, P. Range estimates of distant visual
stimuli. Perception & Psychophysics, 1973, 14(2),301-06.
Kaplan, I.T.; Metlay, W. & Lyons, C.T. Display size and
distribution of search times. Journal of Experimental
Psychology, 1972,95(2),334-36.
Bloomfield, J.R.; Graf, C.P. & Graffunder, K. Visual factors in
target disruption. DAAK 02-75-C-0055, Minneapolis, MN:
Honeywell Inc., Dec, 1975. NTIS No. AD-A035 174/2.
Banks, J.H., et al. Effects of search area size on target
acquisition with passive night vision devices. Arlington, VA:
US Army Behaviour and Systems Research Lab, February,
1971, BSRL Techn. Rep. 1168.
Hoffman, H.E. The maximum detection range and discovery
of land vehicles. Farnborough, England: Royal Aircraft,
January, 1970. NTIS No. AD878 422. Rep. No. RAE-Library
Trans. 1484.
Warnick, W.L.;Chastain, G.D. & Ton, W.H. Long range target
recognition and identification of camouflaged armored
vehicles. Alexandria, VA: Human Resources Research
Organisation, May, 1979. NTIS No. AD A077 86211. Hum
RRO Tech Rep 78-7.
Porteriield, J.L., et aL Airborne visual reconnaissance as a
function of illumination level. Wright Patterson AFB, OH:
Aerospace Medical Research Laboratory, 1971. NTIS No. AD728 629. Rep. No. AMRL-TR-71-9.
Bloomfield, J.R.; Wald J . & Smith D.A. Final report on the
optimal placement of military targets in cluttered terrains.
Minneapolis, MN: Honeywell Inc., July 1979. NTIS No. ADA083 500/9. DMK 70-77-C-0056.
Halgren, E. Evoked potentials. Boulton, A.A.; Baker, G.B. &
Vander, C. Woref-Neuromethods. Vol. 15: Neurophysiological
Technics- Applications to Neural Systems, Clifton, N.J, 1990,
p. 147-275
FFV Foam Camouflage. Jane's Year Book, Sweden, 1986,
p. 897.
Kilian, J.C. & Hepfinger, L. Computer-based evaluation of
camouflage. SPIE, 1992, 358, 1687.
Jozef, C. & Cohen, J. Colour and colour mixture: scalar and
vector fundamentals. J. Colour Research and Applications,
1988, 13(1).
97
98
Introduction to Camouflageand Deception
68.
Worthy, A.J. Calculation of metameric reflections. J. Colour
Research and Applications, 1988, 13(2).
69.
Michael, H.B.& Gerhard, W. Chromatic adaption and colour
constancy: A possible dichotomy. 3. Colour Research and
Applications, 1986, 1l(3).
70. Berms, R.S.;Billmeyer Jr,; Fred, W. & Sacher, R.S. Methods
for generating spectral reflectance functions leading to colour
constant properties. J. Colour Research and Applications, 1985,
lO(2).
INFRARED CAMOUFLAGE
5.1
INTRODUCTION
Prior to World War 11, infrared camouflage did not seem to
have been employed. But as mentioned by Cott in his book 'Adaptive
Coloration in Animals'' and also referred to in Chapter 3, in nature,
there are examples, s u c h as certain green caterpillars like
Smerinthus ocellatus and certain tree frogs such as Hyla Coerulea,
which have in-built mechanisms in them by which they escape
detection in the visible region as well a s in the infrared region.
That is, these small animals blend with their green background
when observed by the normal eye which is sensitive to the visible
region, and also blend with the background even if they had been
observed by an infrared-sensitive eye.
Initially, by the term "camouflage in war" was meant the means
employed to defy detection of military objects by sensors available
in the visible region of the electromagnetic spectrum, principally,
the human eye - unaided and aided. But with the development of
infrared false colour film, also known as camouflage detection film,
during World War 11, the need for camouflaging military objects
beyond the red end of the visible region arose. The infrared false
colour film, which is sensitive u p to 0.9 pm,can detect military
objects covered with cut foliage in a foliated background. The advent
of infrared false colour film provided impetus for research and
development in the field of infrared radiation. Since then, the field
has steadily grown, with the main thrust on its application to
military reconnaissance, surveillance and target acquisition. This,
in turn, has put great stress on infrared counter-measures to reduce
detection probability of military targets.
It may be said that any development in the field of infrared
engineering and technology is synonymous with the development
of military infrared. Subsequently these developments have found
application in industry, medicine and science. Open literature in
the field has been limited because of its application in defence.
100
Introduction to Camouflage& Deception
The field of infrared camouflage-known under different names:
infrared counter-measures, infrared signature suppression, etchas become vital to the success of any military operations in the
various theatres of war.
5.2
WHAT IS INFRARED CAMOUFLAGE?
The term infrared camouflage denotes any device or equipment
or technique employed to counter detection by an infrared system.
Advances in infrared sensor technology have put great stress on
infrared camouflage and demanded counter-measures.
5.3
INFRARED RADIATION
Infrared radiation was discovered by Sir William Herschel in
the year 1800. While observing the solar spectrum, Herschel noticed
that radiation a t and beyond the red end of the visible spectrum
produced heat. The radiation responsible for causing this effect is
the infrared radiation. Broadly, infrared radiation is that portion of
the electromagnetic spectrum lying between the visible region and
the microwave region. The unit of wavelength in the infrared
spectrum is conveniently chosen a s the micrometer (pm)or micron
(p) which is
rn. The frequencies of this region of the
electromagnetic spectrum are of the order of 1013to loi4Hz.
The wavelength limits may be put a s 0.75 pm to 1000 pm
which may be further subdivided2 into near infrared (NIR) 0.753pm, middle infrared (MIR)-3-6pm,far-infrared (FIR)-6-15pm and
extreme-infrared (XIR) 15-1000pm.
There are other c;lassificationsfound in literature3.In one such
classification, 0.7-3 pm region is referred to a s shortwavelength
infrared (SWIR), 3-6 pm region a s middle wavelength infrared
(MWIR), 6-16 pm region a s longwavelength infrared (LWIR), and
16-1000 pm region a s far infrared (FIR). However, the universally
accepted designations (1986)are: SWIR upto 3 ym, MWIR-3-6 pm,
LWIR-6-16 pm and FIR beyond 16 pm. The upper limit of the
infrared spectrum - (1000 pm) overlaps the microwave region4. 814 pm is also referred to as therrnal infrared.
5.4
SOURCES OF INFRARED RADIATION
Sources of infrared radiation may be broadly divided into two
classes - natural and man-made.
5.4.1
Natural Sources
All bodies above absolute zero of temperature emit infrared
radiation. The laws governing the radiation will be discussed later.
The wavelength characteristics of some of the natural sources are
given in Table 5.1. Since all heated bodies are sources of infrared
Infrared Camouflage
radiation, infrared radiation is also referred to as heat or thermal
radiation.
Table 5.1. Natural sources of infrared radiation and their
radiation characteristics
-
Source
Temperature
K
- --
--
Wavelength
Pm
Earth
Human body
Cosmos
- - -
---
The s u n is a powerful source of infrared radiation whose
characteristics will be discussed later. Other natural sources are
s b , clouds, snow etc.
5.4.2
Man-made Sources
Man-made sources may be divided into two groups - laboratory
sources and other objects such as military targets.
There are several laboratory sources of infrared radiation5-lo.
They include tungsten lamp, xenon arc lamp, laser, the Nernst
glower, the globar, etc. Before we discuss these we shall introduce
the concept of a black body. A black body is a theoretical concept
and such a source is not possible to make in practice. A real black
body approximates an ideal black body in its radiation emitting
characteristics. Such sources are of cavity type having a narrow
opening of 1.25 cm or less. They operate in the range of temperature
125°C - 1025°C.
5.4.2.1
Carbon arc
The carbon arc can operate at a temperature as high a s 6000
K and has wavelength range 2 - 10 pm. This source can be used a s
solar simulator.
5.4.2.2
Tungsten lamp
This can operate upto temperature a s high a s 3300 K. It
provides high intensity infrared in the wavelength range 2 - 3 ym.
5.4.2.3 Xenon arc tamp
It is a good source of infrared radiation in the wavelength
around 1.5 pm.
5.4.2.4
Laser
Laser a s a source of infrared radiation is of comparatively
recent origin. Its special a t t r i b u t e s a r e high intensity,
monochromaticity and coherence, which find special applications.
101
102
Introduction to Camouflage & Deception
5.4.2.5
The N e m t glower
A typical Nernst glower consists of a cylinder 3 cm long and
0.15 cm diameter made by sintering a mixture of zirconium, yttrium,
thorium and a few other oxides. At an operating temperature of
2000 K, it emits infrared radiation in the range
2-15 pm. This source is used in infrared spectrometers for
measurement of infrared reflectance, absorptance and transmission
of materials.
5.5.2.6
The globar
It consists of a cylinder 5-10 cm long and 0.5 cm diameter,
made up of silicon carbide2.At an operating temperature of 1500 K
it emits infrared radiation in the wavelength range 2-15 pm.
~ h e s eman-made sources are used in the laboratory for
calibration of radiometers and also as sources of infrared radiation
in spectrophotometers and as target simulators.
The infrared radiation emission characteristics of military
targets will be discussed under a separate section-Infrared
signatures of military targets.
5.5
TERMINOLOGY
Radiometry deals with measurement of radiant energy, which
may be from any part of the electromagneticspectrum ranging from
X-rays, through ultraviolet, visible, infrared to microwaves. A
radiometer, while measuring radiant energy, absorbs and converts
it into some other form like electrical, thermal or chemical, as there
is no method for direct measurement of radiant energy.
As applied to infrared radiation, the various quantities of
relevance, the symbols to denote these quantities, d the units in
which they are expressed are the starting point for iscussing the
properties and measurement of the radiation. The te inology and
symbols of radiometry employed have variations a n d v s o undergo
changes. Those that are given here are based on the rep.o,rt of the
Committee on Colorimetry of the Optical Society of America which
were also used by Hudson2.
5.6.1
Radiant Energy (U)
It denotes the energy carried by electromagnetic waves. This
can be the energy radiated by a source or received by a detector in
a given time interval. It is denoted by the symbol U and its unit is
joule.
5.5.2
Radiant Flux or Radiant Power (P)
It is the rate at which radiant energy is radiated by a source
or received by a detector. It is denoted by the symbol P and its unit
1
Infrared Camouflage
is watt. Radiant flux is a useful quantity which enters into many
calculations.
A s applied to a source, the terms - radiant emittance, radiant
intensity and radiance are used. These are usually measured a t a
specific distance from the source.
5.5.3
Radiant Emittance (W)
It is the radiant flux ermtted per unit area of a source. It is
denoted by the symbol W and its unit is watt/cm2 or watt/m2.
5.5.4
Radiant Intensity (J)
It is the radiant flux emitted per unit solid angle. It is denoted
by the symbol J and its unit is watt/steradian.
In this context, it would be better to distinguish between point
sources and extended sources. These are relative terms. In practice
it is not possible to have point sources. A source extending over a
short distance may be treated a s a point source at a long distance.
For example, an extended source such as the tailpipe of a jet aircraft
at a distance of 15 km may be treated as a point source. The term
radiant intensity refers to a point source. In the case of an extended
source, such as sky, it is difficult to define solid angle subtended
by a detector a t the source. In the case of extended sources the
term radiance (N) is employed.
5.5.5
Radiance (N)
It is the radiant flux emitted per unit solid angle and per unit
area of the source (extended source), i.e., the radiant intensity per
unit area of the source. It is denoted by the symbol N. Its unit is
watt/cm2steradian or watt/m2 steradian. In order to measure this
quantity, the radiant flux is to be divided by the area of the source
and the angle subtended a t the source by the detector.
5.5.6
Radiant Photon Emittance (Q)
The response of some types of detectors depends on the
number of photons rather than on the radiant flux. In such
situations the quantity - the radiant photon emittance (Q) - is of
significance. It is the number of photons emitted per second per
unit area of the source.
5.5.7
Irradiance (H)
This quantity refers to the radiant flux received by a surface.
It is the radiant flux striking unit area of a surface. It is denoted by
the symbol H and its unit is W ~ mor-W~m-2.
The irradiance a t a distance d from a point source of radiant
intensity J, neglecting the effects of the intervening medium, is
H = J/d2
103
104
Introduction to Camouflage & Deception
5.5.8
Spectral Radiant Flux (P,)
It represents qualitatively the radiant flux emitted in a narrow
band of wavelengths. It is the radiant flux per unit wavelength
interval evaluated at a particular wavelength and is the limiting
value of the expression
In order to evaluate the radiant flux P emitted between the
wavelengths k,,and &, the following integration is to be carried out:
A2
P = IpAdA
5-2
A1
If the integration is carried out between the limits zero to
infinity, the value of P represents the total radiant flux. If integration
is carried out over an interval of wavelengths, the value of P
represents the effective radiant flux. The latter quantity is useful
in the case of detectors whose response is limited to a wavelength
interval.
5.5.9
Radiant Emissivity (e)
It is the ratio of the radiant emittance of a source to that of a
black body at the same temperature. It is denoted by the symbol E.
It is a numeric varying between the limits zero and unity.
This quantity is of great importance in infrared
countermeasures and will be dealt with in detail subsequently.
5.5.10
Radiant Reflectance (p)
It is the ratio of the reflected radiant flux to the incident radiant
flux,and is denoted by the symbol p. It is a numeric varying between
the limits zero and unity.
5.5.11
Radiant Absorptance (a)
It is the ratio of the absorbed radiant flux to the incident radiant
flux,and is denoted by the symbol a.It is a numeric varying between
the limits zero and unity.
5.5.12
Radiant Transmittance (T)
It is the ratio of the transmitted radiant flux to the incident
radiant flux, and is denoted by the symbol T. It is a numeric varying
between the limits zero and unity.
LAWS GOVERNING RADIATION EMITTED BY
HEATED OBJECTS
In infrared countermeasures, we should first of all know
the infrared signatures of the military objects concerned. These
5.6
Infrared Camouflage
in turn depend upon the infrared radiation emitted by the objects.
For understanding the radiation characteristics, a knowledge of
the laws governing the radiation emitted by heated objects is
essential.
All matter continuously emits and absorbs electromagnetic
radiation. The emission is a consequence of continual motion of
elementary charged particles within the substance. One of the
fundamental laws of classical electromagnetic theory is that an
accelerated charged particle radiates energy. As the temperature
of a body is raised, the thermal motion of the charged particles of
matter - electrons and protons - increases, which results in the
emission of radiation.
The basic laws which govern the emission and absorption of
law, (ii) Stefan-Boltzmann
radiation by matter are (i) Kirchhoffs'
law, (iii)Wien's Displacement law, (iv)Rayleigh-Jeans law, and (v)
Planck's law".
5.6.1
Kirchhoffs Law
Kirchhoft's law states that good absorbers of radiation are good
emitters of radiation. Consequently, a black body, which is a good
absorber of radiation, is also a good emitter of radiation. It has
maximum absorptance (a = 1) and hence it emits maximum
radiation. Because of this reason, a black body is used to compare
the radiation emitted and absorbed by all other bodies.
5.6.2
Stefan-Boltzmann Law
This law states that the total amount of radiation emitted by a
black body is proportional to the fourth power of its absolute
temperature.
W, = aAT4t
where
T
o
5-3
absolute temperature of the body in K
5 . 6 7 ~ W/m2 K4
(Stefan's Constant)
A
=
Surface area of the black body in m2
t
=
time in seconds
W,, = Total amount of radiation emitted by
the black body
For non-black bodies
where A e
=
=
=
the emissivity of the surface of the body
(defined in section 5.7.3)
105
106
Introduction to Camouflage & Deception
5.6.3
Wien's Displacement Law
This law gives the wavelength at which the radiant emittance
from a black body at a given' temperature is maximum
Assuming that the sun is a black body with a surface
temperature of 6000 K,h, turns out to be 480 nm. Wien's law fits
the experimental data only at short wavelengths and low
temperatures.
5.6.4
Rayleigh - Jeans"Law
This law satisfactorily fits the experimental data at long
wavelengths and at high temperatures. But, according to the
expression, the energy is found to increase without limit with
decrease of wavelength.
5.6.5
Planck's Law
This law fits the experimentally observed data of radiation
emitted by a black body at short as well as long wavelengths. The
law can be stated as2
where
w, -
the spectral radiant emittance in W ~ mpm-I
- ~
the wavelength in micrometers
Planck's constant
(6.6256 f 0.0005) x
W sec2
- absolute temperature in K
- velocity of light
(2.997925 0.000003) x 101° cm sec"
- 2.rchcz (first radiation constant)
= (3.7415 0.0003) x lo4W ~ mpm4
- ~
- ch/ k (second radiation constant)
(1.43879 0.00019) x lo4 pm K
- Boltzmann's constant
= (1.38054 0.00018) x loz3W sec K-I
Figure 5.1 gives the variation of spectral radiant emittance of
a black body at various temperatures in the range 500-900 K.
h
h
-
*
*
*
*
Infrared Camouflage
Wavelength (microns)
Figute 5.1.
Vatiation of spectral radiant emittance of a black body
at various temperatures in the range 500-900 K.
Source:
Reprinted by permission of John Wiley and Sons Inc. from Infrared System
Engineering by Richard D Hudson, Jr. Copyright O 1969 by John Wiley 81
Sons Inc.
107
108
Introduction to Camouflage & Deception
By integrating Planck's expression between the wavelength
limits zero to infinity, we can arrive a t Stefan-Boltzmann law
where
W
radiant emittance (W ~ m - ~ )
Stefah - Boltzmann constant
We can arrive at Wien's displacement law by differentiating
Planck's law and solving for the wavelength a t which the radiant
ernittance is maximum
h, T = constant
5-9
where
h, = wavelength a t which the spectral radiant emittance is
maximum. The value of the constant comes out to be 2897.8 0.4
CL~K
A s the temperature increases, the wavelength a t which
maximum spectral radiant emittance occurs decreases.
5.7
PROPERTIES OF INFRARED RADIATION
5.7.1
Propagation Characteristics
Infrared radiation travels with the speed of light, like any other
type of electromagnetic radiation, and, in its transit from the source
undergoes reflection, scattering, absorption, transmission,
diffraction and polarization.
In most of the cases, the intervening medium between the
source and the detector is the atmosphere. As the radiation passes
through the atmosphere, it gets attenuated by its interaction with
the various constituents of the atmosphere. This process is known
a s extinction.
5.7.2
Extinction Coefficient
If x is the path length and a the extinction coefficient, then
the transmittance z of the path through the atmosphere can be
expressed as2
2 = e-ax
5- 10
Two factors contribute to extinction. We can write
o=a+y
5-11
where
a is absorption coefficient which takes into account the entire
absorption by various gaseous molecules of the atmosphere;
y is scattering coefficient which takes into account the entire
scattering by various constituents of the atmosphere (including
haze, fog, etc)
90th a and y vary widely with the wavelength of the radiation.
0
=
=
*
Infrared Camouflage
5.7.3
Atmospheric Windows
Figure 5.2 shows the variation of transmittance of the
atmosphere, in percent, with wavelength2. From the curve we can
see several regions of high transmittance. These are known a s the
atmospheric windows. The two most important windows are in the
regions 3-5 pm and 8-14 pm. These two windows are exploited by
various infrared sensing systems employed in reconnaissance,
tracking, searching and target acquisition. These windows restrict
the choice of materials for detectors a n d associated optical
components.
Of the various constituents12 water vapour is the most
important absorbing gas interfering with the transmission of the
infrared radiation. When the atmosphere is dry (3.5 g/m3), it is
almost completely transparent in the windows. When the
atmosphere is wet (19 g/m3) it totally blocks the atmospheric
windows. Water vapour absorption occurs in two forms - molecular
band absorption and continuum absorption. Very complex spectra
characterise molecular absorption. Hundreds of vibration-rotation
energy level transitions create the water vapour absorption bands.
Local humidity conditions can greatly affect the content of water
vapour.
Next to water vapour, C02is the important constituent of the
atmosphere responsible for infrared absorption. It has a constant
weight ratio in standard atmosphere. Local effects, such a s
automobile exhaust, dense foliage, and factory exhausts, can alter
the standard distribution. Carbon dioxide affects both the
atmospheric windows 3-5 pm and 8-14 pm. Nitrous oxide has a
fairly constant concentration in the atmosphere. It exhibits strong
absorption a t about 4.5 pm and 8 pm. Otherwise its absorption is
insignificant. Methane has atmospheric absorption centered around
3-5 vm and 8 ym. Ozone exhibits strong absorption a t 9.6 pm.
Carbon monoxide exhibits absorption in a band between 3.6 ym
and 3.8 pm. Nitrogen affects the atmospheric window 3-5 pm.
Oxygen does not have any significant absorption in the atmospheric
windows.
Table 5.2 shows the concentrations of the principal absorbing
gases in the earth's atmosphere. The compositions are percent by
volume.
Table 5.2. Composition of the atmosphere
-
Constituent
Percent
b y volume
Constituent
Percent
b y volume
Nitrogen
78.088
Kypton
1.14x104
oxygen
Areon
20.949
0.93
Nitrous oxide
Carbon monoxide
5x 10-~
20 x l o 4
109
1 10
Introduction to Camouflage & Deception
Constitue~t
Carbon dioxide
Neon
Helium
Methane
Source:
Percent
by volume
0.033
1.8 x 10"
5.24 x l o *
1.4 x 10.'
Constituent
Xenon
Hydrogen
Ozone
Water vapour
Percent
by volume
8.6 x l a 6
5 x 10"
Variable
Variable
NRL report 8311. Atmospheric Effects on Infrared Systems by Goodeil J. B. and
Roberts R.E.
The atmosphere, besides the above constituents, contains
suspended particles such a s dust, carbon particles, sand, ashes,
water droplets, salt s p r a y a n d t h e like whose sizes a n d
concentrations depend on local environment, and can therefore
vary not only with locale, but temporariIy within a locale. The main
contributors to aerosols are sea spray, fog, haze, dust storms and
air pollution. Other contributors include forest fires, sea salt, rocks,
soil, volcanoes, meteoric dust and biological materials.
LOWTRAN - 3B Computer Programme12 developed by the Air
Force Geophysics Laboratory, Cambridge, Mass., can be used fbr
computing atmospheric transmission knowing t h e local
meteorological conditions (temperature, relative humidity and visual
range). It is currently the most widely accepted standard for
computing atmospheric propagation. The model does not take into
account man-made aerosols such as battlefield smoke, dust, etc.
Fog and clouds scatter infrared radiation strongly, and as such
infrared systems cannot be considered to have all-weather capability.
5.7.4
Emissivity
Qualitatively, by the term infrared emissivity E of a n object is
meant its ability to emit infrared radiation relative to that of a black
body. The rate of emission of a black body is the highest compared
to any other body under identical conditions, and hence the rate of
emission of all other bodies is compared with that of a black body.
The emissivity of a body is the ratio of the radiant emittance
of the body to that of the black body under identical conditions.
According to this definition, the emissivity of a black body is unity,
that of a perfectly reflecting body is zero, and all other bodies have
emissivities ranging from zero to one.
Emissivity of a material is more a surface property than that
of the bulk material. It depends upon the nature of the material,
surface conditions of the material, wavelength and temperature.
Besides these, there are other factors which have to be specified.
In this context, several emissivities are introduced. They are: i)
directional emissivity E, which is the emissivity determined a t an
angle 0 to the surface per unit solid angle, ii) normal emissivity &,
which is the emissivity corresponding to 0 = 0 and iii) hemisphekal
Infrared Camouflage
11 1
1 12
Introduction to Camouflage &SDeception
emissivity chwhich is the emissivity of a source radiating into
a hemisphere. It is given by2
w
I &(a)wa&
5-12
where ~ ( h ) i sthe spectral emissivity over a narrow band of
wavelengths hand X+dh. We may classify bodies into three categories
on the basis of the variation of €(A):
i) For a black body ~ ( h= )E = 1
ii) For a grey body ~ ( h=) E = constant less than unity.
iii) A selective radiator for which ~ ( hvaries
)
with wavelength.
radiator
Wavelength
8
B
8
.r(
elective radiator
3
g
%
I?
rn
Wavelength
Figure 5.3.
(a)Wavelength v s spectral emissivity (b) wavelength vs
spectral radiant emittance for black body grey body, and
selective radiator.
Sow:
Reprinted by permission of John Wiley & Sons. Inc. from Infrared System
Engineering by Richard D. Hudson (JR) copyright Q 1969 by John W i &
Sons Inc.
Infrared Camouflage
Figure 5.3 shows the variation of spectral emissivity and
spectral radiant emittance of the three classes of radiators.
The concept of a grey body is useful because heat sources
such as jet tailpipes, terrestrial bodies, personnel, etc. can be taken
as grey bodies for engineering calculations. Also, selective radiators
can be treated as grey bodies over a limited spectral interval.
h a n d E,., assume special importance, as, to a large extent, all
infrared detection systems depend for their action on the radiant
fluxcontained in a small solid angle in a given direction. Actually,
except for polished metallic surfaces, there is no significant
variation2 between E ~q,,,and E,.
5.7.4.1
Measumment of € @ i r e dembsivity
Methods for the determination of ernissivity may be broadly
divided into two classes: i) direct methods and ii) indirect methods.
There are two direct methods: a) calorimetric and b) radiometric.
The calorimetric method measures the total hemispherical
emissivity, i.e., in the wavelengths extending from zero to infinity.
This method is not suitable where emissivity is required in a narrow
band of wavelengths. Radiometric method uses spectroradiometers
or broad band pyrometer (thermometer). In this method the radiant
flux emitted by the source or surface is measured directly. It is
quite satisfactory for the measurement of spectral emissivity or
the total emissivity. Measurement of emissivity in 8 - 14 pm band
of opaque or partially transparent/transparent materials was
carried out by Mukherjee, et all3 by employing Minolta Land
Compac-3 IR thermometer, Lillesaetar14 measured emissivity of a
wide variety of materials by a radiometric outdoor method. The
accuracy of the method compared favourably with that of the other
methpds covering the wavelength band 8 - 14 pm according to the
author.
The difficulties involved in the direct method can be overcome
by indirectly arriving at the emissivity from the measurement of
reflectivity. These methods use an infrared spectrophotometer and
a suitable reflectance attachment. The physical basis for this
measurement is that the spectral ernissivity &(A) is given by15
4 4 = ~ - [ p d & + & ( A ) + r,(a)+ rr(AJ]
5- 13
In the case of opaque materials, the diffuse and regular
(h) and T~ (h) vanish, and for a
components of transmittance II~
rough surface the regular reflectance p, (h) also vanishes and
therefore ~ ( hdepends
)
only on the diffuse reflectance pd (A)
Hence €(it)=
1 -[pd (Ai)l
5- 14
113
114
Introduction to Camouflage & Deception
Polished metals, such as aluminium, copper and nickel, have
emissivity of the order of 0.05, and polished cast iron has a higher
emmissivity of about 0.2. Building materials such as sand, brick,
cement and wood have emmissivity of the order of 0.9, water has
still higher value of the order of 0.95 and human skin a s high as l2
Metals have a low emissivity and non-metals have a high ernissivity.
As temperature increases, the ernissivity of metals increases with
the formation of oxide layer. In the case of non-metals the emissivity
decreases with temperature. The radiation emitted by any material
originates from the surface, confined to a few microns. So surfaces
coated with paint have the emissivity of paint.
5.7.5
EnrAssivity and Temperature Effects o n Contrast
Infrared surveillance systems, in order to detect any military
target, make use of contrast between the target and the background.
In the near infrared region the contrast is caused by difference in
reflectivity between the object and the background. In the thermal
infrared (MIR and FIR) it is caused by the difference in the radiant
emittance between t h e object a n d background. For
countermeasures in the near infrared, the reflectivity has to be
appropriately matched, and in the case of thermal infrared the
radiant emittance of the object relative to the background has to
be brought down. Although it is the radiant emittance of the object
with respect to the background which is important, we are more
familiar with the quantity 'emissivity', and its value for various
materials is available in literature. Further, it gives a better idea as
to the detectability of the target and the degree of reduction of
radiant emittance required to reduce the detectability. Hence we
shall devote a little more attention to this property and its relative
importance in relation to the temperature of the body in producing
thermal contrast.
5.7.6
Relative Effects of Temperature and Emissivity
Differences on the Radiant Flux per Unit Area.
Let us examine the two parameters-emissivity and temperature
of a body-and their relative importance to radiant emittance which
contributes to the contrast with respect to the background. It is
not possible for the infrared imager to indicate whether the contrast
in the imaged scene is caused by differences in emissivity or in
temperature.
Let u s consider the emissivities E and E + de and temperatures
T and T + dT16.l7 and see the change on radiant emittance, W.
Infrared CamoufIage
We can consider three cases:
(i) Entire spectrum of radiation where Stefan-Boltzmann law is
applicable;
(ii) Quasi-monochromatic radiation;
(iii) A finite spectral band.
Case i: Variations in the total radiation
(where W = dP)
i.e., a relative change of 0.1 in temperature causes a relative
change of 0.4 in W which is equivalent to a relative change of 0.4 in
emissivity. This would imply that temperature changes are quite
influential. But for most ambient measurements where T is about
300 K, emissivity has the stronger influence.
Case-2 Variations in quasi-monochromatic radiation
Let u s take the case where the sensor spectral band is almost
monochromatic (1 pm wide) at 10 p.m.
In this case the radiant emittance is given by Planck's law
W, = ~ ( hc,X-~
) {exp(x)-1)-I W C ~pm-I
- ~
5-17
where x = c2/hT
and the relative change is given by
At the wavelength that maximises radiant contrast with respect
to temperature the relation reduces to
For the case T = 300 K and E = 1 for monochromatic radiation
at the maximum difference, the equation is
Case iii: Variationsfor ajinite spectral band
In this case also it can be shown that for T = 300 K and E = 1,
the relative change is given by
I 15
1 16
Introduction to Camouflage & Deception
Thus it is apparent from the above discussion that for 300 K
the effect of emissivity is much greater than that of temperature.
5.8
INFRARED SENSORS
A knowledge of infrared sensors, sensing systems and their
capabilities is of great importance in the design and development
of infrared countermeasures.
The history of infrared sensing systems may be divided into two
parts: pre-World War-I1 scenario and post-World War-I1 scenario.
5.8.1
Pre-World War II Scenario
During wars, before the advent of infrared sensing systems,
night remained a moment of quiet except that patrols to a limited
extent were carried out in the no-man's land. Infrared sensing
systems extended the human vision beyond the visible end of the
red region of the electromagnetic spectrum and enabled fighting at
night18.
The history of night vision appears to have started during the
period 1910-20, when several patents were taken in this field.These
devices were intended for detection of aircraft, artillery, personnel
etc. One such infrared system could detect aircraft a t a distance of
1 mile and people at a distance of 1000 ft2. During 1941-43 the
Germans incorporated an image converter in the fire control systems
of battle tanks. The device proved to be very effective during night
operation2.In 1945, US employed an image converter together with
a n illuminator mounted on a rifle, enabling a soldier to fire
accurately in total darkness a t targets located a t a distance of 75
yards. This was known a s Sniperscope2.lo. Another device developed
by US was Snooper-scope. This made it possible to drive
vehicles a t night. It had a n image converter and a n infrared
illuminator 2* l . Several other infrared equipment reached limited
operational status during World War 11. Some of the American
equipments were: i) infrared guided bombs, and ii) scanning systems
for detection of object by the thermal radiation emitted by them2.
Besides these devices, infrared sensitive photographic films
sensitive to the range 0.75-0.9 pm were used to detect military
objects covered with cut vegetation. Till World War 11, military
infrared did not receive much attention. Military infrared,
subsequently, particularly infrared sensing systems, have rapidly
progressed, enhancing their capabilities manifold. US, Germany
and Japan in particular have visualised the potentialities of the
infrared region of the electromagnetic spectrum in the battlefield.
Infrared Camouflage
5.8.2
Post-World War I1 Scenario
Vietnam war clearly brought out the limitations of the
existing night vision technology and the requirement of new
technol~gies'~.
During late 1950s information on heat seeking infrared guided
missiles-Sidewinder and Falcon-was made available in open
literature2.
It is basically a system which optically focuses the infrared
radiation emitted by the scene, mechanically scans the infrared
image across a detector and converts it into an electrical signal
which is then transformed into a visual image'K19.20.
US Army, in 1952, under the name Thermograph, built the
first thermal imager2'. During 1956-62 a number of thermographs
were developed for the US army. In 1956 the first real time thermal
imager under the name FLIR (Forward-LookingInfra-Red) was built
at the University of Chicago with the support of the Air Force. In
1960, Perkin Elmer Corporation developed a thermal imager under
the name Prism scanner for the US army. The period 1960-74 saw
the development of sixty different FLIRs and production of several
hundreds of them. Since then spectacular advances have taken
place in thermal imaging technology. All the developments were
aimed at meeting the military requirements in the field. The desirable
requirements are long range, satisfactory operation over wide range
of temperatures, good spatial resolution and large field of view.
The important field constraints are size, weight, power consumption,
field maintenance and cost.
Advances in the field of electro-optics, infrared detector
materials and solid state electronics have all immensely contributed
to thermal imaging technology. Developments in the area of infrared
lasers have enhanced the capabilities of thermal imaging systems.
In the field of guided missiles, developments towards application
of infrared seekers to autonomous target acquisition munitions
are taking place22.Work in the area of digital image processing of
thermal infrared images is also being pursued.
US, France, Germany and UK are actively involved in R&D in
the area of thermal imaging technology which would radically
enhance the operational capability of armed forces during night
and day23.
The capability of thermal imaging systems has been amply
demonstrated when U S Forces employed these devices in the
Operation "Deseit Stormn during Iraq War. The American Forces
had a great advantage in their ability to move forces a t night to a
critical position and to attack the enemy who could not seez4.
117
1 18
Introduction to Camouflage & Deception
5.8.3
Data Presentatio
Conversion of
Radiation from the
Scene
Principle of an Infrared
Sensing System
The principle of a n infrared sensing
system is diagrammatically shown in
Figure 5.4.
It essentially consists of three steps:
(i) The infrared radiation emanated by the
target scene is converted into electrical
signals with the help of a transducer
which is a n infrared detector;
(ii) The electrical signals are processed
suitably;
(iii) The processed electrical signals are
presented in a form applicable in the
intended role. From the time the
infrared radiation is collected from the
scene, till it is presented or used in a
suitable form- viz, visual, digital or
some o t h e r form, t h e physical
processes involved are many and
complex. The final data presentation
d e p e n d s o n t h e n a t u r e of t h e
application.
5.8.4
Classification of Infrared
Sensing Systems
Infrared sensing systems which are
basically electro-optical in nature may be
classified a s active and passive systems,
or imaging and non-imaging systems. In
a n active system the scene of interest is
i l l u m i n a t e d by a n infrared s o u r c e
(including laser beams) and the reflected
radiation is utilized for sensing the target.
In a passive system the thermal radiation
emitted by the object is collected by an
optical system and further processed to
obtain the necessary information. In an
imaging system the data are displayed in
an image form similar to a TV picture. In
a non-imaging system the o u t p u t is
utilized in different forms depending upon
the nature of the application.
Infrared Camouflage
Infrared engineering deals with the detection, signal processing
and display of infrared radiation in a manner depending on the
nature of the application. The infrared systems engineer should be
familiar with physical and geometrical optics, infrared physics,
electronics for signal processing and electro-optics.
5.8.5
Infrared Detectors
The detector is the most important element of an infrared
system. All other components are designed and built around it.
Basically, an infrared detector is a transducer of radiant energy
that converts the energy into some other suitable form such a s a n
electric current or for affecting a photographic film, or change some
physical property2.
Broadly IR detectors may be classified into:
i)Thennal detectors and ii) Quantum detectors. Besides, those
that do not fall under these two categories may be discussed under
'miscellane~us'~.
The first 1R detector was of thermal type - a thermocouple
which was used by Herschel in his initial experiments on infrared
radiation during 1830s2t3. In 1880 came the bolometers which are
also of the thermal category. In the beginning of the 20th century
came the quantum detectors which are being widely used since
then. Quantum detectors have been steadily advancing with
developments in semiconductor materials a n d solid state
electronics, leading to two-dimensional detectors known a s staring
arrays. Work has been in progress to develop detectors responding
to far infrared region beyond 15 pm. Developments in solid state
physics and material science such a s growing of super-lattices by
molecular beam epitaxy (MBE) are all leading to more and more
types of IR detectors responding to far infrared radiation.
5.8.5.1
Thermal detectors
In a thermal detector, the heating effect of the infrared radiation
causes a change in some electrical property of the detector material.
In a thermocouple, rise in temperature of the hot junction sets in
an emf. In a bolometer, which is a metal, there will be a change in
electrical resistance. In a thermistor, which is a semiconducting
material, there will also be a change in electrical resistance. In
pyroelectric materials the heat produced results in a change in
electrical polarization of the material.
A thermocouple consists of two junctions made out of two
dissimilar metals. A typical thermocouple consists of a copper wire
and an iron wire joined end to end such that two junctions are
formed. The junction which absorbs the incident infrared radiation
119
120
Introduction to Camouflage & Deception
is known a s the hot junction and the other junction which is
maintained at constant lower temperature is known as the cold
junction. The difference in temperature between the two junctions
sets u p a thermo-emf which is proportional to the increase in
temperature of the hot junction. A number of thermocouples are
available, some of which are copper-constantan, bismuth-silver and
bismuth-bismuth-tin alloy. With a good thermocouple temperature
differences of the order of 10-6OC can be detected. A number of
thermocouples connected in series constitute a thermopile.
A bolometer consists of two identical strips of a metal sach
as gold which are connected to the opposite arms of a Wheatstone's
bridge. Initially, when there is no radiation, the bridge is balanced.
When radiation is incident on one of the strips of the bolometer
there will be a change in its electrical resistance resulting in an
imbalance of the bridge. A typical value of the temperature
coefficient of electrical resistance of a bolometer material is 0.5
per cent per OC2.
Thermistor infrared bolometers were developed by Bell
Telephone Laboratories during World War-I1 . A change in the
electrical resistance of the thermistor is converted into an electrical
signal with the help of a bias voltage applied across the thermistor.
. Thermistor bolometers have temperature coefficient of resistance
a s high a s 4.2 per cent per OC2.
Characteristics of thermal detectors
(i) The response of the thermal detectors is independent of the
spectral characteristics of the incident infrared radiation;
(ii) They can operate a t normal, ambient temperature such that
cooling is not required;
(iii) They have comparatively low sensitivity and slow response.
Their time constant is of the order of a few milliseconds. As
such, they are not applicable in search systems or other online situations where high data rates are required2.
Thermistor bolometers are rugged and their high resistance
helps their matching to a n amplifier. Various thermistor materials
and their characteristics are discussed in refren~es~'-'~.
Superconducting bolometers have come into the field in
comparatively recent years. During the transition from normal
to superconducting stage there is tremendous reduction in the
electrical resistance. At this stage the temperature coefficient of
resistance is of the order of 5000 per cent per OC.Niobium nitride
is one s u c h material which is u s e d i n superconducting
bolometers2.
Infrared Camouflage
5.8.5.2
Quantum detectors
In a quantum or photon detector, the photons of the infrared
radiation interact directly with the electrons of the detector material
resulting in direct electrical conversion of radiation. Quantum
detectors may be classified under the following groups3 :
(i) Photoconductive type (Intrinsic)
(ii) Photoconductive type (Extrinsic)
(iii) Photovoltaic type
(iv) Photoemissive type or Schottky barrier type
(v) Photoelectromagnetic type
(vi) Blocked impurity band type
In general, an interaction between a photon and a n electron
of the atom of the detector material results in the ejection of the
electron. If it has sufficient energy, it escapes from the surface of
the detector material. This phenomenon is known as photoelectric
or photoemissive effect. In contrast to this effect which may be
called external photoelectric effect (as the ejected electron is
observed outside the boundary of the material) there can be several
internal photoelectric effects. This happens especially when the
infrared photons are of wavelength greater than 1.2 pm. In a
semiconductor the incident photon can lift a n electron from a nonconducting state to a conducting state so that a charge carrier is
available for conduction. In photon or quantum detector this is the
type of interaction that takes place, resulting in an electrical signal.
Photoconductive intrinsic type detector
In this category, as a result of interaction between the infrared
photon and an atom of the semiconductor, an electron from the
valence band jumps into the conduction band crossing the forbidden
band. In this process a hole is created in the valence band. For
every electron that jumps into the conduction band there will be a
corresponding hole in the valence band. The necessary condition
for this type of interaction to occur is that the energy carried by the
incident photon hv 2 Eg, where E, is the bandwidth of the forbidden
band. The cut-off wavelength of the infrared photon h, = hc/E, =
1.24/Eg,where E, is in electron volts2.
When the detector is biased by applying an electric field,
changes in the number of charge carriers vary the current flowing
through the detector. This is the principle of action of the
photoconductive intrinsic type of detector. In these type of detectors,
the bandwidth of the forbidden band is less than one eV. The
conductivity is controlled by electrons as well as holes. The first
121
122
Introduction to Camouflage & Deception
photon detector was developed in 1920. It was photoconducting
thalluim sulphide with a thermal response u p to 1.2 pm. Lead
sulphide was developed between the two World Wars3. Some of the
important intrinsic photoconductive detectors a r e silicon,
germanium, lead sulphide, lead selenide, indium arsenide and
indium a n t i m ~ n i d e ~ O - ~ ~ .
Photoconductive extrinsic type detector
The smaller the bandwidth of the forbidden band, the larger
will be the cut-off wavelength a t which the detector responds. This
is accomplished by adding controlled amounts of impurities into a
pure semiconductor. When a pentavalent impurity is added to
intrinsic germanium it becomes a n n-type semiconductor. When a
trivalent impurity is added it becomes a p-type semiconductor. In
the n-type, majority current carriers are electrons, and in the ptype the majority current carriers are holes. Doped germanium is
used in a number of infrared detectors.
Although in principle both p and n types can be used, only
the p-type is being used in IR detectors. The incident infrared photon
should satisfy the condition that hv 2 E, where E, is the energy of
the acceptor above the valence band. These type of detectors need
cooling, a s otherwise a t ambient temperature the energy of thermal
agitation is large enough to release charge carriers, and none would
be left for photon excitation. Detectors of this category responding
to wavelengths in the range 3-8 pm need cooling to 77 K and those
responding beyond 8 ym need cooling down to a few degrees from
absolute zero.
Photovoltaic detector
This type of detector consists of a p-n junction formed by
introducing trivalent and pentavalent impurity atoms into an
intrinsic semiconductor. The infrared photons give rise to electronhole pairs which are separated by the electric field inbuilt in the
material a t the junction. It has the advantage that it is a selfgenerating device, as it does not need any bias supply. Some of the
important photovoltaic detectors are silicon and indium arsenide2.
A photovoltaic detector is also known as a photodiode. The basic
difference between a photoconductive detector and a photovoltaic
detector i s t h a t i n t h e former there i s a n external bias
supply whereas in the latter a photovoltage is formed a t the p-n
junction.
Photoemissive or Schottky barrier type
Photoemission is very much used in the near infrared region.
In such devices the released photoelectrons enter into a vacuum
region, whereas in a Schottky barrier detector the released
photoelectrons are collected in a semiconductor such as silicon.
lnfrared Camouflage
There exists a barrier potential I$,, a t the interface between the
metal and the semiconductor and the incident photon e n e r a must
be such thatZ0$,,<hv < E,
Fig. 5.5 shows the Schottky barrier type detector 3.
CONDUCTION
BAND
C
I:g
i
'
v -------
!
,
,
-.. .
-- --
,..--
-
..
.
.
.
.
--
.
;
-
--
v
-
-.- -.
E~
----------..-.
-
-- .-- -.
_-+
VALENCE
BAND
1 .1 ' 1
+.-
v
2
-.
Qnls
Figure 5.5.
Schottky barrier type detector.
Source:
Reprinted with permission from Wiley-VCH verlag Gmbh, Weinheim.
Photo-electromagnetic type detector
When a magnetic field is applied perpendicular to the direction
of current to an intrinsic type photoconductive detector the electronhole pairs are separated. These can operate upto 7 pm and at room
temperature. Figure 5.6 shows the photo-electromagnetic type
detector.
Their performance is inferior to that photoconductive or
photovoltaic type and they are hence not much used.
Blocked impurity band type
This is basically a n extrinsic type of photo-conductor. It is
made by epitaxy and silicon doped with arsenic. It operates a t 10 K
and h = 15 pm3
5.8.5.3 Far infrared materials
As the wavelength of the infrared radiation increases, the
energy carried by the photon becomes less. At such low energies
the thermal noise becomes a serious probiem. Today's practical
123
124
Introduction to Camouflage & Deception
upper limit for detection is 200 pm. But with developments that
are taking place in superconductor technology and with the
availability of high T, superconductors the longer wavelength limit
will further increase3,35-37.
Incident
Radiation
//
Ohmic
contact
I
L
Magnetic field
Signal voltage or current
Figure 5.6.
Photelectromagnetic type detector.
Source:
Reprinted with permission from Wiey-VCH verlag Gmbh,Weinheim.
General Discussion on IR Detector Materials
Lead sulphide (1 - 3 pm) operating in the range 300 - 77 K has
been in use for the last five decades. PbSe (1-7 pm) operating in the
range 300-77 K has been in use in IR systems for missile guidance
and control, aircraft search and tracking systems and IR night
vision.
Indium antimonide (1-5 pm) is used a s a photodiode p-n
junction.
Several advances have taken place in the development of
mercury-cadmium-telluride during 1977-86. It is used for operation
in 8-14 pm region operating a t 77 K. It is a semiconductor detector
of the greatest practical importance and performance".
5.8.6
Pb-Sn-Te, Si:In, Si:Gu, Pt-Siare others which are being used to
cover 1-15 pm. Schottky diode has been the most recent one and it
does not need cooling.
Infrared Camouflage
Materials for pyroelectric detectors
Materials for pyroelectric detectors are3:
Triglycine sulphate (TGS)-single crystals; Organic films :
Polyvinylidine difluoride (CH, - CF,) n (PVDF),
Ceramics : LiTaO,, PbTaO,, PbTiO,, Pb,, La, TiO,,
PbZrj, Tix03,Pb La, (Zry Ti,J,, Mn203,
PbZrO, - PbTiO, - Pb,FeNbO, - UO, (PZFNTU)
,
Performance Characteristics of a Detector
5.8.7
The responsivity2 of a detector gives the performance of a
detector. It is the detector output per unit input. The responsivity
R = V, / HA,
5-22
where, R is expressed in V W-', V, is the rms value of the
fundamental component of the signal voltage, H is the rms value of
the fundamental component of the irradiance on the detector
expressed in W m-2and A, is the sensitive area of the detector in
m2.The response time of a detector is the time taken by the detector
for its input to reach 63 percent of its final value after a sudden
change in the irradiance. Although responsivity is a convenient
parameter it does not give any indication of the minimum radiant
flux that can be detected. Noise is always present in the output of
the detector which obscures the signal.
5.8.7.1 Noise equivalent power (NEP)
Noise Equivalent Power (NEP) takes into account the noise
facto?. NEP is the radiant flux required to generate an output signal
equal to the detector noise.
NEP = HA, / (V,/V,) = HA, V, / V,
5-23
where NEP is expressed in watts, V, is the rms value of the
noise voltage a t the output of the detector.
5.8.7.2
Detectivity (D)
The best detector is the one with the lowest NEP. Accordingly,
detectivity (D) is defined a s the reciprocal of NEP.
D = 1/ NEP where D has the units of W-l. The lower the NEP,
the higher will be the detectivity.
Detectability depends upon several factors2,chief of which are
wavelength of the incident radiation, temperature of the detector,
area of the detector, bias current applied to the detector, chopping
frequency and bandwidth of the circuit used to measure detector
noise.
Jones38introduced the quantity D*, the detectivity referred to
an electrical bandwidth of 1 Hz and a detector area of 1 cm2.
125
126
Introduction to Camouflage & Deception
1
D'
=D ( A ~ A =
~ ) NEP
~
D* has the units of c m ( H ~ ) W-I
' / ~ when A, is measured in cm2
and Af is in Hz. The significance of D* is that it is the signal-tonoise ratio when 1 watt is incident on a detector having a sensitive
area of 1 cm2and the noise is measured with an electrical bandwidth
of 1Hz.
5.9
INFRARED SENSING SYSTEMS
We shall now discuss some of the important infrared sensing
systems employed in war starting from World War 11.
5.9.1
Infrared Telescope
During World War-I1 a night vision system which is basically
an infrared telescope was used for night operations in several
applications. The heart of the system is an image conversion tube
which is sensitive to 0.8- 1.2 pm. When infrared radiation covering
these wavelengths impinges on the system it gets converted into
visible radiation. The telescope consists of a n optical system for
focusing the radiation, a photocathode consisting of silver oxide cesium layer (known a s S 1-photocathode sensitive to 0.8 - 1.2 pm),
a n electrostatic focusing system, a phosphorescent screen
and a n eyepiece. Such a n infrared night vision system is shown in
Figure 5.739.
I Voltage
Objective
<
/
Light
input
,
\
\
!
,
.
: ii,
'
/
i\
Visible output
/I
,
.
>
Electrons
---,
@,>
'
i
I
I
,t
I
\,
'R
1
,
3
,,
.
.
' /
?
\
,
,7
Eyepiece
Photocathode ( S 1 )
Phosphor screen
Figure 5.7.
Infrared telescope (IR night vision system, early
version).
The scene of interest is illuminated by infrared radiation from
a tungsten lamp fitted with a n infrared filter. The reflected radiation
from the scene is focused by an objective system, either of the
Infrared Camouflage
refractive or reflective type, on to the photocathode such that an
image of the scene is formed on the photosensitive material. The
photocathode emits electrons under the influence of the radiation.
The electrons released in this interaction are of thermal energy but
are accelerated under the influence of electrostatic field to
sufficiently high energies. The energised electrons a r e
electrostatically imaged on P-20 phosphorescent screen. The screen,
upon receiving the electrons, releases a large number of visible
photons. Such a system forms a n image of the scene on the
phosphorescent screen with sufficient level of illumination and
resolution which are within the range of human vision.
This type of instrument was put to use in the following
applications i) Battlefield surveillance (1000 m), ii) Weapon sights,
iii) Driving binoculars, and iv) Periscopic instruments for tank or
armoured vehicles.
This type of infrared telescope used in World War I1 belonged
to the generation of Zero Image Intensifier Tube. The system suffers
from the disadvantage that it is active and the enemy can detect
the source of infrared radiation.
Several developments have taken place in night vision
technology under the class of passive image intensifiers which utilize
the background light at night generated by moon and stars. These
systems have superseded the infrared telescope, and the system
being passive cannot be picked u p by the enemy2~20~40~41.
5.9.2
Vidicon
Vidicon2 is similar to television camera. It consists of a small
evacuated tube, one end of which is sealed with a flat and transparent
plate. The inner side of the plate has a transparent electrically
conducting film. It serves a s signal electrode. Over the film is
deposited a photoconductive material. At the other end of the tube
is an electron gun. The electron gun releases a stream of electrons
which scans the photoconductive layer. This is accomplished by
deflecting coils mounted outside the tube. The signal electrode is a t
a higher potential than the photocathode. The electron beam, in the
absence of incoming radiation, keeps the back of the photocathode
at the same potential a s the cathode film. When infrared photons
enter the system through the transparent window and the
transparent and electrically conducting film, electrical conductivity
changes, which reduce the potential difference between the front
and back of the photocathode. By the scanning of the electron beam
an electrical signal is generated. Depending on the type of detector
used, cooling is done. Detectors responding u p to 13 pm are
employed.
Orthicon is another TV type camera which is of the
photoemissive type with a cut-off wavelength of 1.3 pm 2.
127
128
Introduction to Camouflage & Deception
Photothermionic Image Converter
This is known a s thermicok. In this, photoemission varies
according to thermal radiation absorbed. The heart of the system
is a multilayer film of thickness of a fraction of a micron. This is
known a s retina. The scene of interest is imaged on the retina so
that a thermal image is formed on it. A flying spot scans across the
retina, thereby releasing photoelectrons. The n u m b e r of
photoelectrons emitted at any point i s proportional to the
temperature a t that point. Thermicon has a spectral response up
to 12 pm2.
5.9.4
Infrared Photography
The normal infrared film has a sensitivity upto 0.9 pm. The
sensitivity can be extended upto 1.3 pm by applying certain dyes.
Such films respond to reflected infrared radiation from different
objects in the scene. The infrared reflectivity varies with the object,
especially when objects in the battlefield are covered with cut
vegetation. The IR reflectivity of cut vegetation drops with time.
This is because the reflectivity of vegetation depends upon the
chlorophyl content and with time the chlorophyl content drops
down. Objects camouflaged by cut vegetation cannot be detected
by photography in the visible region whereas they can be detected
by near infrared p h ~ t o g r a p h y ~ , ~ ~ . ~ ~ .
5.9.5
Evaporograph
When a n oil film is exposed to thermal radiation, the film
undergoes evaporation differentially depending on the temperature
profile. The film is supported by a material which h a s high
absorption coefficient for infrared radiation. The thermal image,
depending on temperature variation, gives rise to corresponding
variation in the thickness of the oil film. The film is viewed under
reflected light. The interference effects in the reflected light form
an image which can be viewed2.
5.10
THERMAL IMAGING SYSTEMS
Thermal imager, in contrast to a n infrared telescope which is
a reflection-band device, is a radiated band system. The image
formed by a thermal imager is similar to black and white TV picture.
5.10.1
Basic Elements of a Thermal Imaging System
The salient features of a thermal imaging system44are :
(i) An objective lens system
(ii) A mechanical scanning system
(iii) Detector elements
(iv) A cooling system
(v) Signal processing section, and
(vi) Display unit (computer)
Figure 5.8 shows the principal components of a thermal
imaging system44.
5.9.3
Infrared Camouflage
m m * ) m L O U ) m
130
Introduction to Camouflage & Deception
5.10.1.1
Objective lens system
The objective lens system picks up thermal radiation from the
scene. The principal component of the objective system is a
converging lens which is made of germanium. Germanium has a
good transmission in the infrared and it can also stand the rigours
of the battlefield conditions.
5.10.1.2 Optomechanical scanner
The radiation collected by the objective lens system falls on
the scanner. The scanner consists of a set of eight mirrors fixed on
a rotating drum. Each of these mirrors is fixed to the rotating drum
in such a way that they are at different angles from the axis of
rotation of the drum. The entire scene may be imagined to consist
of a number of horizontal bands. A s the drum rotates, the mirror
that faces the scene collects the radiation from one of the bands of
the scene. The design of the scanner is such that by the time it
makes one complete revolution the entire scene consisting of the
eight bands will be covered by the eight mirrors. The radiation
reflected by the mirrors will fall on the detector arrays. A s the
detectors receive the reflected beam, each band of the scene is
further split into lines, i.e., each detector scans different parts of
the scene. The detectors can also be arranged horizontally instead
of vertically. Detectors arranged vertically provide parallel scanning,
and detectors arranged horizontally provide serial scanning.
5.10.1.3 Detector bank
The detector elements chosen depend upon the wavelengths
at which the system is required to operate. If the system is required
to operate in 8-14 pm band, the detector material is Hg-Cd-Te, and
if the system is required to operate in 3-5 prn band the detector
material is InSb.
The number of detector elements to be used depends upon a
number of factors: performance in terms of response, spatial
resolution, scanning mechanism, cooling system, etc. The Hg-CdTe or InSb detector requires cooling to -196°C (77 K) employing
liquid nitrogen. There are several ways by which liquid nitrogen
can be supplied to the detector array:
(i) The liquified gas can be kept in an open vacuum flask from
which it can be fed to the detector array;
(ii) By employing high pressure from a container and JouleThomson effect, the gas can be cooled and supplied to the
detector; or
(iii) By utilizing a closed cycle refrigerator.
Infrared Camouflage
Each method has its own advantages and disadvantages. Of
the three, however, the third one, although expensive, is preferable,
since it has no logistic problems.
5.10.1.4 Electronic signal processing and display
The signals from the various detectors enter a n amplifier
section from where, through a multiplexer and signal processing
section, they may be displayed on a computer display.
5.10.1.5 Performance characteristics
The two important characteristics of a thermal imaging system
are:
(i) Spatial resolution or angular resolution
(ii) Thermal resolution or temperature sensitivity
The sharpness of the picture depends on the angular resolution.
The angular resolution which is expressed in radians is the effective
width of the detector element divided by the focal length of the infrared
optics. The angular resolution is typically of the order of one
milliradian and can also be a s small as 0.5 milliradian. Angular
resolution is also referred to as the instantaneous field ofview (IFOV).
Thermal resolution is a measure of the smallest difference in
temperature that can be resolved. This primarily depends upon
the performance of the detector. Temperature resolution is
expressed in two ways:Noise Equivalent Temperature Difference (NETD)which is the
temperature difference for which the signal-to-noise ratio at the
input to the display is unity.
The Minimum Resolvable Temperature Difference (MRTD) is
the smallest temperature difference that is distinguished on the
display. It is of the order of 0.3 K and can be a s small a s 0.1 K. The
temperature resolution depends on several factors, viz., optical
system performance, detector performance in terms of its sensitivity,
and the signal-to-noise ratio of the signal processing circuitry.
5.10.2
Applications of Thermal Imaging System
The infrared thermal imaging systems find application in all
the theatres of war-land, air and sea44.
5.10.2.1 Land applications.
These include: (i)Surveillance - for gathering intelligence about
the deployment or movement of men, vehicles and equipment, (ii)
Target acquisition - for detection, identification and location of
targets for analysis and engagement, (iii) Night observationobservations can be carried out in darkness at considerable distances.
The entire land applications are referred to as STANO. In order to
carry out STANO, thermal imaging systems ranging from hand-held
devices to tripod - or vehicle-mounted systems are used.
131
132
Introduction to Camouflage & Deception
For fire control, thermal images can be used where direct or
indirect fire weapons are deployed. In the case of tanks the thermal
imager is incorporated into the gunner's or commander's sight and
a laser range finder is also integrated with the system. In the case of
artillery fire control, the fall of shot can be observed by the earth or
dust thrown u p by the shell. In the case of air defence, against the
cold sky background the warmer aircraft and helicopters can be
detected a s they provide good contrast. Depending upon the nature
of the application, the thermal imager can be simple or sophisticated.
For night vision for the antiaircraft gun, a relatively simple design
is adequate, whereas for a surface-to-air missile system a multimode
thermal imager controlled by a computer might be necessary.
5.10.2.2 Air-borne applications
Thermal imagers can be used in fixed wing aircraft, helicopters
and remotely piloted vehicles. In the case of fixed wing aircraft,
they are used for navigation/attack for bombers, strike aircraft
etc. These are referred to a s Forward Looking Infrared (FLIR).These
are different from Downward Looking Infrared (DLIR)Line Scanners.
These scanners scan the ground in the form of a strip along the
aircraft track. The FLIR a s well as DLIR basically work in the same
manner. The data can be obtained in digital form or in visual form,
recorded on a photographic film, or a s a picture in real time. I n
the case of navigation, the FLIR provides an unjammable and
clutter-free display. In the case of attack on ground targets, FLIR
in conjunction with a laser target designator/range finder is used.
FLIR in airborne applications is usually housed in a pod as
a retrofit. In the case of helicopters also it can be fitted in a pod. In
the case of remotely piloted vehicle where it is under ground control,
the thermal imager would need to be stabilized and the pictures
are transmitted to a base via a broad band data link for real time
viewing.
5.10.2.3 Sea applications
The thermal imagers are used principally for defence against
air or missile attack for detection and tracking of airborne targets
a t short to medium ranges. Long range performance is less reliable
owing to the long and frequently moist atmospheric path to the
target. In certain circumstances at sea, 3-5 pm band will give better
range performance than 8-14 pm band.
FLIR finds application in maritime patrol aircraft which
undertake passive search, surveillance and investigation tasks at
night such a s antisubmarine warfare (ASW) and offshore monitoring.
Infrared Camouflage
5.10.3
Manufacturers
Barr and Stroud have Limited designed and manufactured a
range of thermal imaging equipment44.One such system about
which information is available in open literature is SHORTIE. It is
an acronym for Short Range Thermal Imaging Equipment. It covers
a range of 10 km. It has the following features :Waveband for operation
Objective lens system
FOV (horizontal)
Spatial resolution
Thermal resolution
Scanner
Detector
No. of lines
Cooling
Display
Frame rate
Power
8-14 ym
150 mm diameter
germanium lens
Over 100 millirad
Better than 0.5 millirad
0.3OC
Mirror drum parallel scan
Hg-C-dTe
About 260
Liquid nitrogen
(8 hours/change or
Joule-Thomson minicooler)
CRT (can be remotely
viewed)
25/s.
25 V batteries
Another manufacturer is M / s N.V. Optische Industry De Dude
Delft, which under the name Infrared Line Scanner has designed
and developed thermal sensors40. The system has interchangeable
detector units for 3-5 pm and 8- 14 pm. It has angular resolution of
20 millirad and the image can be recorded on 70 mm photographic
film. It is cooled by a closed cycle cooler requiring no refill.
Differences between Thermal Imaging System and
5.10.4
Image Intensifier
The difference between a thermal imager and image intensifielA2
is that in the latter the signal photons are emitted into vacuum
and subsequently processed, whereas in the former separate
sensing elements are connected to their dedicated amplifiers from
where the signals go to a display unit. The intensity of an element
in the display unit is proporational to the radiant intensity of the
corresponding point in the scene. The display can be observed
directly or a t some other location through a video.
The resolution of thermal imager is less than that of the image
intensifier. The sensistivity and resolution of a thermal imager
133
134
Introduction to Camouflage & Deception
depend upon the size and number of detector elements. Sensitivity
increases with the total quantity of the detector material, whereas
the resolution is inversely proportional to the size of the detector
element. For greater sensitivity and resolution there should be a
large number of detector elements of small size.
The range performance of thermal imaging system is two to
three times more than that of the image intensifier. Further, targets
appear brighter in thermal imaging system than in image intensifier.
Thermal imagers have superior performance in operation a t night
a s weapon sights for armour and antiarmour weapons. The longer
range of thermal imagers is a n additional advantage.
5.10.5
Future Trends
Future developments in night vision technology will be the
application of multiple sensors in conjunction with computers.
These developments will lead to automatic target recognition
systems.
5.10.6
General Considerations Concerning IR Operations
with Thermal Imaging Systems
Peter Harrison44has brought out the general considerations
concerning IR operations:
(i) In the absence of solar heating a t night, the background cools
down. This gives rise to better thermal contrast between the
target and the background which helps in easier detection of
targets a t night;
(ii) Engine compartments and exhausts with their characteristic
hot spots can be clearly located in a thermal display;
(iii) Vehicles, owing to their movements and formation of tracks,
can be located and classified;
(iv) IR radiation can penetrate through smoke, dust and haze
better. In situations where target has hot spots, greater
detection ranges can be obtained;
Rain
and fog adversely affwt the performance of IR systems
(v)
because of attenuation. Further, water film formed on the target
suppresses its thermal profile;
(vi) Since thermal imagers are passive their presence cannot be
detected;
(vii) One important point to be kept in mind is the extinction
coefficient of the atmosphere. There is an exponential drop in
the strength of the signal as it passes through the atmoshpere.
Any enhancement of range can be accomplished only through
exponential increase in sensitivity of the s y ~ t e m ~ ~ - ~ ~ .
Infrared Camouflage
5.11
IMAGE PROCESSING
There are several methods of image processing some of which
are discussed below.
5.11.1
Single-element Scan
In the case of single-element scan, line by line scanning of the
focussed IR image is carried outlg. This gives rise to a n electrical
signal a t the single element detector. The amplified signal is
employed for driving a display, the scanning of which in
synchronisation with the detector element reproduces a n optical
counterpart of the thermal image. In order to get a steady image,
the image must be scanned a t least 25 times per sec. A single
element detector has a limited performance.
5.11.2
Multi-element scan
Multi-element scan eliminates many of the limitations of the
single element detectors. A s the number of elements is increased,
the sensitivity increases. The sensitivity also increases with the
detectivity of the individual detectors. Detector manufacturers
throughout the world are seeking to develop materials and
fabrication technologies to cope with the r e q ~ i r e r n e n t ~
In~multi.
element scan, the arrangement of elements is such that a cumulative
output is obtained by adding the output of the individual elements
(serial scan) or so that a simpler slower-speed scanning system
can be used (parallel scan), or a combination of the two is also
practical. Figure 5.9 shows serial scanning of a detector array
consisting of a row of 8 elements. The scanning mechanism can be
the same as that for a single element. In order to get a n output
signal equal to 8 times that of the single element, the 8 outputs are
combined together in phase. A light emitting diode (LED) or a
cathode ray tube [CRT] can be utilised for displaying the image.
Figure 5.9. Serial-scanning of eight element array.
5.1 1.3
Parallel-scan
In this there will be one
element for each line. The image
is scanned in one direction a s
shawn in Figure 5.10. Scanning
is done horizontally. The required
scanning speed i s therefore
slower. Figure 5.1 1 shows a
practical arrangement of parallel
--
+-
-
-
,
d
-"-----+
A
t---
1
1
.
--+-
------ b
+
-+
- ----
------A
C--Lt-----9
Figure 5.10. parallel-scan.
135
136
Introduction to Camouflage & Deception
scan. The oscillating mirror is silvered on both sides, one side of
which sweeps the infrared image on the row of detector elements.
The amplified signal from each detector element actuates a
corresponding LED. The second side of the mirror together with
the eyepiece forms a visual image. The image is displayed by a row
of LEDs.
I
1
Oscillat~ngmirror
Eye piece
i
-t-
+-'
I
$'
l
l
-+-1
,
Infrared
id~at~on
"
!
A n array of
LEDs
Figure 5.11. Parallel-scan with an oscillating mirror.
Serial-parallel scan
A matrix of 2-dimensional detector element arrays is shown
in Figure 5.12, with a serial-parallel scan of 8 image lines at a
time. Bringing out separate leads from each element to the signal
processing circuits is a practical barrier. It has the output amplitude
5.11.4
Infrared Camouflage
advantage of a serial scan with some of the speed and bandwidth
advantage of the parallel-scan.
Figure 5.12. Serial-parallel scan of eight image lines.
5.11.5
Focal-plane Processing Arrays (FPAs)
The serial scan has the drawback in that there is requirement
of multiple preamplifiers and delay lines in the signal processsing.
This drawback has been overcome in the SPRITE (Signal Processing
In The Element) detector invented at the Royal Signals and Radar
Establishment, Great Malvern, U.K. and developed a t MullardlY In
this device a single strip of Hg-Cd-Te having only three connections
serves the same purpose a s the complete conventional serial-scan
detectors. It utilises only one preamplifier and requires no external
delay lines. The signal accumulates within the element and is
integrated within the elements itself.
5.11.6
Staring Arrays
The SPRITE still suffers from the disadvantage in that it needs
mechanical scanning. This drawback is overcome in staring arrays.
Figure 5.13. Photomicrograph of the sensitive area of a staring array.
137
138
Introduction to Camouflage & Deception
The optics associated with staring arrays has a limited role. It
is restricted to focussing of the infrared image on to the array of
detector elements. Figure 5.13 shows a staring array. Scanning is
accomplished electronically by circuits integrated with the array.
The function of the associated optics is reduced merely to focusing
the infrared image on to the array of sensitive elements.
5. PI.%
Schottky Barrier FPAs
r
-
-
- -1
+
r:
-----
----
Focal plane
------
- --
Cold shield and stop
-
-----*--
--
f
-
-,
Dewar window
- -
-
+
- - - T
i
i
,,$
.
\
lfzround
Optics
I
1
-.
Source
-
--
- - -
A
I
Figure 5.14. Camera based on Schottky diode.
Source:
Reprinted with permission from Laser Focus World
A dramatic performance improvement can result45when one
can incorporate several tens of thousands of detector elements in
a n integrated focal plan array (FPA). One such device is the
platinum-silicide Schottky barrier FPA. Schottky barrier sensor works
similar to the visible TV ame era^^.^^. The focal plane array consists of
metallic Schottky electrodes. When illuminated by IR radiation, these
electrodes emit hot carriers. The resulting signal is utilised for giving
video output. This type of sensor can have a thermal resolution of
0.2 M. Schottky sensors do not have moving optics. The associated
electronics are less complex. They are low in cost and easy to
manufacture. A camera based on Schottky diode is shown in Fig.
5.14. Schottky barriet FPAs are followed by FPAs of indium
antimonide and mercury cadmium telluride doped with silicon.
Schottky barrier infrared charge coupled device (IRCCD).
CCDs basically consist of a large number of photosensitive
semiconductor elements-either photodiodes or photo-MOS
Infrared Camouflage
elements, - each of which is associated' a separate MOS capacitor
for storing the electric charge it produces, when incident photons
create electron-hole pairs. The charge-holding capacity of each MOS
capacitor is determined by the potential it is submitted to by an
associated network of closely spaced electrodes.
Staring imagers are the most mature FPA devices, in particular
the Schottky barrier FPA operating in 3-4.5 ym range23.The highest
performance FPAs are, however, the hybrid photovoltaic Hg-Cd-Te
FPAs in staring or non-staring configuration.
The technology of staring arrays will find applications in a
wide range of systems:
(i)
(ii)
Homing heads for precision guided munitions;
Terminally guided sub-munitions;
(iii) Light weight imagers; and
(iv)
Remote surveillance devices
Charge Transfer Device Focal Planes
5.11.8
Metal-Insulator-Semiconductor (MIS)detectors are especially
useful for focal plane applications when made with Hg-Cd-Te.
Several charge transfer devices based on Hg-Cd-Te, MIS integrated
technology have been developed for various applications. They
include charge injection devices (CIDs)and charge imaging matrix
arrays (CIMsj. Hg-Cd-Te CID staring arrays sensitive in the 8-10
pm range have been developed. The CIM consists of a 2-dimensional
array of MIS detectors that can be row-addressed using on-chip
MIS switch. The CIM is developed to overcome the limitations of
CCDs and C I D S ~ ~ .
IR SIGNATURES OF MILITARY OBJECTS AND
BACKGROUNDS
Variations in radiant emittance of a military object broadly
constitute its IR signature which is utilized by an IR sensing system
in performing its intended role. A military target has always
associated with it a background which has its own radiant emittance
characteristics. The infrared system must be able to discern the
target from its background. The most important military targets
whose IR signatures are utilized are aircraft, ship and tank. The
associated backgrounds a r e t h e sky, s e a a n d land,
together with atmosphere. The radiant emittance characteristics
of these are of relevance in the design and development of
countermeasures.
5.12
139
140
Introduction to Camouflage & Deception
5.12.1 IR Signature of Aircraft
Several mechanisms come into play that contribute to the
aircraft signature. The engine together with solar insolation from
outside are the chief sources of infrared radiation. The contribution
from the engine depends upon its type. Detailed information on
the radiation characteristics of aircraft engines is not available in
open literature. However, from the scant information available,
calculations on the thermal radiations from the aircraft engines
can be made. The two types of engines that are of interest aretheturbojet and the turbofan. The chief components of a turbojet
engine are given in Figure 5.15.
Compressor
Turbme
Afterburner
\
\\,
&
-
Flow diffuser
\
'
\
Combustion
chambers
-i
--
'\
EGT
I\
Exhaust
Talpipe
thermocouples
-
Figure 5.15. The turbojet engine.
Source:
Reprinted by permission of John Wiley & Sons Inc. from Infrared System
Engineering by Richard D. Hudson, (JR) Copyright O 1969 by John Wiley &
Sons. Inc.
Infrared Camouflage
The principal components of a turbojet engine are the
compressor, combustion chambers, turbine, exhaust nozzle and
tailpipe. A flow diffuser admits air into the engine from where it
enters the compressor. In the compressor, the air undergoes
compression from where it enters the combustion chamber. In the
combustion chamber, the compressed air gets mixed with fuel and
the mixture gets burnt. The products of combustion enter the
turbine, where power is extracted to run the compressor. Then the
gases undergo expansion to the ambient pressure through a nozzle
at the end of the tailpipe. The two chief sources of thermal radiation
to be considered are: (i)the tailpipe and (ii)the stream of hot gases
known a s plume. In general, the tailpipe is the major contributor
to thermal radiation. The source of heat for the tailpipe is exhaust
gases. From the time the gases leave the turbine till they reach the
exhaust nozzle, the temperature remains constant as shown in
Figure 5.15. The temperature of the gases a s they leave the turbine
is known a s the Exhaust Gas Temperature (EGT).The temperature
1
2
3
4
5
Wavelength (microns)
Figure 5.16. Infrared emission from Bunsen flame.
Source:
Reprinted by permission of John Wiley Sons Inc. from Infrared System
Engineering by Richard D. Hudson, [JR) Copyright 01969 by John Wiley &
Sons Inc.
141
142
Introduction to Camouflage & Deception
of the tailpipe wall may be taken a s equal to EGT, which may be of
the order of 700°C during takeoff over a long flight it can be of the
order of 500 - 600 "C, and a t lower speeds it may drop down to 350
- 400 "C. While making calculations on the thermal properties of a
turbo engine, it may be considered a s a grey body having an
emissivity of 0.9.
Next to the tailpipe it is the plume radiation which is
important. Carbon dioxide a n d water vapour are the chief
constituents of the plume. The spectral characteristics of plume
radiation are similar to those of Bunsen flame (Fig. 5.16). The
temperature of the plume gases at the nozzle is about 15 per cent
less than that of EGT. The exhaust gas temperatures of these
engines are in the order of 450-650°C. The exhaust gases leaving
the tailpipe have temperatures of the order of 350°C.
The overall signature of the aircraft comprises: i) radiation
from engine nozzle, ii) radiation from skin heated from the engine
from inside and solar insolation from outside, iii) top of aircraft
due to reflection of the cold sky, and iv) bottom of the aircraft
receiving heat from the ground.
The threat types and their corresponding spectral bands are
given in table 5.3.
Table 5.3. Aircraft threat types and spectral bands
Threat t.ype
-
-
Spectral bands (pm)
-
IR missile s e e k e r s
IR S e a r c h a n d t r a c k
FLIR
Source:
Reproduced from 'The Infrared a n d Electro-optical Systems Handbook, vol 7Countermeasure systems, edited by David. H. Pollock - Chapter 2-'Camouflage
suppression and screening systems' by David E. Schmieder with permission from the
publishers -ERIM and SPIE optical engineering press USA (1993)and the author.
The most intense spectral region for an aircraft is 3-5 pm. The
signature varies with the aspect angle or the direction from which
the aircraft is viewed47.Figure 5.17 gives the aircraft signature at
different aspect angles.
Infrared Camouflage
Figure 5.17.
Aircraft signatures at different angles.
Reproduced from 'The Infrared and Electro-optical Systems Handbook', vol 7Countermeasure systems, edited by David. H. Pollock - Chapter-'Camouflage
suppression and screening systems' by David E. Schmieder with permission from the
publishers -EMM and SPIE optical engineering press USA (1993)and the author.
Source:
Signature from the rear of the aircraft is prominent as the thermal
radiations are contributed by internal gases or heat. Plume
signature can be sensed from all aspect angles. The body of the
aircraft gets heated by solar radiation due to friction between air
molecules and surface. Hudson2arrived a t a relation for estimating
the skin temperature which is given by
5-25
T, = To (1+0.2 r M2)
where
To
r
=
=
=
M
=
=
=
T,
the ambient air temperature in K
the skin temperature in K
recovery factor (1.0 at stagnation point i.e. where
air stream comes to a complete rest)
0.87 for turbulent flow
0.82 for laminar flow
Mach number
I43
144
Introduction to Camouflage & Deception
5.12.2
IR Signature of a Ship
A ship has broadly two s i g n a t u r e ~ ~ ~ - ~in
~ -the
o nspectral
e
band
3-5 pm and the other in the spectral band 8-14 pm. The former is
used in missiles for homing on to the ship and the latter is used for
identifying the ship. The 3-5 pm band signature is provided by the
prime movers of propulsion, generation plants and the exhaust
gases of the diesel engines used in warship. These exhaust gases
are a t temperatures of the order of 200-300°C. The gas turbines
that are being used in warships have higher exhaust temperatures,
of the order of 500 "C. In general, the dominant sources of radiation
in the 3-5 pm band are the exhaust gases, plume and the funnel
which carries the exhaust gases.
The low temperature parts of the ship which are nearly a t the
ambient temperature provide the signature in the 8-14 pm. The
low temperature parts are primarily the hull and the superstructure.
A ship is detected against sea background or sea and sky
together. The contrast between the background and the ship enables
the detector to detect the ship. The background signature consists
of emission from sea and sky and reflected radiation from other
sources e.g. reflection of solar radiation from the sea surface or
clouds, or scattering by atmosphere. The contrast that is provided
between the background and the ship depends on the atmospheric
effects.
IR Signature of a Tank
The IR signature of a tank50 is formed by internal heating
together with external heating by sun during daytime. The internal
heating depends upon the operational status of the tank a s given
below:
(i) Vehicle stationary with engine running. The hull gets heated
around the engine compartment;
(ii) Vehicle on the move
5.12.3
A s the vehicle is on the move, the various parts of the hull get
heated more intensely. Also parts of the running gear - in particular
all rubber and rubberised components - get heated a s a result of
mechanical load caused by the motion. After a long drive the area
around the drive sprocket also gets heated. Further, the shock
absorbers in the running gear get heated up. Areas around the
turret engine compartment, and in particular, the exhaust gas and
the air outlets, get heated up. A s the tank fires the barrel of the
main gun the ground in front of the muzzle gets heated. Also, dust
and sand blown u p by hot muzzle flash provide IR signatures.
Further, after firing, the barrel of the machine gun and the main
gun provide IR signature. A large calibre tank produces IR signature
after 3-5 shots.
Infrared Camouflage
Solar insolation contributes to the IR signature due to external
heating. The parts that show u p are: (i)parts of low heat capacity
(thin plate, metal plates, etc.), and (ii) parts with low heat
conductivity (rubber or plastic parts). The following components
also provide the IR signature :- (i) pipe jackets, (ii)textile covering
along the gun opening in the mantlet, (iii) external stowage boxes
made of thin metal plate, (iv) rubber mudguards and rubber track
skirts, and v) rubber parts of the armour (if present).
A tank crew can also exert a partial influence on the IR
signature. The signature of a tank does not remain constant. The
signature keeps on changing a s the tank is in operation. The factors
on which the IR signature of a tank depends are many. The nature
of the terrain or the degree of ground consolidation also influence
the IR signature.
5.12.4
IR Signature of Personnel
The temperature of the exposed parts of the human body2
(skin) will be of the order of 32OC when the ambient indoor
temperature is 2 l o C. Under these conditions the radiant intensity
of a n average nude male assuming him to be a point target is 93.5
Wsr-l. At a distance of 1000 feet (300 m), if the atmospheric
absorption is ignored, the irradiance due to human body is
W.
~ m -About
~ . 32 per cent of this energy is emitted in 8-13 pm region
and 1 percent in the 3.2 - 4.8 pm region. The emissivity of human
skin is a s high as 0.99 at wavelengths longer than 4 pm and is
independent of the colour of the skin. In the presence of clothes
the radiant intensity a s well a s irradiance from human body will be
less because of the lower values of emissivity and temperature of
clothes.
5.12.5
IR Signature of Backgrounds
The backgrounds of interest are the sky, the sea and the earth.
Sun approximately radiates a s a black body a t temperature 6000
K. The sky radiance is approximately
times that of the sun".
This arises due to scattering of solar radiation. The maximum
radiance of the sky would occur a t 0.5 pm and would have a value
of about 3 ~ 1 0W
- ~cm-' pm-l sr-l. The atmospheric emission is
primarily from water vapour, carbon dioxide and ozone. If the
effective temperature of the atmosphere is taken in the range 200300 K, the maximum possible emission from the source is given by
the black body radiance for this temperature. The maximum
emission occurs at a wavelength of 10 pm and has a value of
- ~sr-'.
approximately 10-3W ~ mpm-I
Thermal Scenes Characterisation s f
5.12.6
Computer modelss1have been developed to describe a variety
of thermal scenes. A few have been experimentally verified. These
-
145
146
Introduction to Camouflage & Deception
models will be useful in the design of thermal imaging system as
well as countermeasures against infrared detection of military
objects.
The scenes consist of backgrounds and targets5'. Thermal
imaging systems utilise the two spectral bands 3-5 pm and 8- 14 pm
in which signals from the scenes are received. The primary scene
signal results from variations in radiant emittance from different
parts of the scene. These in turn are due to variations in temperature
and emissivity. The scene consisting of background and target (s)
receives heat from sun during day and loses heat during night.
How much the temperature of the object differs from the air
temperature depends upon atmospheric conditions - cloud cover,
humidity, wind etc. Objects with low emissivity have a tendency to
take on the temperature of the air with a lag determined by the
thermal mass and thermal conductivity of the object. In the case
of objects with high emissivity their temperatures are strongly
influenced by the physical characteristics of the scene objects and
the radiation characteristics of the sky and atmosphere, unlike
objects with low emissivity. Strong winds reduce substantially the
temperature excursions within a scene.
5.12.6.1 Backgrounds
Figure 5.18 shows five different background materials - sand,
grass, asphalt, trees and wood-and their temperature a s a function
of the time of the day.
Table 5.451 gives the conditions for the calculation of
temperature difference shown in the Fig. 5.18.
Table 5.4.
-
-
-
- - --
Ambient
temperature
Pressure
Declination
Visible Range
Mixing Ratio
Source:
Conditions for the calculation of temperature
difference
--
--
--
--
-
298 K
Cloud cover
0.6
1013 mbar
0 deg.
20 km
16
Latitude
Wind velocity
Range
-
20"N
20 kmph
4 km
-
NRL report 831 1, May 1979 Characterisation of Thermal Imaging Scene-The
Fundamenta,ls of Thermal Imaging Systems by Rosell F.A.
5.12.6.2 Scene objects
Some of the scene objects of interest51 are truck, tank, ship
etc. A truck when heated by nature appears very much like a truck
on a FLIR display. Metal parts which have high reflectivity appear
dark. When idling, the engine and exhaust become very hot,
exhibiting localized areas of radiation. If the truck is moving along
the road, again there is localized heating.
Infrared Camouflage
-
7
1
Wood
//
6
0
\\
Trees
2
4
10
12
AM
Time of day
6
8
PM
Figure 5.18. Temperature difference between various background
materials and air as a function of the time of the day.
NRL report 8 3 11, May 1979. Characterisation of Thermal Imaging Scene-The
Fundamentals of Thermal Imaging Systems by Rosell F.A..
Source:
/
\
1
Solar
Radiation
exchange
\
ii
+ ~
Direct
1
'
\
'_
"\Diffuse
r-+=
4
Convection
--- \
.
.-
Conduction
Figure 5.19. Factors which influence heating of a tank.
Source:
NRL report 831 1, May 1979 Characterisation of Thermal Imaging Scene-The
Fundamentals of Thermal Imaging Systems by Rosell F.A.
147
148
Introduction to Camouflage & Deception
Tanks, which are massive, generally lag behind the terrain in
temperature when parked. The engine and exhaust appear very
bright when the tank is running . When driven, the bogie wheels
and treads, as well as the rest of the tank get heated up, Figure 5.19
shows the various factors which influence the heating of a tank.
These are the insolation, the radiation exchange between the tank
and its surroundings, convection due to wind or tank motion,
internal heat sources such a s the engine, and conduction to the
earth.
I-
West
PM
AM
Time of day (hours)
Figure 5.20.
Effective radiant contrast between the tank and the grass
background as a function of the time of the day for various
viewing directions in the 8-12 pm spectral band.
Source:
NRL report 8311, May 1979 Characterisation of Thermal Imaging Scene-The
Fundamentals of Thermal Imaging Systems by Rosell F.A.
The signal obtainable from a scene object is a function of the
viewing aspect angle and therefore the signals will be time dependent
on even a very short-time basis when the sensor is moving. The
radiant contrast between the tank and the grass background is
shown in Fig. 5.20. The figure shows effective radiant contrast
between the tank and the grass background a s a function of time
of the day for various viewing directions in the 8-12 pm spectral
band. Figure 5.2 1 shows the thermal contrast of a ship against a
sea and a n air background a s a function of the time of the day.
RatchesS2 a n d Rodax et a153have discussed in detail the
characterisation of thermal scenes.
Infrared Camouflage
Ship
//-\
Air
Ship
n
.
\
Air
/
+
--------_----=-_-
= Z _
\ -..
< .
- - - - - __---------______
--
-
:1
-
.
Sea
., ...
_ . _ - - - . _--'-:-=-- --_---_
Time (hours)
Figure 5.21. Equivalent temperature of ship, the ambient air and the
sea in a semi-tropical and cold northern area vs time of
the day for a given set of operating conditions.
Source:
NRL report 8311, May 1979 Characterisation of Thermal Imaging Scene-The
Fundamentals of Thermal Imaging Systems by Rose11 F.A.
5.12.7
Computer Generated Imagery
Sheffer and Catheart54 have given an account of eomputirgenerated imagery. Synthetic Image Generation (SIG)finds several
applications in military, viz. i) for training, ii) system performance
evaluation, iii) algorithm development, and iv) mission planning.
To collect actual imagery is prohibitively costly. The advent of FLIR
initiated the IR synthetic image generation during 1960s.
149
150
Introductiofi to Camouflage & Deception
Generation of synthetic images in the visible region is
comparatively easier, whereas for the generation of imagery in the
infrared, the computational complexity is very high.
5.12.7.1 Components of synthetic scenes
Synthetic scenes for models of real scenes are 3-D computer
representations. All the components of a real scene need not be
incorporated in the synthetic scene. Only a relatively small number
of important features will be incorporated in the model. The various
components of the model are background, objects, atmosphere,
dynamic processes, and astronomical objects.
Backgrounds considered are terrestrial surfaces viz. terrain,
ocean, sky etc. SIC is of interest in detecting, tracking or recognizing
a target in its background. By background is meant all the scene
features except target. Objects which are natural such a s trees and
rocks, a s well a s man-made objects such a s buildings, vehicles
and targets are of interest.
Atmosphere includes phenomena such as clouds, fog, haze
and turbulence. Atmospheric modeling can be done by LOWTRANS5.
For any given set of atmospheric parameters, the model provides
transmission and solar scattering for given viewing paths.
Fire, smoke, explosions, dust, clouds and atmospheric
turbulence come under dynamic processes.
Astronomical objects include earth, sun and moon. The model
takes into account their effects on the scene. The sun is considered
a s a black body a t temperature 6000 K.
5.12.7.2 Paradigm for IR Synthetic Image Generation
Sheffer and Cat heart54 consider a s an example the scenario
of a n FLIR flying on a platform at a n altitude of 50 m and a range
of 3 km, and a rural area consisting of trees, shrubs, rocks, cattle
and various military vehicles placed in the terrain a t 1000 hrs. It
has rained the previous night. Sky is cloudy. There is light haze. It
is required to simulate the imagery generated by the FLIR. The
authors proposed a paradigm for IR synthetic image generation
consisting of the following major steps:
Step - 1 This step incorporates all the features of the scene in
terms of temperatures and radiances. This takes into
a c c o u n t the various factors t h a t influence the
temperature and radiance of each element of the scene.
These include self-emissions due to internal heat
sources, heat exchange witht the environment, and
absorbed and reflected solar radiation, and all the scene
interactions - background-to-object, object-tobackground and object-to-object.
Infrared Camouflage
Step - 2
In this step computer graphics algorithms are applied
for predicting the out put generated from Step-1. The
output of the Step-2 is not viewable image.
Step - 3 An ideal image is produced from the output of Step-2.
Step - 4 This s t e p t a k e s into a c c o u n t p a t h - d e p e n d a n t
atmospheric effects. The atmospheric attenuation on the
ideal image is calculated for the path between the scene
and the sensor.
Step - 5 In this Step, the physics of the electromagnetic scattering
and absorption in the atmosphere is considered for
computing the degraded image a t the sensor.
Step - 6 Next, the effects of the sensor on the image must be
accounted for. All IR image sensors introduce noise. In
order to accurately simulate these effects a sensor model
is needed which is based on the phenomenology of the
sensor. This requires precise information on circuitry
characteristics such a s Instantaneous Field of View
(IFOV), s c a n parameters, detector/preamplifier
parameters, spectral band pass and signal processing.
The output of the Step-6 is the predicted image which is
viewable. The electro~nagneticlaboratory of the Georgia Research
Institute under the sponsorship of US Army Missile Command
started this work. There are several software modules comprising
the total SIG package. The program is called GT VISIT. It is designed
to generate synthetic imagery in the spectral region 0.4 - 15 pm of
a 3-43 scene54.
IR SIGNATURE SUPPRESSION (IRSS) OF
5.13
WARSHIPS
Infrared signature supperssion is essential for warships.
Antiship missiles equipped with IR detecting systems can search,
track and identify warships. IR guidance systems fitted in missiles
can home on to the target passively. The ship under attack b e s
not receive any advance information. The examples of missiles which
are equipped with the above type of IR detecting systems are the
Hy-2A version of the SILKWORM, PENGUIN Norwegian version,
the AGM-I 19, the NATO's first IR guided missile and the SLAM new ship attack version of the H a r p ~ o n ~ ~ , ~ ~ .
In spite of the fact that there are several devices avalable today
for suppressing IR signatures of ships, it is not possible to reduce
the signature to such a n extent so a s to evade detection altogether,
because the IR detection technologies have greatly advanced. Today,
to detect an object with modern PR sensors a fraction of a degree
Celsius temperature difference is adequate58. However, once the
151
152
Introduction to Camouflage & Deception
signature(s)associated with the ship is suppressed, the attention
of the missile can be directed towards an IR decoy which becomes
a much stronger source of infrared radiation with the requisite
spectral characteristics. This enhances the chances of survivability
of the warships7.
A ship with a n untreated IR signature presents to a thermal
imager or IR seeker a s a n extended body of large area with
comparatively less brightness. Besides, there will be conspicuously
bright localised hot spots with an overall brightness contrast
significantly differing from the background.
Now we shall discuss the spectral characteristics of IR sources
of the ship in detail which are responsible for providing the thermal
contrast to the IR detector.
5.13.1 Spectral Characteristics of IR Signature(s)of Ships
A ship is a source of IR radiation emitting broadly in the
spectral bands 3-5 pm and 8-14 pm a s discussed earlier. Thesc
are also the bands which are transmitted by the atmospheric
constituents. The exhaust uptakes, the exhaust plumes and th:
hull and associated superstructure are the principal parts of thc
ship which contribute to the IR signatures. Now we shall consider
the relative importance of these sources in terms of radiance and
radiant intensity. We shall take a hypothetical case a s discussed
by Birk and DavisJ7.They have taken the areas of hull, plume and
visible uptake surfaces a s 1500 m2, 20 m2 and 5 m2 respectively.
These areas correspond to a side view of the ship. The background
temperature is 15°C and the hull is at a temperature 5°C above the
background. They have assumed the temperature of the uptake
surfaces and plume a s 400 "C, Table 5.5 summarises the data.
Table 5.5.
Source
Different sources of IR radiation on a ship and percentage
of total black body radiation from these sources, (assumed
background temperature = lS°C)
Temperature FC)
Assumed
area (m2)
% black body
radiation
3-5 pm
8-12pm 26
Hull
20
1500
1
Plume
400
20
4
Exhaust d u c t
400
5
28
Source:
19
Suppressing the Infrared Signatures of Marine Gas Turbines prcsentcd by Birk A X1
a n d Davis WR a t t h e Gas turbine and Aero-Engine Congress a n d Expositior..
June 5-9 1988. Amsterdam; reproduced with permission from ASME International.
New York, USA)
Infrared Camouflage
If these sources are assumed to radiate a s black bodies, a
certain percentage of the total radiation emitted will be in the two
principal spectral bands mentioned earlier.Table 5.6 gives the values
of radiance and radiant intensity of hull, plume and exhaust in the
two principal spectral bands.
Estimates of radiance and radiant intensity of principal
sources of a ship (a) without and (b) with the effects of
background (assumed background temperature = 15OC)
Table 5.6.
source
Radiance
W/sr/m2
3-5 m
Radiant intensity
W/sr
8-12 pm
('4
(a)
(b)
(a)
(b)
(a)
(b)
(a)
Hull
1.3
0.02
33
2.45
1950
30
49500
Plume
74
73
1480
1458
-
Exhaust
985
984
4925
4920
3340
Note :
For the plume radiation the percentage o f black body radiation is based
on the 4.3-4.55 pm waveband.
Source:
Suppressing the Infrared Signatures of Marine Gas Turbines presented by Birk
A.M. and Davis WR at the Gas turbine and Aero-Engine Congiess and Exposition,
J u n e 5-9 1988.Amsterdam; (reproduced with permission from ASME International,
New York, USA).
668
638
3675
3188
In the analysis given by the authors57the hull and the uptake
metal surfaces are assumed as grey bodies with a n emissivity of
0.95. The plume is assumed to have an emissivity of 0.5 and the
predominant wavelengths in the plume radiation are 4.3 ym and
4.55 pm the source of which is the selective radiation of carbon
dioxide present in the plume.
From the above table it is seen that the plume and the uptakes
are the highest radiance sources of a ship. A comparison of the
values in the table shows that the uptake has a radiance 760 times
that of the hull and 13 times that of the plume in the spectral
waveband 3-5 pm. A similar comparison in the 8- 12 pm wavelength
band shows that the radiance of the uptake is 20 times more than
that of the hull. The hull is the most dominant source in the 8- 12
pm band, but the effects of background have also to be taken into
consideration.
The large hull area compensates for its low radiance. In the 812 ym waveband, the hull is the most significant source in terms
of radiant intensity. But in the 3-5 ym waveband all these sources
are more or less equally important.
Broadly, the IR signature consists of two parts - an extended
source consisting of hull and super-structure with its spectral
characteristics lying principally in 8-12 pm waveband, and the
153
154
Introduction to Camouflage & Deception
exhaust duct and plume with their spectral characteristics
principally lying in the wavelength band 3-5 ym. The latter are the
hot spots. Quantitatively, 99% of the ship's signature is in 3-5 pm
band while 46% is in the 8-12 pm band; both of which can be
reduced by cooling plume and exhaust
The approximate percentages of the thermal radiation
characteristics of ship's sources are summarised in Table 5.7.
Table 5.7. Percentage contribution of different sources to overall ship
signature (background at 15°C)
- ----
Source
-
% contribution of sources to
total ship signature
3-5 pm
8-12pm
Hull
1
54
Plume
23
0
Exhaust duct
76
46
Source:
Suppressing the Infrared Signatures of Marine Gas Turbines presented by Birk
A.M. and Davis WR a t the Gas turbine and Aero-Engine Congress and Exposition,
June 5-9 1988. Amsterdam; with reproduced permission from ASME International.
New York, USA).
In a real situation the ship's signature, as mentioned earlier,
depends upon viewing angles, background conditions and many
other factors.
5.13.2
IR Signature Suppression
Infrared signature suppression have received considerable
attention a s a result of various conflicts around the world. Tribal
class Update and Modernisation Programme {TRUMP)and Canadian
Patrol Frigate (CPF) were the programmes of the Canadian Navy
for the development of IRSS devices5$.In order to adequately reduce
the IR signature of the ship to a safe value it is necessary to cool
the metal surfaces of the exhaust uptake to near-ambient
temperature, and similarly the temperature of the exhaust plume
must be brought down to a level where its radiation characteristics
are of the same order a s those of the cooled metal surfaces of the
exhaust uptakes. The two IRSS devices are: i) The DRES Ball, ii)
The Eductor Diffuser.
5.13.3
The DRES Ball
The Defence Research Establishment, Suffield (DRES),Canada
developed a device under the name DRES BALL
It suppresses
the IR signature of a ship a t all angles of view. It consists of an
outer duct that is film-cooled. The outer duct surrounds a
convectively film-cooled optical block centre body and a film-cooled
57p58.
Infrared Camouflage
diffuser. The role of the centre body is to optically block the view
down the exhaust uptake trunking i.e. it cuts off the direct line of
sight of the heated metal surface. All the metal surfaces are cooled
either convectively or by film cooling. The film-cooling layers get
mixed with the primary exhaust stream bringing down the
temperature of the plume. Air which is introduced into the centre
body through four hollow support struts cools the core of the
exhaust plume. Figure 5.22 gives the principal parts of the DRES
BALL IRSS device.
The Eductor Diffuser
5.13.4
This principally consists of a n ejector pump for entraining air
to cool the plume and a film-cooled diffuser to cool the metal
surfaces. This device has the drawback that it cannot suppress
the signature of the metal surfaces a t all viewing angles. It is
effective u p to viewing angles 70" above the horizontal of the metal
surfaces. Figure 5.23, shows the principal components of the
Eductor Diffuser.
Centrr
body
,
1
Exhaust
now
/
Figure 5.22. The Dres Ball.
Source :
Reproduced from International Defense Review, Mar. 1991, with permission, O
Interavia SA, Switzerland.
Effective IR signature suppression. Broadly, the two devices,
DRES BALL and Eductor Diffuser, bring down the IR signatures of
ships to a considerable limit.
155
156
Introduction to Camouflage & Deception
1
Mixing
length
'
hffuser
v
Exhaust
gases
Figure 5.23. The Eductor Diffuser.
Source :
Reproduced from International Defense Review, Mar. 1991, with permission @
Interavia SA Switzerland.
Besides these two devices, other types of IRSS incIude the
fan-assisted forced cooling system of the Japanese Maritime SelfDefence Force and the Pepper Pot and a fan-assisted Petal Nozzle
system of the UK Royal Navy.
There is another device known a s BLISS which is a Boundary
Layer Induced Stack Suppressor. This consists of a 4-nozzle eductor
accompanied by a mixing tube and entraining BLISS device for
metal surface cooling.
All these IRSS systems have significant impact on the ship
performance parameters such a s back pressure effects on the
engine, weight, centre of gravity effects and noise.
5.14
IR SIGNATURE SUPPRESSION OF AIRCRAFT
IR signature of aircraft has been discussed earlier. Here we
shall confine ourselves to the salient aspects of the signature from
Infrared Camouflage
the point of view of signature supression of turbofan engine. The IR
signature may be described in terms of the contributions made by
Fan
Figure 5.24. Turbofan Engine parts.
Source:
Reproduced from 'The Infrared and Electro-optical Systems Handbook', vol
7-Countermeasure systems, edited by David. H. Pollock - Chapter 2:
'Camouflage suppression and screening systems' by David E. Schmieder
with permission from the publishers -ERIM and SPIE optical engineering
press USA (1993)and the author.
the point of view of signature supression of turbofan engine. The
IR signature may be described in terms of the contributions made
by the plume and hot parts of the engine and the body of the aircraft.
The engine is the most important component of the aircraft which
contributes to the IR signature. Smoke and contrail also contribute
to the signature.
Of the various propulsion engines, the turbofan, the turbo-jet
and turbo-prop, the first one is the most widely used in military
aircraft. Figure 5.24, shows the turbo-fan engine parts47.There are
rotating fan blades in front of the compressor. In order to provide
direct thrust the fan air bypasses the compressor, burner and the
turbine sections. The bypass air can be expelled or ducted to the
rear of the engine. The ratio of the fan air mass bypassing the
compressor to the mass flowing through the compressor is a cycle
parameter and is called the bypass ratio. In order to accomplish
cooling of the hot parts the by pass air can be used.
5.14.1
Suppression of Plume Signature
In order to suppress the IR radiation of the plume the following
methods may be adopted:
i) Engine size reduction;
Plume radiation depends on the speed, pay-load requirements
and airframe size. In order to reduce the plume radiation these
parameters have to be reduced.
ii) Cycle tailoring.
157
158
Introduction to Camouflage & Deception
As mentioned earlier, it is the turbo-fan cycle which is used
in fighter and bomber aircraft. Let u s discuss here the cooling of
the turbo-fan cycle. The various parameters that a r e to be
considered are: (i) the internal design features, (ii) by pass ratio,
and (iii)equipping the engine with axisymmetric nozzle. By mixing
the exhaust gases with fan bypass air and further with the free
stream air in the ejector, cooling of the plume can be accomplished.
This cooling results in the suppression of the signature in the 3-5
pm wavelength band. By making use of a n airframe deck behind
the exhaust nozzle obscuration can be accomplished.
5.14.2
Suppression of the Signature of Hot Parts
The methods adopted for signature s u p p r e ~ s i o n
of~hot
~ engine
parts are: (i) obscuration, (ii) cooling, (iii) emissivity control, and
(iv) physical size reduction. These techniques are compatible with
the plume cooling methods. Unlike the plume the hot parts of the
aircraft are not visible a t all angles of view. Further, their view can
be obstructed by using a serpentine duct and also by the use of a
plug in exhaust nozzle. Although these measures obstruct the
viewing of the hot turbine section, they themselves must be cooled.
In order to cool these parts use is again made of turbine fan air,
inlet and compressor bleed air. Emissivity control must be carried
out keeping in view the location of the hot part. A s the emissivity is
reduced the reflectivity correspondingly increases. Ernissivity control
will be effective when employed in locations that reflect only
emissions from cooler surfaces into viewable regions. An optimum
combination of emissivity control and cooling would be appropriate.
Cooler parts can have higher emissivities.
5.14.3
Suppression of Signature of Aircraft Body
Aircraft body signature47can be observed over all aspect angles
and a t great distances. An aircraft body signature exhibits broad
intensity variations and spatial patterns. The degree of detail that
can be obtained is a function of range. At longer ranges it is not
possible to resolve details. At such distances only detection is possible
and the details get mixed u p with the background clutter. At long
distances what is important in camouflage is matching of the spatially
integrated radiance with the background radiance. However, at short
distances matching of the spatial characteristics with those of
background become important. In this context the resolution of the
threat sensor is of great importance. We may discuss the body
signature under two different conditions: - (i) resolved aircraft, and
(ii) unresolved aircraft. At close ranges, the external features of the
aircraft-shape, size, internal pattern, structure and silhouette - are
all resolved. These features mostly come under visible part of the
Infrared Camouflage
electromagnetic spectrum. In order to suppress these features, we
adopt methods of visual camouflage. In the infrared region, contrast
can be reduced by controlling emissivity with appropriate coatings
and with active heat transfer techniques.
Suppression o f Signature o f Unresolved Aircraft
5.14.4
When the various features of the aircraft are not resolved47,
what is important is to match the integrated spectral radiance of
the body of the aircraft a s a whole with the background radiance.
When the aircraft is operating a t high altitudes and also when the
skin of the aircraft body has low emissivity, the aircraft body reflects
the earth-shine very effectively. This excessive reflection of the
earth's shine which can be picked u p by uplooking sensors can be
reduced to a certain extent by shaping. Even then, at certain viewing
angles, it is not possible to reduce the sunshine in order to match
the IR body emissions to the cold background of a high altitude
sky. In such cases some form of cooling is necessary. When a n
aircraft is at lower altitude and sensors from above the aircraft are
looking down, the situation is different. The sensors see the aircraft
against a warm earth background. In this case the parts of the
aircraft which have high reflectivity can reflect the cold sky giving
rise to negative contrast against the ground. Under these conditions
adaptive colour techniques such a s the use of chromogenic surface
coatings may be effective.
There should be adequate matching of IR self-emissions with
solar irradiance and earth and sky reflections. Self-emissions
become strong at high subsonic and supersonic speeds. Low surface
emissivities can satisfy the requirement. But a t the same time the
corresponding high reflectivities create a problem arising out of
higher solar reflections. All these conflicting requirements may be
met by employing glossy planar surfaces.
In order to obtain zero contrast with the background, the
skin of the aircraft should have emissivity E, given by the relation47
where
background radiance.
radiance specularly reflected by the panel towards
the threat sensor.
LBB,= Planck black body radiance.
IR SIGNATURE SUPPRESSION OF TANK
5.15
IR signature of a tank has been already discussed earlier. A
tank which is well-camouflaged has a 50% increase in its survival
rate in the battlefield. Effective camouflage can increase fire power
and mobilitfjO.
Lo
=
L,
=
159
160
Introduction to Camouflage & Deception
The thermal signature of a tank may be minimised to a certain
extent at the design stage itself. In the majority of designs the engine
is kept a t the rear. The countermeasures for surveillance and
detection in the case of tanks may be divided into two classes6': i)
passive countermeasures, and ii) reactiv~countermeasures. Passive
countermeasures become ineffective when a tank is moving. By
reactive mode is meant measures taken in response to threats
observed or perceived by the crew of the tank.
5.15.1
Passive Countermeasures
In passive countermeasures parts of low emissivity are used.
When the adjacent patches in a disruptive pattern have different
emissivities, disruption of form takes place and IR silhouette effects
get reduced. The temperature difference between the tank and its
surroundings should not be more than about 2"-6°C. Although this
is not easy to achieve, since the temperature of the surroundings
within the scene can vary by more than 10°C,this variation renders
the thermal signature of the tank to blend with the background
clutter.
In the near IR region, the reflectance of cut-foliage markedly
differs from the live foliage. When viewed a t IR wavelengths the
cut- foliage covered vehicle tends to contrast with the surrounding
living trees. NIR camouflage was one of the first nonvisible
wavelengths to be addressed. Barracuda (Sweden) in 1957 had
introduced the first VisibleINIR camouflage net employing IR
reflective materials in the form of patches on the net60.
Thermal camouflage is achieved by reducing the apparent
temperature, size and emissivity of a heat source6]. In practical
terms it is almost impossible to eliminate the thermal signature of
a vehicle. But it is possible to reduce the signature to a level at
which it will cease to present a conspicuous hot spot in a thermal
viewer.
Exhausts present another problem, for these tend to be angled
outwards or upwards to reduce the amount of dust thrown u p and
can present a hot cloud above a vehicle. This can be countered to
some extent by mixing in air to cool the exhaust gases. Also, exhaust
gases will heat u p near-by vegetation or buildings and these will
create useful clues for intelligence purposes, sometimes long after
the location is vacated. In theory, shining metallic surfaces emit
less heat than matt or dark surfaces. Lighter paints reduce thermal
signature by reflecting solar radiation. U.S. tanks in Persian Gulf
were sprayed with the new Tan 686, a paint which reflects radiation
u p to 85%, reducing external surface temperature by lS°C, a s well
a s cooling the interior.
Infrared Camouflage
To date most modern multispectral camouflage has been aimed
at a combination of visible, near infrared and radar wavelengths.
The missing bands are covered by FIR. Combination of thermal
and radar camouflage is difficult to achieve since low emissivity
surfaces tend to provide good radar reflections, although Flectalon
metal foil thermal blanket provides a degree of attenuation through
scatter6'.
5.15.2
Reactive Countermeasures
When the vehicle is in motion it is easy to detect it by several
methods ranging from visual observation to Doppler radar. Gulf War
demonstrated6' the vulnerability of columns of moving vehicles to
surveillance by long range radar. We have to think of other methods
to reduce the chances of detection, such as decoys or smoke.
Smoke is one of the oidest methods61which can be deployed
either by individual vehicles when fired a t or on a large scale to
screen the movement of armoured units.
Smoke can be deployed61 by means of a vehicle-mounted
grenade launcher. Smoke on a large scale is now produced by the
traditional method of firing shells or rockets, and also by injecting
diesel fuel into exhausts of tank engines. The white smoke is effective
only against visual observation. This has led to the development of
multispectral screening smokes. Such systems can be based either
on a combination of absorption, scattering and reflection produced
by clouds, containing relatively large particles, or a cloud of IR
radiating material, the emission characteristics which provide
effective sceening in the IR a s well a s visible regions of the spectrum.
This can only be used in a reactive mode a s the number of such
smoke grenades that can be carried on a vehicle is limited. Smoke
grenades require a t least two seconds to begin to become effective,
which adds to the response time of the counter-measures based
on them. Neverthless, smoke grenade launchers remain a useful
item of armoured vehicle equipment and can be used not only to
deploy smoke but also some type of decoys. One type of decoy,
namely IR flare, is already offered a s a part of the Galix Combat
Vehicle Defence System produced by Etiemne, Lacroire, and can
be fired from the same type of launcher a s the smoke and other
munitions available with the system. The Galix IR flare has been
introduced to disturb the tracking of early types of SACLOS antitank
guided missiles with simple beacons. Flares of this type could also
be used to decoy housing missiles or sub-munitions with hot spot
sensors. Flare decoys are discussed in the chapter on deception.
Smokes have been upgraded to increase their thermal
signature and opacity, thus degrading the ability of IR sensors.
161
162
Introduction to Camouflage & Deception
5.16
SIGNATURE SUPPRESSION OF GROUND OBJECTS
In the case of ground equipment, in order to accomplish
reduction of contrast with the background in the infrared region,
we must consider the thermal profile of the object concerned and
its variation. This depends upon several properties of the object
viz. material, color, shade, and angle to the direction of insolation.
The profile also depends upon the nature of the background, viz.
soil, vegetation, other objects in the background, etc. The thermal
profile also varies from season to season, between day and night,
and during the day itself.
The US camouflage community during 1 9 8 0 arrived
~ ~ ~ a t the
conclusion that if the temperature variations in the object are within
4OC of its background, thermal matching can be accomplished
from the camouflage point of view.
5.16.1
Suppression o f Signature o f Non-hardware
By hiding objects inside shadows of other objects, the detection
probability can be reduced in all the bands47-visible, near infrared
a n d thermal infrared. This is because of reduction of the
corresponding contrast. Although this method cannot diminish the
thermal signature due to internal sources of heat, it reduces the
contribution from solar insolation. However, the signal strength
d u e to internal sources, s u c h a s h e a t exchanger, i n the
direction of threat sensor can be reduced by a proper orientation of
the object.
Natural materials such a s live foliage and cut foliage can also
be used a s a cover in order to suppress the thermal signature of
ground objects.
5.16.2
Thermal Camouflage Equipment and Materials
All ground equipment to a large extent are camouflaged by
disruptive pattern painting and screens such a s nets. Disruptive
patterns with appropriate reflectance characteristics will be effective
in the visible and near infrared regions. But these methods cannot
reduce the thermal signatures due to internal sources.
The various factors that contribute to the thermal signature
due to internal sources are the type of the engine driving the
equipment, its location and orientation in the equipment, the size
of the equipment, heat transfer properties of the component parts
etc. The designer of the equipment must keep all these factors in
mind while arriving a t a n overall low thermal signature.
Also, when the vehicle is on the move, the tracks formed by
the wheels can give rise to thermal signature. Ways and means to
reduce such signatures must be developed. As the tank's main
*
Infrared Camouflage
gun is fired, it gives rise to a characteristic signature. By proper
cooling of the barrel, this effect may reduced.
Wherever possible it would be better to incorporate signature
suppression measures a t the design stage itself. This has distinct
advantage in that the troops do not need any training7.
5.16.2.1 Disruptive patterns
When disruptive pattens are drawn with paints with their
reflectance properties matching with those of the background in
the visible and near infrared, they are effective against sensors
used in those regions.
5.16.2.2 Camouflage screens
The camouflage screens known a s camouflage nets are
employed all over the world for camouflaging all ground equipment.
The US Light-weight Camouflage Screen (LCSS) is one such net.
The nets are made in modules consisting of hexagonal-shaped or
diamond-shaped garnished screens. Depending on the size of the
object to be camouflaged, one or more modules can be used. Any
number of modules can be mated to form a big screen. A single
module can have a size varying from 10-100 m2 .
Here we shall discuss only thermal screening effect of these
nets. When a n object is covered with a screen, it partly cuts off
solar heating, so that the thermal signature due to solar heating is
partly reduced. A s far a s reducing the thermal signature due to
internal heating is concerned, it is not that effective because of its
significant open space. An object covered with a screen will present
a much larger area to a sensor, and, a s such, it becomes a much
bigger target when covered.
While camouflaging heat-producing equipment with a screen,
great care must be taken. The net must be erected in such a way
that the exhaust gases do not produce hot spots or raise the overall
temperature of the screen.
On the whole, with the help of the screens described above,
besides reducing detectability by sensors in the visible and near IR
region, solar loading and secondary heating effects due to exhaust
gases can be minimised.
Barracuda, Sweden has been working on the development of
camouflage nets with low thermal emissivity. By coating the nets
with paints of low thermal emissivity their temperature can brought
down. Such nets can merge into the clutter of the natural
background.
163
164
Introduction to Camouflage & ~ec&tion
5.1 6.2.3 Thermal blankets or tarps
The thermal signature of a vehicle having internal sources of
heat can either be suppressed or distorted by spreading the vehicle
with a cover known a s thermal blanket or tarp. Such a blanket
acts a s a thermal insulator which retards the transfer of heat from
internal heat sources to outside. US during 1970s worked on such
a blanket47.
The thermal blanket developed by Diab-Ban-acuda61(Sweden)
carr effectively screen the thermal signature of a tank when it is
covered with the blanket. It consists of a metallic film with a plastic
coating and a fabric backing and has a pattern of vent holes to allow
controlled escape of warm air. Over the thermal blanket a thermal
net is put to make the object blend with the background. It consists
of a metal foil between layers composed of a t least two polymeric
materials of different emissivities. In combination with paints,
CAMTEX texture mats developed in Denmark enhance the efficacy.
A Swedish company FFV has developed a device similar to
tliermal blanket. This consists of a paper bladder filled with a foam
material. When a n object with internal heat source is covered with
such a system it suppresses the thermal signature due to internal
heat sources.
Another device developed by a British company is a thermal
tarp. It has emissivity of 0.5 on either of its sides. When a n object
whose thermal signature is to be suppressed is covered with the,
trap the outer temperature will be brought down because of the
comparatively lower emissivity.
REFERENCES
1.
2.
3.
4.
5.
6.
Cott, H.B. Adaptive coloration in animals. Methuen & Co,
London 1966.
Hudson, R.D. Infrared system engineering. John Wiley & Sons,
New York, 1969.
Gopel, W.; Hesse, J . & Zemel J.N. (Ed)., Sensorscomprehensive survey-Optical Sensor. Vol 6, edited by
Wagner, E, Dandilkar, R. Spenner, K. V.C.H., Weinhkim, New
York, Bassel, Cambridge, 1992.
Spiro, I . J . & Schlessinger, M. Infrared technology
fundamentals. Marcel Dekker, Inc. New York and Basel. 1989.
Rocca, A. La & Zissis G.J. Field sources of black body radiation.
Rev. Sci. Instr. 1955 30, 200.
Simmons, F.S.; De Bell, A.G. & Anderson, Q.S., A 2000°C slitaperture black body source. Rev. Sci. Instr. 1961, 32, 1265.
Infrared Camouflage
Quinn, T.J., A practical black body cavity for the calibration
of radiation pyrometers. J. Sci. Instr. 1967, 44, 22 1.
Yamada, H.Y. A high-temperature black body radiation source
Appl. Opt. 1967, 6, 357.
Benarie, M.M. Optical pyrometry below red heat. J. Opt. Soc.
Am. 1957, 47, 1005.
Lalos, G.T.; Corruccini, R.J. & Broida H.P. Design and
construction of a black body and its use in the calibration of
a grating spectroradiometer. Rev. Sci. Instr. 1958, 29,505.
Jamieson, J.A. et al. Infrared physics and engineering. Mc
Graw Hill Book Co. Inc., New York, 1963.
Goodell, J.B. & Roberts, R.E. Atmospheric effects on infrared
systems. NRL Report, 83 11.
Mukherjee, R.N. Measurements of thermal infrared emissivity
using infrared thermometer. Technical Report, DMSRDE
(DRDO),Kanpur, India.
Lillesaeter, O. Simple radiometric method for measuring
thermal broadband emissivity of material samples; Appl. Opt.
1991, 30 (34), 5086-5089.
Clarke, F.J.J. & Larkin, J.A. Measurement of total reflectance,
transmittance and emissivity over the thermal IR spectrum.
Infrared Phys. 1985, 67 (1121, p. 359-67.
Wolfe, W.L. J. Opt. Soc. Am. 1974, 64, 546.
Wolfe, W.L., Appl. Opt., 1975, 14, 1937.
Accasto, M. Night vision systems. Defence Today/4-5
OPTRONIC.
Chiari, J.A. & Morton, F.D. Detectors for thermal imaging,
electronic components and applications. 1982 4, Technical
Publication, M-82-0099.
Dupuy T.N. (Ed-in-chief).Night vision technology application.
International Military and Defence Encyclopedia, 1993 4,
Brassey's (US),Inc. Washington, New York, p. 1953.
Lloyd, J.M. Thermal imaging systems. Plenum Press, New York
1975.
Hame, T.G. (Director) Precision guided munition seeker
technology. Technology Programme, General DynzEics
Pomona Division, Bomona, California, USA.
Smith, D.A. 8t Dennis, P.N.G. Future thermal imaging
technology. Defence Systems International, 1988, 1, 26 1-65.
Acchione , L.A. Electro-optics provide vital military capacity.
Signal, 1991, 92-94.
165
166
Introduction to Camouflage & Deception
Wormser, E.M. Properties of thermistor infrared detectors. J.
Opt. Soc. Am., 1953 43, p. 15.
Melman, I.M. & Meltzer, I.M. Status report on infrared
thermistor detectors. Proc. Natl. Electronics Conf, 1962,
p. 556.
Becker, J.A. Bolometric thermistor. 1947, US Patent No. 2,
414, 792.
Wormser E.M. & De Waard R.D. Construction for thermistor
bolometers. U.S. Patent No. 2,963, 1960, p. 674.
Wormser, E.M. Bolometer, 1961, US Patent No. 2, 983, 888.
Cooperstein, R. Method of forming a photosensitive layer of
lead sulphide crystals on a glass plate. January 8, 1962 US
Patent No. 3,O 18,236.
Johnson, T.H.; Cozine H.T. & McLean, B.N. Lead Selenide
detectors for ambient temperature operation. Appl. Opt., 1965,
4, 693.
McLean, B.N. Method of production of lead selenide
photodetector cells. August 22, 1961. US Patent No. 2,997,409.
Spencer, H.E. Chemically deposited lead selenide
photoconductive cells. February 1964, US Patent No 3,12 1,
022.
Morton, F.D. & King R.E.J. Photoconductive indium
antimonide detectors. Appl. Opt. 1965. 44, 659.
Van Duzer, T., IEEE J. Quantum Electron. 1989,25 (1I), 2365.
Rose, K. IEEE Trans. E.D., 1980, 2 7 (I), 118.
Bednorz, J. G. & Muller, K.A. 2. Phs., 1986, B-64, p- 189
Jones, R.C. Phenomenological description of response and
detecting ability of radiation detectors. Roc. Inst. Radio Engrs.
1959,47, 1495.
Baratte H.F. & King D. Night vision Tubes and solid state
device. Special Electronics, 1984, 3, 38-40.
Jagat Bhushan & Mehta, K.R. Night vision electro-optical
instruments. J. Instr. Society of India, 1973. 3 (2),p. 10-190.
Csorba, I.P., Current status and performance characteristics
of night vision aids. Proceedings of the International
Symposium on Optoelectronic Imaging, New Delhi, Dec 2-5,
1985, Chief Editor, Jugal, D.P., IRDE, Dehradun, Tata
McGraw Hill Publishing Co Ltd., New Delhi, 1985, p. 34-63.
Clarke, W. Photography by Infrared (2nd Ed.) Wiley, New York
1946.
Infrared Camouflage
Infrared and ultraviolet photography. Publication No. M3,
Eastman Kodak Co, Rohester, New York, 1961.
Harrison, P. Modern, weapon technology-thermal imaging and
its military applications. Barr & Stroud Ltd.
Mueffelmann, W. & Sato, I. Second generation technology
enhances military imaging. Laser Focus World, 1989, p. 109.
Ravich L.E. Thermal imaging rev. Laser Focus/Electro-optics,
1986, p. 99.
Schmieder, D.E. & Walker, G.W. Camouflage, suppression and
screening systems countermeasure systems. Edited by David
H. Pollock, Vol7, IR/EO Systems Handbook, ERIM and SPIE
Optical Engineering Press, Bellingham, Washington, USA,
1993.
lnfrared emission from ships. Technology, Naval Forces, 1991,
1 2 (4),p. 24-29.
Gates P.J . Infrared signature of warships. JNaval Engineering,
1990, 30 (I), p. 153-172.
Hilmes, R. A.F.V1sand thermal imagers. Military Technology,
1994, 10, p. 77-80.
Rosell, F.A. Characterisation of the thermal imaging scene the fundamentals of thermal imaging systems. NRL Report
831 1, May 197'9, p. 7-19.
Ratches, J.A. Performance model for thermal imaging systems
Optical Engineering, 1976, 15 (6).
Rodak, S.; Zege, F. & Stump, W., Thermal signature
measurements of four US Army field portable power generators
N.V. & E.O.L. Report, Aug 1975.
Sheffer, A.D. & Catheart, J . M. Computer generated IR
imagery; A first principle modelling approach. SPIC Vol 933,
Multispectral Image Processing and Enhancement, 1988,
p. 199-206.
Kneizys, F.X. et al. Atmospheric transmittance/ra$iance
computer code LOWTRAN-6, Airforce Geophysics Laboratory
1983, Report AFGL-TR-83-0 187.
Foxwell, D. Soviet navy reduces warship IR signatures.
International Defence Review, 1990, 23 (1I), p. 1213-17.
Birk, A.M. & Davis, W.R., Suppressingthe infrared signatures
of marine gas turbines. Presented at the Gas Turbine and
Aero-Engine Congress and Exposition, J u n e 5-9, 1988,
Amsterdam, The American Society of Mechanical Engineers
The Netherlands p. 1-10.
167
168
Introduction to Camouflage & Deception
58. Foxwell, D. Keeping cool at sea; canada leads the way in IR
suppression. International Defence Review, 1991, 3, p. 2505 1.
59. Lynch, T.G. Eliminating "Hot Spotsn, Canadian Naval
IR Suppression Systems. Navy International, 1992, 97 (5),
p. 119-23.
60. Hammick, M. The Invisible art of camouflage, International
Defence Review, 1992, 8, p. 749-54.
6 1. Ogorkiewiez, R.M.Countermeasures for tanks. International
Defence Review, 1989, 1,p. 53-57.
MICROWAVE CAMOUFLAGE
6.1
INTRODUCTION
Microwave camouflage deals with the various means that are
employed to defy detection of military objects by sensors responding
to the microwave region of the electromagnetic spectrum. As radar
is the chief sensor of microwave region, microwave camouflage is
actually referred to a s radar camouflage or radar countermeasures.
Microwave camouflage is the principal component of stealth
technology or low observable technology.
The role of radar in reconnaissance, surveillance and target
acquisition has greatly increased in the modern technology warfare
scenario. This, i n t u r n , h a s p u t a great s t r e s s on r a d a r
countermeasures. The major military objects which need microwave
camouflage cover are the fighter aircraft, the naval warship and the
tank, which are detected by their distinct microwave signatures.
The camouflage measures involve suppression of these signatures.
The microwave signature of a military object is known today as its
Radar Cross Section (RCS). Thus the problem of microwave
camouflage is one of reducing RCS of military objects such that the
object escapes detection by radar.Only those military objects which
come under the influence of radar threat are the candidates for
microwave camouflage.
This chapter deals with the basics of microwaves and their
generation, microwave sensors, broad categories of radars, role of
radar in war, RCS of military objects, its theoretical prediction for
objects of simple geometry, and methods for reducing RCS of military
objects.
6.2
WHAT ARE MICROWAVES 3
Microwaves are electromagnetic waves of frequencies ranging
from a few hundred Mega Hertz (MHz)to a few hundred Giga Hertz
(GHz). The prefix "micro" reflects neither the size of the wavelength
of these waves nor does it bear any relationship with the unit
"micrometer"; it merely indicates the smallness of these waves in
comparison with the wavelength of the radio waves'. However,
170
Introduction to Camouflage & Deception
microwaves are discussed separately from radio waves because sf
differences in their properties.
Although the limits of frequency of the microwave region are
open for debate, the microwave spectrum may be said to span the
frequency range 300 MHz - 300 GHz. Table 6.1 shows the
approximate ranges of wavelength, frequency, time period and photon
energy of the microwaves.
Table 6.1. Physical characteristics of microwaves
Wavelength
Frequency
Time period
3 ns - 3 ps
Energy (photon)
1.2 x 10-6eV - 1.2 x
1 m - 1 mm
300 MHz - 300 GHz
eV
Majority of microwave equipment available today utilize the
frequency range 1- 100 GHz.
6.2.1 Properties of Microwaves
Microwaves can be propagated through free space or through
waveguides, which are different from conventional transmission
lines. Unlike radio waves, which are either totally or partially
reflected, microwaves pass through the ionosphere. This property is
utilized in satellite communication and space transmission. Their
wide bandwidth is a distinct advantage in their application in
telecommunication a s information carrier. Unlike radiations in the
X-ray and ultraviolet regions, these radiations are incapable of
causing ionisation, as their photon energy is less than the energy
required to break molecular bonds. Microwaves are strongly absorbed
by water. This property finds application in microwave cooking. The
frequencies of stable atomic oscillators viz, those of hydrogen, cesium
and rubidium, lie in the microwave region, and as such atomic clocks
make use of these waves1. Absorption of microwave radiation by
matter a t resonant frequencies finds application in physical and
chemical analyses. Microwaves bear some resemblance to acoustic
waves in that their wavelength range (1 m - P mm) corresponds to
that of sound in air in the frequency range 300 Hz - 300 kHz2.
The microwave spectrum is broadly divided into three bands.
These are Ultra-High Frequency; 300 MHz to 3 GHz (UHF),SupraHigh Frequency; 3-30 GHz (SHF), and Extra-High Frequency
30-300 GHz (EHF). The microwave spectrum is sandwiched
between the radio frequency spectrum and the optical spectrum.
Figure 6.1 gives the physical characteristics of the microwave
spectrum.
Microwave Camouflage
6.2.2 Microwave Spectrum
300
MHz
ULTRA
HIGH
FREQUENCY
CC
5
I
I
3
GHz
&
CC
SUPRA
HIGH
FREQUENCY
U
EXTRA
HIGH
FREQUENCY
300
GHz
Figure 6.1.
The microwave frequency spectrum.
Source:
Reprinted with permission from Introduction to microwaves by Frede
Gardiol Artech House, Inc., Norwood, MA, USA http : //WWW.artechhouse.com.
All commercial microwave equipment, by and large, operate in
the frequency range 0.5-40 GHz. For example, microwave oven
operates a t a b o u t 2.2 GHz, microwave relay (telephone) a t
about 4.0 GHz, satellite television a t 4 GHz (downlink) and 6 GHz
(uplink) 3.
171
I72
Introduction to Camouflage & Deception
6.2.3 Radar Frequencies
Radar frequencies have no fixed limits. Any device that detects
and locates targets by transmitting electromagnetic radiation and
receiving the reflected radiation from the targets can be termed as
radar. In practice, most of the radars operate in the microwave region
of the electromagnetic spectrum. Table 6.2 gives the letter
designations old and new (NATO's) commonly used for radar
frequencies4.
Table 6.2. Letter designations for radar frequencies
Nomenclature
(old)
P
L
S
C
X
J(Ku)
K
Frequency
range (GHz)
0.225
1
2
4
8
12
18
Q (Ka)
27
V
40
60
20
60
O(E)
K
M
Source:
6.3
-
1
2
4
8
- 12
- 18
- 27
- 40
- 60
- 90
- 40
-100
-
Nomenclature
Frequency
(new)
range
(GHz)
A
u p to
0.25
B
C
D
E
F
G
H
I
J
L
0.25
0.5
1
2
3
4
6
8
10
40
-
-
-
-
0.5
1
2
3
4
6
18
10
20
60
With permission from RADAR by P.S. Hall, T. K. Garland-collins, R. S. Picton
and R. G. Lee. Brassey's, London, O 1991, Brassey's (UK) Ltd. London.
HISTORICAL DEVELOPMENT OF MICROWAVES
The origin of the development1 of the microwave region of the
electromagnetic spectrum may be traced back to the pioneering work
carried out by Heinrich Hertz (1888) and Marconi (1890) on spark
generators whose frequencies entered the microwave region. Hertz
extended the frequency to 500 MHz in 1894 before his death. Sir
Olive Lodge in 1894 continued the work on spark generators. A
metal tube surrounding the spark generator was found to radiate a
signal having directional properties. George Southworth (1920-30)
a t the Bell Telephone Laboratories in U S was the first to use
microwaves for the transmission of information. Sir Robert WattsonWatt in 1930 demonstrated the principle of radar by producing an
electromagnetic echo from a n object. World War I1 saw the
development and fabrication of radar, employing microwaves, mostly
in US.
The branch of microwave electronics, in particular, generation
of microwaves, started growing first with the development of the
magnetron in 1920, the klystron in 1935, subsequently the Backward
Wave Oscillator (BWO) and the Travelling Wave Tube (TWT).Then
Microwave Camouflage
appeared the solid state device - the Gunn Diode in 1962. During
1970s transistors were utilised and then microwave printed circuits.
The development of radar is synonymous with developments in
microwave electronics.
6.4
GENERATION OF MICROWAVES
In contrast with the conventional electronics a t the lower radio
frequencies, microwave electronics features special characteristics,
in particular the associated short wavelengths, which are of the
same order of magnitude a s those of the circuit components and
devices employed.
As the frequency is raised to a point where the wavelength
becomes comparable to circuit dimensions, transmission delays
cannot be ignored. There will be relative increase in the impedance
of the connecting leads, terminals, etc, and the effects of distributed
inductance and capacitance between leads cannot be neglected.
Further, currents circulating in unshielded circuits which are
comparable in size with a wavelength start radiating. Thus the
conventional low frequency circuit elements do not work a t these
frequencies.
The open wire transmission lines used for energy transfer a t
lower frequencies become lossy due to radiation of energy at the
microwave frequencies. Even the coaxial line cannot be effective
due to increased dielectric and conductor losses. Thus in the
microwave region hollow metallic pipes known as "waveguides" are
employed for energy transmission in place of conventional
transmission lines.
The vacuum tube and solid state electron devices used a t lower
frequencies also do not work in the microwave region. Their
performance is mainly limited by the electron transit time, interelectrodeljunction capacitances and lead inductancer;.
The generation and handling of microwaves acquired great
importance during World War-I1 and afterwards because of the
necessity for narrow beam antennas required by the high resolution
radar. Since then rapid developments have taken place in the field
of microwaves-generation, transmission and detection.
6.4.1 Microwave Vacuum Tube Devices
The basic difference between the conventional vacuum tube
devices and the microwave vacuum tube devices is that the resonator
system (tank circuit) in the latter is a n integral part of the electrode
structure. Further, the electron transit time (time taken by a n
electron to travel from one electrode to another), the main factor
which limits the performance of conventional devices a t high
frequencies, is made use of in the working of microwave tubes.
173
174
Introduction to Camouflage& Deception
Though the mechanism of operation of various microwave
oscillators and amplifiers differs in detail, the common factor in all
the tubes is the transfer of power from a source of direct voltage to
a source of alternating voltage by means of a density modulated
stream of electrons. In fact, velocity modulation of electrons is
converted into density modulation of electron beam, using electron
transit times which are not negligible compared to periods of
oscillation. The density modulation of the electron beam results in
a net delivery of energy from the electrons to the electric field during
the interaction between the two.
If the interaction between electrons and R.F. electric field takes
place in the relatively short gap between two electrodes, it is referred
to a s "localised interaction". On the other hand, if the interaction
takes place between the electrons and electric fields moving
approximately with the same velocity over a relatively large distance,
it is referred to as "extended interaction".
Microwave tubes like Two Cavity Klystron and Reflex Klystron
employ "localised interaction", whereas it is of "extended" type in
Travelling Wave Tube (TWT) amplifier, Backward Wave Oscillator
(BWO), Magnetron and Crossed Field Amplifier (CFA).
A comparison of these tubes (typical values) is given in
Table 6.3.
Table 6.3. Comparison of microwave vacuum tube devices
D e w
Frequency
Power
range, (Gw output
Multicavity
Klystron
Amplifier
upto 70
500 KW (CW)
30MW (Peak)
at 10 GHz
Reflex
Klystron
Oscillator
upto 25
10-500 MW (CW)
upto 20
Travelling
Wave Tube
Amplifier (TWT)
lOkw (CW)
Backward
upto 100
Wave Oscillator
IBWOI
100 W at 300 MHz
A few mw at
100 GHz
Magnetron
Oscillator
upto 70
800 kw (CW)
40 MW beak)
at 10 GHz
Crossed
Field Amplifier
(CFA)
upto 10
6 MW (Peak)
Gain
Bandwidth
Effiency
1-8%
- 40%
dB
30-50
-
30%
20-30%
(Mechanical)
30-40
Octave
20-40%
-
Octave
10-20%
Narrow
> 50%
25%
- 50%
30-40
Microwave Camouflage
6.4.2 Applications of Microwave Tubes
Klystron amplijier
It is used in UHF TV transmitters (CW), long range radar
(pulsed),troposcatter links (CW),and earth station transmitters (CW).
Reflex Klystron Oscillator
It is used a s signal source in microwave generators, local
oscillator in microwave receivers, FM oscillator in portable microwave
links and pump oscillator for parametric amplifiers.
TWTAmpliJier
It is used in microwave receivers, wide band ground and satellite
communication systems, anti-jamming and countermeasures.
BWO
It is used a s a signal source in sweep oscillators and as a wide
band noise source for countermeasures.
Magnetron
It is used a s radar transmitter (pulsed),in microwave cooking,
telemetry and missile applications.
Crossed Field AmpliJier
It is used in radar and electronic countermeasures.
6.4.3 Microwave Solid State Devices
Research work during the past three decades has resulted in
the use of semiconductor devices for applications like microwave
generation, amplification, detection, switching and frequency
modulation.
Microwave solid state devices may be classified a s follows:
(i) Based on thejunction properties
Microwave bipolar transistors
Microwave field effect transistors
Microwave tunnel diodes
(ii) Based on the bulk effectof semiconductor
Transferred electron devices - TEDs
Gunn diode
Limited space charge accumulation diode ILSA)
Indium phosphide diode (InP)
Cadmium telluride diode (CdTe)
(iii) Based on avalanche effect of the semiconductor
Impact ionisation avalanche transit time (IMPATT)diode
Trapped plasma avalanche triggered transit time
175
176
Introduction to Camouflage & Deception
(TRAPATT)diode
Barrier injected transit time (BARITT)Diode
(iv) Based on quantum electronics (Stimulated emission of
radiation)
Ruby lasers
Semiconductor lasers
In general, solid state sources produce much smaller powers
(tens of milliwatts to a few watts) a s compared to vacuum tube
devices. However, with the solid state devices it is possible to reach
frequencies exceeding 100 GHz, entering into rnillimetre wave region.
Further, amplifiers with low noise figures like GaAs FET amplifiers
can be advantageously used in the receivers. Also, these devices
require low operating voltages and are suitable for portable groundbased radars requiring short ranges. These are also suitable for
integrating the source with radiating elements in phased array
radars.
6.5
MICROWAVE SENSORS
Microwave sensors may be broadly discussed under two classes,
active and passive, radar belonging to the former and radiometry to
the latter. Radar is the primary long range sensor for surveillance
and target acquisition in the air, on land, on the sea and in space.
An active sensor illuminates the target and utilises the characteristics
of the reflected signal to get the required information. A passive
sensor such a s a microwave radiometer depends for its action on
the natural radiation emitted by the target by virtue of its
temperature. Microwave radiometry, unlike infrared radiometry, is
yet to find application in defence. The principal limitation of
microwave radiometry is the low intensity of radiation emitted by
terrestrial objects. Advances in microwave radiometry depend
primarily upon the improvement of the sensitivity of the radiometer.
6.5.1 Principle of Radar
The word radar is a n acronym for Radio Detection And Ranging.
Broadly, it deals with the process of detection of radio objects and
finding their distances (ranging). The basic principle behind the
operation is the fact that electromagnetic waves get reflected
whenever there is a change in the properties of the medium. The
properties involved are the conductivity, the permittivity and the
permeability. Radar sends a burst of electromagnetic energy and
records the reflected signal (the echo) from the targeW.
If T is the time interval between the instant of transmission of
the electromagnetic pulse and the instant of the reception of the
Microwave Camouflage
echo and c is the velocity of propagation of electromagnetic waves,
then the distance or the range of the target, R is given by :
R = cT/2
6-1
R(km)=O.lST
6-2
where T is in microseconds
For 1 ps the distance is 150 m. The principle shown in figure
6.27 is almost as old7 as the subject of electromagnetic radiation
itself, but the development of conventional radar in its present use
took place during World War 11.
Radar
+.
Tareet
Transmitted S~gnal
Echo Signal
Figure 6.2. Badc principle of radar.
6.5.2 Historical development of radar
Radar development has a long
Maxwell, in 1873,
theoretically showed that electromagneticwaves could be propagated
through the atmosphere. Hertz in 1887 practically demonstrated it.
Then Tesla in 1900 put forth the concept of the reflection of
electromagnetic waves from a n object. Hulsmeyer, in 1904, made a
practical radar. He generated electromagnetic waves with the help
of a spark gap and focused them with a parabolic reflector antenna.
An echo was picked u p by another parabolic reflector. This simple
radar was used on two ships for avoiding collision between them.
Even range could be calculated from the angle of the parabolic
antenna and its height above water.
During the period 1904 to 1935 several countries in the world
were engaged in the development of radar. A need for extending the
performance of the human eye for military application for target
detection was felt for the first time in 1917 when cities in England
were attacked by German aircraft. Thus, air defence became the
primary impetus for subsequent developments in the field of radar
technology. Taylor and Young in the United States, and Alder in
England, contributed to the technology. Hyland working at the Naval
Research Laboratory in United States was the first to show that an
aircraft could be detected by a radar. A pulsed radar was built by
1935 which had a range of 40 km. The experiment conducted at
Daventry in 1935 by Wattson-Watt and Wilkins with a transmitter
operating at 6 MHz and a separate receiver (located a little away
from the transmitter) detected a flying aircraft. In the Battle of Britain
177
178
Introduction to Camouflage & Deception
in 1940, a radar having a range of about 65 km was used against
bomber aircraft. Radars were simultaneously developed in Germany
and Britain. The invention of the magnetron in 1940 with pulse
powers of the order of many kilowatts greatly increased the radar
range and capability. During World War I1 several developments
took place in radar technology. Post-war developments such as digital
signal processing, and phased array antenna have revolutionised
radar capabilities. Further, in the years to come, developments in
modern electronic technology such as Very High Speed Integrated
Circuits (VHSIC)will find their application in digital signal processing
in radar.
6.5.3 Radar Equation
The radar equation gives the power reflected back by the target
in terms of the transmitted power and the distance of the target
from the transmitter. From the radar equation the maximum range
of the radar can also be deduced. The mathematical treatment of
the radar equation a s given by Cheung and Levien3is dealt with in
Appendix B'.
6.5.4 A Typical Radar
amplifier
I
A
DISPLAY
-1
Transmitter
1 <--I
1
Pulse
Modulator
Figure 6.3.
Block diagram of a typical radar system.
Source:
Reprinted with permission from microwaves made simple : principles and
applications (ed) W. Stephen Cheung and Frederic H. Levien, Chapter 14,
Radar Systems by frederic H Levien. Artech House Inc., Norwood, MA. USA
http : //www.artech-house.com.
The block diagram of a typical radar is given in Fig 6.3. It
consists of a transmitter which generates and amplifies the
microwave signal a t radar frequencies, a duplexer which sends the
radar power from the transmitter to the antenna, and a pulse
modulator which acts a s on and off switch for the transmitter,
causing pulses of radar power to radiate from the antenna3. On the
receiver side it has a low noise RF amplifier which amplifies the
Microwave Camouflage
weak echo signal from the target, a mixer (a local oscillator which
converts the microwave signal to a signal of a more convenient lower
frequency), a n IF amplifier which amplifies the converted signal,
second detector which eliminates the intermediate frequency
(convertedvalue) leaving the base band information, a video amplifier
which amplifies the base band signal and a display which displays
the received radar echo signal in visual form for interpretation by
the operator.
6.5.5 Types of Radars
The following types of radars will be briefly d e s ~ r i b e d ~ . ~ .
i) Continuous wave (CW)radar
ii) Frequency modulated continuous wave (FM-CW)radar
iii) Pulse doppler radar and moving target indicator
(MTI)
iv) Tracking radar
v) Side looking air-borne radar (SLAR)and
vi) Synthetic aperture radar (SAR)
6.5.6 Continuous Wave (CW)Radar
A radar transmitter in its usual concept sends pulses of
electromagnetic energy, but it can also transmit waves continuously
towards a moving target and measure the Doppler shift for
determining the relative velocity between the target and the radar.
This is the principle of the CW radar6.
Iff, is the frequency of the transmitted signal, then the frequency
of the signal reflected back from the moving target (toward or away)
is Cf, *fJ where fd is known as the Doppler shift.
fd = 0.666 vf0,
HZ
6-3
where vr is in km and fo in MHz. The relative velocity vr may be
written as v,=v cose where v is the speed of the target and 8 is the
angle between the line joining the radar and the target and the
trajectory of the target. If the target is moving about the radar in a
circular trajectory, f, = 0 . As the operating frequency of the radar
transmitter increases, the Doppler shift increases. Figure 6.4 (a)
shows the block diagram of CW radar and 6.4 (b)gives the frequency
response of the beat frequency amplifier. The signal fo +fd is mixed
with f, to produce a Doppler beat note of frequency f,. The sign of
therDoppler shift is lost in the process? The amplifier eliminates
echoes from stationary targets and amplifies the echo signal
sufficiently to operate the display (indicator).The indicator may be
an earphone or a frequency meter.
179
180
Introduction to Camouflage & Deception
fo
<---
----
<
fo
CW
Transmitter
..---fo
*
fo
P
fd
1
.-
Frequency
Figure 6.4.
(a)Block diagram of a CW radar.
(b)Response characteristics of a beat frequency
amplifier.
Source:
Reproduced with permission from McGraw-Hill Companies Ltd. Introduction
to Radar Systems by M.I.Skolnik.
The major drawback of CW radar is that it cannot measure
range. But there are many applications such as traffic police radar
where only vehicle speed is required, or intrusion alarm to detect
movement of intruders. It can be applied for the measurement of
velocitgr of missiles.
6.5.7 Frequency Modulated Continuous Wave (FM-CW)Radar
In order to measure range some sort of timing mark has to be
applied to a CW radar (carrier). One way is to frequency-modulate
Microwave Camouflage
the carrier6. Let the transmitter frequency be changed a s a function
of time linearly. Figure 6.5(a) shows linear frequency modulation.
In the presence of a target at a distance R the echo signal
comes back after a time T=2R/c.Dashed line corresponds to the
echo signal. When the echo signal is heterodyned with a portion of
the transmitter signal in a non-linear element, such a s a diode, a
beat note& will be produced. In the absence of a Doppler frequency
shift the beat note &represents a measure of target's range and fb=
f, where fr is the beat frequency due to-the target's range. If the
carrier frequency has a rate of change f, the beat frequency
In any practical situation, it is not possible to change the
frequency continuously in one direction only. There is a need for
periodicity in modulation. The type of modulation can be triangular
or sawtooth or sinusoidal or some other form. If we use the triangular
frequency modulation (Fig 6.5(b))a t a rate off, over a range of
Af the beat frequency a
The resulting beat frequency vs time is shown in figure 6.5(c).
Thus, from the measurement of beat frequency, the range R
can be determined. Figure 6.6 shows the block diagram of a fi-equency
modulated-continuous wave radar6.
In order to produce beat frequency a portion of the transmitter
signal is used as reference. The beat frequency is amplified and
measured with a counter calibrated in distance.
If the target is in motion, a Doppler shift comes into play
superimposed on the FM range beat note. The Doppler shift changes
the frequency-time plot of the echo signal to be shifted u p or down.
The beat frequency is increased by the Doppler shift in one portion
of cycle and decreased in the other portion (Fig. 6.7)
If we consider the case when the target is approaching, the
corresponding beat frequency will be the difference between the beat
frequency due to the range frequency f,and the Doppler frequency
shift fd.
fb (UP)=fr -fd
6-6
likewise
fb
(down) =f, + f d
6-7
18 1
182
Introduction to Camouflage & Deception
Figure 6.5.
Frequency time relationships in FM-CWradar. Solid curve
gives the transmitted signal : dashed curve the echo (a)
linear frequency mo.dulation (b) triangular frequency
modulation (c) beat frequency of (b).
Source:
Reproduced with permission from McGraw-Hill. Introduction to Radar Systems
by M.I. Skolnik.
Microwave Camouflage
The range frequency f, may be obtained by measuring the
average beat frequency.
1
=-
6-8
[fb(~+
~ f)d d o w n ) ]
2
=f,
Iff, (up) and f, (down) are measured individually, one half the
difference between the two frequencies will give the Doppler frequency
(V fr=-fd)
Transmithng
antenna
Receiving
antenna
Reference signal
,
counter
,
Figure 6.6.
Block diagram of a FM-CWradar.
Source:
Reproduced with permission from McGraw-Hill. Introduction to Radar Systems
by M.I. Skolnik.
I f f , < f, the roles of the averaging and difference frequency
measurements are reversed. When there is more than one target,
the mixer output will have more than one difference frequency. If
the system is linear corresponding to each target there will be a
frequency component. By employing narrow band filters the different
frequency components can be separated and in principle the range
to each target can be determined. If the frequency modulated
waveform is non-linear, the situation is more complicated. The main
application of FM-CW radar is aircraft altimeter.
6.5.8 Pulse Doppler Radar and Moving Target Indicator (MTI)
A pulse Doppler radar or MTI is a system that utilises Doppler
frequency shift-for discriminating moving targets from fixed targets.
Although there are some differences between the two, the basic
principle is the same. MTI radar h a s unambiguous range
measurement with ambiguous Doppler measurements, whereas the
situation is vice versa with pulse Doppler radar. A continuous wave
radar may in principle be converted into a pulse radar by
183
184
Introduction to Camouflage & Deception
Ii--------_-.___.- Transmitted signal
Time
Figure 6.7.
Source:
----->
Frequency time relationships in FM-CWradar-increase
in Doppler shift in one portion of cycle and decrease in
the other portion.
(a) Solid curve transmitted signal and dashed curve the
received signal and (b) Beat frequency.
Reproduced with permission from McGraw-Hill. Introduction to Radar Systems
by M.I. Skolnik.
incorporating a power amplifier and a modulator to turn the amplifier
on and off for generating pulses. In order to take the place of the
local oscillator, a small portion of the CW oscillator power is diverted
to the receiver. This functions as the coherent reference in order to
detect the Doppler frequency shift. By coherent it is meant that the
phase of the transmitted signal is maintained in the reference signal.
This reference signal is the characteristic feature of the coherent
MTI radar. Figure 6.8 shows pulse Doppler radar.
Microwave Camouflage
1
\
/ji
/
1
Pulse
modulator
I
- -
-CW
oscillator
Power
amplfier
4I
f,
Reference signal
-
-
Figure 6.8.
Pulse radar using Doppler information.
Source:
Reproduced with permission from McGraw-Hill Introduction to Radar Systems
by M.I. Skolnik.
Let the voltage of CW oscillator be
A, sin 2 4 t
and that of the reference signal be
Ve = A2sin2zf;t
The Doppler-shifted echo signal voltage is
V,,
i
= A3 sin 2n-(f,
I
+ f d )t - -
4rift
C R"
where A, is the amplitude of the signal received from a target
at range Roand f,the Doppler frequency shift. The reference signal
and the Doppler-shifted echo signal are heterodyned in the mixer
stage of the receiver. The low frequency component of the mixer is
of concern and the voltage difference is given by
These equations represent sine wave carriers. Pulse modulation
is imposed on these wave carriers. In the case of stationary objects
185
286
Introduction to Camouflage & Deception
the Doppler frequency shift& will be zero. Hence Vd8does not vary
with time and takes a constant value lying anywhere between +A,
to -A, including zero. In the case of a moving target f, ;t 0 and the
voltage corresponding to the difference frequency from the mixer
will be a function of time (Fig 6.9a).
(i) When f d > ;,1 the Doppler signal can be readily identified from
the information contained in a single pulse. (Figure 6.9(b))
1
(ii) When fd < ,; the pulses will be modulated with an amplitude
given by the equation above and many pulses will be needed to
1
extract the Doppler information. Situation of the kind fd < ,; is
encountered in the case of aircraft detection radar, whereas f, > ',
is applicable to the situation where the primary function of the
radar is the detection of extra-terrestrial targets such as ballistic
missiles and satellites. (Fig 6.9(c))
(4
Figure 6.9.
a) FW echo pulse train.
bj Video pulse train for Doppler frequency
fd
>
1
-.
r
1
c) Video pulse train for Doppler frequency fd < 7.
Source:
Reproduced with permission from McGraw-Hill. Introduction to Radar Systems
by M.I. Skolnik.
From an A-scope display of video output, we can distinguish
moving targets from stationary targets (Fig 6.10). Figure 6.10(a)
shows the appearance of a single sweep. The two arrows point out
two moving targets among several stationary targets. It is, however,
not possible to distinguish moving targets from stationary targets
with the help of a single sweep. As shown in Figures 6.1O(a)to (e)
depicting successive sweeps in A-scope display, the amplitude of
Microwave Camouflage
moving targets varies from sweep to sweep, whereas it is not so in
the case of' stationary objects.
Targets in motion give rise to what is known as "butterfly effect"
as shown in figure 6.10(f). This effect can be utilised for recognition
of moving targets on a n A-scope display.
Figure 6.10. Succeessive sweeps of an MTI radar A-Scope display; echo
amplitude as a function of time; arrows indicate position
gf moving targets.
Source:
Reproduced with permission from McGraw-Hill Introduction to Radar Systems
by M.I. Skolnik.
6.5.9 Tracking Radar
A tracking radar can measure the coordinates of a target and
give data which can be used to determine target path and predict its
subsequent positions6. The information it provides includes data on
187
188
Introduction to Camouflage & Deception
range, elevation angle, azimuth angle and Doppler shift, or any
combination of these. Although it may appear like any other radar,
it differs in the method by which tracking is accomplished. A
continuous tracking radar provides continuous tracking data on a
particular target. The track-while-scan radar provides sampled data
on one or more targets while maintaining search for other targets.
The continuous tracking radar employs a servo-mechanism actuated
by an error signal in order to position antenna beam in angle. The
methods used for generating the error signal are: (i)sequential lobing,
(ii) conical scan, an,d (iii) simultaneous lobing or monopulse. The
information the radar provides may be used by an operator or can
be fed to a computer. Before the radar can track a target, it must
first of all find it, so the radar may first operate in a search or
acquisition mode. Normally, many radar tracking systems employ a
separate search radar known a s acquisition radar which designates
targets to the tracking radar by providing information about the
location of the targets. The tracking radar then performs a limited
search in the area in order to acquire the target. If there is not
much change from scan to scan, it is possible to reconstruct the
track of the target from the data gathered. When the traffic is dense,
the d a t a become unmanageable to the operator a n d is fed
automatically to a digital computer. Then the process is called
Automatic Detection and Track (ADT).When data from more than
one radar are combined to provide target tracks, the process is called
Automatic Detection and Integrated Track (ADIT)
6.5.10
Side Looking Air-Borne Radar (SLAR)
There are several methods by which discrimination between
wanted and unwanted targets or between separate targets can be
accomplished. Also, by forming an image, discrimination can be
improved. In this method, the antenna scans across the screen in a
raster fashion or by linear motion. In side-looking air-borne radar,
a long antenna is mounted on the side of the aircraft. It has a narrow
horizontal beamwidth (0.l oor less). Its vertical beam which is wide
provides a wide swath parallel to the aircraft track. The pulse length
and the horizontal antenna beamwidth determine the resolution on
the ground (20m x 20 m at 16 km range). But as the range increases,
the azimuth discrimination deteriorates. This is overcome in the
synthetic aperture radar4.
6.5.11
Synthetic Aperture Radar (SAR)
In the SLAR described above, the resolution is limited by the
size of the antenna. But there is a limit to the size of the antenna. In
the synthetic aperture radar this difficulty is overcome by employing
additional signal processing. Even at long ranges it has very high
Microwave Camouflage
resolution. The principle is given in Fig 6.11. Let u s say that from
time t = t, to t = t2, the aircraft has covered a distance L. At t = t, the
object P on the ground is just on the edge of the radar antenna
beam. The beam has a width 6, corresponding to this situation. At t
= t2the object is leaving the other side of the beam. During the time
interval t2 - t, for a range R a resolution Re, is achieved. This
corresponds to a n apparent beam width of 0,. Although this
beamwidth is narrow, it is equivalent to that available if the antenna
had actually had an aperture size L. Hence the system gets the
name synthetic aperture radar. At t = t, the target return has a
small positive Doppler shift. Figure 6.12(a)gives the SAR processing.
Figure 6.11. Synthetic aperture radar (principle).
Source: '
With permission from "Radar" by P.S. Hall, T.K. Garland-collins, R.S. Picton
and R.G. Lee, Brassey's, London O 1991 Brassey's (UK) Ltd., London.
189
190
Introduction to Camouflage & Deception
Figure 6.12. SAR processing.
Source:
With permission from "Radar" by P.S. Hall, T.K.Garland-collins, R.S. Picton
and R.G. Lec, Brassey's, London O 1991, Brassey's (UK)Ltd., London.
Between t = t, and t = t, it has no Doppler shift and at t = t, it
has a small negative Doppler shift, a s shown in Fig 6.12 (a).Let us
take another target Q at the same range. Which is shown by the
dotted line. Now the SAR processing involves subtraction of a
characteristic of Pgenerated inside the radar from both the Doppler
characteristics corresponding to Pand Q. This is shown in the third
figure of 6.12(b).The signals from Pand Q have different frequencies
but remain constant with time.
In order to see only the object P, the combined signal is passed
through a filter of narrow bandwidth but centred around& = 0. This
results in a high resolution at the point P.
By combining range gating with this method, a horizontal row
of points can be produced (Fig 6.13). When this process is repeated
for a slightly later period (t, + At) - (t, +At),this will correspond to the
return around Q.
Thus, pixel by pixel high resolution picture is built parallel to
the path of the aircraft. SAR generates high resolution pictures across
the radar look direction. The resolution obtained with SAR is a
function of the synthetic aperture L which in turn depends on actual
aperture size of the radar antenna La and the radar range R. The
, is determined by La.Resolution on the ground parallel
beamwidth 8
to the aircraft track is given bf
Microwave Camouflage
In order to approach resolution of this order, a very stable radar
oscillator and a very steady aircraft are necessary.
Radar Picture
Aircraft
tract
Pixel
Good
resolution
by SAR
processing
Good resolution by range gating
Figure 6.13. Creation of SAR image.
Source:
With permission from "Radar" by P.S. Hall,T.K.Garland-collins, R.S. Picton
and R.G. Lec, Brassey's, London O 1991, Brassey's (UK) Ltd., London.
6.5.12
Millimeter Wave Radar
Bhartia and Bah18have discussed the potentialities of millimeter
waves and their applications. The wavelength range 10 mm to 1
mm (30-300 GHz) is generally referred to a s the millimetre region of
the electromagneticspectrum. The characteristics of this region make
them more suitable in certain applications and offer distinct
advantages over microwave, infrared and-electro-optical systems.
But technological developments in the region have been rather slow
in the past because of certain difficulties, chiefly associated with
generation and detection of the waves in the region.
1 91
192
Introduction to Camouflage & Deception
The chief characteristics are their short wavelength, wide
bandwidth and environmental interaction. Short wavelengths and
associated narrow beamwidth result in better resolution, precision
in target tracking and discrimination, low angle tracking capability,
good resolution for closely spaced objects and high angular resolution
for a r e a mapping. The principal atmospheric windows in the
millimetre wave region eiist at 8.6,3.2,2.1 and 1.4 mm wavelengths.
These correspond to the frequencies 3 5 , 9 4 , 140 and 220 GHz. The
bandwidth available a t each of these windows is extremely large,
roughly 16, 23, 2 6 a n d 7 0 GHz respectively. This helps i n
accommodating all the lower frequencies including microwave
frequencies. Likewise, maxima of absorption bands are a t 5, 2.5
and 1.6 mm wavelengths. These correspond to the frequencies 60,
119, a n d 1 8 3 GHz. These have large bandwidths. This wide
bandwidth characteristic provides high information rate capability
for obtaining fine structure details of target signature, a s well a s
high range resolution and increased immunity to interference and
jamming. Their attenuation in aerosols, dust, smoke and battlefield
contaminants is less than a t IR and optical frequencies. Thus this
characteristic also scores over IR/optical systems.
Millimeter wave radars have several advantages - viz., small
size, small weight, high resolution in both azimuth and range. Also,
they can operate in adverse environmental conditions s u c h a s
poor visibility. Several research and development programmes for
groundg-15, seal6 and air s ~ r v e i l l a n c 22
e ~a~n d even space object
i d e n t i f i ~ a t i o n24
~ ~were
.
undertaken keeping the potentialities of
millimeter waves in mind. US h a s been engaged in developing
sophisticated surveillance and target acquisition millimeter wave
r a d a r s for t a n k location a n d engagement (STARTLE). Target
acquisition millimeter wave radars can carry out volume search,
detection, and discrimination of targets from clutter. Also, target
classification and identification into categories, e.g., moving tank,
types of aircraft (rotary or fixed wing) would be possible. These
systems are suitable for Low Level Air Defence (LLAD)applications.
They can be used effectively against low flying aircraft. Millimeter
wave radars can be used to distinguish between targets in motion
and stationary ones, a s even small vibrations of targets can result
in a large change in phase.
A number of millimeter wave tracking radars a r e being
designed. In seekers and missile guidance applications millimeter
wave radars complement or replace electro-optical systems because
of their characteristics s u c h a s small size, high accuracy and
reasonable performance in adverse weather conditions. Several
studies on millimeter wave sensors and guidance systems viz., active,
Microwave Camouflage
passive, semiactive and dual mode-have been carried out. The
primary role of terminal guidance seeker includes range and attitude
control, target search and detection, and target tracking and homing.
Two types of systems are common, viz., Lock-On-Before-Launch
(LOBL) and Lock-On-After-Launch (LOAL). Dual mode operations
are possible, with microwave tracking being used for long range
search and target acquisition and millimeter wave system for
precision tracking, once the target is within the range.
Millimeter wave technology, when fully developed, although it
cannot completely replace microwaves and IR/EO systems, will be
far superior in certain applications and will also find new
applications.
ROLE OF RADAR IN WAR
6.6
Probably no other sensor finds more applications than radar
in war. It is used in all the theatres of war both in defence and in
offence. Broadly, its tasks include battlefield surveillance, air defence
and weapon tracking and locating. Its physical dimensions can vary
widely ranging from enormous permanent structures to pocket size
or hand-held meters4. Depending upon the nature of the task it is
intended to perform, it can be static having permanent installation,
or can be mounted on a mobile platform such a s aircraft, ship,
space vehicle, or man-portable, or can be mounted on a weapon
system as big as a missile.
In the case of objects of large dimensions with RCS greater
than 100 m2, detection as well as localisation are possible, besides
some degree of target identification. In the case of small objects, the
information the radar can give is in bits and snatches. However, the
extent of information that can be obtained from the radar output or
display depends upon the knowledge and experience of the radar
operator or interpretor, besides the ground truth and collateral
information that is available. With the rapid advances that are taking
place in radar technology and in allied fields, the threat from radar
will become greater and greater. The performance of radars will
greatly enhance detectability, recognition and identification of
important targets and discrimination of targets-stationary or moving
and background.
6.6.1 Types of Radars Used in War
Radars used in war, based upon their applications, may be
discussed under three groups:
(i) Battlefield surveillance radar (BSR)
(ii) Weapon locating radar (WLR)
(iii) Air defence radar (ADR)
193
194
Introduction to Camouflage & Deception
Battlefield Surveillance Radar (BSR)
This radar category may be divided into two groups - short
range operating u p to 30-40 km and long range operating beyond
100 km. The role of these radars in general is to provide timely
information about the eneniy's depolyment in the battlefield4.
The short range radars, which can be vehicle-mounted or
man-portable, can detect objects ranging from helicopters, tracked
vehicles, light vehicles, to group of men or even a single man. Ground
surveillance MTI radars which are truck-mounted provide coverage
of forward area close to forward edge of battle area (FEBA),within a
range of 15 km. These radars can do both search and track when a
large number of them are used along the front. They can provide
target disposition and location information to the artillery units.
Mortar and artillery locating radars are reported to detect and
determine the source of single mortar rounds and missiles.
The long range radars are mounted on platforms such as
helicopters and aircraft, both manned and unmanned, and also
satellites. When the range is beyond 100 km, the requirement of an
elevated platform arises owing to the earth's curvature.
SLAR and SAR, which have been discussed already, are the
important systems coming under long range airborne radars. SLAR
can produce high quality imagery of the surveyed area which can be
utilised for strip mapping. SARs are in general employed on high
flying reconnaissance aircraft. They can provide high resolution
imagery of the target area for creating a precise database to the
radar interpreter. With air-to-ground data link the processing time
can be a s low as half an hour. A modern SAR can have along flighttrack resolution of 3 m at altitudes of 12 km and a range of 15 km.
SAR at a tactical level can give information over target areas of size
10 x 10 km. It is likely that, with high speed digital processing, SAR
data can be processed in real time in the aircraft itself. SLAR and
SAR appear to pose the greatest threat to targets on the ground
because of their high angle and range resolution.
6.6.3 Weapon Locating Radar (WLR)
The role of a weapon locating radar, as its name implies, is to
detect the launch of an enemy projectile or missile, and also to
determine the path of the weapon in flight to the extent required for
a computer to compute the location of the launchep. Weapon locating
radars are highly complex and very expensive.
6.6.4
Air Defence Radar (ADR)
Air defence is one of the greatest priorities for ground forces,
as enemy's aircraft and missiles can rapidly approach ground targets
6.6.2
Microwave Camouflage
with very little warning. A radar can be very effective against such
threats. The role of air defence radar is to detect and destroy the
airborne system before it hits the ground object. Air defence radars
can be discussed under four groups - strategic, long range, medium
range and short range4.
The strategic radar must be able to detect intercontinental
ballistic missiles or submarine-launched ballistic missiles or even
orbital vehicles. Obviously, these radars should have ranges of several
thousands of kilometers.
The long range radars have ranges beyond 370 km and face
threat from aircraft including missiles. The medium range radars
have ranges over 200 km. The short range radars have a detection
range of 55 km.
6.6.5 Other Types of Radar
Other radars4which are used in war include: (i)active homing
guidance radar which is incorported in the missile in its homing
head. The surveillance radar provides the target parameters to the
missile and the tracking radar locks on to the target to be destroyed.
Simultaneously, a ground radar continuously monitors the target
and guides the missile to the target; (ii)a semi-active homing radar
on the ground illuminates the target such that a strong echo is
obtained from the target. A tracker on the missile uses the echo for
homing on to the target; (iii) a track via missile guidance radar
employs a combination of command and surveillance guidance, and
(iv)a n identification friend-or-foe (IFF)radar sends a signal that is
picked u p by a receiver on board of a friendly aircraft. The receiver
triggers a response which is picked u p by a surveillance radar on
the ground. This response contains the necessary information in
order to find out whether the aircraft is a friend or foe.
Other miscellaneous radars4 which may be used in battlefield
are: (i)unmanned aircraft radar which employs low power millimeter
waves; (ii)remotely piloted vehicle tracking radar which is of short
range, used by a pilot or the operator to control the vehicle; (iii)an
antitank homing missile radar which utilises millimeter waves for
homing missiles to attack MBT; (iv)a millimeter wave radar homing
head which will be incorporated in guided weapons for homing on
to a target; (v)a passive radar homing head which utilises the passive
microwave radiation emitted by the target, and (vi)tank automatic
defence radar which automatically activates a gun in the tank upon
locating a missile approaching a tank.
6.7
RADAR CROSS SECTION (RCS)
Radar Cross Section (RCS)is a n important physical quantity
associated with targets where the s e n s o r employed for
195
196
Introduction to Camouflage & Deception
sensing is the radar. The concept of RCS, its prediction, measurement
and methods for its reduction have been dealt with in detail by
Knott, et aP5.
Whenever electromagnetic radiation is intercepted by an
obstacle, the energy gets dispersed in all directions. The angular
distribution of energy depends upon the characteristics of the
obstacle and the quality of the radiation. This energy distribution is
in general known a s scattering.
In a practical situation, such a s application of radar, the
obstacle is the target, a transmitter provides radiation, and a receiver
receives a part of the radiation scattered by the target. Quite often,
the radar transmitter acts as receiver also and the radiation scattered
backward is picked up. This is known as monostatic scattering, as
different from bistatic scattering, where a separate receiver located
a t a different point is used. When the angle subtended at the target
by the transmitter and the receiver is small, the scattering may be
considered a s monostatic and when this angle is 180°,it represents
forward scattering a s different from back-scattering.
The target is attributed a fictitious area known a s cross-section
which is a measure of the energy/power scattered by in the direction
of the receiver. The antenna of a radar transmitterlreceiver is
ascribed to possess an aperture having an effective area which
transmits/extracts electromagnetic energy. The product of the
effective area of the receiving antenna and the incident power density
is the power available to the radar receiver. Similarly, the product of
the fictitious area of the target and the incident power density is the
power reflected/scattered by the target. The fictitious area is, in
general, known as, the scattering cross-section of the target. The
term radar cross-section (RCS)is used in the special case when the
scattering is monostatic. The symbol used for RCS is o.
6.7.1 Expression for RCS
The general expression for RCS of a target can be derived in
terms of the strength of the incident electric field and scattered
electric field at a large distance.
Mathematical treatment of RCS of targets (spherical and
cylindrical) has been dealt with by Knott, et a1 and 0 t h e 1 - s ~ ~ ~ ~ ~ .
The unit of RCS is mZ. o may be considered as the projected
area of an equivalent reflector which has uniform properties in all
directions. Such a reflector is a sphere which will reflect the same
power per unit solid angle. A sphere of 1.12 m diameter has an
echoing area of 1 m2. Except for sphere, for all other geometries the
value of RCS varies with the aspect angle relative to the receiver.
Microwave Camouflage
able 6.4 gives the typical values of RCS of some common (including
military) objects.
Figure 6.14. Radar cross-section of a conducting sphere.
Source:
Reproduced with permission from McGraw-Hill Companies Ltd. Radar
Handbook by Skolnik, M.I.1970.
Because of the wide variation in its value it is more convenient
to express o in a logarithmic scale rather than in a linear scale.
Accordingly, o is expressed in decibels
dBsm = 1 0 log,,o
where dBsm are decibels above a square meter.
Figure 6.14 shows the monostatic radar cross-section of a
perfectly conducting sphere. The diagram actually shows the
variation of o normalised by ra2and the ratio of the circumference
offhe sphere to the wavelength 2na5s6.The graph is characterised by
three distinct regions:
(i)
Rayleigh region (low frequency).
In this region where the circumference is less than one
wavelength, the radar cross section varies inversely as the fourth
power of the wavelength; o is independent of the viewing angle.
1 97
198
Introduction to Camouflage & Deception
Table 6.4
Source:
.
Typical values of RCS of usually encountered1 objects
including (military)objects
Object
RCS in m2
Jumbo jet
100
B- 17 Flying fortress
80
B-47 Bomber
40
B-52 Bomber
10
B-1 Bomber
1.O
Large fighters
5-6
Small fighters
2-3
Small single engine plane
1.0
Man
1.O
Small bird
0.01
Insect
0.00001
F- 117A Stealth fighter
0.6
B-2 Stealth bomber
0.01
"Reprinted by permission of the society for the Advancement of Material and
process Engineering" Stealth Aircraft and Technology from World War I1 to
Gulf War History and background by Roger A. Stonier.
(ii)MIE or resonance region.
A s the normalised sphere circumference (2ndh) increases
(1 < 2 n a l h < 10) or t h e wavelength i s between 1.0 to 10
circumferences, the normalised RCS exhibits oscillatory behaviour.
This phenomenon is due to interference between the specularly
reflected component of the scattered radiation and the waves which
creep around the back of the sphere and then return in the direction
of the radar receiver 34. This is also known as resonance region. As
the waves creep around the back of the sphere they get damped,
and a s such the RCS shows damped oscillations;
(iii)Optical region (high frequency)
A s the wavelength becomes still smaller (2naIh > 10) the cross
section reaches the specular value o = na2(the projected area of the
sphere). Whatever be the method adopted for predicting RCS of a
sphere which is perfectly conducting, at high frequencies, it attains
the value na2.
Instead of being perfectly conducting, if the sphere is made of
a dielectric material, the variation of RCS with wavelength is shown
in the Fig 6.15.
Microwave Camoujlage
The refractive index of the material of the sphere is taken as n=
2.5 k i 0.01. The curve shows the normalised RCS = na2 in dB as a
function of the radius of the sphere in wavelength a / h 35. In the case
of a dielectric sphere the internal reflection of the fields penetrating
into the sphere plays a significant role.
Figure 6.16. RCS of a lossy dielectric sphere.
Source:
Reprinted by pennission of IEEE,New York, O 19XX,lEEE Back scatter from
a sphere - A short pulse view. J. Rheinstein. IEEE Trans vol AP-16, Jan.
-
1968.
Methods for the Prediction of RCS
Methods for prediction of RCS have been dealt with qualitatively
~~
a1, in detail.
by Skolnik5and K n o t t ~ et
Theoretical study of RCS of basic shapes enables u s to
understand the mechanisms involved in the scattering by complex
shapes. The methods are either based on exact theories wherever
possible, or approximate theories in most of the situations. The values
so arrived a t for RCS are subject to verification by comparing with
experimentally determined values.
The theoretical prediction of RCS involves the treatment of
scattering phenomenon in terms of electromagnetic theory. The
interaction of the incident electromagnetic field with the scattering
body is dealt with by solving Maxwell's equations with appropriate
boundary conditions depending on the geometry of the body.
The two important mathematical techniques employed to axrive
at exact solutions are;
6.7.2
199
200
Introduction to Camouflage & Deception
(i)The separation of variables, and
(ii)The integral equation formulation
Solutions through the former technique are possible only in a
few cases in which the wave equation is separable in a coordinate
system in which the body surface coincides with one of the
coordinates2'. Examples of such cases are sphere, spheroid, torus,
paraboloid etc. The second approach describes the scattering
phenomenon in terms of a n integral of various vector products
involving the surface electric and magnetic fields and unit vector
~~
is one
locally normal to the body surface. C h u - S t r a t t ~ nintegral
type of integral employed in the technique. When exact integral
equations of Chu-Stratton obtained by using Green's theorem in
conjunction with Maxwell's equations are solved by modern
computers, they provide the scattered fields from which RCS is
c a l ~ u l a t e dThe
~ ~ .method is applicable in situations where the body
dimensions do not exceed a few wavelengths of the incident
electromagnetic radiation. In reality exact solutions are rare. A s such,
in many practical problems approximate theories are adopted. The
various approximate theories are:
(i) Geometric optics approach
A s the name implies, it treats bundles of rays by laws of
reflection and refraction. But the method fails to account
for interference and polarization characteristics of the
radiation30.
(ii) Physical optics approach
This approach utilises electromagnetic theory a n d
simplified approximations to arrive a t the surface current
distributions of the Chu-Stratton integral. But this method
fails for accurate specifications of polarisation31.
(iii) Geometrical theory of diffraction
This utilises geometrical optics for taking into account
diffraction effects32.This is a combination of ray approach
with wavelength and phase characteristics. But this method
fails at caustics.
Besides the above, there is the method of equivalent current
and physical theory of diffraction for treating edges.
6.7.3 RCS of Flat Plate
For predicting the RCS of a flat plate, both physical -opticsand
geometrical theory of diffraction have been employed. Figure 6.16
shows the theoretically predicted RCS of a flat plate of size
approximately5 h on a side36and comparison with experimentalvalues.
Microwave Camouflage
10 1.
Vertical polarization
1
;
Horizontal polarization
0
Qeometric diffraction
-5
-10
-15
-20
-25
-30
-35
-*0
20
40
60
80
100
Azimuth aspect angle a (degrees)
Figure 6.16. RCS of a flat plate.
Source:
6.7.4
Reprinted by permission of IEEE, New York, O 19XX IEEE RCS of a 6.5 by 6.5
inch flat plate' by R.A. Ross, IEEE Trans vol. AP-14,May 1966
RCS of Re-entrant Bodies (corner reflectors)
Corner reflectors are formed by a combination of two or three
mutually perpendicular flat plates. The dihedral corner reflector is
formed by two flat plates with their planes perpendicular to each
other. The trihedral corner reflectors have three faces which are
mutually perpendicular. These bodies have large radar cross sections.
These are used in order to enhance the radar echoing efficiency in
the direction of the receiver. In the case of dihedral corner reflector,
double reflection contributed by the two faces provides passive
enhancement of the RCS. The physical optics method has been
applied to predict the RCS of dihedral comer reflector. But the method
is not satisfactory while providing detailed aspect, polarization and
biostatic dependence. Geometric theory of diffraction provides more
information.
Figure 6.17 shows RCS of a dihedral comer reflector with square
faces of side 17.9 cm, experimentally determined at a frequency of
9.4 G H z ~The
~ . central part is broad. This is due to the interaction
between the two faces with the incident wave. It gets reflected twice,
once from each face. The peaks on the left and right side of the
central portion are due to direct reflections from each face. The
ripples in the middle are due to side lobes of the individual face
patterns.
201
Source:
'Reprinted with permission from Radar cross section by E.F.Knott, J. F. Shacffer and M. T.Tuley, Artech
House, Inc. Norwood, MS, USA, http://www. artech-house.com
Figure 6.17. RCS pattern of a 100°dihedral comer with square face 17.9 cm along a side
measured at 9.4 GHz.
Aspect angel (degrees)
Microwave Camouflage
6.7.5 General Discussion on RCS of Simple Bodies
Of the various scatterers which we have considered so far, the
corner reflectors have the highest RCS. Then, in decreasing order
come the flat plate, the cylinder and the sphere. In terms of frequency,
the flat plate, the cylinder and the sphere are proportional to F2 ,F1,
F0 respectively (where F stands for frequency). In terms of size
dependence they are proportional to L4,L3 and L2 respectively (where
L stands for the linear dimension) for these objects.
6.7.6 RCS of Military Objects
RCS is a measure of the signature of military object concerned
in the microwave region. Hence its determination is very imporant
before any means to suppress RCS is thought of. Among the various
military objects to be considered, aircraft, ship and tank are of the
greatest importance. These objects are complex, consisting of a
large number of significant scattering centres, besides equally large
numbers of less significant ones.
6.7.6.1 RCS of aircraft
Figure 6.18 shows the RCS pattern of a scale model of a
commercial aircraft. The pattern over 0" to 360' aspect angle is zigzag.
Such a pattern arises because of the mutual inference of the scattered
waves which are in phase and out of phase. There is a wide variation
between the maximum and minimum values of the RCS over 360".
Broadly, we may consider the nose-on, broad-side and tail-on aspects
for discussion. In each of these views there are a large number of
major scattering centres. In the nose-on aspect, the major scattering
centres are jet intake ducts, radar antenna a t the nose and leading
edges of the wings. They provide corner reflectors, doubly curved
and singly curved surfaces. Likewise, for the broadside incidence,
upper wing surfaces, fuselage, vertical fins and the horizontal
stabilizer are the more significant scattering centres. In the tail-on
aspect, engine exhaust ducts are the major scattering centres. More
or less, all the mechanisms of scattering come into play in the
macroscopic scale. Fig 6.19 gives RCS of an aircraft in mete9 vs
azimuth angle.
6.7.6.2 RCS of ship
RCS of a ship is probably the largest of all the military objects.
Fig 6.20 gives the RCS pattern of a large ship. The values of RCS are
shown a t two different frequencies from 0° to 360". The three traces
correspond to 20,50 and 80 percentile levels. The ship's hull a t the
broadside incidence, the superstxucture the masts and the large
assortment of fixtures on board such a s the vents, hoists, lockers,
pipes, canduits etc are the significant scattering centres.
203
-120
-90
-60
-30
Source:
0
Pulse Gated Compact RCS Range
30
60
90
compact RCS range' N.A. Howell 1970G-APInternational programme and digest =RE.
Reprinted with permission of IEEE, New York O 19XX IEEE. 'Designof pulse-gated
Figure 6.18. RCS of a model of aircraft Boeing 737.
-180 -150
120
150
180
Microwave Camouflage
Fuselage
I
I
!
Leading edge
of wing
I
1
Trailing edge
of wing
Azimuth angle
go0
n
Figure 6.19. RCS of an ahcraft.
Source:
Reprinted with permission from Microwaves made simple : principles and
applications (ed)W. Stephen Cheungand Frederic H. Levien, chapter 14 Radar
Systems by Frederic W. Levien-Artech Houe Inc., Norwood MA USA.
http://www. artech-house.com
Similar to an aircraft, the RCS variation from different angles shows
a somewhat zigzag pattern but the amplitude of fluctuation is not
as large as it is in the case of aircraft.
205
206
Introduction to Camouflage & Deception
Port
board
board
Figure 6.20. RCS of a ship (a) Frequency = 2.8 GHz,
(b)Frequency = 9.225 GHz.
Sourae:
Reproduced from Introductionto Radar systems by M.I. Skolnik with permission
of the McGraw-Hill Companies O 1980,1962 by McGraw-Hill Inc.
Microwave Camouflage
6.7.6.3 RCS of Tank
Figure 6.21 gives RCS of a tank. Over an angle 0° to 360°
aspect angle RCS exhibits significant variation.
o0
Figure 6.21.
RCS of a tank.
Source:
Reproduced from Radar by P.S. Hall, T. K. Garland-collins, R. S. Picton
and R. G. Lee with permission of Brasseys (UK) O 1991 Brassey's (UK)
Ltd.. London.
6.7.7 Advantages asd disadvantages of prediction techniques
Advcmtage~~~*~~.~~
(i) Quite often, in many situations, prediction techniques are more
economical than actual measurements indoor or outdoor;
(ii) Even before a prototype or model of the target is available,
prediction techniques help u s in giving the RCS. This is quite
often useful in the design of the target for reducing the RCS;
(iii)With the predicted values we can analyze the data with respect
to various shapes and also materials used for reducing the RCS;
(iv) Once the target is modelled, calculation and analysis and their
variation with frequency and polarization are a question of
computer time.
208
Introduction to Camouflage & Deception
Disadvantages
(i) Predicted values cannot take all factors into consideration and,
as such, these values are always underestimates;
(ii) The method cannot be used for complex bodies for which
electromagnetic modelling is difficult.
On the whole, the prediction method based on mathematical
modelling and subsequent confirmation with high speed computers
would be of great help both for designing a controlled RCS target
and radar equipment design.
6.7.8 RCS of Targets Experimental Determination
Mathematical modelling methods are applicable only to simple
geometrical structures. An actual target has to be broken down into
a number of simple structures before the prediction techniques can
be applied. Although experimental determination is more expensive,
it is comparatively easier, once a model of the target, either full
scale or small scale, can be made. Broadly, there are two methods,
viz., (i)The outdoor method, and (ii) the indoor method.
Knott, et aZZ5have discussed a t length the various aspects of
RCS measurements employing outdoor and indoor ranges. The
objectives of carrying out RCS measurements are broadly a s follows:
Measurement Objectives
These measurements enable u s to understand the basic
scattering processes and are useful for checking the validity and
the limitations of the theory of RCS. Secondly, RCS measurements
provide data for identification of 'flare spots'. Thirdly, for verifying
the RCS performance of a new system, although computer
programmes are capable of predicting the performance, experimental
values are extremely useful. Also, they would be useful for building
a database.
An RCS measurement facility, whether it is outdoor or indoor,
should have the following:
(i) An instrumentation radar for transmitting and receiving the
signals;
(ii) Recording instruments-analog or digital for storing the
information;
-
(iii) A target mount which can be rotated;
(iv) An anechoic environment o r low background signal
environment; and
(v) A test target of full size or scaled-down model.
Microwave Camouflage
For carrying out measurements on large targets, outdoor ranges
are used. On small targets and scaled-down models measurements
are carried out indoor.
6.7.8.1 Outdoor Ranges
There are two reasons for employing outdoor ranges. Firstly,
far field range requirement can be achieved, and, secondly,
measurements can be carried out only outdoor on large targets.
Instrumentation for outdoor ranges is relatively simple.
Skolnik's Radar Handbook5 gives a detailed account of radar
instrumentation needed and different conditions and requirements.
A simple instrumentation radar for measurement of RCS
consists of an RF source of a few hundred watts of power. The RF
power is amplified by a Travelling Wave Tube Amplifier (TWTA). A
trigger pulse from a pulse generator turns on the TWTA for a short
time. The pulse widths employed are in the range 0.1 to 0.5 ps.
Either a single antenna for transmitting and receiving can be used,
or two separate antennas can be employed. An RF attenuator adjusts
the signal level into the receiver. The target signal together with
that of a local oscillator is fed to a mixer preamplifier from which
the signal is delivered to an IF amplifier. The IF amplifier is usually
of the dynamic range of 60-70 dB. The output is recorded on an
analog chart recorder or on a digital recording system.
The salient features of an outdoor measurement range are:
(i) A target support system;
(ii) Range geometry keeping in view the height of the antenna,
target, range etc;
(iii) instrumentation radar;
(iv) Measurement of background return most of which is due to the
target support system; and
(v) System calibration with the help of a known return from a
primary calibration standard.
The target is mounted and observations are taken for different
angular positions of the target by rotating the target mount.
Ground plane effect which arises due to the proximity of the
ground to the antenna can be advantageously utilised for increasing
the overall sensitivity of the system by concentrating more energy
on the target.
Since the targets for which RCS is required are from defence,
usually these ranges are owned by defence departments. However,
large aerospace companies such as McDonnell Douglas and Boeing
have outdoor ranges. Information on radar ranges existing in various
countries is not available in open literature.
209
210
Introduction to Camouflage & Deception
6.7.8.2 Indoor RCS Ranges
One of the most important advantages of carrying out
measurements indoor is that they are free from environmental factors
such a s wind, rain etc. Outdoor measurements cannot be carried
out in rain, a s rain drops cause clutter. High velocity winds create
the problem of instability to the target mount. Another disadvantage
of the outdoor measurements is that they can be observed by
satellites from above.
Indoor measurements have certain limitations. Measurements
can be carried out only on small size targets. One very important
problem faced by indoor measurement range is the elimination or
reduction of the effects of reflection from walls. The chamber in
which measurements are carried out has to be of appropriate
geometry and the walls of the chamber should be covered with
anechoic material with respect to the frequencies being used in the
measurement.
The essential features of a n indoor range are:
(i) The geometry of the chamber
The chamber is of tapered design. This geometry removes
specular reflections from side walls. The walls are covered by
pyramidal absorbers whose thickness is determined by the
lowest frequency that would be used. The lower the frequency,
the thicker will be the pyramid. The material used for the
pyramid is polyurethane foamed rubber;
(ii) The radar used is FM-CW type;
(iii) RCS measurements can be carried out at frequencies as low as
120 MHz and as high as 93 GHz. When measurements are
carried out on scaled-down models of real targets, the radar
frequencies have to be correspondingly raised.
6.8
METHODS FOR REDUCTION OF RCS
Reduction of RCS of military objects is the same as suppression
of radar signature of the object concerned. In classical terms it may
be known as microwave camouflage, or in modern terminology it
constitutes a major component of Stealth or Low Observable
Technology (LOT).Methods of reduction of RCS have been dealt with
by several authors 25,26,38,39.Knotts, et al 25 have discussed a t length
the various methods for the reduction of RCS of various weapon
platforms.
Many of the weapon platforms such as combat aircraft, warship,
armoured vehicles, missiles and weapons are detected by radar over
long ranges. In order to reduce their detectability so that they
successfully cany out their mission, the RCS of these military objects
Microwave Camouflage
must be reduced below the detection probability. Basic techniques
for reducing RCS of targets fall into four categories. They are:
(i)
(ii)
(iii)
(iv)
Shaping;
Use ofRAMs;
Passive cancellation; and
Active cancellation
6.8.1 Shaping
Today, computer-based RCS modelling, numerical methods
of predicting RCS, and measurements on small scale and full scale
models and actual objects have made it possible to arrive a t a
tentative design of a n antiradar target before it is actually fabricated.
These methodologies give a n insight into the various shapes and
sizes that affect RCS a t different frequencies and aspect angles
and identification of hot spot catering centres and resonant
scatterers.
The concept of reducing RCS by shaping is simple. The designer
of the antiradar military target has to orient or alter the shape of
the surface which is responsible for the RCS in such a way that the
incident radar signal is deflected away from the receiving radar.
This involves reshaping without altering the other design parameters
which might affect the performance of the system. While shaping,
the two important parameters that must be considered are the aspect
angle, i.e., the direction from which the transmitted signal is incident
on the target surface, and the frequency. These two broadly depend
on the nature of the threat. Accordingly, reshaping and other
measures have to be taken to reduce the overall RCS.
The entire military target may be decomposed into its
constituent components and their geometrical shapes and sizes
studied. The basic geometrical surfaces which we know are to be
avoided are flat, cylindrical surfaces, sharp edges, abrupt angles,
re-entrant structures, corner reflectors and cavities. These have to
be changed or oriented in such a way that the return signal is either
reduced to the extent required or deviated into a different direction.
Sleek, smooth and continuously varying contours and rounded
shapes are to be used. These changes in the military object, if it is
an aircraft, should be aerodynamically acceptable. A shape which
has low RCS a t all aspect angles is an ideal situation not possible to
achieve in practice, and compromises a n d trade-offs occur
throughout the design with concomitant loss of aerodynamic
efficiency.
Let u s take two specific examples with reference to aircraft.
21 1
212
Introduction to Camouflage & Deception
6.8.1.1 8-2 Bomber and F-117Afighter
Stonier has discussed the salient aspects of RCS of B-2 bomber
~ " ~shape
.
of the B-2 bomber is such
and F- 117A fighter a i r ~ r a f t ~The
that it deflects a large percentage of radar energy away from the
direction of the transmitterjreceiver antenna. There is no
conventional fuselage and vertical tail. The engine inlets have an
unusual design consisting of irregular edges, smoothly rounded in
some areas and with skip angles and flat faces in other areas in
order to effectively deflect the radar echoes.
F- 117A has broad flat exteriors which are inclined in such a
way that the radar signal is deflected away from the direction of the
receiver. It has compact, smooth external geometry and overall
reduced size. It has no external protuberances and the tips of the
wings are rounded. The flat faces are angled in such a way as to
deny signal returns to the searching radar. The body has thin, swept
wings, butterfly tail, finely pointed nose, bubble canopy, triangular
shaped wind shield and air intakes which are carefully designed
and shielded from ground-based surveillance.
For aircraft, various geometrical shapes have been studied
keeping in view the aerodynamic aspects. The complex contoured
surfaces must be manufactured to precision dimensions. Such
precision can be achieved better with composites than metals.
It seems unlikely that any aerodynamically viable shape can
avoid having a large RCS when viewed from some angles. B-2bomber
shows u p a very large and flat surface from above and below.
Presumably it can easily be detected by radar from these aspect
angles.
6.8.1.2 Ship
F o ~ w e lhas
l ~ ~discussed the salignt aspects of RCS of a ship.
Both the macro- and micro-geometry of the ship must be taken into
consideration. The frequencies which are used for detection of ships
lie in the range of 10 MHz to 300 GHz. Naval targets are sufficiently
large for frequencies from 1 GHz and higher. Both the entire target
and super-structure must be taken into consideration. The entire
structure can reflect radar energy. Also, sections of super, structure
such as hand rails, bollards, wire ropes, deck lockers and weapon
system such as radars, guns, missile launchers etc. will reflect radar
energy. Such objects are approximately of the same size as the
wavelength of the incident radar and are termed resonant scatterers.
Resonant scatterers may be eliminated to some extent by housing
them within the super-structure. The superstructure is designed
in such a way that the reflected radar energy is deflected away from
the direction of the enemy's radars. This has led to the box-like
Microwave Camouflage
box-like superstructure, but with sloping sides. Hot spots are treated
with radar absorbing materials.
New ships are being designed with reduced RCS with the help
of computer design. The vertical section of the hull and the reflecting
water constitute corner reflector geometry which can give rise to
large RCS. Low RCS hull design would entail substantial costs. Any
low observability depends on the angle the hull sides make with the
sea. In comparison to the aircraft, the RCS of a ship cannot be
reduced to the same extent. Two important approaches may be
adopted. Firstly, the RCS may be reduced to an extent a t which it is
indistinguishable from a decoy such as a floating corner reflector or
a chaff cloud, or the signal received from an off-board decoy. At that
point, a properly warned ship ought to be able to evade radar guided
missiles, even from those which it cannot see. Decoy technology
might become much more important if the stealth technology makes
incoming weapons almost undetectable. Air-dropped ship simulators
already exist in the U S Navy. They are sufficiently powerful to imitate
RCS of ships. Shaping cannot altogether reduce RCS, whereas radar
absorbing materials can drastically reduce residual RCS. Careful
designing can substantially reduce RCS by using shaping smoothing
surfaces and minimising the number of openings and re-entrant
structures and also keeping weapons and sensors inside the
superstructure when not in use.
6.8.2 Radar Absorbimg Materials ( M s )
Knott, et a125have given a detailed treatment of the mechanism
of absorption of various radar absorbing materials. Salient aspects
~ ~the
, ~design
~.
stage,
of the RAMS have been discussed by S t ~ n i e r At
reduction of RCS by shaping of the composite part responsible for
contributing towards radar echo is possible, in case the change of
shape does not adversely affect the performance of the intended
role of the component or the system a s a whole. Also, once the
design is completed and the system is in the final form, reshaping
of any composite part may not be possible. In all these situations
reduction of RCS can be done by the application of radar absorbing
materials (RAMS).
Since World War I1 the science and technology of radar
absorbing materials have greatly advanced, and today the field k3s
become an important part of stealth technology. Initial experimects
on these materials commenced during 1940s. In general, it was
known that less dense materials like wood, textiles and plastic are
more transparentlless reflecting to microwaves than more dense
materials.
21 3
21 4
Introduction to Camouflage & Deception
6.8.2.1 Theory
Basically, when a radar wave is incident upon a radar absorbing
material (RAM) it does not allow the wave to undergo reflection;
instead, it transmits the wave and then dissipates the energy, either
by absorption, or by destructive interference. In order to avoid
reflection the material should match the impedance of free space to
that of the surface being shielded. Absorption of energy is
accomplished by "lossy" dielectric and/or magnetic properties of
the material. Special materials have to be made in order to
incorporate the "lossy" property to the extent required. The design
and development of a RAM involves:
(i) Type of the material - dielectric or magnetic;
(ii) Impedance;
(iii) Loss factor;
(iv) Thickness;
(v) Optical design.
By an appropriate combination of the various factors radar
absorbing materials responding to a narrow band or broad band of
frequencies can be developed. Knott, et a1 have derived the
expressions for: (i) reflection coefficient, (ii) scattering from flat
dielectric multilyered material for normal incidence, and (iii)
scattering for oblique incidence.
6.8.2.2 Practical Radar Absorbing Materials
The requisites of an ideal radar absorbing material25are:
(i) Available in thin sheets or as a paint which can be sprayed or
coated on to the surface of the target;
(ii) Light;
(iii) Cater for a broad band of frequencies;
(iv) Flexible;
(v) Water repellent;
(vi) Environment resistant; and
(vii) Economical.
A radar absorbing material can be attached to the target
permanently in the form of a sheet, or it can be in the form of a
panel which can be fixed as and when required, or a s a paint which
can be sprayed on to otherwise inaccessible parts, or it can be a
structural material. The method of application to be adopted depends
on the situation. A permanently attached panel adds weight and is
exposed to the enemy who may measure the RCS value of the target
surface. Panels which can be attached when required do not have
this disadvantage. Each method of application h a s its own
advantages and disadvantages.
Microwave Camouflage
6.8.2.3. Q p e s of radar absorbing materials
Radar absorbing materials can be classified in different ways.
In terms of frequency response they may be classified as narrow
(resonant)or broad band. A s per the physical mechanism they may
be divided a s dielectric and magnetic or circuit analog absorbers.
They can be classified a s single layer or multilayer. Salisbury screens
and Dallenbach layers are single layer dielectric absorbers; when
made as multiple layer absorbers they are known as Jaumann
absorbers. There are graded dielectric absorbers where the gradient
of the dielectric constant varies in the layers. Then there are magnetic
radar absorbing materials, circuit analog absorbers, hybrid materials
and Radar Absorbing Structure (RAS).There are specular and nonspecular and radar absorbing materials. The type of absorbers used
depends broadly upon the nature of application. The requirement
can be broad band or narrow band. Additional weight can be
detrimental.
6.8.2.4
Salkbury screen
It is one of the earliest types of absorbers invented during 1940s.
When used in single layer it responds to a narrow band of frequencies
and hence is termed a s a resonant absorber.
Resistive
sheet
_-:
1 &-.-I
I
'_-
Metal
Backing
Incident
plane wave
Plastic foam or
honeycomb spacer
Figure 6.22. Sdlsburg screen.
Source:
Reprinted with permission from Radar Cross section by E.F. Knott, J. F. Shaeffer
and M. T. Tuley, Artech house, Inc., Nonvood, MA, USA. http : //www. artechhouse.com.
21 5
21 6
Introduction to Camouflage & Deception
Salisbury screen consists of a thin layer of a lossy material
placed in front of the target surface at a distance of a quarter wave
length or odd multiple of Al4. The space between the two is filled by
a low dielectric constant material, usually foam or honeycomb.
A s shown in Fig 6.22, d is the distance between the metallic
ground sheet and dielectric RAM.
The sheet should have 377 ohms per square element, or
The dielectric constant of the spacer will be in the range 1.03
to 1.1. Let u s consider the theoretical performance of a Salisbury
screen with d = 0.5 inches (1.2 mm). Figure (6.23)(a)shows the
variation of reflected power with frequency for different impedances
(377 ohms, 300 ohms and 200 ohms) of the Salisbury screen. It can
be seen that the best performance is obtained for a resistivity of 377
ohms. The reflection coefficient exhibits a minimum a t a frequency
of 5.9 GHz and A = 5 cm. A t 300 ohms resistivity, the reflectivity is 18 dB and a t 200 ohms it is -10 dB. By increasing the spacer
thickness similar performance can be obtained a t lower frequencies.
Salisbury screen cannot be used for broadband applications.
A s the spacer thickness is increased there will be rapid oscillations
in its performance. For better mechanical rigidity higher density
foams or plastics may be used a s spacers. The thickness of the
spacer can be reduced by using a spacer with higher dielectric
constant. But by doing so the bandwidth is reduced. The Salisbury
screen can also be considered for oblique angle incidence. Figure
6.23 (b)shows variation of reflection coefficient of a Salisbury screen2'
a s a function of the angle of incidence. A s the angle of incidence
changes from 0 - 90" the reflection coefficient increases in the manner
shown by the curve.
An absorption of the order of 30 dB (99.9%)can be accomplished
over a narrow band. But these absorbers suffer from some
disadvantages such a s poor environmental resistance, poor
mechanical stability, substantial thickness, particularly a t low
frequencies, and also high ~ o s t ~ ~ , ~ ~ .
6.8.2.5
McMillcm absorber
McMillan absorber is similar to Salisbury screen and was
patented in 1959 26' 39. It makes use of destructive interference for
rendering itself non-reflecting. Between the front resistive skin and
the ground metallic surface, there is flexible foam rubber. When a
wave is incident upon it, it partly undergoes transmission and partly
reflection. The transmitted portion, upon striking the ground plane,
undergoes reflection which in turn undergoes a series of multiple
reflections. Each reflection gives rise to a transmitted portion above
the front skin since the foam rubber is of A/4 thickness or odd
multiple of A/4. The condition for destructive interference is satisfied
Microwave Camouflage
at the front surface and hence no reflection takes place. Thus
McMillan absorber is a narrow band absorber.
0
15
30
45
60
75
90
Incidence angle (degrees)
Figure 6.23. (a) Variation of reflected power with frequency for
different impedances (377 ohms, 300 ohms and 200
ohms); (b)variation of reflection coefficient of a Salibury
screen as a function of the angle of incidence.
Source:
Reprinted with permission from Radar cross section by E.F. Knott, J. F. Shaeffer
and M. T. Tuley, Artech House, Inc., Norwood, MA, USA .http://www.artechhouse.com.
21 7
21 8
Introduction to Camouflage & Deception
6.8.2.6 Dallenbach layer
Dallenbach absorber has been dealt with by Knott, et a1 25 and
StonieP, 39 and others. It is a single layer absorber consisting of a
homogeneous slab that can have either dielectric or magnetic
absorbing material. The impedance of the lossy slab is matched
with that of free space. Theoretically, if p, = &,forthe material there
will be no reflection. The actual absorption depends upon the loss
properties of the material E ; , p ; .
By increasing the permeability and permittivity of the layer the
refractive index 6can be increased. Consequently, there will be a
decrease in the thickness for the layer. Compared to Salisbury screen,
its thickness will be less by 75%. The transmitted energy into the
layer undergoes partial absorption before it is reflected from the
ground metal surface. Further, the portion that undergoes reflection
a t the ground surface gets absorbed in the material. If there is any
energy transmitted out of the layer and if it is out of phase by 180"
from the wave reflected from the front surface, there will be
destructive interference and hence no reflection.
6.8.2.7 Jaumann absorber and Graded dielectric absorber
These are multilayer absorbers which extend the bandwidth of
the a b ~ o r b e rand
~ ~ may
, ~ ~be considered a s extensions of Salisbury
and Dallenbach absorbers. In the Jaumann absorber, the impedance
tapers off from layer to layer starting from the front sheet to a low
value for the ground plane. The electrical properties are controlled
by varying the amount of fillers in each layer in order to achieve the
required amount of absorption characteristics. The bandwidth
depends upon the number of sheets. For a sheet thickness 0.76 cm
the increase in fractional bandwidth is 0.27. For 4 sheets of total
thickness 3.05 cm the corresponding increase should be 4 times
more, i.e., 1.2. Figure (6.24) shows the performance of multilayer
Jaumann absorber and the variation of reflected power with
frequency.
If the concentration of the filler is too high the conductivity will
be high and the energy reflected correspondingly increases rather
than being absorbed within the material. If the filler concentration
is too low there will not be enough absorption within the material
and a large amount of the energy of the wave will be reflected from
the internal surfaces or ground plane. The Jaumann absorber with
multiple plastic sheets replaces the multiple layer Dallenbach
absorber. The absorber can be tuned to different frequencies by
varying the impedances of the various layers. The impedance sheets
are separated by honeycomb spacers of h/4 thickness.
Microwave Camouflage
-
Figure 6.24. Performance of multilayer Jaumann absorber
variation of reflected power with frequency at different
thicknesses.
Source:
Reprinted with permission from Radar cross section by E.F. Knott, J.F. Shaeffer
and M.T.Tuley, Artech House, Inc, Nonvood, MA, USA. http://www. artechhouse.com.
Instead of tapering t h e s h e e t resistance, a graded
dielectric can be used. The mathematical approach for its solution
i s to analytically arrive a t the values of p a n d E a s a
function of distance from the ground plane over a given frequency
range.
Graded dielectric absorbers are commercially available
manufactured by Emerson and C ~ r n i n gFig
~ ~6.25
.
shows measured
reflectivity data of a commercial three layer graded dielectric absorber
of thickness of about 1 cm.
6.8.2.8 Magnetic absorber
The basic difference between a magnetic absorber and a
dielectric absorber is that in the former dissipation of energy takes
place principally by magnetic means, although simultaneous
dielectric loss also occurs.
21 9
220
Introduction to Camouflage & Deception
Frequency (GHz)
Figure 6.25. Frequency Vs reflectivity of a three layer graded dielectric
absorber.
Source:
Reprinted with permission from Radar cross section by E.F. Knott, J.F. Shaeffer
and M.T.Tuley, Artech House, Inc, Norwood, MA, USA. http://www. artechhouse.com
Magnetic absorbers consist chiefly of ferrites and carbonyl iron
- a form of pure iron powder. These materials are loaded as fillers in
a flexible matrix consisting of elastomeric polymers such as
polyisoprene, neoprene, nitrile rubber, silicone, urethane and fluoroe l a s t ~ r n e r s In
~ ~order
~ ~ ~ .to achieve the required permeability
characteristics, thickness and magnetic properties of these materials
are controued. This enables "tuning" to achieve the desired loss factor
and impedance. Magnetic absorbers are generally thinner by a factor
of about ten than dielectric absorbers for the same frequency range.
Reduction in reflectivity can be of the order of 20-25 dB (99-99.7%)
absorption for material tuned to one or two frequencies. Broadband
attenuation can be of the order of 12 dB (95%a b s o r p t i ~ n ) ~ ~ ~ ~ ~ .
Microwave Camouflage
Magnetic absorbers can be obtained by spraying or brushing.
Required thickness can be obtained by depositing several thin layers.
Such materials are used for reducing RCS due to travelling and
creeping waves. Such magnetic paints can be used to cover irregular
surfaces. Above the Curie temperature (usually 500 - 1000°C)the
magnetic properties deteriorate. Ferrite materials are sintered in
the form of small rigid tiles. Proper bonding techniques must be
employed to fix them on the surface of targets.
These materials, although heavier, give good performance a t
lower frequencies a t reasonably small thicknees.
Analogous to dielectric Salisbury screens, magnetic Salisbury
screens can be designed, but adjusting the values of permeability is
rather difficult. Sintered ferrite magnetic absorbers can be used
even above 1000°C. In general, ferro-magnetic materials can be
constructed with Curie temperatures in the range 500- 1000°C but
they pose serious problems of chemical stability. Multilayer magnetic
absorbers which can work in the frequency range 1- 15 GHz can be
constructed in four layers with a maximum thickness of 7.5 mm.
6.8.3 Radar Absorbing Structures (RAS)
So far, we have discussed materials which are required to be
applied to the surface of the target in order to impart radar absorbing
properties to it. That is, we make the assumption that the structural
material of which the target is made has no radar absorbing
properties. Mow we shall discuss materials which have radar
absorbing properties and which can be used a s structural materials,
so that there is no additional weight for the target.
In general, the less dense the material employed, the lower the
radar reflectivity. Radar absorbing properties can be imparted to
the target through mechanical design of the composite structure.
These are known a s Radar Absorbing Structures (RAS). One such
structure has a surface made of quartz glass, fibre glass or aramid
fabric reinforced plastic composites. The matrix resin can be loaded
with a lossy material or with fillers to control its electrical properties
and/or surface impedance in conjunction with a separate dielectric
or magnetic absorber, the thickness of which is integrated into the
structure. Carbon fibre is used a s the backing structural material.
These composites are available a s prepregs which are then moulded
to the required shape/contour. The structures made out of fibre
reinforced plastic composite materials are light in weight besides
possessing high ~ t r e n g t h Also,
~ ~ , ~single
~ . skin absorbers with metallic
mesh materials can be made. In these a specific thickness of a
221
222
Introduction to Camouflage & Deception
dielectric layer separates each metal fabric layer. Nippen Electric
Company (NEC)manufactures a product which absorbs radar energy.
It consists of multiple layers of a stainless steel wire and polyethylene
fibre woven f a b r i ~ ~ ~ , ~ ~ .
Carbon fibre reinforced plastic material h a s been used
extensively a s a structural material in B-2 B0mbe9~.It provides
high tensile and compression strength and stiffness resulting in
reduction in weight. It can take any complex shape which satisfies
aerodynamic charateristics as well as RCS reduction charateristics.
Required complex shapes can be obtained by moulding the resin
matrix composite prepregs. Further, composite structures possess
the advantage that they are cost-competitive with metallic parts.
6.8.4 Circuit Analog Absorbers (CAs)
Circuit analog absorbers are discussed a t length by Knott, et
aP5.Unlike the continuous resistive sheets of Salisbury screen and
Jaumann absorbers, conducting material is deposited in geometrical
patterns such a s dipoles, crosses, triangles etc, as shown in Fig
6.2625.For such absorbers the term Circuit Analog Absorber (CA)is
used, a s the properties of these patterns are expressed in terms of
resistance, reactive capacitance and reactive inductance. Further,
the design and analysis of these absorbers involve equivalent circuit
techniques. The design of circuit analog absorbers is related to that
of band-pass or band-stop surfaces. The latter are frequency-selective
surfaces (FSS)which do not absorb RF energy.
The design of CA involves:
(i) Calculation of admittance values for each layer of CA as a
function of frequency;
(ii) Aniving a t a geometry and conductance combination which
matches with admittance value of each layer. Depending on the
size and spacing of the elements the geometry is specified;
(iii) Calculation of the performance of the design at the admittance
values arrived at; and
(iv) Repetition of the process till all the parameters are optimised;
Compared to Salisbury screens or Jaumann absorbers, the
tailoring of the admittance properties of CAs can be better done and
better performance can be achieved. But optirnisation of the variables
controlling the admittance properties is rather complicated and
involves use of sophisticated computer programmes.
Microwave Camouflage
(a) Strips~Wires
(b) Intersecting Wires
(d) Crossed Dipoles
(e) Dual Period Strips
(c) Dipoles
(f) Jerusalem Cross
Figure 6.26. Circuit analog element geometries.
Source:
Reprinted with permission from Radar Cross Section by E.F. Knott, J.F. Shaeffer
and M.T.Tuley, Artech House, Inc, Norwood, MA, USA. http://www. artechhouse.com.
The substrate material normally consists of polyimide (Kapton]
film39.The geometric shapes have complex patterns. The electric
properties (dielectricconstant, loss factor) of the various layers cater
for different frequencies of the band. The multiple layers catering
for different frequencies are spaced at h / 4 to obtain broadband
properties. The electrical properties vary progressively through the
entire thickness of the absorber (as in the case of broadband
applications).
6.8.5 R-Cards
R-Cards 25,39 are basically resistive thin films and fabrics. These
films are made of gold, copper or nichrome with a dielectric substrate.
The thickness of the metal film is less than a micron.
When the surface resistance of these absorbers varies along
the length of the film it is known a s linear R-card. If the resistance
varies radially, it is known a s radial R-card i.e. the R cards have
gradient resistivity coatings which are either deposited in varying
thicknesses and/or varying composition such that the resistance
can vary from 0.2 to 3000 ohms per square depending upon the
specific design. Depending upon the contour of the surface (say, an
223
224
Introduction to Camouflage & Deception
aeroplane surface) the surface resistance can be made to vary in
several ways. The variation of resistance can be made quadratic,
cubic, exponential, or logarithmic. Supposing that the alsorber is
applied on the leading edge surface of a n aeroplane wing, the
minimum surface resistance will be a t the tip of the leading edge,
and then the surface resistance increases systematicallyas it extends
from the edge. This RAM design caters for different angles of incidence
of the incoming radar signals striking a t various points of the aircraft
surface.
6.8.6 Passive Cancellation
Passive cancellation, in principle, involves cancelling a n echo
source in the object with the help of another echo source whose
amplitude and phase have to be adjusted accordingly. In practice
this is very difficult. Reduction can be accomplished at one frequency
only. Actual targets which are very big in size may have several
echo sources running into dozens. A small change in viewing angle
or frequency may satisfy the condition for reinforcement instead of
cancellation. Hence this method is not being adopted in practice
generallyz5.
6.8.7 Active Cancellation
Active cancellation, in principle, involves emission of a signal
by the target whose amplitude and phase cancel the reflected energy.
The target must be able to follow carefully the arrival of the incident
signal with respect to its angle of incidence, intensity, frequency
and wave-form. It is a very difficult task and it is not known whether
it is being used anywhere25.
6.8.8 Current Research on Radar Absorbing Materials
It has been reported that conducting polymers have high
potential a s radar absorbing materials. Retynl Schiff base salt is a
recently developed RAM coating. It is reported that it can reduce
radar reflectivity by 80 percent. These materials are discussed in
the chapter on camouflage materials.
There is a requirement for thin broad-band absorbers. Materials
which are based on purely dielectric loss are thick for low frequency
applications. Materials which are based on magnetic losses alone
are quite effective a t low frequencies. A hybrid RAM might make use
of a suitable combination of dielectric, magnetic and circuit analog
absorbers.
REFERENCES
1. Gardiol, F. Introduction to microwaves. Artech House Inc.,
Dedham, 1984.
Microwave Camouflage
Cook, N.P. Microwave principles and systems. Prentice-Hall,
New Jersey, 1986.
Microwaves made simple: principles and applications. Edited
by Cheung W.S. & Levien F.H.. Artech House Inc., Dedham,
1985.
Hall, P.S.; Garland-Collins T.K.; Picton R.S. & Lee R.G. Radar.
Brassey's, UK, 1991.
Skolnik M.I. Radar handbook. (Editor-in-Chief) McGraw Hill.
Inc., USA 1970.
Skolnik M.I. Introduction to radar systems (Second Ed.) McGraw
Hill Book Co. 1981.
Rodgers, A.L; Fowler I.B.R. ; Garland-Collins T.K.; Gould, J.A,
James G.A. & Roper, W. Surveillance and target acquisition
systems. Brassey's Defence Publishers, 1983.
Bhartia P. & Bahl I.J. Millimeter wave engineering and
applications. A. Wiley Inter-Science Publication, John Wiley and
Sons, 1984.
Winderman J.B. & Hulderman G.N. Solid state millimeter
wave pulse compression radar sensor. Microwave J.,20, 1977
(1I), 45.
Long M.W.; Rivers W.K. & Butterworth J.C. Combat surveillance
radar AN/MPS-29 (%E-1).Sixth Tri-Service Radar Symposium
Rec. DARPA Publications, 1960, p. 230-44.
Dyer, F.B. & Goodman(Jr) R.M. Vehicle mounted millimeter
radar. Eighteenth Tri-Service Radar Symposium Rec., DARPA
Publications, 1972, p. 473-95.
Long M.W. et al. Combat surveillance radar. Final report on
contract DA SC-74870. Georgia Institute of Technology, 1960.
Holm W.A.; Foster W.S & Loefer G.R. Combined electro-optical/
millimeter wave radar sensor system. DARPA Tri-Service
Millimeter Wave Conference, 1977, p 94-103.
Hair T. Battlefield surveillance. Proceedings of the military
microwave conference. microwave Exhibitors and Publishers
Ltd., Kent, UK, 1980, p 281-291.
Barret (Jr)C.R. & Ryan D.A. Surveillance and target acquisition
radar for tank location and engagement (STARTLE).Proceedings
of the Military Microwave Conference. Microwave Exhibitors &
Publishers Ltd., Kent, UK, 1980, p 1-8.
Layman G.E. SEATRACKS - A millimeter wave radar fire control
system. IEEE LASCON - 78 Res. 1978, p. 2 11-16.
226
Introduction to Camouflage & Deception
Holmes T.R. & Flick E.A. A millimeter wave radar for the
US army helicopters in the 80's. IEEE Proc, NAECON-80. 1980,
2, p. 712-716
Kosowsky, L. et al. A millimeter wave radar for the mini-RPV.
AIAA/DARPA Conference on Smart Sensors. November 1978.
Wagner R.H. et al, Millimeter wave radar for RPV applications.
Presented a t the twenty third annual Tri-Service Radar
Symposium, July 1977.
Pearce R.H. et al. 3.2 millimeter surveillance radar for the US
army mini RPV. Presented a t the AGARD AVPjGCP Joint
Symposium Avionics/Guidance and Control for RPV's
Symposium. October 1976, Florence, Italy, 16, p. 16-20.
Lynn, V.L., HOWLS radar development.AGARD AVP/GCPJoint
Symposium Avionics/Guidance a n d Control for RPV's
Symposium. October 1976, Florence, Italy, Paper no. 31.
Novak, L.M. & Vote F.W. Millimeter airborne radar target
detection and selection techniques. IEEE Proc. NAECON-79.
1979, 2, p. 807-817
Hofhnan L.A. et al. A 94GHz radar for space object identification.
IEEE Trans. Microwave Theory Tech. Dec 1979, MIT-17 (12),
p. 1145-49.
Dybdal R.B. Millimeter radar application to SOI. IEEE EASCON77 Rec., 1977, p. 16-4A/ 16-41.
Knott, E.F.; Shaeffer J.F. & Tubey, M.T.Radar cross section its prediction, measurement and reduction. Artech House, Inc.,
Nonvood, Book M a r t Press, Inc. North Bergen, N J 1985.
Stonier R.A. Stealth aircraft and technology - World War I1 to
the Gulf War SAMPE Journal, 1991 , 2 7 (4) p. 9-16.
Mentzer J.R. Scattering and diffractionof radiowaves. Pergamon
Press, New York, 1955.
Stratton J.A. Electromagnetic theory. McGraw Hill Co, New York,
1941.
Richmond J.H. Digital computer solutions of the rigorous
equations for scattering problems. Proc. IEEE, Aug 1965, 53,
p 796-804.
Spencer R.C. Back scattering from conducting. Air force
Cambridge Research Lab Report, E5070 April 1951.
Crispin, (Jr)J.W. & Siege1 K.M.Methods of radar cross section
analysis. Academic Press, New York, 1968.
Keller J.B., Geometrical theory of diffraction J. Opt. Soc. Am.
1962, 52, 116-30.
Microwave Camouflage
33. Electromagnetic and acoustic scattering by simple shapes.
Brown J .J,Senior T.B.A. & Uslenghi P.L. (Eds) North Holland,
Amsterdam, 1969.
34. Senior, T.B.A., A survey of analytical techniques for radar cross
section estimates. Proc. IEEE, -pug 1965, 53, 822-33.
35. Rheinstein J. Backscatter from spheres: A short pulse view.
IEEE Trans, Vol AP-16 1968, Jan. 89-97.
36. Ross, R.A., Radar cross section of rectangular flat plates. IEEE
Trans., May 1966, Vol AP-14,329-35.
37. Jones J. Stealth technology: the art of black magic. Edited by
Thurber, M. AERO, A Division of TAB Books Inc., Blue Ridge
Summit, 1989.
38. Bessi, F. & Zacca, F. Introduction to stealth. Military Technology,
MIL TECH 5/ 1989.
39. Stonier R.A. Stealth aircraft and technology - World War I1 to
the Gulf-Part 11. Applications and Design, SAMPE Journal, 1991,
27 (5).
40. Foxwell, D. Stealth-the essence of modern frigate design.
International Defence Review, 1990,9, p. 984-94.
41. Amin, M.B. & James, J. R.. Techniques : for utilization of
hexagonal Ferrites in Radar absorbers (Part I) Broadband
planar coatings. The Radio and electronics engineer. 1981,
51(5),209-18.
227
DECEPTION
7.1
INTRODUCTION
Deception, similar to camouflage and concealment, is new
neither in nature nor in war. For self-preservation, whatever means
that the prey and predator adopt, in defence and offence, let it be
camouflage or concealment, or any other means such as mimicry,
deception is inherent. In the progress of biological evolution, there
is an evolutionary arms race, in which deception is invariably
employed as a means in strategies and counterstrategies-the
predator while on the lookout to locate and capture its prey, and
the prey while it is constantly on the alert to avoid recognition and
capture1.
Human civilization, too, beginning with the primitive man,
has been using deception in various forms for different purposes.
Particularly in wars, deception has been in vogue from ancient
times. In the words of Sun Tzu (500 BC) - The Art of War, "All
warfare is based upon deception; when able to attack, we must
seem unable, when using our forces, we must seem inactive, when
we are near, we must make the enemy believe that we are away,
when far away, we must make him believe that we are near. Hold
out baits to entice the enemy. Feign disorder and crush him2s3t4.
The basic philosophy remaining one and the same, the changes
that have come from olden times to these modem times are in the
methodology of application and the levels of sophistication of the
means of deception- from the torch light decoys to the TacticalAir-Launched Decoys (TALDs); from the Trojan Horse to the
Tomahawk.
During the American War of Independence, in late 18th
century5, the British troops who used to dress in bright red coats,
because of which they were nicknamed "Red Coats", were
conspicuously visible in any background, thus becoming easy
targets to American riflemen. But on realising this, they changed
their dress to buck-skin which was not spotted in the background.
230
Introduction to Camouflage & Deception
In the first World War, khaki and grey had become standard
colours of clothing outfits. This ruse was picked up from the Afghan
war of 1880, where the Afghan soldiers wore khaki uniforms which
blended well with the barren muddy countryside. Khaki is the Urdu
word for dust-coloured3.
The Britishers during the North Africa Campaign5 had learnt
the benefits of deception for better survival. They had developed the
technique of blending into the background of foliage by attaching
pieces of hessian strips and artificial foliage on their helmets and
weapons. These techniques were incorporated into the World War I1
operations3. The Americans, on the other hand, because of their
better mobility and superior fire-power and material resources,
considered deception an unneccessary subtlety. But the deception
operations were too successful to be ignored for long and the
reluctance gave way to full acceptance, and the US Army became
quite proficient in deceptive arts by the end of World War 11. Their
techniques have evolved into a highly effective combat multiplie9.
In the Falkland campaign in 19825, the British commanders
were misled into believing that the Argentinian airfield at Portstanley
was damaged and rendered unservicable by bombardment.
Reconnaissance pictures showed bomb craters which supported
this view. But it was discovered only much later that the entire
operation was a deliberately planned, and effectively executed,
deception exercise. Early every morning, the otherwise normal and
undamaged runways were covered with heaps of mud in bombcrater like appearance, by a gang of labourers. At dusk they would
clear all this mud and make the runways operational for supply
aircraft to use them through the night cover, without being detected
by the enemys. In another example from the Falkland campaign,
the British naval aircraft carrier HMS Hennes survived a missile
attack by an Argetinian missile-carrying aircraft Super Etendard.
The Exocet missile fired at Hermes was successfully diverted when
the missile radar seeker got confused by the chaff decoys deployed
by the warship. On the other hand, another warship, Atlantic
Conveyor, which had not deployed the chaff decoys and was in the
near vicinity of Hermes, got struck by the missile6.
The Soviet Union had made deception a formal part of their
war doctrines, even before World War 11. Maskirovka is a well
documented Soviet deception doctrine. The man behind its
development was General Ogark~v'*~*~.
Applications of deception techniques in all their subtlety and
sophistication peaked during the 1991 Gulf War. The technically
developed and heavily resource-backed Allied Forces brandished
advanced decoys and deception equipment. The Iraqis effectively
displayed deception with relatively simpler techniques.
Deception
Winston Churchill during World War I1 had stated: "In War,
truth is so precious, that it should always be attended by a body
of lies"lO.Immediately following World War I1 Gen Dwight D
Eisenhower admonished the American Army to remember the
important role that deception played during the war ".... no major
operation should be undertaken without planning and executing
appropriate deceptive measuresu3.
One of Britain's most experienced deception planners, Brig.
Gen Dudley Clarke, who was head of the 'A' Force - a deception
planning team-when planning with Gen Wave11 an attack against
the Italians, had expressed a creed that they always followed: "what
do you want the enemy to do; not what do you want him to think."2
7.2
WHAT IS DECEPTION?
A s applied to war, deception is a deliberate and rational effort
to mislead the adversary by manipulation, distortion, or falsification
of evidence to induce him to react in a manner prejudicial to his
interest and/or to the benefit of the deceiverl1J2. Deception may
also be defined a s a technique that leads to surprise which enables
the deceiver to take advantage of the enemy's weakness and
overcome his strength.
Throughout history deception has been employed not only to
deceive enemy battle-field commanders, but also the highest
ranking enemy policy makers.
Deception has several facets. These are:
Camouflage and concealment;
Deception equipment in the form of dummies, decoys
feints, and ruses;
Disinformation.
Before proceeding further, the last facet 'disinformation' may
be elaborated upon a little.
7.3
DISINFORMATION
Disinformation is spreading false information carried out
openly or secretly. The intention of the disinformer is to alter the
perceptions or the behaviour of the persons on the receiving side.
The ultimate function of disinformation a s applied to defence is to
affect the decision making in a manner favourable to the
disinformer.
Diversion is another term employed by the military which
involves diverting the enemy's attention away from the location of
main operation. A s applied to movement of troops, by diversion is
meant the act of altering the precribed route to reach the destination.
231
232
Introduction to Camouflage & Deception
Research has been carried out on psychological aspects of
disinformation with the objective of neutralising or minimising the
adverse effects12.
The Soviets considered 'Maskirovka' their doctrine of
deception and disinformation3. It is an active continuous process
of encompassing demonstrations, feints, camouflage imitation and
false information. Its main objective is to convince the enemy about
events and activities which in reality are not there. Interestingly,
the Soviets considered 'Maskirovka' important not only to warp
the enemy's perception of Soviet positions, intentions and missions,
but also, because of Soviet penchant for secrecy, they wanted to
alter the perceptions of their own units and clients as well. The
Soviets considered successful deception a s contingent upon
surprise.
7.4
PSYCHOLOGICAL AND GENERAL ASPECTS OF
DECEPTION
Deception is false presentation and false propaganda. A
psychological coloration to a deception effort can very positively
help in toning it up to influence the adversary, mind, to induce
him to a reaction which puts him into a disadvantage1&12.
In his 'Art of War' treatise referred to earlier, Sun Tsu stressed
the importance of manipulating the human mind and behaviour
in times of crisis and war. In the 20th century, deceptive psychology
has been used systematically as an important new discipline in
war.
Some key factors from the psychological perceptive that can
affect the accomplishment of the overall deception mission are
mentioned below.
The mind to a very great extent relies upon preconceived ideas.
The brain accumulates a database of hypotheses. The mind is
gratified by evidence that confirms its preconceptions and thinking
attitudes. In other words, the mind believes what it wishes to believe.
The mind tends to dislike confusing and ambiguous
situations. The effort and the resulting stress is to resolve
uncertainities, and, especially under battle pressures, as quickly
as possible. This can lead to jumping to conclusions.
The tendency is to allocate priority to anything new or different
or interesting, and shift to the rear anything of routine nature.
Surprise, when thrown in, can catch the attention with more
certainity than anything else. Routine dulls the senses and one
may not spot marginal or gradual changes.
Deception
Credibility of a particular line of thought is enhanced when
the illusion or ruse is seen from more than one source.The greater
the sources or opportunities the mind has to 'see' the proposal,
the more convinced it will become.
In a reduced fidelity simulation, the more prominent or
pronounced ploy registers better on the mind, making a greater
influence on it.
Thus by knowing what attitude the mind can take, under
differentcircumstances, the necessary stimuli can be tailored and
toned to influence the mind in the required direction.
Deception has been exhibited in all battles from World War I1
such as Operation Fortitude, Barbarossa, Battle of Alamin and
the Tobruk Offensive of 194112.
In situations where camouflage and concealment by any
possible means are not effective, or not practicable, deception
has to be employed. The fundamental characteristics2 of deception
are:
It is low in cost;
It confuses the enemy resulting in prolonging his
indecisiveness;
It tends not to destroy, but it tends to save both assets and
lives. It is therefore significantly nonlethal warfare;
It enhances your ability to survive;
In combination with secrecy and integrated effort,it becomes
a force multiplier.
Although initially deception in the battlefield was existing more
as a military art than science, today in the modern war, with the
advent of high technology multispectral sensor systems deployed
in a variety of platforms including satellites, deception has become
a technology in its own right. It deals with development of dummies
and decoys. Principally the role of deception equipment is that
they become force multipliers, thereby enhancing the force's ability
to survive. Deployment of deception equipment weakens the
strength of the enemy, by offering more targets than those that
actually exist, distracts the attention of the enemy and fire away
from essential installations, and deceives the enemy a s to the
identity, strength, intention or degree of activity in an area.
7.5
DECEPTION EQUIPMENT
The most important facet of deception is deception equipment.
A plethora of equipments are being developed for use as deception
devices. These devices based upon their different characteristics viz, physical dimensions, emissions, deployment etc-may be
classified into different types or groups.(Table 7.1)
233
234
Introduction to Camouflage & Deception
Broadly they may be classified into two types: Dummies and
decoys.
Table 7.1. Classification of deception equipment
Main types
Subtypes
Activity classification
Signature-wise
classification
With respect to
Dummies
3-dimensional
Z-dimensional
Passive
Mp~k-ups
Non-expendable
Decoys
One dimensional
Active
Monospectral
Bispectral
Multispectral
Polyspectral
Expendable
7.5.1 Dummies
A dummy displays all the external visual features of a military
object with regard to shape, solidity, and size. But it cannot perform
the various functions of the object it depicts. A dummy is generally
ground-based. It is usually stationary or static. Any movable type
is mobile, not so much from the point of depicting motion of the
actual object, but from the point of facilitating change of deployment
position or location over short distance.
A dummy of this kind possesses all the optical (visual)
characteristics of the original object, and, therefore, when viewed
through sensors in the visible region, it can be mistaken for the
original object. This type of deception equipment may therefore be
classified as 3-dimensional (3-D) dummies with monospectral
simulation (visible region only).
However, in the present day war scenario of multispectral
surveillance, sensors in the infrared and microwave regions can
detect the monospectral (visual)3-D dummies a s false. It therefore
may become necessary to simulate in the 3-D dummies, besides
the signature in visible region, the infrared and/or microwave
s i g n a t u r e s also. S u c h d u m m i e s may be designated a s
multispectral.
Besides the various types of electromagnetic signatures the
military object may have other types of signatures such a s acoustic,
seismic, electric and magnetic. In specific situations, some of these
additonal signatures may also have to be incorporated in the
deception equipment. Such types of devices may be classified as
polyspectral.
Thus the larger the simulation bands in a deception device,
the more difficult it becomes to discriminate it Erom the original
Deception
object even by multispeotral sensor systems. The larger number of
cues combine to support as well as strengthen one another to
enhance credibility of the device.
Dummies are deployed generally in numbers to depict a
tactical manoeuvre to deceive surveillance efforts of the adversary.
They are designed to be used a number of times and are therefore
categorised as non-expendables.
Wherever IR signature simulation is effected through
conversion of some energy into heat, e.g. fuel burning or electric
heating, the deception device becomes a n active system.
Dummies are mostly land-based and a big object such a s a
ship may not have 3-dimensional dummies deployed on the sea.
7.5.2 Decoys
In general, in a decoy, only the most prominent signature of
the object by which it is detected, depending upon a particular
war situation, is simulated. A decoy of a military object does not
possess the visual external appearance of the original object. Thus
it oan be detected by the sensors of the regions other than that
which it is simulating. An obvious consequence of this detection is
a countermeasure reaction directed against the decoy. Therefore,
decoys are, by and large, not static but are mobile, and move in a
manner to depict the motions of the original target object, thus
offering themselves as a more realistic bait and a t the same time
executing evasive countermeasure tactics.
Again, decoys are carried in suitable numbers on the parent
object which is meant to be either protected or is the launch
platform. Because of this reason, as well a s the preceding one, a
decoy is of a fractional size of the original object.
An infrared decoy may merely consist of a strong source of
heat having the IR spectral characteristics of the original object. In
a microwave decoy, only the microwave signature of the object is
simulated by very much smaller sized corner- reflectors giving
intense reflected returns to match the original radar cross-section
of the object. Another example is that of a noise-generator decoy.
Its physical size is totally insignificant as compared to the bulk of
the object it protects, i.e. a ship. Such types of decoys that have
practically insignificant dimensions, a s compared to the (parent)
object they protect, can be categorised as one-dimensional (1-D)
decoys.
Also, since each of the above examples of decoys is having
signature of only one particular region of the signal spectrum, they
can be grouped as monospectral.
235
236
Introduction to Camouflage & Deception
The IR decoy produces its own IR signature by burning its
pyrotechnic material. The noise generator produces its own acoustic
signature. Such types of decoys that generate their own signals
are designated a s active decoys.
Most decoys are active a n d consume their resources of
signature simulation energy. They have only one-time deployment
capability and they are therefore categorised as expendable.
In naval defence, mostly against antiship missiles that may
be air-launched or sea-skimming, certain off-board decoys are
used. These are categorised a s soft-kill decoys13- resorting to active
jammers, generating noise or signals to deceive or distract the
incoming missile sensors and inducing them away from the ship
target so that the missiles go waste. The noise generators may be
in the form of IR flares or microwave chaff dispensers. Hard-kill
decoys are designed to engage the incoming missiles and destroy
them; they may be in the form of antimissile missiles, or radar
controlled rapid fire guns. The former systems have greater
advantage over the latter, of being very low cost and engaging much
less ship installation area.
Though IR flares a n d chaff dispensers are individually
monospectral decoys, sometimes, they are used together in colocated efforts to cope effectively with multispectral sensors in
missile-seeker heads.
7.6
CANDIDATES FOR DUMMIES AND DECOYS
In any battle, the most frequent and susceptible targets for
the enemy are objects that are most exposed or vulnerable to attack
by the adversary. This number for such targets becomes fairly large,
when we consider the various objects deployed in different theatres
of war-land, air and sea.
These objects may be directly involved on the battlefronts or
indirectly involved a s battle support effort on the rear. This
prohibitive number can be short-listed by considering only those
objects which, under the prevalent war scenarios, are critical or
sensitive. The former, of course, takes priority over the latter.
In order to gain full advantage from deception under any
tactical situation, the defence forces must be involved with it from
the earliest stages of both planning and preparation-in other words
possess "deception preparedness". Candidates for dummies and
decoys must be identified and devices made ready and stocked,
and training and deployment expertise imparted.
With regard to dummies, considering the three forces, from
the point of view of their different functions, their different war
Deception
237
approaches and battle scenarios, they are used to the maximum
by land forces. In the case of the navy, because of its formidablesized systems like ships and submarines, the use of l ~ o k - ~ k e
full-sized deception equipment is neither economical nor practically
feasibleldesirable.
When we consider decoys, it is found that all the forces have
abundant use of these devices, with the navy taking the lead in
variety a s well a s applicaton.
7.6.1 Criteria for Selection
In picking out candidates for dummies and decoys certain
general criteria14 may be used, However, specific situational
considerations may need to be applied for different scenarios/
circumstances.
The criteria can be categorised under two main groups i.e.
general criteria which consider operational situations, and sensorspecific criteria which deal with behaviour of the target in the
electromagnetic regions. Each of these categories is further
subdivided - the general criteria on the basis of the target
situational parameters, and the sensor-specific criteria on the basis
of different regions of the electromagnetic spectrum a s well a s
acoustic and seismic regions. Again, each of these sub-divisions
can be further split into three groups, each depending upon the
state or intensity of each parameter. These are high, medium and
low. The first-high-deals with signature strength or the quantity of
details enough to identify the target; the second medium-is lower
in details and can indicate target recognition and the third low-is
still lower and may indicate only u p to detection level.
The above details are shown in the from of a chart below :
Salient points of t h e operational parameters a n d the
vulnerability to detection by surveillance or acquisition by a weapon
sensor will be discussed in brief.
7.6.2 General Criteria
Size and number : Physical aspects i.e. dimensions of length,
width and height;
Operational aspects: Number deployed on battlefield, spread and
orientation;
This determines the vulnerability of the target
Location
to ground or airborne surveillance, e.g., the
front line locations are vulnerable to both
ground and air sensors;
I-
1
I
,
I
7
>
,/.'
I
High
Location Mobility Detection
I
-
Size
artillcry, short range sensors
Vulnerability &
Detection value
Activity
Operation"
1
Visual
.L
aircraft, long range sensors
Acoustic
seismic
- -
/"
Detection
1
Radar
Sensor-spccific -
Laser Infrared
4
Surveillance
Recognition
Medium
Association
Criteria for dummies and decoys
t
1
I
!
,
t
c.
0
Go
@
mb
%
0
3
0
CI
0"
Deception
Frequency of movement during normal field
operations;
high - e.g. tank company
medium - e.g. medium guns battery
low - e.g. tactical headquarters
: Degree of accuracy by which targets are
Detection value
acquired or engaged;
Targetting:
When within artillery range and short range
missile system;
: Through aircraft and in the range of long
Surveillance
range missile;
: These signatures refer to the signatures due
Associative
signatures
to general activity or situation. These are
different from electromagnetic and nonelectromagnetic signatures of the targets.
Examples a r e g u n flashes a n d track
markings. They are classified a s high; if they
a r e total giveaway, giving reliable cues
medium which need to be confirmed and;
verified, and low if only suggestive of certain
equipment/deployment.
7.6.3 Sensor-Specific Criteria
These relate to signatures of the electromagnetic spectrum
and can be categorised into five different kinds.
Visual vulnerability
The detection prbbability, aided or unaided, is dependent on
shape, size, hue, colour contrast, mobility:
High -. locations near the forward edge of battlefield area
i)
(FEBA); here visual surveillance is maximum; movement is
also frequent.;
ii) Medium - direct ground observation stand-off aerial sensors;
iii) Low - subject to only long range airborne reccee; blending
with background is high.
Infrared detection vulnerabiliity
Very-short wave infrared (VSWIR)- detection is by imaging
systems :
High - operation zone near FEBA, within short and medium
line of sight, contrast from background is sufficient to afford
detection;
Medium - within line of sight range, signature images are not
very distinct;
Long - outside the range of VSWIR sendors.
Mobility
:
239
240
Introduction to Camouflage & Deception
Medium wave (IRj detection is by uncooled or moderately cooled
IR detectors of very hot sources and hot spots, target self-emissions,
applicable in seeking and homing devices. The high, medium and
low groupings are similar to the' ones mentioned above.
Long wave (IR) - detection is usually by cooled detectors (liquid
nitrogen cooling), of surface emittance, thermal lag and inertia.
The resulting imagery of thermal signature gives sufficient details
to detect and identify targets.
Laser detection vulnerability - degree to which surface
characteristics s u c h as skin or coatings composition and
roughness, aspect angle and contrast with background provide
laser reflectivity of useful quality capable of being received and
analysed by sensors
High - significant amount of energy is reflected and detected;
Medium - reduction of reflectivity a t particular wavelength;
Low - minimum reflectivity from the target.
Radar detection vulnerability - magnitude of target scattering cross
section a n d the signature relative to background, based on
combination of size, configuration and metallic components:
High value - ideal reflectivity characteristics e.g. tactical bridges;
Medium value - reflectivity sufficient to require further investigation
e.g. a medium gun battery;
Low value - reflectivity low enough to blend with normal
background, e.g. Infantry Brigade.
Acoustic and seismic vulnerability - detection by acoustic and
seismic detectors, transmitted vibrations to air or groundmagnitude, characteristics, shape, duty cycle:
High - large impulses delivered to air or ground near forward edge
of battle area (FEBA);
~kdium
- smaller vibrations or vibrations emitted at longer range;
Low - unidentifiable characteristics, or out of range of sensor
systems.
All the above criteria form the basis of analysis for classifying
targets. One has to use discretion in the selection of the important
targets so as to keep the numbers reasonable and manageable.
Also, mission-associated conditions and characteristics e.g.
location on battlefield, type of material employed, mobility,
resources available for the extra effort needed, including logistic
support with respect to place and operational constraints, have all
to be given proper weightage.
Deception
7.7
BACKGROUND FOR AN EFFECTIVE DECEPTION
STRATEGY
The enemy, through his strategic reconnaissance facilities,
collects information on his adversary in good time and builds u p
his data bank. Through his tactical reccee systems, he acquires
information needed towards a n imminent battle action.
The basic purpose of both types of reconnaissance is to gather
information regarding the following - time, location, kind, number
and activity.
With regard to this information gathering effort by the enemy,
if we can find answers to some pertinent questions, listed below,
we shall be in a position to plan out an effective deception scheme
or strategy to deny the adversary the correct information or feed
him with disinformation.
Some pertinent questions as given by Savoie in his pape?
are:
What are my high signature items from enemy's point of
view?.
What methods should I use to deny these signatures to the
enemy e.g. camouflage or deception techniques?
What signals and when should I send to the enemy to enhance
the deception ruse?
What is the enemy's decision making time and what is his
reaction time required to respond to my signals?.
Has he received the signals a s per my plans and strategy?
How and a t what levels are deception plans to be linked with
other u n i t s or the exercise integrated in a joint a n d
coordinated plan ?
Our effort and accent should be to gather information on the
enemy's likely course of action and adjust the deception plan, if
possible, to the enemy's momentum of planning, direction and
tactics, thereby convincing him that his predetermined course of
action is the proper one. We can thus with greater certainty and
speed line him into our deception trap.
7.8
DUMMIES/DECOYS OF MILITARY OBJECTS
Of the various military objects, the major items that need
deception equipment are tanks, aircraft, ships and submarines.
Majority of the deception equipment reported in literature are
decoys of expendable type. Non-expendable types such a s 3-D
dummies are intended for military targets in a static position.
241
242
Introduction to Camouflage & Deception
7.8.1 Dummies and Decoys of Visible Region
Deception devices in this region, because of the high
discriminating and resolving power of the optical instruments being
used a s sensors and surveillance devices, must imitate the original
objects not only in correct size and shape, but also in the display
of necessary smaller details, like surface clutter fitments, contours
of prominently exposed surfaces, shade and shadow effects, texture
of the skin surface, and visual reflectances from acute sighting
angles.
With all these details to be considered, the dummies tend to
become operationally and logistically somewhat cumbersome. But
the need for surface details clutter can be considerably reduced
by providing camouflage cover through artificial means such a s
nets or masks, or natural means such a s foliage or dunes. Means
of erecting and dismantling m u s t be simple a n d not timeconsuming. The dummies must be easily transportable from place
to place and the individual parts must be stackable and must not
occupy large volume or space. They should be light and strong
and stable against high velocity winds. Their economics is an
important criterion.
7.8.2 Decoys (IR & Radar)
The major expendable decoys are chaff and IR flares. The
former mimics the RCS of the military object concerned and
becomes the virtual target to a radar-guided weapon, the latter
mimics the hot spots of the military object concerned and offers
itself a s the target to a heat-seeking missile.
Chaff and IR decoys reported in literature are briefly discussed
in the following sections.
7.8.2.1 Chaff Decoy
Chaff is one of the commonest forms of decoy designed to
counter hostile radar system. The chaff decoy presents tracking
radars with a n alternative target with respect to that which they
are really seeking utilising homing radars which are mounted in
the nose of antiship and antiaircraft missiles.
ChaffIs consists of thousands of thin rods of conductive
material such a s aluminium, or metallised glass fibre rods, or silver
nylon monofilaments whose length is equal to half the wavelength
of the frequency at which the hostile radar is anticipated to will
operate. Each of the rods constitutes a dipole which reflects the
hostile radar pulse. These fibre rods may have diameter in the
range 0.5 - 2 -0mil and RCS varying between 0 and 0.866 m ZThe
RCS depends upon the view angle. The expected RCS averaged
Deception
over all viewing angles is 0.15 to 0.20, depending on the length-todiameter ratio of the dipole. The chaff must cover a broad band of
frequencies to provide effective cover. The alignment of the dipole
rods should be able to cater to counter horizontally polarised,
vertically polarised, as well a s circularly polarised transmissions
of the radar.
The maximum cross-section occurs a t chaff lengths that are
approximately integral multiples of one-half the illuminating
wavelength. Chaff may also be characterised by assigning an
average cross-section to it. The average is around the frequency
range a t which the peak cross-section occurs. The bandwidth is
normally 10-15% of the mid-frequency and the chaff is assigned a
cross-section of zero outside the bandwidth. Several millions of
individual elements are required to generate a chaff cloud capable
of producing a false target with a radar cross-section equivalent to
the target (if the target is a warship).
Chaff is dispensed in millions, in many methods ranging from
pyrotechnique to mechanical. Self-protective chaff is ejected from
cartidges containing a n explosive to effect rapid blooming. The
chaff expands to form a chaff cloud. It must expand rapidly so
that it presents a cross-section larger than the target. Blooming in
a time of the order of 50 ms may be required. As viewed by a radar,
the RCS of the chaff cloud will be nomally less than the physical
area viewed by it. The RCS presented by the chaff cloud depends
upon the number N of the chaff dipoles visible to the radar. It is
claimed that 1 lb (approx. 0.5 kg) of chaff will yield a 60 m2 target
at all frequencies over 1- 10 GHzL5.
If N represents the total number of dipoles in a chaff cloud,
and A, the physical area viewed by the radar, then the number of
dipoles per unit of the projected area (n)15is equal to
The RCS is given by
where u, = 0.15A2 (dipole cross section)
when n is large, noebecomes large, i.e. a becomes equal to A,. .
When n is small, nocis small, and
1-nu,so that
The efficacy of chaff depends on the environmental factors,
essentially wind. The slightest m o u n t of wind in the wrong direction
will begin to dissipate chaff cloud and nullify its effect. Taking wind
factor into consideration, chaff must be continually deployed.
243
244
Introduction to Camouflage & Deception
Chaff continues to be deployed in naval units16 and aircraft
with comparatievly low cost and simplicity. Chaff is a uniquely
versatile countermeasure; however its performance against
sophisticated electronic counter-countermeasures (ECCM) is
questionable13.
There are several modes by which chaff may be deployed.
Before the identification of target group occurs, i.e. in the initial
stages of engagement, confusion chaff clouds can be deployed from
a long range. Such chaff clouds present a multitude of decoys and
create confusion denying range and bearing information13.
Distraction chaff are deployed to distract the missile seeker away
from the true target when the missile is inbound. Seduction chaff
is deployed when a missile seeker has locked on to its target.
Accurate modelling of chaff behaviour is not a particularly
simple exercise. It is in this area that probably future efforts will
be concentrated 17.
The US Navy is researching and developing several new
materials for chaff, but the information is classified1'. Cheming
Ltd., Portsmouth, U.K. is studying the aerodynamic behaviour and
radar characteristics of existing and novel chaff materials1'. ML
Aviation UK has developed SUPER BARRICADE which uses the
latest chaff dispersion technology to create large, rapid blooming
chaff cloudslg. Loral Hycor Mk36 SRBOC (US)is a rapid blooming
decoy system. The MK36 is a family of mortar launchers deploying
chaff cartridgeslg. There are numerous systems available for
deploying chaff ranging from highly sophisticated systems such as
those developed by CSEE in France and Plessey Aerospace in UK
to very basic sys&ms such as those developed by wallop in the
UK20.
7.8.2.2 Infrared Flares
The increasing effectiveness of missiles equipped with infrared
seeker heads in the Falklands and the Middle East provided
impetus to intense development in infrared decoy^^'^^^. Infrared
decoys in the form of infrared flares are widely employed to protect
aircraft and ships against heat-seeking missiles.
The starting point in the design of an infrared flare decoy is to
have an assessment of the detection range of the threat missile
a n d t h e environmental characteristics. The important
characteristics of a flare decoy are: peak intensity, rise time, spectral
characteristics, function time, ejection velocity and aerodynamic
characteristics. All these have been discussed in detail by BruneZ2.
The cost of the decoy depends upon the number of characteristics
reproduced. An infrared decoy is basically an intense source of
Deception
heat and small in size, possessing radiation properties matching
with those of the military system to be protected.
The most important characteristic is the peak intensity22which
should be higher than that of the target to be protected in all the
threat bands. One typical example of a n IR flare of a conventional
aircraft consumes 0.5 to 1 MW of power for each 1000 W/sr of inband radiant intensity a t flight condition^^^. Rise time is the time
in which the radiant intensity reaches effective level. This should
happen before the decoy leaves the seeker's field of view. The is of
the order of a fraction of a second for a n aircraft decoy.
The heat required for most IR decoys comes from chemical
sources22.Appropriate spectral matching corresponding to threat
wavelengths must be accomplished. The flare will have the
maximum intensity a t the critical wavelength band.
The function time during which the decoy persists should be
long enough to ensure that there is no possibility of target
reacquisiton.
motechnic flares are used in aircraft IR decoys. These are
released whenever there is a cue from a missile warning system.
The main parts of a pyrotechnique flare22are a cartridge case which
is simply a cover for the flare, a n ejector charge which is a n
electrically initiated gun powder charge, a mechanism for initiating
the flare and a n end cap which serves a s a seal. Atomised
magnesium powder and poiytetrafluoroethylene (FTFE) resin are
used for accomplishing pyrotechnique reaction. In the case of a
flare for fighter aircraft, the rate of consumption of the fuel is more
than 100 g/s23.The performance of a flare is affected by wind speed
and altitude. The radiation intensity decreases a s the wind speed
increases. The burn rate becomes more and more complicated a s
the altitude increases.
The flare decoys are launched precisely a t a time and location
in such a way a s to maximise the threat miss distance. The flare
cartridges loaded into a magazine are dispensed, for example, by
a countermeasures dispenser. The dispensing rate is controlled
electronically and by computational algorithms.
Similar to IR decoys for aircraft, IR decoys are designed for
shipboard use. Most of the threat IR seekers employ mid-lnng
wavelength bands. The two bands of interest are 8-14 prn and 3-5
pm wavelength ranges. The contrast signature (with respect to the
surrounding sea) of a combat ship is less than 1000 W/sr in the
8-14 pm band. The signature level in this band, compared to that
of 3-5 pm band, is several times higher.
245
246
Introduction to Camouflage & Deception
The important parameters of the ship to be considered in the
design of a n IR decoy are area, temperature and emissivity
cha,.: 2teristics. Similar to the modes of deployment of decoys for
aircraft, seduction, distraction and dilution can be employed in
the case of ship also. Other IR decoys employed in the case of
ships are the liquid fuelled decoys and floating solid fuel decoys.
The fuel can be a simple hydrocarbon which is expelled through a
nozzle and then ignited. The liquid fuel decoy is supported on the
ocean surface by a floatation assembly. The US Navy MK 186 Torch
is a typical example of liquid fuelled decoy. The floating solid fuel
decoy floats in the ocean a n d projects a radiant plume of
combustion products of magnesium flare-carbon fuel. In the case
of shipboard decoys, two types of launchers are used - the mortar
launched system and the rocket laurfched systemz2.
VARIOUS DECOYS (Published in Literature)
7.9
Data on various decoys published in literature are briefly
described here.
Tactical Air-launched decoy (TAED)23,on engagement, keeps
the enemy radars operating, thereby increasing the chances of their
destruction by anti-radiation missiles. It has a length of about 92"
(230 cm) a n d width of about 10" (about 2 5 cm). It weighs
approximately 400 pounds (app.180 kg). The decoy can be used
in active a s well passive modes. In the active mode, a n antenna
processes the SAM radar signature and then sends back the
enhanced signature of a full scale aircraft. In the passive mode the
decoy uses a reflective lens located in its nose.
The efficacy of TALD has become evident in the operation
'Desert Storm'. It was launched from A-6, A-7, F/A-18 and S-3
aircraft. TALD forced Iraqi i-adars to stay on the air, easing their
destruction by missiles. TALD was produced by Brunswick
Corporation's Defence Division, CaIifornia, US. Encouraging results
fiom the 137 TALDs deployed by the US Navy during the Gulf War
were one of the factors which led to the contract for the Improved
Tactical Air Launched Decoy (ITALD),which is expected to provide
higher speeds, greater range and more realistic flight profiles.
Antiradar missile decoy (ARMD)24was being produced for the
U S Army and Airforce by ITT Gilfillan USA. It is a miniature
transmitter which protects radar in the field. Each decoy will radiate
signals emulating transmission characteristics of the radar station
it is set to protect, thus confusing any missile tracking and
targetting.
The earliest operational American example of Towed/Free
Flight Decoy17 is Sanders POET - Primed Oscillator Expendable
Deception
Transponder. It is a n active deception jammer. It can be deployed
in such a way that it provides the launch vehicle maximum
protection against active and semiactive radar guided threats. POET
h a s been superseded by t h e Texas I n s t r u m e n t s Generic
Expendable (GENE-X)round which is the first decoy to incorporate18
the monolithic microwave integrated circuit technology (MMIC).
The latest generation US device is the STRAP (Straight Through
Repeater Antenna Performance). The Big Boy is another retrievable
towed decoy jointly developed by Tracor Aerospace Austin TX and
Boeing Military Airplanes Seattle WA. Big Boy also operates by
propagating a larger RCS than that of the aircraft it is protecting17.
Mention may be made of some of t h e off-board
countermeasure^'^. The demand on naval air defences has been
greatly increasing. The types of antiship missiles range from large
transonic cruise missiles such as STYX and the Silkworm to the
latest generation of highly intelligent sea-skimmers such a s Exocet
Block-2 and Harpoon Block C. The countermeasures consist of
hard-kill and soft-kill systems. The hard-kill systern is expensive
and its size often renders it unsuitable for installation in smaller
platforms. The off-board decoy is the most viable soft-kill
countermeasure system to antiship missile. Chaff decoy (which
has been already discussed) will remain the primary soft-kill
medium against radar guided threats. Active off-board decoys will
continue to have a major impact on antiship missile defence.
In order to counter laser-guided weapons, a n experimental
free flying decoy, containing a laser jammer and power supply,
was being developed by Tracor Aerospace and Messerschmitt
Boelkow-Blohm GMbH. It employs a fibre optic based laser warning
system to interrogate the incoming laser beam and determine its
angle of arrivalz5.
Weapon decoys countering the torpedo will be briefly
describedz6.The torpedo threat is more deadly to the surface ship
than the antiship missile. Ships and submarines are highly
vulnerable to underwater explosions, in particular to torpedo hits.
There is therefore a definite need to provide a fully integrated
antitorpedo defensive system. The method employed is to deploy
torpedo decoys such a s US SLQ-25 Nixie for the surface ships. The
torpedo decoy is essentially a noise maker. Such a system is a softkill measure. It can be in two forms - (i)a noise maker stream astern
of a surface warship, or (ii) an expendable decoy launched from a
submerged submarine. The U S Nixie manufactured by Frequency
Engineering Laboratories comprises two small light towed bodies
which transmit acoustic signals intended to complement the ship's
acoustic signature and decoy the torpedo away from the ship.
247
248
Introduction to Camouflage & Deception
From the noise radiated by submarines they are sensed and
hit by torpedoes. The transient noises arising from a rapid last
minute manoeuvre of a submarine could be very revealing to an
alert enemy. In this situation it becomes necessary for the
submarine to deploy decoys instantly. The Submerged Signal
Ejector (SSE), which was originally used for the purpose of
discharging pyrotechnics to locate the position of a submarine in
d i s t r e s s , h a d been identified a s suitable for deploying
countermeasures and for gathering intelligence from submarines.
For this application, these devices were renamed a s the Submarine
Signal and Decoy Ejector (SSDE).This provides instant deployment
of decoys the moment a n incoming weapon is detected. The SSDE
becomes a part of the tactical weapon system. The BANDFISH
developed by Dowty Maritime Sonar and Communications Systems
Limited is an example of such a decoy. The Bandfish is a jammer
which transmits a high intensity acoustic signal covering a wide
range of frequencies adequate to counter the perceived threat. The
decoy may be launched from all submarine operating depths27.
The French Navy's SLAT28(System de Lutte Anti-Torpille) softkill torpedo countermeasure h a s two principal componentsantitorpedo warning system and countermeasure system.
The wake produced by a surface ship is large, leading to a
persistant signature which can be targetted by a torpedo equipped
with a high frequency upward-looking
A wake is caused by several effects such as modification of
thermal structures within the sea, turbulence, stemwaves etc. But
the main source of the wake detectable by the high frequency sonar
in a wake homer is the accumulation of air bubbles due to the
motion of the vessel through the water. The acoustic wake is defined
a s the volume of ocean which has acquired an increased capacity
for absorbing and scattering sonar energy.
It may not be difficult to produce a false wake behind a ship
employing a bubble generator which would mimic the acoustic
back-scattering effects of a real wake. A false wake of right
dimensions so produced a t the right time might be sufficient to
counteract a torpedo's re-attack logic. Alternatively, a device that
is capable of creating a false wake could be towed well astern of
the ship so that a wake homer acquires the device before it is able
to acquire the ship's wake.
The various camouflage measures, unless supplemented with
dummies and decoys, are not likely to be effective. In a stress
situation, a n enemy pilot is likely to attack the first target he sees1'.
He can be misdirected by the use of dummy targets (3-D/2-D).
Deception
They must also be camouflaged inadequately. US, Swedish and
British companies manufacture solid and inflatable dummies and
decoys simulating aircraft, tanks, APCs, artillery pieces and air
defence system. The best known manufacturer in the, field is the
Swedish firm of Barracuda. Bridges can be of crucial importance.
A large number of dummy bridges may well divert and waste enemy
interdiction effort.
REFERENCES
Cott, H.B. adaptive coloration in animals. Methuen & Co Ltd.
London, 1966.
Le
Hockey, J . D. Are we deceiving any one? Naval Proceedings,
2.
Sept 1989, p. 53 .
3. Savoie, A.T. Are we deceiving ourselves, Military Review,
March 1987, LXVII(3) p. 37-45.
4. Uhle-Wettler, F. I n t e r n a t i o n a l military a n d defense
encyclopedia. Trevor Dupuy N. (Editor-in-Chief), 1993,
2,(C-F), p.708.
5. How is it done ? Readers Digest. Readers Digest Association,
London, New York, Sydney, 3rd Reprint, 1992, 76.
6. Electronic warfare supplement. International Defence Review.
1985, 12, p. 55
7. Soviet electronic. National Defence, April 1985, p. 35-42 .
8. Soviet military thought, Military Review, 1982, 6, p. 25.
9. G U S M. International Defence Review, 1985, 8, p. 1235-57
10. Col. O'M Dewar; M.K. Camouflage: advances in defence
technology. Defence Systems, International, 1990, p. 227-32.
11. Godson R. I n t e r n a t i o n a l m i l i t a r y a n d defence
encyclopedia. Col Trevor N. Dupuy, (Editor in Chief)
1993, 2(C-F) p. 768-71.
12. Maj.Shivane A.B., Deception: an operational imperative. The
Cavalier, p . P - 11.
13. Scott, R. Off board countermeasures technology (Part-I) : soft
kill payloads get smarter. Naval Technology, 1994, 15 (4),
p. 16-22.
14. Arthur D' Little (Inc.) Design goals for future camouflage
systems. Report to US Army Mobility Equipment Research and
Development Command Order No. 0006, J a n 1981.
15. Golden, J.R.A. Radar electronic warfare. AIAA Education
Series, J .S. P r ~ e m i e r n i e (Series
s~
Editor-in-Chief),p. 106-119.
1.
249
MATERIALS FOR CAMOUFLAGE
APPLICATIONS
INTRODUCTIQN
The important role played by materials technology in modern
warfare cannot be overemphasised. But for the results achieved in
materials science, some of the technological advancements that have
taken place i n military hardware, weapons, sensors a n d
countermeasures would not have been possible. Quite often, the
criticality of a material, in terms of meeting exacting specifications,
becomes the deciding factor in the proper functioning of the
equipment. In this scenario, with the ever increasing advancements
in military technologies, the need for improved materials a s well a s
new materials with specific characteristics will continuously
increase.
The rapidly advancing technologies associated with military
reconnaissance, surveillance and target acquisition systems are
calling for equivalent developments i n camouflage devices,
techniques, equipment and materials. To a large extent, any
countermeasure to a target acquisition system directly or indirectly
depends on materials. New and improved materials are enhancing
the performance of sensor systems. This in turn is placing great
demand on improved and new materials to defeat the improved
performance of the sensor systems.
Initially, the need for advanced camouflage materials was hardly
felt. To cater for the human eye, the countermeasures required did
not involve any man-made materials. Objects were concealed by'
locally available vegetation or other materials. Gradually the demand
for man-made materials arose, as the range and performance of
human vision was extended by the use of optical and electro-optical
instruments. These materials include paints, as surface appliques
and nets, in order to make the objects blend with the background
such that the role of the aided h u m a n eye is defeated. The
introduction of the near infrared sensitive photographic film placed
a demand on paints which can defeat the infrared film besides the
8.1
252
Introduction to Camouflage & Deception
human eye. Simultaneously, new sensing systems, viz. night vision
infrared systems, thermal imaging systems, infrared seekers and
homing systems, besides the long range, round-the-clock, allweather r a d a r systems, have been added to t h e list of
reconnaissance, surveillance and target acquisition systems.
Further, sensors of nonelectromagnetic type, such a s acoustic,
seismic, magnetic and electric, are being used for target acquisition.
Each of these sensors performs its role by picking u p the signature
which the object may have.
With the developments in sensor technologies the requirement
to simultaneously suppress a large number of signatures has arisen.
This complex scenario has put a great stress on camouflage
materials. No single or simple material can simultaneously suppress
all possible signatures below the threshold value of the sensors
concerned. Broadly, camouflage materials may be divided into the
following classes: those for visible, infrared and microwave (radar)
regions.
Besides these materials which cater for electromagnetic
signatures only, materials for suppression of signatures of nonelectromagnetic nature such as acoustic are required. The presentday approach is one of signature management and multispectral
camouflage. It i s a n integrated a p p r o a c h to arrive a t
countermeasures to defeat all possible sensors by which the military
object may be detected.
In this chapter, the various camouflage materials which are
used for signature suppression based upon the information available
in open literature are discussed.
8.2.
RADAR ABSORBING MATERIALS (
A s discussed in Chapter 6, radar dominates the surveillance
network; not only does it detect airborne objects a t much greater
distances than infrared, acoustic or ultraviolet sensors, but it can
also be used in all kinds of weather. Since the first use of radar,
engineers and scientists have sought ways to mask weaponry from
electronic surveillance with the ultimate goal to keep the enemy
radar screen dark, as if the surveillance beam had passed through
empty space. A s discussed earlier, this is done by various means,
including surface shapes designed to deflect waves away from the
incident electromagneticbeam, the use of radar absorbent structures
and modified surfaces, and employment of onboard avionics.
These measures, by no means fool-proof, known a s stealth
techniques (whichare described in a subsequent chapter) are applied
in varying degrees to airplanes, ships and tanks. Some radars,
especially those using long wavelengths, are hard to delude. In
aircraft designs that give stealthiness, stealth measures necessarily
compromise performance, range and payload. However, aeroplanes
Materials for Camouflage Applications
can be much more effective the longer they can hide, and weaker
echo means a diminished target for missiles and better ability to
employ deceptive countermeasures.
Radar absorbing materials (RAMs) in the form of surface
coatings or structural materials play a n important role by
complementing or augmenting reduction in RCS of both military
and civilian targets where the reduction of radar echo from metallic
structures can be a vital requirement.
Radar echo includes specular (or direct) reflections, edge
diffractions, multiple reflections and creeping waves (which
propagate along the body surface and emerge at the opposite edge).
The tangle of variables makes the design of radar absorbing materials
very tricky. The task is further complicated by the facts that i)
different radars affect the target in different ways, and ii) there are
continuous improvements in radar system performances.
Fundamental to the design process of radar absorbing material
is comprehensive knowledge of the electrical properties of the
material over the frequency range of interest. A s discussed in Chapter
6, these properties are described by the complex permeability (p)
and dielectric permittivity (E)
p = p, ( I -tan 6J
E = E, ( I -tan 6,)
(tan 6 is loss tangent)
z=JP/E
z = impedence (377 2
! for air)
8-3
Many materials exhibit only dielectric properties, but some
display both dielectric and magnetic properties and are attractive
a s radar absorbing materials because they can provide good
absorption performance a t lower thickness.
In most RAMs, the first step is to make the total pathway (of
energy within the RAM) equal to halfa wavelength so that the residual
reflection from the back face is exactly out of phase with front face
reflection. However, RAM can be much thinner than the nominal
wavelength of the radar and still achieve cancellation because the
wavelength inside the material is much shorter than in free space.
In addition, refraction within the RAM keeps the internal path length
close to constant over a wide range of incidence angles.
RAMs are tailored so that the energy that travels through them
bounces off the substructure and escapes. Additionally, the RAM
coatings applied on surfaces of aircraft for stealthy applications
must be thin, weigh a s little a s possible, withstand stressing
temperatures, pressures and erosive environments, generally be
covered by materials to keep things together structurally, and must
not disturb the smooth contours of the airframe.
253
254
Introduction to Camouflage & Deception
Though most of the R&D work on RAMs is classified, various
types of known RAMs are discussed in the following section.
8.2.1 Magnetic Materials
Fenites
Fenrites are ferrimagnetic materials of general chemical formula
MO(Fe,O,), where MO is a metal oxide of a divalent metal such as
Fe, Mn, Co, Ni, Mg, Zn, Cd. They are prepared by thoroughly mixing
the iron oxide and the metallic oxide MO. The mixture is then heated
a t a temperature which is less than the melting point of either of
the oxides, where the oxides sinter together into a spinel crystal
structure1.
Figure 8.1.
Two octants of the spinel structure. The large spheres
represent the oxygen ions. The small black and white
spheres represent the metal ions on tetrahedral and
octahedral sites respectively.
Source:
Reproduced from the book 'Fenites'by J. Smit and H.P. J. Wijn (1959) (figure
31-2) chapter VIIIJ, with permission from Philips Research, Library and
Documentation Eindhoven, The Netherlands.
Materials for Camouflage Applications
In ferrites, usually the iron ion is surrounded by six oxygen
ions, in octahedral configuration, and metal ion (M) in a tetrahedral
configuration, (Fig 8.1). The distribution of ions between the two
types of sites is determined by a delicate balance of contributions,
s u c h as the magnitude, of the ionic radii, their electronic
configurations, and electrostatic energy of the lattice. The important
atomic property that contributes to the observed magnetic properties
is electronic spin quantum number. The unpaired spins of the metal
atom which contribute to the magnetic moment and vector sum of
the resulting magnetic moments give rise to the observed magnetic
moment of a given atom.
The magnetic moment of a given ion is affected by the crystal
field exerted by oxygen atoms on that ion, and the net magnetic
moment of a unit cell is the sum of magnetic moments in the unit
cell. Iron atoms may be in tetrahedral or octahedral field whereas
metal atoms are in the tetrahedral field. In this type of structure,
iron atoms have a tendency to reverse their spins in the A and B
sites, leaving only the metal ions to contribute to the magnetization
of the ferrite. Conversely, by adjusting the ratio of Fe/metal atoms
in the ferrite, it is possible to design a material with any desired
saturation magnetization.
Saturation magnetization is important because the oscillating
magnetic vector of propagating electromagnetic radiation in the
microwave region can couple to spinning electrons in ferrites. The
degree of coupling depends upon the magnitude and direction of
the electron spin. Saturation magnetization is the net magnetization
due to all electrons, and the degree of coupling depends upon
saturation magnetization.
Essentially, each unit cell of ferrite acts a s a tiny magnet with
finite magnetic moment and all these magnetic moments add up,
provided their directions are the same. The region of the crystal
where this condition is satisfied is called a domain. The vector sum
of all these domain magnetic moments is the observed saturation
magnetization of a given material. Although these randomly oriented
domains may be directed in the field direction under applied field,
they revert to their equilibrium positions once the applied field is
removed.
The mechanism of interaction or coupling of microwave
radiation with ferrite materials in the applied magnetic field is a s
follows: When a solid ferrite material is placed in a magnetic field, it
will have a resonance frequency given by the equation
OI = YHi
8-4
where o is the midband resonance frequency, y is the
gyromagnetic ratio, and Hi is the internal magnetic field in presence
255
256
Introduction to Camouflage & Deception
of applied magnetic field Ha.In other words, electrons not only spin
about their own axes, but also precess about the stationary magnetic
field H, a t a frequency given by the equation 8-4, if damping losses
are neglected.
If microwave radiation corresponding to the resonance
frequency and polarization is incident upon these spins, the
oscillating magnetic vector of incident radiation couples with spins.
The energy exchange manifests by changing the angle between the
spin axis of the electrons and the internal magnetic field H,. The
coupling is expressed as loss of energy with unit of decibel (dB).
Usually the loss is not sharp and has a range of frequencies called
linewidth. The smaller the linewidth, the sharper the peak, or viceversa. Further, H, is a function of the geometry of the monolithic
ferrite material.
If there is no magnetic field and the only field is that derived
from the microwaves, then the mechanism of interaction between
ferrimagnetic materials and suitable frequency in the microwave
region may be different and is not discussed clearly in the literature.
A brief review of the available information is given here.
Although it is possible to couple electromagnetic radiation with
electronic energy levels in an atom, ferrite materials exhibit high
insulating and passive dielectric properties, and as such, the only
alternative for propagating electromagnetic waves through them
would be a function of their magnetic properties.
A s explained earlier, ferrimagnetic materials exhibit magnetic
property by spatial ordering of electron spin orientation of electrons
from magnetic ions in the crystal. Radiation in the microwave region,
under proper conditions, may spontaneously realign electron spins
during magnetization. In a macroscopically demagnetized sample,
the domains are arranged in haphazard orientations. Low frequency
microwave radiation is typically attenuated by domain wall
movement and high frequency microwave radiation by rotational
resonance effects.
Another mechanism of microwave absorption by ferrimagnetic
material is nonlinear absorption a s a function of radiation power
level. At milliwatt power level the absorption loss can be small, but
a t higher power level sudden increase in absorption is observed
beyond a certain value which continues until saturation is
achieved2s3.The generally accepted mechanism for this observation
is the excitation of spin waves when the microwave field exceeds a
critical value. The critical field is dependent upon many factors such
a s geometry, magnetization, R.F. power level, main linewidths,
gyromagnetic ratio and operating frequency. Another related
Materials for Camouflage Applications
mechanism is that there exists a spectrum of spin waves in any
material with varying energy levels excitable by different critical field
levels. In such a situation, the absorption will increase as microwave
power increases a s more s p i n s a r e excited. However, i n
polycrystalline powders the grain boundaries provide sufficient
discontinuity to break u p spin waves.
To summarize, there are several mechanisms at play in ferrite
materials to absorb energy from microwave radiations. However, no
database has been established on the magnetic properties of these
materials. In several cases, their composition itself is not defined,
nor their electrical and magnetic properties. Even in the cases where
these are defined, the properties are not easy to tabulate because
there is no standard method of measurements.
~ - the
~ formula Ni,.,Zn,Fe,O,
Paints using Ni-Zn f e r r i t e ~ of
(x I 0.5) in polyurethane or epoxy resins are commercially available
as radar absorbing materials.
Carbonyliron
Fine powder of iron dispersed in epoxy resin is being sold,
under the trade name Eccosorb, a s radar absorbing paint. Eccosorb
coatings are capable of attenuating surface current from 50 MHz
through microwave frequencies. These coatings are useful in
reducing cavities, acting as attenuator in transmission lines,
modifying antenna radiation pattern by being applied to radiating
elements, and reducing radar cross section of complex objects.
The core material of these paints, i.e., fine powder of iron, also
known a s carbonyl iron, is obtained by heating iron to 100-200°C
under 50-200 atmospheres of carbon monoxide to form iron
pentacarbonyl, Fe(CO),. The latter is then vaporised and decomposed
at around 250°C to give iron as a fine powder free from most
impurities. Traces of still remaining carbon and oxygen are removed
by sintering the material in vacuum when they are removed as
carbon monoxide.
8.2.2 Dielectric Materials
Dielectrics or graded absorbers operate by effectively altering
the dielectric properties of a material at different depths. The material
surface impedance is designed to closely match that of free space,
(Z =m=
370 ohms), which encourages radar wave absorption and
produces little reflection from the front face a s the wave progresses
through the material (through the changing dielectric constant),
loses and dissipates the wave's electromagnetic energy. These losses
can be explained in terms of phonon-photon conversion phenomenon
in polar dielectric insulators.
257
258
Introduction to Camouflage & Deception
In direct phonon-photon conversion, the polarization induced
in crystal lattices by incoming electromagnetic fields relaxes into
nmmal oscillation modes which eventually redistribute the
electromagnetic energy into thermal phonons. This type of loss
mechanism depends on the number of available normal modes of
ions in the lattice, which is a strong function of temperature and of
frequency. This mechanism is particularly ineffective a t low
temperatures, where, for instance, crystalline solids exhibit very
low attenuation constants. This process becomes more effective at
high temperatures, up to a point where, together with increasing
semiconduction losses, i t c a n lead to thermal runway
phenomenonl0.l1.
In this category of microwave absorbers, materials are available
in the following forms:
Honeycomb -A light-weight, broad-band absorber effective over
2-18 GHz range. This material can be used in load-bearing
structures. The core, resin system, cell size and thickness can
be adjusted to meet the requirements of a particular application.
Depending on the thickness, honeycomb-based absorbers can
provide 10-15 dB attenuation over a specific frequency range;
Open-structured netting material, either left open or filled with
urethane foam, is rugged, light in weight (2 oz/ft2 or 0.6 kg/
m2),low cost and typically provides 15 dB attenuation from 8100 GHz;
Salisbury screen - A quarter wave tuned frequency absorber
formed a s a light-weight laminate with reflective backing.
8.2.3 Artificial Dielectrics
A composite of conducting particles dispersed into a dielectric
insulating material (ceramicor polymer matrix)is known as artificial
dielectric. These composites make use of metallic behaviour of
conductive particles to get effective and controlled microwave
absorption. These materials and their properties have been known
for a long time and have been the subject of extensive theoretical
and experimental s t ~ d i e s ' ~ - ' ~ .
The basic loss mechanism here is scattering of electrons within
each elementary grain due to current induced in each grain by the
incoming electromagneticwave. Depending on the size and resistivity
of the grains, the losses in each grain can be electric or magnetic,
and a particular frequency can be selectively attenuated16.
Typically, radiation is best absorbed if the grain diameter is of
the order of the skin depth in the grain material. By choosing a
proper conductivity material in powder form, and by knowing its
Materials for Camouflage Applications
resistivity, grain size (or size distribution), its concentration and
the dielectric properties of the host material, it is in principle possible
to obtain specific combination of dielectric constant and losses.
However, the actual choice of materials that will yield specific
electrical and magnetic properties is difficult in practice, because of
the poor control of the powder properties, and it is even more difficult
if the artificial dielectric is to be manufactured in the ceramic form.
Artificial dielectrics present properties which are much milder
functions of the constituents' properties than other types of lossy
materials.
8.2.4 Conducting Polymers
Synthetic polymers, whose long molecules contain hundreds
of identical structural units, have been insulating electrical
equipments since the turn of the century. The discovery, in the
7OYs,of polymers with high electrical conductivity stirred intense
interest in the research and development community. The first
conducting polymer was obtained in 1977 by a group of American
scientists17 from acetylene - a common gas used for welding
purposes. This report led to the synthesis of a large number of
conducting polymers obtained from a variety of organic monomers
and
~ ~ 'aromatic^.^^-^^
~
The most important
such a s h e t e r o c y ~ l i c s ~
criterion for selection of monomers to give conducting polymers is
the formation of conjugate bonding in the backbone of the polymer
obtained.
Such polymers on interaction with electron acceptors (oxidizing
agents) or electron donors (reducing agents) create charge carriers
and get doped with these species. The former withdraws electrons
while the latter adds them. Among the common dopants are halogens
(like iodine or bromine), transition element cations (like ferric or
ceric cations), organic oxidising agents (like chloronil o r
dichlorodicyanoquinone), and inorganic reducing agents (like
sodium, potassium metals).
Though there is no single method for synthesising conducting
polymers derived from different types of monomers, they can be
obtained by both chemical and electrochemical methods of
polymerizationz4. In the chemical procedure, the common
polymerization methods a r e adopted, e.g., polyacetylene,
by
polyparaphenylene and polyphenylene sulphide can be o b t ~ n e d
Ziggler-Natta17, Friedel Craft25 and nucleophilic displacement
reaction26, respectively. Electrochemical procedures have mainly
been used in the synthesis of polymers from heterocyclic
rnonomer~~~-~'.
259
260
Introduction to Camouflage & Deception
in organic solvent
Figure 8.2. Electrochemical method of polymerisation.
Electrochemical method (Fig 8.2) offers the advantages of
simultaneous and homogeneous incorporation of dopants during
polymerization and close control over the polymerization parameters.
The method is limited, however, by the fact that the yield of polymer
is restricted to the area of working electrode. For this reason (among
others), chemical procedures are used when large quantities of
materials are required. Several conducting polymers are now
available commercially.
Polymers, in general, are relativeIy light and easy to process.
The combination of metal-like or semiconductor-like conductivities
together with the availability of other properties such as low
environmental contamination, redox behaviour, optical changes
(linear and nonlinear) and, above all, modulating/tuning of many
of the properties via organic chemistry, have generated great interest
in these materials. The earlier academic interest has overflowed
into developmental efforts in national laboratories, defence, and
commercial companies worldwide. Several products, based on
conducting polymers, such a s capacitors, light weight rechargeable
batteries, high capacity (4 MB) magnetic disks for computers,
coatings for antistatic and anticorrosion applications, thermoplastic
conducting polymer blends, etc. are available commercially now in
the international market.
Materials for Camouflage Applications
Like in the other sectors, in defence also, the response of
conducting polymers to a very wide frequency r a n g e of
electromagnetic spectrum (fromDC through optical frequencies) has
given the possibility of applications such a s static charge dissipation,
lightning strike protection, embedded antennas, sensors, antiradar
aids - technologies generally known a s 'smart-skins'.
In the application of conducting polymers a s antiradar (stealth)
material their response to the frequency range 107-10" Hz is of
special interest. For efficient use of absorber, without any significant
reflectance, it is important to grade the microwave absorption with
thickness. The absorption is related to the quantity
tan 6 = PEE^) = E" / E'
where tan 6 is the loss tangent, o and
E conductivity and
dielectric constant respectively a t frequency o.Here q,is the dielectric
constant of vacuum and E" and E' are the real and imaginary parts
of the dielectric constant.
Microwave studies on polyaniline reveal that loss tangent
increases monotonically3* with protonation and for the most
conducting form (50 percent protonation) cs = 1n-'cm-' E = 100 and
tan 6 = 2.5. The value of tan 6 varies with the protonation level/
dopant concentration. Although their conductivity is intermediate
among conducting polymers, polyaniline emeraldine salts (Figure
8.3)have a large dielectric constant. Table 8.1 compares the values
of tan 6 and dielectric constants E,for microwave materids available
in the market, together with a few polymers and ceramics.
Table 8.1. Dielectric Properties
Material
tan 6
GHz
Er
Paper
Snow (-20°C)
Nylon
Water1
Polyethylene
Teflon
Fused silica
Fused Quartz
Bakelite2
Eccosorb VF3
Polyaniline
0.04
0.0004
0.01
0.26
0.0001
0.0003
0.00008
0.00003
0.01
1.2
2.6k0.6
10
10
10
10
35
50
35
2.62
1.26
2.73
34.0
2.3
2.05
2.01
3.80
Source:
3.5::
6.5
41.0
105k15
Reprinted with permission from Microwave Journal, page 162, Feb. 1989. 1 conducting water; 2 - used as attenuator or loading material; 3 - a trademark of
Emerson and Cuming
261
262
Introduction to Camouflage & Deception
Figure 8.3.
The PAN1 Polymer (a) reduced form; (b) The emeraldine
base; and (c) 50 percent protonated emeraldine salt.
Source:
Reprinted with permission from Microwave Journal, 1989,February, p.162.
The microwave response of several conducting polymers has
been studied by several workers using a variety of techniques.
Scattering data, obtained from network a n a l y ~ e r s ~show
~ - ~ that
~,
several processes influence the dielectric properties of these
materials. The chemical composition, conjugation length, nature
and concentration of dopants or ionic impurities, interchain
distance and morphological structures are some of the dominating
factors that influence the dielectric constant and loss tangent of
the polymer.
The ability of conducting polymers to absorb microwave and
other electromagnetic radiations can also result in another
interesting application40, i.e., welding of plastic joints through
remote heating a s a spin-off benefit. For instance, conducting
polyaniline may be placed between two pieces of plastics (e.g. high
density polyethylene whose surfaces need to be melted in order to
fuse them together). Exposing the components of insulating polymer
with a layer of polyaniline between them to microwave radiation
can lead to the formation of a strong bond. A related application of
remote heating is to form part of a polymer vessel of a low melting
polymer which has the conducting polyaniline applied to it. The
exposure of this configuration to microwave radiation will lead to
melting of the polymer adjacent to polyaniline and hence forming a
remote break seal.
8.2.5 Chiral and Two Dimensional Polymers
Besides conducting polymers, two other types of polymers viz.
chira141and two dimensional polymeF2, the latter also having an
Materials for Camouflage Applications
element of chirality, have been reported a s potential radar absorbing
materials.
Chirality in a molecule or crystal arises when the structure
has sufficiently low symmetry that it is not superimposable on its
mirror image and is responsible for optical activity in that substance
(Fig 8.4). A large number of liquid crystalline polymers are known
to show chiraliW3.
Figure 8.4.
Simple model for chiral molecufes: (a) Schematic
representationof helical macromolecule @) "Twistedbelt"
as a simple model for cellulose chain (c)Primitive model
for a molecule of the chiral nematic with a substitution
group.
Source:
Reproduced from "Liquid crystalline and Mesomorphic polymers" editors-V.
P. Shipaev and Lui Lam, Figure 101, page-4 chapter-1 (1994)with permission
of Springer-vetlag GmbH & Co. KG Heidelberg, Germany.
263
264
Introduction to Camouflage & Deception
The first attempt to study the effect of relatively large scale
He measured
chiral structure was made by Lindman in 191444945.
the plane of polarization of a linearly polarised plane wave after its
passage through an ensemble of copper helices of one handedness
embedded in a host medium; an analogous study was done by Tinoc
and Freeman in 1957. Their experiment was of a qualitative nature,
and considered the phenomenon of optical activity at a much lower
frequency range than the optical studies. For the millimeter and
microwave frequencies the name 'electromagneticactivity has been
suggested by Lakhtakia, et aP6instead of optical activity'. At these
frequency ranges the medium parameters such as E, p and chirality
denoted by K rather than refractive index for left and, right handcircularly polarised light, play the major role.
In the past few years chiral media have gained considerable
interest due to their potential applications and feasibility in
microwave engineering. Interesting applications are in the area of
low reflection coatings a n d corrections of polarisation in
inhomogeneous lens antennas.
Two Dimensional Polymers
Polymers are usually defined to be chains of thousands of small
monomers linked together. Biologically important arnylopectin (a
multiply branched molecule and the principal component of
starches) a t 9x107daltons, or DNA (basicallyladder polymer of base
pairs and backbone chains) a t 6x10' daltons are amongst the largest
known polymer molecules. Most of the synthetic polymer molecules
of commercial importance are linear chains weighing between 5x 1O4
and 5x106 daltons. There are two general backbone types : rigid
rods and flexible coils. The linear chain and its close cousins
(branched chains, rings, network and so on) are all basically one
dimensional in that they may be described by reference to unit line
(which represents location along a simple linear chain) with the
appropriate added description of the branching nodes and their
interconnections.
There are two-dimensional polymer-like assemblies that occur
naturally such as in cell membranes, where large molecules line up
parallel to each other and are held together in a layer by electrostatic
attraction. But these structures are unstable because electrostatic
forces are weak compared to the covalent bonds formed between
atoms that share electrons.
~ ~ reported the synthesis
Recently, Stupp and c o - w o r k e r ~have
of a homogenous two-dimensional polymer which can be 10 nm
thick and several square millimeters in area with molecular weight
in billions of daltons.
Materials for Camouflage Applications
Acrylate
end
Benzoic
acid ester
Cyanide
group
Phenol
ester
Biphenyl
Hydrocarbon
tail
Figure 8.5.
Molecular structure of two-dimensional polymer,
Source:
Reproduced from Science,6 Feburary 1993, p. 14 - Molecular structure of two
dimensional polymer by John Emsley with permission of American Association
for the Advancement of Science.
265
266
Introduction to Camouflage & Deception
This molecule was synthesised from three components. The
central section is a short chain of seven carbon atoms with a benzoic
acid group a t one end and phenol at the other. Along this chain is a
cyanide group. The benzoic acid end was joined, via an ester link, to a
shorter chain of four carbon atoms which has an acrylic group at the
far end. To the phenol end a biphenyl derivative with a hydrocarbon
trail was attached, again by means of an ester bond (Fig 8.5).
Applications that have been suggested for these polymers
include lubricants, in semiconductors, optical materials and selective
membranes. In addition to these, other very important potential
defence applications are outlined below:
(i)
Due to the presence of the chiral part the material can act as
second harmonic generator, and the wavelength entering in
the media can be halved. This property would allow, for example,
applications enabling IR transmitters on the battlefield to be
detected;
(ii] Since the sheet thickness is double the length of the monomer,
extremely thin, yet very uniform and flat, sheets of such
polymers with a large dielectric constant could be formed. These
sheets which are flexible can curl under certain conditions of
temperature and chemical environments. Further, if the outer
surface (formed by the circular ends) is modified in such a way
a s to bond on one side to a metal surface, such a s the skin of
a n airplane, and the other side to ferrite compounds, then a
radar absorbing material of extremely light weight and
uniformity would be the result. Since the molecules forming
part of the bonded structure would be very large, the absorbed
energy would be readily transmitted away via the sheet structure
and an even better absorber provided than by a chemical layer
applied to the skin.
8.2.6 Schiff Base Salts
In 1987, a group of researchers led by Robert B. Birge at
Carnegie Mellon University in USA identified a group of non-ferrite
based materials capable of absorbing radio frequency transmission
that could reduce aircraft radar reflectance by 80%48. These
materials, known as retinal Schiff base salts, are polymers containing
a double bonded carbon-nitrogen (-CH=N-)structure linking divalent
groups in the linear backbone of the molecule chains, (Pig. 8.6).
These salts are obtained by the reaction of retinal, a n aldehyde, a
precursor of vitamin A, with a n amine.
These salts are highly polar, black in colour, and phydcally
resemble graphite. Their importance is that they absorb RF energy
Materialsfor CamouflageApplications
H3C
"\
CH3
R = Mkyl or aryl group
Figure 8.6. Molecular structure of retinal schiff-basesalt.
a s well a s or better than ferrite-based paints for about one tenth
of the weight; and specific salts seem to absorb specific R F
energies. Salts, however, require modification so that a n ensemble
of them could absorb over the entire radar RF range.
The radar energy absorbed by these salts is dissipated a s
heat. However, the heat rejected by the molecules is so small
that the temperature of a coated surface may increase by only
l ~ l O OC
- ~which should not be a concern about increased infrared
signature.
8.3
INFRARED CAMOUFLAGE MATERIALS
The various sensors that are used in the infrared region of the
electromagnetic spectrum have already been discussed in Chapter 5.
The threat perceptions thus posed by IR detectors give rise to
the need for thin coatings of materials a t object surfaces to control
absorption and reflection of IR radiation with an optimum balance
of these properties in the near infrared (NIR) and thermal infrared
(TIR) regions. For example, low NIR reflecting paints strongly absorb
the NIR component of solar radiation and as a result increase thermal
infrared signatures.
8.3.1 Physical Principles
For camouflage in the infrared, the regions of special interest
are: NIR (0.75 - 3.0 pm), MIR (3 - 6 pm) and FIR (6-15 pm). The selfemissions and reflection by objects can be understood from the
principles of black body radiation and solar radiations. Detailed
discussions have already been made in Chapter 5.
8.3.2 Attenuation of Infrared Signatures
In principle, emitted infrared radiation from an object and
causing its signature in the infrared can be curbed by three
mechanisms, viz., scattering, absorption and reflection, adopting
one or a combination of the following methods49:
267
268
Introduction to Camouflage & Deception
Obscuration
Shape tailoring
Surface treatment
Active cooling
Wake control
Among these methods, obscuration and surface treatment are
the most important ones and are discussed here in detail. Shape
tailoring is often useful in combination with surface treatment and
is closely related to that followed in signature control in the
microwave region. Active cooling is common in designs for
suppression of heat generated by an engine. Wake control should
get more attention as success is achieved in controlling the more
direct signature contributors. These methods are not discussed
further.
8.3.2.1
Obscuration
Obscuration has been already referred to in Chapter 4. It is
often easier to hide a signature source than to eliminate it.
Accordingly, obscuration is one of the more common suppression
techniques. Obscuration can take many forms. It can range from
simple baffle, designed to obstruct the line of sight to a hot part, to
a camouflage net, to a smoke. Obscuration is done on the
assumption that the object accomplishing the obscuration will be
easier to control than the object it hides49.
Obscuration works on the principle of scattering. Scattering of
visible and infrared radiation is a single stage process and is
commonly referred to as being either elastic or inelastic. Elastic
scattering, also referred as Rayleigh scattering, is the one in which
radiation retains the same quantity of energy and momentum and
hence keeps its frequency unchanged. In inelastic scattering, known
a s Raman scattering, the energy is exchanged with the scattering
object and shifted by a n amount equal to the change in vibrational
energy of the material through which the radiation is passing.
Both kinds of scattering processes result from electromagnetic
radiation perturbing the electronic cloud surrounding the
molecules of t h e irradiated material. Rayleigh scattering
occurs in the presence of small independent particles commonly
present in colloidal a n d other s u s p e n s i o n s containing
particles with sizes comparable to or larger than the wavelength
involved. For a fixed value of the scattering power m, the
wavelength A. most efficiently scattered by a particle of diameter d
is given by
Materials for Camouflage Applications
where
In this equation n is the refractive index of the medium which
in case of paint is the same as for the resin.
Taking advantage of the scattering phenomenon in smoke,
suitable sizes of suspended particles are generated to obscure
signature in the visible and infrared regions0.
8.3.2.2
Surface Treatment
Surface treatment by way of putting coatings of different
materials on the surface alters surface characteristics by modifying
their reflection, self-emission and directional properties, which act
a s a major tool for the design of camouflage in infrared region a s
well as in the visible and microwave regions. In the infrared region
the main emphasis of putting such coatings on a surface, however,
is to modify its reflection and self-emission characteristics.
The important relationship between emissivity and reflectivity
is given by the following equations :
Diffuse E, = l -p
8-7
Specular E,
=
1-pd (8, $)
8-8
where p = total reflection
and 8, @ = viewing angles
A major implication of this equation in signature control is
that a low emissivity surface must have a high reflectivity, and,
conversely, low surface reflectivity results in high emissivity. A
practical implication is that, when placing a high temperature object
in its natural environment, low emissivity coatings may reduce selfemission but still result in significant overall apparent emissions
because of reflections. A logical consequence is that situations can
arise where low emissivity, or surface treatment, can, by itself,
provide the desired signature control level.
Figures 8.7a and 8.7b and Figures 8.8a and 8.8b show
representative emissivities required for infrared camouflage by
surface treatment whenever there is such possibility. In these figures,
target minus background AT'S were computed from the relation :
AT= T (target) - T (background).
269
270
Introduction to Camouflage & Deception
0.6 ;-
I
Sky Background
Ground level
1962 U S Std. atmospher
planar panel.
Specular reflectance
night
3-5 micron band
PANEL AT PC)
/
-
-- - 0
Figure 8.7a. Emlssivity required for zero contrast as against
horizon sky at 3- 5-pm band.
Source:
Reproduced from "The infrared and electro optical systems hand book. Vol. 7
Countermeasuresystems, edited by David H. Pollock - chapter-2. Camouflage,
suppression and screening systems by David E. Schmieder (section 2.1 to
2.5) with permission from the publishers-ERIM & SPIE Optical Engineering
Press USA (1993)and the author.
Materials for Camouflage Applications
8- 12 Micron band
PANEL
Fig. 8.7b.
Source:
T(C)
Emissivity required for zero contrast as against horizon
sky at 8-12 pm.
Reproduced from "The infrared and electro optical systems hand book.Vol.7Countermeasure systems, edited by David H. Pollock - Chapter-2 Camouflage,
suppression and Screening systems by David E. Schmieder (section 2.1 to
2.5) with permission from the publishers-ERIM & SPIE Optical Engineering
Press USA (1993)and the author.
271
272
Introduction to Camouflage Ck Deception
Terrain Background
Figure 8.8a.
Source:
3-5 Micron band
Emissivity required for zero contrast as a function of
panel tilt angle when viewed against terrain at
3-5 pm band.
Reproduced from The infrared and electro optical systems hand book. Vol. 7
Countermeasure systems, edited by David H. Pollock - chapter-2 .Camouflage,
suppression and screening systems" by David E. Schmieder [section 2.1 to
2.5) with permission from the publishers-ERlM & SPIE Optical Engineering
Press USA (1993)and the author.
Materials for CamouflageApplications
-
Figure 8.8b.
Source:
8-12 Micron Band
Emissivity required for zero contrast as a function of
band tilt angle when viewed against terrain at 8-12
pm band.
Reproduced from The infrared and electro optical systems hand book. Vol. 7
Countermeasure systems, edited by David H. Pollock - chapter-2 "Camouflage,
suppression and screening systems" by David E. Schmieder (section 2.1 to
2.5) with permission from the publishers-ERIM & SPIE Optical Engineering
Press USA (1993)and the author.
273
274
Introduction to Camouflage & Deception
Both target and background temperatures are physical
temperatures. For terrain, because unit emissivity was assumed,
the background temperature was assumed a s the apparent black
body radiant temperature. However, for the sky background,
apparent radiant temperature was lower than its physical
temperature. Examination of these emissivity plots reveals that a
warmer terrain background allows higher emissivities for a given
target AT'S than does a horizon sky background because the latter
is less dense than the former.
In general, spectral reflectivity requirements are scenario-and
application-dependent. However, nominal requirements can be
stated from signature generation principles and typical vehicle usage.
In near infrared (NIR),reflectivities need to be dramatically
higher against live foliage background. In the mid-and long wave
(thermal)infrared, reflectivities need to be high on high temperature
parts so that the resulting low emissivities can reduce self-emission50.
Required emissivity values can easily range from 0.05 to 0.6. These
low emissivities can result in high daytime solar reflections as well
as high day and night ground reflections. So, in some cases, as
with high altitude aircraft, reflectivities must be kept low, and other
means, such a s active cooling techniques, must be used to control
the mid-infrared and long wave infrared emissions.
8.3.2.3 Coating Materials For Camouflage i n Infrared
Region
Coatings offer the potential to reduce heat-induced selfemissions by reducing surface emissivity, and such coatings are
obtained in the form of paints. Before beginning the formulation of
any coating with specified infrared properties, it is important to
define the illuminant and conditions of illumination, the spectral
response of the detector or viewer, the desired visual colour of the
coating, and the spectral distribution of the radiation to be reflected
or absorbed. The next step is to select a vehicle (binder)with good
heat resistance and minimal absorption in the infrared bands of
interest. Pigments are then selected for their emissivity (reflectivity)
properties.
Binder Resim
There are two primary requirements for resins in tailored
coatings. First, the resin must protect the pigment and preserve its
infrared properties throughout the service life of the coating, and,
secondly, it should exhibit very weak interaction with the
electromagnetic radiation of interest. Though most of the organic
resins are free from significant absorption in the NIR region, they
show strong absorption in the thermal IR regions51.
Materialsfor CamouflageApplications
Strong absorption in the thermal IR regions can be avoided by
choosing resins which do not contain common functional groups.
For example, poly(viny1idenefluoride) resins are almost transparent
to, and unaffected by solar radiation. They have only very weak
absorption in the thermal IR region52in addition to having excellent
weather stability. Dimethyl silicone resins have emittance values
lower than those of fully organic resins and have been used for low
emittance coatings53. Further, absorption by resins can also be
reduced by the selection of pigments which because of their refractive
indices and particle sizes scatter light effectively in the band where
resins absorb. This technique can be used to great advantage in the
thermal IR region. In addition, leafing metallic pigments which form
a practically continuous film reduce the penetration of incident
radiation and absorption by the underlying resins.
Pigments
In conventional paints the main role of the pigment is to provide
opacity and colour through control of reflectivity of the paint with
its right index of refraction as compared to the binder resins.
However, pigments exert their principal influence on the optical
and NIR properties of coatingP. Pigments used in the infrared region
are selected based on their emissivities, scattering and reflectance
properties in this region.
Plgments and Coatings for Near Infrared
A wide variety of useful NIR properties are obtained when
pigments are dispersed in film. Titanium dioxide pigments reflect
NIR radiation very well as indicated by their high value of scattering
power. Titanium dioxide with a particle size of 10 pm reflects well
between 0.8 and 2.3 pm with very little or no effect on the visual
colour of the coating.
Pigments which absorb in the visible region (required for visual
colouration) but are transparent in the NIR region can be considered
to be extenders so far a s NIR radiation is concerned, that is, they
can be used to modify the visual appearance of the paint without
affecting the infrared properties. Organic pigments such as perylene
black, phthalocyanine blues and greens and carbazole dioxazine
violet are useful for the purpose.
Conventional extender pigments such a s barytes, amorphous
and diatomacious silica, and talc are transparerit and non-reflective
throughout the visible and NIR regions. These pigments are valuable
where transparency in the NIR is needed, and they do not interfere
with the performance of other pigments. Carbon black absorbs
strongly throughout in the NIR and thermal IR region55;when used
in small amounts it is effective in decreasing the infrared reflectance
275
276
Introduction to Camouflage & Deception
of the paint in near and thermal infrar-ect regions without greatly
affecting the colour.
In painting military objects 'to protect against systems which
use the NIR wave bands and operate in low light conditions, it should
be understood that the term 'low reflecting infrared paint' generally
means a paint that is highly absorbing in NIR (with consequently
higher signature in TIR on exposure to sunlight). Likewise, the term
'infrared reflecting paint' refers to highly reflecting NIR paint (with a
consequently lower thermal signature on exposure to sunlight).
Pigment and Coating for Thermal infrared Region
Coatings using conventional pigments and working on
scattering principles are ruled out for this region because of the
difficulty in getting a balance between the size of the pigment particles
required to scatter in this region and overall desired s m o o t h n e ~ s ~ ~ .
Inorganic pigments show strong and broad absorption bands.
For example, carbonate absorbs at about 7pm, silicate at about 9
ym and oxides between 9 and 30 ym. Organic pigments such as the
perylene blacks, phthalocyanine blue and green, and carbazole
dioxazine violet show strong sharp absorption bands throughout
the thermal infrared, but principally between 6 and 11 pm. The
properties of coatings based on these pigments are likely to be
influenced by the pigments used and are wavelength dependent.
Grey body approximation for these coatings is likely to lead to
considerable error.
For these reasons metallic pigments in the form of flakes are
generally used to achieve both emissivity and reflectance coatings
in the thermal infrared region. Metals show low emissivity because
they contain free electrons that provide for high refractive indices
over broad bands57. Figure 8.9 shows an example58of the broad
band control that is achieved with aluminium having various surface
conditions. Furthermore, metals absorb poorly but scatter and reflect
strongly in the thermal infrared region due to high density of their
electrons59.A coating filled with metals can be considered as a grey
body.
Less reflectivity and more spectral shaping can be accomplished
by choosing lower conductivity materials. Semiconductors show less
conductivity than metals. Their lower electron density causes
semiconductors to have a high refractive index, with corresponding
high reflectivity a t longer wavelengths and transparency at lower
wavelengths, with reduced refractive index a n d extinction
coefficients. This effect can be controlled by varying the population
of charge carriers through changing the composition or temperature.
Materials for Camouflage Applications
.2
-
.1
-
0
>...
............--.-..
'.-..............:.,.---.
Sanded
........................
...
Polished
.............................
......
%--
I
----*----
.............................'"1-
1.o
10.0
Wavelength (Microns)
Figure 8.9.
Effects of sufrace finish on emissivity.
Source:
Reproduced from "The infrared and electro optical systems hand book. Vol. 7
Countermeasuresystems,edited by David H. Pollock- Chapter-2 Camouflage,
suppression and screening systems by David E. Schrnieder (section 2.1 to
2.5) with permission from the publishers-ERIM % SPlE Optical Engineering
Press USA (1993)and the author.
Still more spectral reflectivity tailoring can be achieved by going
to multiple layer approach. The technique is comparable to the
approach used in interference filters and has some of the same
tailorability advantages as well as angular dependency limitations.
Figure 8.10 shows the results of efforts to create a coating with low
visible reflectance and high infrared reflectance with a cut-on
wavelength near 3.0 pm60.This result was achieved with a pigment
consisting of a 17-layer, 3 pm thick structure of silicon, silicon
oxynitride and silicon dioxide.
An alternative method of hiding the thermal signature of a
vehicle is to place a thermal barrier directly between the heatproducing object and the sensor, as described in Chapter 5.
277
278
Introduction to Camouflage8a Deception
loo
r
Single pigment flake immerdes
in binder at normal incidence
Wavelength (pn)
Figure 8.10. Theoreticalspectral pezfonnance of pigmnet design with
emiwivity transition at 3 pm.
Sowce:
Reproduced from "Theinfrared and electro optical systems hand book. Vol. 7
Countermeasuresystems, edited by David H. Pollock chapter-2 Camouflage,
suppression w d screening systems by David E. Schmieder (section 2.1 to
2.5) &th permission from the publishers-ENM 8s SPIE Optical Engineering
Ress USA (1993)and the author.
-
Fabrics from both inorganic and organic fibres such a s
polyamides, polybenzimidazole, p ~ l y a m i d e i r n i d e ~and
~
d~minosilicate~~
have been reported for this application. The thermal
protective performance of these fabrics is related to their thickness,
density, air permeability and moisture content.
8.4
COATING MATERIALS FOR CAMOUFLAGE IN THE
VISIBLE REGION
Basically, the concept of camouflage in the visible region is to
confuse the human eye, and it can be accomplished by three
methods, viz., hiding, blending and deception, as already discussed
in Chapter 4 earlier. In all of these methods materials play the central
role. For example, hiding is achieved by naturaI/artificial vegetation,
special coated nets, foam and smoke, blending by using paints of
different colours in disruptive patterns, and deception by the use of
Materials for Camouflage Applications
decoys or dummies of the real objects. The materials used for
camouflage in the visible region in different forms are discussed
below.
8.4.1 Paints
A paint, a pigmented liquid composition which is converted to
an opaque solid film after application a s a thin layer, is essential for
the protection and decoration of the majority of manufactured
metallic goods and architectural and industrial structures which
characterize our complex material civilization. The foremost
requirements of a paint for camouflage application are:
(i) It should match in its optical properties with the background;
(ii) It should be stable;
(iii)It should be corrosion-resistant; and
(iv) It should be non-glossy.
Many of the conventional paints might satisfy the above
requirements and may therefore be used for camouflagein the visible
region because of their matching reflectivity in the region to that of
the background, i.e., vegetation or sandy terrains.
..i
,fl
,'
\
Undercoat
\
\
Topcoat
I
"8
'
:' "
\
/
/,/,<,/;
8
-..
1
Primer
Substrote
Figure 8.11. Paint composition.
Source:
Reproduced from 'The infrared and electro optical systems hand book."vol.
7-Countermeasure systems, edited by David H. Pollock - chapter-2
"Camouflage,suppression and Screening systems" by David E. Schmieder
(section2.1 to 2.5) with permission from the publishers-ERIM & SPIE Optical
Engineering Ress USA (1993) and the author.
279
280
lntroduction to Camouflage 86 Deception
These paints may have one to three separate layer types and
be in the forrn of a primer, undercoat and topcoat. (Fig. 8.11). The
main purpose of the primer is to provide a mechanism for each
successivelayer to adhere to the underlying surface and to a certain
extent to serve against corrosion of the metal. The undercoat (which
is also the topcoat if there is no additional layer)contains the primary
pigment designed to control spectral reflectivity. A transparent
topcoat may be used to control surface roughness, provide abrasion
resistance and contamination protection.
The important coating for camouflage application is the
undercoat and Table 8.2 describes the major constituents and their
functions. Key ingredients of undercoat are the pigments and
binders. Main optical properties of binders are their transparency
and index of refraction; likewise, the main optical properties of
pigments are their index of refraction and opacity. Pigment controls
reflectivity by offering a high index of refraction relative to the binder
medium. In general, reflectivity p for homogenous medium at normal
incidence is given by the following equation
where n, is the refractive index of the binder and n, is that of
the pigment.
Table 8.2. Paint constituents
Pigment (filler)
Primary, material used to impart colour; remains, insoluble,
provides, protection, hardness, weatherability, roughness
Dyestuff
Secondarymaterial used to impart colour; solublein solvents
and/or binder, transparent in their coats; limited uses
Binder (polymer)
Holds pigment particles together, to substrate;
transparent to visible light
Solvents
Provide application mobility, evaporate
Additives
Driers, wetting, antisag, flattening and similar agents
Source:
Reproduced from "The infrared and electro optical systems hand book." vol.
7-Countermeasure systems, edited by David H. Pollock - chapter-2
"Camouflage,suppression and Screening systems" by David E. Schrnieder
(section2.1 to 2.5) with permission from the publishers-ERIMB SPlE Optical
Engineering Press USA (1993)and the author.
Materials for Camouflage Applications
Camouflage coatings adjust the normal reflectance of a n object
so that it resembles its immediate environment, thus making it
indistinguishable from its surroundings under natural as well a s
artificial illumination. For terrestrial applications the most important
environments when blending concealment is desired are foliage and
the desert regions.
A s discussed in Chapter 4, pattern painting with various
camouflage colours can also break u p the sharp boundaries of an
object and make it less conspicuous. For maximum effectiveness,
the various coatings used in the pattern must be significantly
different in both optical and infrared r e f l e ~ t a n c e ~ ~ .
One of the most common pigments in general use64is titanium
dioxide (TiO,), which has a refractive index of approximately 2.8.
Most binders are made from oils or polymers that offer a refractive
index near 1.5.
In addition to influencing the overall optical properties of paints,
binders also strongly determine other importmt general properties
of paint such a s durability, maintainability and adherability. Some
of the common examples of polymers used a s binders in paints are
alkydes (polyester-based), polyesters epoxy resins, polyurethanes,
silicone resins and acrylics. On the other hand, vegetable oils
obtained from oilseeds such as linseed, cottonseed, etc. have
constituted the largest category of binder resins used in the paint
industry. In general, all of the binders can have uses in camouflage
paint formulations. However, some of these binders have unique
properties worth noting. For instance, epoxy resins and polyurethane
resins offer a high degree of flexibility, toughness, abrasion
resistance, and resistance to chemicals. In addition, they offer good
weather resistance and adhesion to metals. Silicone resins, on the
other hand, also provide high levels of heat resistance.
The choice of pigment in camouflage paint is made based on
the type of the terrain as discussed below.
8.4.1.1 Pigments for Forest and Jungle Areas
Pigments used to provide green coatings for these areas are
selected for their ability to duplicate the reflectance properties of
chlorophyll, the green pigment responsible for the characteristic
colour. The reflectance spectrum of green foilage, i.e., leaves, grass,
etc, a s shown in Fig 8.12, exhibits a peak new 550 nm, low values
in the visible red region, a dip in the far visible red a t 650-680 nm,
a sharp rise between 680 and 7 10 nm, and uniformly high values
above 720 nm. The goal for camouflage coating in forest area is to
match this spectrum.
281
282
Introduction to Camouflage & Deception
A
B
C
D
GRASS
YOUNG SYCAMORE LEAF
BEECH LEAF
OLD SYCAMORE LEAF
PHOTOGRAPHIC INFUA-RED
500 550
600
650
700
750
BOO
850
900
WAVELENGTH IN MILLIMICRONS
FIGURE 8.12. Spectrophotometric curves for green vegetation.
Source:
-
Reproduced from Journal of Colour Chemists Association Opticd
properties of pigments in Near Infra-Red, Figure 7, page T 23, Vol. 41,
1958with permission of the Journal of Oil & Colour Chemists ' Association.'
Many green pigments given in Table 8.3 resemble the colour
of chlorophyll, but, unlike chlorophyll, show strong absorption in
the near infrared. Chromium trioxide is green in colour and
possesses a reflectance curve similar to that of chlorophyll and was
the principal pigment in earlier visible and near infrared camouflage
paint. For some specifications which do not call for reflectance to
rise rapidly in the near infrared, chromium trioxide tinted to the
desired visual shade can still be used as the basic pigment.
Various green shades can also be obtained'j6using formulations
based on lead chromate (chrome yellow), basic lead chromate
(chrome orange) and molybdated lead chromate (moly orange) and
tinted with red and blue pigments. However, their use has been
curtailed in United States because of extremely high lead content.
Materialsfor CamoufIage Applications
Table 8.3. Pigments for different types of terrains
Terrain
Light green, dark green
Forest green, Olive drab
green 383
Field drab, Earth yellow
Aircraft gren, olive drab 34087
Sand
Interior aircraft black 37038
Aircraft white 37875
Aircraft red 3436
Aircraft grey Interior aircraft
grey 3623 1
Aircraft insignia blue 35044
Pigment
Acid insoluble green pigments predominantly composed of
cobalt, zinc and chromium oxides with other oxides. Permitted
carbazole dioxazine violet, yellow iron oxide, red iron oxide,
chromium oxide, permanent maroon, light stable organic
yellow.
Yellow iron oxide, red iron oxide, chromium oxide, titanium
dioxide carbon black.
Yellow iron oxide, red iron oxide, carbon black, iron xoide
Yellow iron oxide, red iron oxide, chmmium oxide, titanium
dioxide, carbazole dioxazine violet
Carbon black, black iron oxide
Titanium dioxide
Titanium dioxide, light stable organic red
Titanium dioxide, carbon black, yellow iron oxide
Copper phthalocyanine blue, carbon or lamp black, titanium
dioxide
Source :US military specification MILC-53039(NE),16 April 1984
8.4.1.2
Pigments for Desert Regions
For these regions, natural sand and earth colours in a range of
grey, red, orange, yellow and brown colours must be reproduced.
For desert colours and woodland browns and black, iron oxides
ranging from red to yellow to black, chromium trioxide, titanium
dioxide and carbon black are used.
8.4.1.3
Pigments for Ocean Environments
Paints now used on the hull and superstructure of warships
often exhibit relatively high solar absorption because of the grey
colours required for visual camouflage. These colours may vary from
bluish to greenish grey depending on the waters in which the vessel
is likely to operate and have reflectance near 30%.
Historically, naval coatings have contained significant amounts
of carbon b l a ~ k ~ 'Effective
, ~ ~ . solar heat reflectivecoatings have now
been made in the grey shades established for warships by replacing
carbon black by an organic perylene black which absorbs strongly
in the visible region but is transparent throughout infrared.
In general, most paints are composites of several matenial types.
Therefore, the simple formulae that predict reflectivity for
homogenous materials do not apply to the paints. The reflectivity of
such paints can be predicted from the properties of the medium
and the suspended particulate materials.
8.4.2 Antireflective Coatings
As discussed in Chapter 4, a vehicle, which otherwise is well
camouflaged, may be detected from a long distance while moving in
283
284
Introduction to Camouflage & Deception
daylight due to the glare caused by the reflection of the visible portion
of the sunlight. The glare a t the windscreen can be controlled either
by fixing a mechanical gadget in front of the screen or by applying a
thin and transparent coating of a metal oxide or a polymeric
substance, on to the wind screen surfaces.
The underlying principle69for a material to be antireflective on
a substrate, for example, glass, is the following :
(i) n2 =
where
,/F
n,
8-10
refractive index of glass (1.5)
= refractive index of the material
n,
= refractive index of air (1)
n,
(ii) thickness (d) of the coating should follow the relation
=
where h is the wavelength of light
Materials showing antireflective characteristic on glass are
discussed by Ritter70. A few of s u c h material are thorium
tetrafluoride, cerium trifluoride, magnesium oxide and titanium
Oxide.
Antireflective coatings from these materials are obtained by
depositing single layer of a substance or multiple layers of more
than one substance of thickness d. The coating of metal oxides on
glass substrates is done by using one of the following methods:
Plasma vapour deposition
Vacuum deposition
Chemical vapour deposition
Spray pyrolytic, and
Dip coating/sol gel
Spray pyrolytic and dip coating/sol gel techniques are
commonly used for coating large-sized substrates. Organometdlic
compounds containing metal-carbon or metal-oxygen (alkoxides)
are employed as the starting materials. Thin film coating procedure
by using dip coating technique is shown in Fig 8.13.71
8.4.3 Aqueous Foam
Foam which is a system consisting of dispersion of gaseous
particles in liquid or solid medium is a multicomponent material.
Solid foam, i.e., dispersion of gas in solid medium, is known for its
thermal insulation and cushion applications. Liquid foam, i.e.,
Materials for CamouflageApplications
dispersion of gaseouslair particles in liquid (aqueous) medium, is
used for household/industrial cleaning, laundry and fire fighting
applications.
Oxide film
Reaction
products
(0.07pm)
>
H20
<.-- (Vapor)
----- -.Oven
--- - --
.
-
Figure 8.13.
Solvent
- -..
(400-500OC)
-*--.
>
Antireflective coating by dip coating technique.
Though liquid foam, (Fig 8.14), is made mainly of a gas (air)
and a liquid with dissolved/dispersed surfactant molecules, its
physical properties w e far removed from those of its constituents.
For example, foam behaves both like a solid and a liquid. Because
of the presence of thin liquid films, it offers large interfacial area for
transfer processes to occur.
These special characteristics of foam have indeed been used to
develop a number of industrial applications. The first use of foam
was perhaps made by the insect froghopper. The nymph of this
species secretes foam a s soon a s it hatches out from the egg and
285
286
Introduction to Camouflage& Deception
covers itself with it to get protection not only from predator but also
from rain and the sun. The rigid structure, its large surface area,
colour and entrapped air, are responsible for these special properties
of liquid foam. The same properties of foam are utilized for crop
protection from frost and prevention of heat losses in greenhouses.
Figure 8.14. Structure of foam (dispersionof gas in liquid media).
Source :
Reproduced from Organic Coatings Science and Technology by O.D.Parfitt"Dispersion of Gas in Liquid media' with permission of Marcel Dekker Inc.
New York.
Because of the special structure and low liquid content, foam
is ideal for containing material and is used to reduce coal dust
explosions in coal mines. Further, the addition& property of foam
to distribute the contained material uniformly throughout the
medium has been used widely in the fabric industry to distribute
finishing agents such as dyes or resins on fabrics. During the
recovery of petroleum from oil wells foam is used in many ways,
e.g., to remove water, as a drilling fluid, or a diverting agent.
In addition to the numerous industrial applications as
mentioned above, foam is now seriously considered for camouflage
in the visible region of large static objects such as runways,
connecting roads, combat vehicles, minefields, and headquarters'
buildings, by producing them in different colours to match with the
background. The advantages of using liquid foam for camouflage
applications are many, and some of them are given below:
A free liquid foam can easily be produced right on the site and
also removed easily with water or simple mechanical device
after its utility;
Materials for Camouflage Applications
287
It can be spread over a large area to cover tracks and roads in
minutes. Foam is time-saving;
It is adaptive to the surroundings. Pigmentation can be created
in a dye mixer, allowing colour variations to s u i t the
surroundings. Besides, texturally it matches with the
background;
Tanks and trucks leave highly visible tracks. These tracks reveal
the target even after the vehicles themselves have been
successfully camouflaged. The use of foam in covering these
tracks minimizes the threat of detection even in the infrared
region.
The materials used in generating these foams are air, water,
c h the alkali metal salts, alkyl
and foaming a g e n t ~ ~ ~ - w h iare
sulphates, alkyl aryl sulphonates, quaternary ammonium salts,
metal soaps, alkyloamides, etc, while stabilizers include long chain
fatty alcohols and alkyloamides. By suitable combination of the
foaming agents, colouring agents and stabilizers in water, foam in
any colour and varying stability can be generated by passing air
through the foaming composition.
8.4.4 Smoke
Smoke has already been referred to in Chapter 4. Suspended
solid particles in gaseous (air) medium were used for the first time
during World War I for the protection of infantry reserves and river
crossing from enemy's observations. Early World War I smokes which
were black, proved unreliable and unstable, and were subsequently
replaced by white phosphorous and smoke generated from heating
a mixture of carbon tetrachloride, zinc metal and he~achloroethane~~.
After World War I1 it became apparent that i) smoke,
deployment depends upon knowledge of terrain, circumstances,
geography, meterological conditions, ii) smoke can be very effective
in denying enemy observation, thereby degrading the enemy's direct
and indirect combat power, iii) even the most effectively generated
smoke becomes useless if either misplaced (insufficient time to
deploy, wrong wind direction, etc.) or mishandled (insufficient
planning, inexperienced operators, poor training, etc.), and iv) smoke
from white phosphorous, fog oil, or hexachloroethane can seriously
degrade optical sighting systems including ATGMS, visual sighting
system and the neodymium laser, a type used extensively in range
finders and target designators.
Smoke tactics a s well a s the smoke itself are now considered
as combat multiplierss0 as they can be used to deny the enemy
information about one's own measures and emplacements;
288
Introduction to Camouflage & Deception
reduce the efficiency of enemy's target detection;
obscure terrain features from enemy's airforce;
interrupt enemy operations on the battlefield;
surprise the enemy; and
deceive the enemy.
Further, computerised war gaming74has shown that the use
of smoke can reduce friendly losses by 25 percent and slow the
enemy rate of advance by 50 percent.
The primary attenuation mechanism in smoke, or, for that
matter, in aerosol or dust particles, is the scattering of light. The
scattering efficiency is determined by the relationship between the
distribution of particle sizes and the wavelength of the detector's
operation. The highest scattering efficiency occurs when the particle's
radius and the wavelength of the radiation are nearly equal
[assuming spherical particles). Some of the commonly used materials
for generating smoke are white phosphorous, hexachloroethane,
fog oil, and diesel fuel fog. Smoke is generated from pyrotechnics,
grenades or vehicle engine smoke systems, and can be deployed in
four different ways in the battlefield, viz., obscuring, screening, decoy
and masking.
In order to reduce the threat of detection from increasing use
of sensors working in the mid- and far infrared bands programmes
are under way to device new munitions that provide protection in
these bands.
8.4.5 Nets
A s discussed earlier in the Chapter on Visual Camouflage, nets
are used extensively to give coverage to the strategic military targets
against reconnaissance. This is accomplished by providing coloured
patterns to the fish net (garnish) similar to the surroundings, while
maintaining the consistent continuation of surroundings contours.
This aspect is incorporated while using camouflage net with the help
of a superstructure. These nets are incised to produce visual texture
and movements (i.e., similar to leaf movement].The visual camouflage
nets are usually manufactured in three colour combinations
(woodland, desert and snow) and two basic types (radar scattering
and radar transparent). In addition to garnished net, open cell nets
of strong plastics such as polypropylene are also available. These
nets, because of their low density, high strength and large area, could
be covered without actual net draping or "umbrella points"49.
8.5
MATERIALS FOR MULTISPECTRAL CAMOPJFLAGE
In the modern era of reconnaissance systems that operate in
more than one region of the electromagnetic spectrum, both the
Materials for Camouflage Applications
design and material development goal concepts expand to
multispectral camouflage, i.e., to cause protected items to become
indistinguishable from the background in the view of a designated
set of sensors at some set of designated ranges. Since about 1970,
camouflage systems, mostly screens or nets, have incorporated
protection in visual, near infrared, and radar spectral ranges, and
are thus multispectral to a degree. The main element missing todate is some treatment of the 3 to 5 pm and 8 to 12 pm infrared
spectral regions. The international camouflage community has
acknowledged the existence of this gap and a great deal of work is
being carried out to solve this problem.
For material development the main concern is to achieve surface
modification, through application of coatings, of objects and
structural material of objects in order to give multispectral
camouflage effects. Some of the measures are discussed below.
8.5.1 Surface Coatings
As on today there is no single material which can be used in
the form of coatings to give signature suppression in multispectral
wavelength regions. However, as has been discussed in previous
sections, materials are available for the individual regions. Designed
successive coatings of these paints thus can meet the objective of
multispectral camouflage provided they are compatible. Design of
some of the materials like conducting polymers may probably provide
visual camouflage during the day and absorb radar enerw, for
example, a t night. However, it appears that these coatings cannot
be an effective RAM and camouflage a t the same time75.
8.5.2 Composites
The development of advanced composites has certainly been
important, and may be even more so in the near future, for the
radar absorbing structures. Thermoplastic matrix composites offer
high structural strength, low cost, and good absorbance. Reinforced
carbon-carbon (RCC) - produced by laying u p carbon fibres in a
special matrix, which is then baked and carbonized - is strongly
radar absorbent and heat resistant, and, with additional loading
with suitable materials, is likely to play a role in multispectral
camouflaged structures. Poly-p-phenylene-benzobis-thiazole (PBT)
doped with iodine by ion implantation method76 shows better
conductivity than that of carbon-impregnated composites ahd is
considered as a better radar absorbing structural material.
At present no suitable surface coating or structural
multispectral camouflage material seems to be readily available;
289
290
Introduction to Camouflage & Deception
however, concentrated efforts are on. One of the approaches being
pursued in this regard is to make a combination of pigmentation
and texture with radar absorbing properties to combine visual and
near infrared camouflage with substantial reduction in radar cross
section. Further, a design approach is likely to extend these
characteristics to the infrared wavelengths.
8.5.3 Multispectral Camouflage N e t s
Multispectral camouflage nets have recently been developed
by Ball Corpn. in USA. These nets make use of light weight materials
assembled a s a series of 1-inch (2.5 cm) bands - separated by open,
yet tightly woven, small fibres which weigh less than 1.5 kg/m2.
Two persons can unpack and assemble the net system over a n F15 or F- 16 fighter, without touching the vehicle, in about 15 minutes
without any special support49.
Tests of these nets had shown that they will withstand wi~lds
upto 60 mph (100 kmph). The nets' open weave also permits snow
and rain to pass through, avoiding snow and water accumulation
that could collapse the light structures. From the outside, sunilluminated nets appear to be opaque. Looking from inside through
their relatively open weave allows enough natural light to pass
through so that maintenance personnel can easily work on sheltered
aircraft inside.
These nets are available a s double-sided units with patterns
suitable for different environments, i.e., snow and partial snow,
concrete and asphalt, forest green, and sand. Further, the net
materials have 1R shielding and capabilities for absorption of radar
energy. Exactly how the net material accomplishes visual, IR and
radar camouflage is a closely guarded secret.
8.6
MATERIALS FOR ACOUSTIC CAMOUFLAGE
Submarine tiles cast from rubber or neoprene compounds
containing macro or micro air-filled cells have been used for several
years to reduce the acoustic signature of submarines. These tiles
are designed specifically to meet the most stringent acoustic
requirements and a t the same time to provide the lowest global
volume compressibility vs depth.
The following four main types of materials which are usually
glued in place on a submarine
are available for the control of
underwater acoustic signature:
Materials for anechoic treatments which absorb active sonar
through viscoelastic loss and local strain deformation;
Transmission loss decoupling materials which act as reflectors,
reflecting incident acoustic energy away from a source, in order
Materials for Camouflage Applications
to reduce a submarine's own signatures, and decoupling
internally generated noise from the surrounding water;
Vibration damping materials which act a s mechanical
absorbers; and
Flow noise reduction acoustic coatings designed for protection
of acoustic transmitters on a submarine.
The choice of adhesives is of key importance for their successful
installation. The adhesive must be compatible with both the acoustic
material and the substrate (or with any anticorrosion primer applied
to the substrate). Epoxy is found a s a suitable adhesive.
Recently, spray-on acoustic coatings based on polyurethane
have been reported77 to replace acoustic tiles. Other polymeric
candidates for acoustic camouflage are interpenetrating network
which are intimate mixtures of two polymers with
polymers (IPNS)~~
high and low glass transition temperatures cross-linked together.
Further, in many active control systems, solid piezo-ceramics
are used a s the actuating device^^^.^^ since they offer high
electromechanical coupling, linear transmission responses and
flexibility that lend to coatingss1. Two s u c h piezocomposite
candidates include piezorubber and piezoceramic rods in polymer.
8.7
FUTURISTIC CAMOUFLAGE MATERIALS
The materials described thus far produce fixed properties such
a s colour, reflectivity, emissivity and absorption, in different
segments of the electromagnetic spectrum. It means that the
camouflage is a n average or "best guessn design based on the most
likely background conditions. The ideal expectation from a material
for camouflage, however, is its ability for adaptive signature control
of the object in different segments, i.e., visible, infrared and
microwave, of the electromagnetic spectrum, and its operation under
different background conditions. Some of the futuristic materials
for camouflage are discussed below.
8.7.1 Chromogenic Materials
Some existing and proven technologies in other areas offer
opportunities for adaptive signature control, For instance, passive
and active technologies available for visible and infrared applications
in solar energy and display device areas could be used in camouflage
to better match background conditions over the long term. Though
the practical application of these technologies to camouflage
requirements is in its infancy, their general principles are discussed
here.
291
292
Introduction to Camouflage & Deception
Adaptive materials (coatings) can be grouped into categories
named after the mechanism responsible for the adaptation process.
Materials whose optical properties are subject to change by the
application of external stimuli are called chromogenic. Some of the
major chromogenic materials are :
Thennochromic: Optical properties are reversible under the
influence of temperature. Example : cholesteric liquid crystals;
Electrochrornic: Optical properties are reversible under the
influence of an electric field. Examples: viologenes, conducting
polymers:
Photochromic: Optical properties are reversible under the
influence of incident radiation flux. Examples: Inorganic complexes,
organic dyes and conducting polymers.
There are many other materials reported in the l i t e r a t ~ r e ~ ~ - ~ '
showing these properties. Such materials, are now being considered
for giving adaptive camouflage in the visible region just like a
chameleon does.
8.7.2 Luminescent Materials
One of the conducting polymers, viz., polyphenylene vinylene
(PPV), showing very good luminescent properties associated with
its processing advantage of being a polymer, looks like a good
candidate to replace liquid crystals (LCs) in many applicationsa8.
There are further interesting possibilities of using this material in
both active and passive camouflage application in the optical regionsg.
In passive camouflage PPV would be used in a similar way as
is camouflage paint today. It could, however, also be tailored to
form part of an active system: a sheet of PPV film could be modified
to emit in specific colours a s required for a particular application,
and attached to an intelligent processing and environmentalsensing
system. Possible applications for this active approach to camouflage
therefore include:
(i) Camouflage sheet to cover vehicles or facilities ;
(ii) Optical stealth coatings or foils for vehicles applied to outer
hull of land vehicles, aircraft and even submarines and ships.
For aircraft applications, the coatings on the underside would
reproduce what the platform's sensors see above the aircraft. This
active deception ploy, plus the speed at which the aircraft travels,
would make it almost impossible for an enemy gunner to track his
target optically. In submarine applications, this material promises
the means to defeat a new mode of detection in antisubmarine
warfare - the blue-green laser.
Materials for Camouflage Applications
8.7.3 Polymers and Compssites
The prime focus of materials research in the polymer
compounds and composites field to-date h a s been "passive"
applications, many of which involve substitution of metals in existing
applications. The driving force for advances in this area has been
the composite paradigm (anisotropic design) and computer-aided
design, manufacture and modelling, and the underpinning detailed
molecular level understanding from advanced characterization and
measurement facilities.
What is required for multispectral camouflage and other
applications? The future lies in the ability of these materials to
integrate many functions in order to act a s "activenor "perceptive"
or "intelligentn materials. Since this emerging area will be new to
many, brief definitions of the terminologies are given below:
An intelligent rnaterial/system is one which is capable of
understanding and of obtaining information;
A perceptive material/system is one which is capable of intuitive
recognition or action by which response to external signals/stimuli
may be interpreted and acted on.
Polymer composites which comprise high performance
polymeric matrix have replaced metals and metal alloys in many
structural applications in aerospace, transport a n d marine
industries since these materials offer the advantages of lower specific
gravity, higher specific tensile modulus and tensile strength a s
compared to those of metals. Two high modulus fibres in use for
making composites for structural applications are Kevlar developed
by Du Pont and Twaroon developed by Akzo, a Dutch company.
Although still under development, many of the newer composite
structures will combine excellent absorption characteristics with
physical attributes such as high tensile and compression strengths,
resistance to impact, fuel and hydraulic fluid tolerance, and light
weight. Several materials scientists and aircraft manufacturers are
working on the design and development of these composites to meet
the multispectrd requirements, and some of their products probably
are being employed in the next generation aircraft such a s B-2
bomber and advanced tactical fighter.
Two classes of new polymers, i.e., Piquid crystalline polymer
and conducting p o l p e r , possess unique combination of rnechsenical,
electrical, optical, etc. properties, and a n ample scope for tailoring
these properties through 'molecular design'. This provides a n
excellent opportunity to development into "perceptive"multispectral
camouflage materials, both a s surface applique and structural
materials in the form of composites for strategic military objects.
293
294
Introduction to Camouflage & Deception
REFERENCES
Clark. D.J. Magnetic oxides (Part 2). J o h n Wiley & Sons, New
York, 1975.
2. Bboemargen, N. & Wang, S. Phys. Rev., 1954 9 3 , 72.
3. Suhl, M. J. Phys. Solid., 1975, 1, 209.
4. McCauly, J.W. Malpin (Jr), B.M.; Hynes, T., & Eite1men.D.
Ceram, Eng. Sci. Proc., 1980, 1 (7-8), 356.
5. Mitushi Toatsu Chemicals Inc., J a p a n Kokai Tokyo Koho 09
NOV 1983, 3P,58,192-201.
6. Vardan, V.K.; Vasundra Vardan, V.; Ma, Y. & Hall W.F. IEEE
Trans. Microwave Theory Tech. 1986, 34(2), 257.
7. Ozaki T. & State, T. J a p a n Kokai Tokyo Koho. 17 May 1979,
7961,231.
8. Kishimito A.; Yoshino, H.; Watanbe, T. & Hashimoto, Y. Japan,
1 6 Sept 1977, 08,110,500.
9. Nicolas, J. Rev.; Phys. Appl, 1974, 9 , 847.
10. Newnham, R.E.; Jang, S.J.; Ming, Xu, & Joe, F. Ceramics
Transactions, 1991, 2 1,5 1.
1 1. Kenkre, V.K. Ceramic Transaction, 199 1, 2 1 , 69.
12. Kharadly, M.M.Z. & Jackson W. Proc Institute El. Engg. 1953,
9100, 199.
13. Collin, R.E. Field theory of guided waves (2nd Ed.). New York,
1991.
14. Doyle, W.T. & Jacobs, I.S., Phys. Rev., 1990, 4 2 (15), 9319.
15. Russel, N.E.; Garland, J.C. & Tanner D.B. Phys. Rev. 1981, B
2 3 , 632.
16. Jacobs, I.S. Advanced artificial dielectric materials for millimeter
wave length application. Schenectady. 1990, Report 90-SRD0 0 1, GE CRD.
17. Shirakawa, H.; Louis, E.J; Mac Diarrnid, A.G. & Heeger, A. J.
J. Chem. Soc. Chem. Commun. 1997, 578
18. Kanazawa, K.K. ; Diaz, A.F. Geiss, R.H. ; Gill, W.D. ;Kwak J.F. &
Street, G.B., J. Chem. Soc. Chem. Commun., 1979, 854.
19. Lin, J.W.P. & Dudek L.P., J Polym. Sci. Polym. Lett. (Ed.) 1980
18,348
20. Rabolt, J.F.; Clark, T. C. ; Kanazawa, K.K. ;Reynold, J .R. & Street
G.B. J. Chem. Soc. Chem. Cornmun., 1980,347.
2 1. Oshaka, T.; Ohnuki Y.; Oyama, N; Katagin, G. & Kapisaka K.
J. Electroanal. Chem., 1984, 161, 399.
1.
Materials for Camouflage Applications
22. Chance, R.R.; Shacklette, L.W.; Mitler, G.G.; Ivory, D.M.; Sowa
J.M., Elsenbaumer R.L. & Baughman, R.H. J. Chem. Soc. Chem.
Commun., 1980, 348.
23. Shacklette, L.W.; Chance, R.R.; Ivory, D.M.; Miller, G.G. &
Baughman, R.H. Synth. Met., 1979, 1,307.
24. Malhotra, B.D.; Kumar, N. & Chandra, S. Prog. Polym. Sci,
1986, 12, 179.
25. Ito, T.; Shirakawa, H. & Ikeda, S. J. Polym. Sci. Polym. Chem.
(Ed)., 1974, 12, 11.
26. Gau, S.C.; Milliken, J ; Pron A.; MacDiarmid, A.G. & Heeger,
A.J. J. Chem. Soc. Chem. Commun. 1979, 662.
27. Tourillon, G. & Garnier, F. J. Electroanal. Chem., 1982, 135,
173.
28. DosSanto, M.C. & de Melo, C.P. Solid State Commun., 1984,
50, 389.
29. Kaufrnan, J.H.; Colaneri, N.; Scott, J.C., & Street, G.B. Phys.
Rev. Lett., 1984, 5 3 , 11000.
30. Hayes, W.; Contemp. Phys., 1986, 26, 421.
31. DosSantos, M.C. de Melo, C.P. & Brandi, H.S. Solid State
Commun, 1 9 8 4 , 5 2 , 9 9 .
32. Javadi, H.H.S.; Cromack, K.R.; Mac Diarmid, A.G. & Epstein
A.J. Phys. Rev., 1989, B39, 3579.
33. Javedi, H.H.S. Microwave. J., 1989, 162.
34. Colaneri, N. & Shacklette L., IEEE Trans. Instrum. Meas., 1992,
41, 2891.
35. Dudeck, K. & Buckley, L. IEEE Trans. Instrum. Meas., 1992,
41, 5.
36. Joo,'J.; Moss, B. & Burford, R. Phys. Rev., 1994, B49, 2977.
37. Joo J . & Epstein A.J. Appl. Phys. Lett., 1994, 6 5 , 18 & 2278.
38. Kohlman, R.S. et al, Phys. Rev. Lett., 1995, 74, 5 & 773.
39. Buckley, L.J. & Eashoo, M. Synth. Met., 1996, 78, 1-6.
40. Epstein, A.J., & MacDiarmid A.G. Science and application of
conducting polymers. Adam Hilger, New York, 199 1, 141.
41. Vardan, V.K.; Vardan, V.V., Lakhatia, A. J. Waver-Muter,
Interact., 1987, 2, 71.
42. Knoth, A. International Defence Review. 1994, 6 , 93.
43. Shibaev, V.P. & Lui Lam. Liquid crystalline and mesomorphic
polymers. Springer-Verlag, New York, 1993.
44. Lindman, K.F. Ann. Phys., 1920, 6 3 , 621.
295
296
Introduction to Camouflage & Deception
45. Landman, K.F., Ann. Phys., 1922, 69, 270.
46. Lakhatia, A; Vardan, V.K., & Vardan, V.V. Time-harmonic
electromagnetic fields in chiral media. Springer Verlag, New
York. 1989.
47. Stupp, S.I.; Son, S; Lin, H.C. & Li, L.S. Science, 1993,259,59.
48. Aviation Week and Space Technology. Washington, 1987, 22.
49. Schmieder, D.E. & Walkar G.W. Infrared and Electrooptical
Handbook, 1993, 7 , 157.
50. Holst, G.C., Armor, 1984, 20.
51. An infrared spectroscopy atlas for coating technology.
Federation of Societies for Coating Technology, Blue Bell PA.
1990.
52. McCann, J.E. Surface Coatings. Australia, 1990, 27, 8.
53. Mar, H.Y.B & Zimmer, P.B. US Patent, 4, 131,593, Dec. 1978.
54. Wake, L.V. J. Oil & Colour Chem. Assoc., 1990, 73(2),
78.
55. Taylor, D. J. Oil and Colour Chem. Assoc., 1958, 41, 707.
56. Sward, G.G. &Jacobson, A.E. Paint testing manual (13th Ed.),
Special Technical Publication, 500, Am. Soc. Test Mater.,
Philadelphia PA, 218, 1972.
57. Hecht, E. & Zazac A., OPTICS, Addison-Wesley, Reading, MA,
1979.
58. Edward, D.K. & Catton, I. Radiation characteristics of rough
and oxidized metals In: Advances in therrnophysical properties
of extreme temperatures. S. Cratch, (Ed.).American Society of
Mechanical Engineers, 1965.
59. Hagen, E. & Rubens, H. Annalen. de. chimique Physique, 1904,
2, 441.
60. Palik, (Ed.) Handbook of optical constants of solids. Academic
Press, Orlando, FL, 1985.
61. Carlesson, D.J.&Wiles, D.M. Cand. Text. J., 1973, 90(6),
107.
62. Pvidal, J.; Sauman, Z.; Kashnik, F.; Franc, V. & Hampel, M.
Czech. CS 192.137.37, J a n 1982.
63. Pusch, G.; British patent, 1 605, 131, 1981.
64. Surface Coatings (vol. 1) 2nd Ed. Tafe Educational Book. Oil
and Colour Chemists Association, Kensington, Australia, 1983.
65. US Military Specifications MIL-C-53039 (ME) 16 April 1984.
66. US Military Specification MIL-E-46117A Enamel, Alkyd,
Lusterless, Solar heat reflecting, Olive drab, Oct 6, 1970.
Materials for Camouflage Applications
67. US Federal Specification TT-P-490E, Enamel, Silicone Alkyd
Copolymer, Semigloss for Exterior and Interior Non-Residential
use, September 25, 1975.
68. US Military Specification DOD-E-24635, Enamel, Gray, Silicone
Alkyd Copolymer, Semigloss (for Exterior use) September 13,
1984.
69. Coss J.T. & Hass, G. Physics of thin films. Academic Press,
New York 1965, 2, 223.
70. Ritter E. Physics of thin films. Academic Press, New York, 1975,
8 , p. 42.
7 1. Dislich, H. & Hussman, E., Thin solid film. 1981, 77, 129.
72. Noguchi, S. Kogakuo to Seibutsu. 1972, 10 (31, 199-203.
73. Piette, P. St. Artificial aerosols. Naval Research Lab
Memorandum Report, 4197, April 1983.
74. Washer, R.J. & Flack, L.T.G. Smoke obscuration symposium
IV, April 1982.
75. Aviation Week and Space Technology. 1993, 136.
76. Chen, C. & Naishadham, K., IEEE Proceedings South Eastern
1990, p.38.
77. Marine Defence, March 1994, p.26
78. Capps, R.N. J.Acoustical Society of America, 1983, 73, 2000.
79. Bailey, T. & Hubbard, J.E. (Jr.).J. Guid. Control, 1985, 8, 605.
80. Tzou, H.S. & Gadre, M. J . Sound. Vibration, 1990, 136, 477.
81. Newnham, R.E. Chem. Tech., 1987, 38.
82. Granqvist C.G. Spectrally selective surfaces for heating and
cooling application. (Vol.TTO I), SPIE Optical Engineering Press,
Bellingham, WA, 1989.
83. Lampert, C.M. & Granqvist, C. G. Large-area chromogenic
materials and devices for transmittance control. (Vol IS041 SPIE
Optical Engineering Press, Bellingham, WA, 1988.
84. Berglund, C.N. IEEE Transaction on Electron Devices, 1969,
16(5),432.
85. Morin, F.J. Phy. Rev. Lett., 1959, 3, 34.
86. Goodenough, J.B., Phys. Rev., 1960, 117 (6), 1442.
87. Soward, G. et al, Proc. SPIE., 1987, 823, 90.
88. Kumar N.; Vadera S.R.; Singh, Jeevan Dass G.; Negi S. C,
Aparna P. & Tuli A., Def: Sci. J., 1996, 46, 9 1.
89. International Defence Review, 1993, 9 15.
297
STEALTH TECHNOLOGY
9.1
INTRODUCTION
The concept of stealth is not new to warfare. From ancient
times, stealth has been in use in various forms. Modern stealth
technology has its roots somewhere prior to World War I1. Probably
the need for stealth has arisen ever since the aeroplane became an
instrument of war.
Stealth, as it stands today in modem war, has become a means
of survival for any modem weapon platfom/weapon delivery system/
weapon, in all the theatres of war - air, sea and land. Broadly
speaking, by stealth is meant the act of avoiding detection of any
weapon platform employed in offence, by all possible sensors which
the enemy may possess and put into operation. However, the term
'stealth' is more often associated with the act of defying detection by
radar which has become a highly potent threat sensor with a long
range capability. Initially the thrust in the development of stealth
technology was against air defence systems. Consequently, R&D
efforts were directed towards making jet fighters and bombers
undetectable by enemy's radars. Today stealth technology has
extended to naval ships on sea, torpedoes inside sea, and even to
tanks and other vehicles on land.
Stealth technology is inter-disciplinary and a complex synthesis
of several technologies which are diverse in naturei. It has to embody
countermeasures to detection by radar, infrared, visible and acoustic
and other types of sensors. The technologies developed or being
developed towards achieving this objective are also known as low
observables or low observable technologies.
The aim of stealth techno lo^ is to reduce the probability of
detection and thereby accomplish the mission successfully. A
dynamic and integrated approach towards accomplishing a balanced
multi-spectral camouflage against the threat sensor system of today
is essential to meet the requirement in the continuously changing
war scenario.
300
Introduction to Camouflage & Deception
9.2
WHAT IS STEALTH?
In the layman's language, the meaning of the word 'stealth' is
the act of doing a thing so slowly, quietly and secretively that it
cannot be noticed by others. A s has been explained in chapter 3,
stealth is present in nature too2. From time immemorial, man as a
hunter while approaching his victim has been adopting stealth.
In short, stealth comprises various means employed in offence
to avoid detection by the other party. One typical example where
stealth plays a very important role is the fighter aircraft. The aircraft
in the air is seen conspicuously against a uniform background if it
is not made stealthy. Similarly, a ship on a uniform background of
sea and/or sky can be easily detected unless made stealthy. Ofcourse,
on land, there is a lot of heterogeneity for a military object such as
a tank. Tanks of the future may also have to be made stealthy.
Stealth technology or low observable technology deals with the
design of weapon platforms from the begining stage itself to include
low observable features a s a major design goal, rather than a s a
retrofit capabiliw.
9.3
HISTORICAL BACKGROUND OF STEALTH
TECHNOLOGY
The history of modern stealth technology has its beginning in
the early 1900s' with its application to aircraft. Initially, in Germany,
transparent materials for aircraft wings, fuselage and empennage
were used in an attempt to render the aircraft 'invisible'. In 1912' Lt
Eduard Nittner, a n Austro-Hungarian airforce officer, flew a
monoplane with its external parts covered with a transparent
material, known as emaillit, which was derived from celluloid. When
the plane was flying at a n altitude of 900 feet (300 m], it was invisible
to observers on the ground. At a flying altitude of 700 feet (200 m),
the internal framework of the outer frame was faintly visible.
Germans during the World War I used cellon - another transparent
material - to cover outer parts of aircraft, but without much success.
In 1935 the Soviets1employed another transparent material called
rodoid for covering the airframe and applied white paint to the
internal parts to render them difficult to be seen through the
transparent outer frame. Although the aeroplane YakovPev Air-4 could
not be spotted from the ground, its inner white frame was visible
from a distance of about a few hundred feet.
The advent of radar, during World W a r 11, necessitated the
development of a new stealth technology for hiding a military aircraft
from radar. Stealth projects were undertaken by United States and
Stealth Technology
Germany during that period1. Attempts to employ radar absorbing
materials were made for the first time. In 1945, Northrop in US
developed a radar absorbing material known as MX-410'. This
material, although somewhat effective in reducing the radar return,
when applied with several coats, increased the weight of the aeroplane
considerably, which adversely affected the flying capacity.
Subsequent developments and specific details of the stealth
technology are not known in detail a s the subject is highly classified.
On August 22, 1980 the United States government a t a press
conference1 held at the Pentagon officially disclosed that they have
a Stealth Technology Programme.
The development of ground-launched and air-launched missiles,
with radar fire control systems, subsequent to World War 11, had
substantially enhanced the effectiveness of air defence systems. Thus
the capabilities of radar as a primary means of detecting aircraft
and directing fire against them had become abundantly clear. This
necessitated the development of techniques to frustrate radarcontrolled air defence systems. Initially, Electronic countermeasures
(ECM) were employed to reduce the effect of radars1. United States
and Russia simultaneously initiated R&D work leading to technology
to degrade the effectiveness of radars. Although air defence systems
were employing other types of sensors in addition to radar, the thrust
of R&D activity was primarily directed towards a technology to defy
detection by radar.
The early versions of the technology were initially applied to
reconnaissance aircraft1, and subsequently extended to various
weapon platforms. However, in future, the technology has to take
care of all possible sensors by which the weapon platforms may be
detected.
9.4
MILITARY OBJECTS REQUIRING STEALTH
In general, any military vehicle in flight, in air, sea surface or
sub-surface and land, which cannot be camouflaged by conventiond
methods need the cover of stealth.
J e t fighters and bombers are two important classes of aircraft
requiring stealth as they are under constant exposure to fighter
planes and ground-to-air missiles. F- 117A Stealth Fighter Aircraft
developed by Lockheed, and B-2 Stealth Bomber developed by
Northrop for US Air Force, are two such examples. Besides the aircraft
proper, antennas employed in these aircraft for their own radar
systems, such a s Slotted Planner Array and Conformal Phased Array
type, a s well a s radomes which cover radar and microwave antennas,
need stealth protection. Besides manned aircraft, unmanned aircraft
301
302
Introduction to Camouflage & Deception
such a s Remotely Piloted Vehicles (RPVs) need the application of
stealth technology.
All major warships which are constantly under surveillance of
the enemy's radar, infrared and other sensors and targets of missiles
and anti-ship missiles do need the application of stealth technology.
In order to avoid detection of ships by cruise missiles which fly very
low, Air-borne-Early-Warning Airships provided with stealth are
employed. In order to avoid detection by ships and other submarines
and Anti-submarine Warfare (ASW) aircraft, submarines employ a
variety of countermeasures.
The torpedo, the underwater weapon which is deployed either
from submarine or from aircraft or helicopter, should have a highly
sophisticated degree of stealth technology in order to successfully
complete its mission. Missiles also need the capacity to remain
undetected just as much a s their targets. Likewise helicopters have
to be stealthy.
In general, stealth can be applied to any military object. The
relative importance of the object and its vulnerability to the various
sensors and the effectiveness of stealth and cost are the factors
which must be taken into consideration1.
Radar threat has been constantly increasing day by day.
Developments in terms of range, resolving power and response time
are taking place rapidly. Further developments in digital filtering
and signal processing will make radar more and more effective. The
potential of SLAR and SAR provide the greatest threat to ground
targets. Also, substantial developments in millimeter wave radar
are taking place. These extend the application of stealth technology
to other objects of military importance in addition to demanding
improvements in the existing low observable technologies.
9.5
STEALTH AIRCRAFT
The advent of radar guided missiles in 1950s4necessitated antidetection methods for aircraft. Initially, electronic countermeasures
- such a s jamming, muffling or distorting countermeasures - were
in use. These measures were found to be inadequate with the
development of a new generation of Surface-to-Air Missile (SAMs).
Then R&D work on manned stealth fighter aircraft began around
mid-1970s. Although the techniques of stealth were not new to
aircraft designers, the means to apply the techniques were not
available. The application of stealth technology to fighter aircraft has
made quantum jumps with the advent of supercomputers and
availability of composite materials. The former enhanced the speed of
Stealth Technology
aircraft design and the latter provided the right type of materials for
airframe and structure1. Of the various stealth aircraft, the F-1I7A
Fighter Aircraft and the Boeing B-2 Advanced Technology Bomber of
the U S Air Force will be described here as given in the literature1.
9.5.1 LockheedJAir Force F-117A
The F-117A was developed under US Air Force programme
designated as CSIRS (Covert SurvivableIn-Weather Reconnaissance/
Strike).This is part of a highly classified American "black" programme
under the code name 'Have Blue'. A series of studies carried out in
early 1973 led to the development of F-117A. Encouraged by the
results obtained in these studies, US Air Force invited proposals
from the aerospace industry for the construction of the prototype
for demonstration. A new name, 'Experimental Stealth Tactical (XST)'
was given to the programme. Several companies had responded.
The production contract was given to Lockheed in 1976. The
requirements for the aircraft were that it should have : i) very low
RCS in all aspect angles, in particular'head on', ii) reduced infrared
signature, iii) reduced acoustic signature, iv) reduced visual
signature, and v) ability to cany ECM/ECCM/ESM equipment, so
that it may be fielded a s an effective stealth aircraft.
Lockheed entrusted the project to its Skunkworks. The
prototype flew in November 1977 a t the Tonopah Test Range located
in Nellis AFB, near Las Vegas. It was proved to be effective against
radar, infrared, optical, acoustic and electronic detection systems.
The US government awarded Lockheed a contract in 1981 for
producing 59 numbers of full size version of XST under the name F117A. The F-117A aircraft first flew in June 1981 from Tonopah
Base and became operational in 19835.In 1988 US Air Force released
a photograph of this aircraft.
According to eye witnesses of XST prototype which could
occasionally be seen from public roads near Tonopah, the aircraft
had bat-like appearance and good manoeuvrability. It had a singleseat cockpit. The canopy had flat radar scattering panels. The wind
shield was V-shaped. The aircraft had a rounded appearance from
all angles. The forward fuselage and wings had the appearance of a
wide inverted V. Also it had folding wings. Its engine consisted of a
modified non-after burning General Electric CJ6 10 turbojet.
9.5.1.1
Constructional details of F-117A
Radar cross section reduction was accomplished by employing
Fibaloy for structural frame parts, for skin panels, spars, ribs and
longerons. Fibaloy, a product of Dow Chemical Co, is produced by
303
304
Introduction to Camouflage & Deception
embedding glass fibres in plastic. It is an excellent radar absorbing
structural material. Another structural material used was reinforced
carbon fibre developed by Air Force Materials Laboratory at Wright
Patterson AFB in Dayton Ohio. This material, besides having good
RAM properties, reduces the infrared signature. It is particularly
useful in high temperature parts such a s outer skin panels near the
engines.
Besides the RAM and RAS employed, the unique shape of F117A is another contributory factor towards RCS reduction. All edges
were rounded. Skins were made of fibaloy. The skin consisted of
multiple layers filled with tiny fibers oriented in a specific alignment,
spacing a n d density for maximum reduction in RCS. The
construction of multiple layers for maximum RCS reduction was
probably the most secret element of stealth technology. Various parts
were made out of super-plastics developed by US Air Force Materials
Laboratory and commercial firms. These are thermoplastics that
are stronger and lighter than steel and titanium, and do not reflect
radar energy.
Another important aspect contributing to the reduction of RCS
of F-1 17A aircraft was its internal structural architecture. A design
known as 'cut-diamond' was reportedly used. It employed several
thousands of flat surfaces, which were so angled that when a radar
beam is incident on them, only a few surfaces reflect the radar energy
in the direction of the radar receiver. All external surfaces and some
of the internal metal parts were coated with ironball RAM. In order
to suppress visual signature, both active and passive camouflage
techniques that change colour to match with the background were
probably employed. Flat-black colour for night and dull grey colour
for day were reported to have been used. An active camouflage
technique, referred to a s "background clutter signal-to-aircraft RCS
matching*, protects the aircraft flying a t low level from look-down
interceptor radars by matching its overall RCS with that of the terrain
below.
ECMIESM equipment were housed in such a way that the use
of antennae on the outside of the airframe, which significantly
contribute to RCS, was dispensed with.
Reduction in IR signature was accomplished by mixing fanbypass air and air from cooling baffles with exhaust gases. This also
helps in reducing acoustic signature. The use of special coatings
and cooling baffles further reduces the IR signature.
Stealth Technology
The noise of the turbofan engines is reduced by surrounding
them with a matrix sandwich of polymers and pyramidic noiseabsorbing structures. It is reported that the aircraft produces a
medium level humming noise a t a distance of 100 feet (30 m) and a
slight whine was heard while taking off.
During night operations, all lights were out. The guidance
systems employed were passive from which no signals could be
detected.
In order to defeat terrain-masking of hostile radar installations,
the F- 117Ausually flies close to the ground below the speed of sound.
This also protects the aircraft from infrared guided weapons or
infrared detector systems. The aircraft is employed for covert
reconnaissance and covert strikes on preselected targets.
The F- l17A stealth fighter is the world's first operational aircraft
designed to employ low observable technolo@. In the Gulf War the
efficacy of F- 1178 was amply demonstrated7. The operation 'Desert
Storm' which began on January 16, 1991, started with a wellcoordinated assault by US AF F-117 stealth fighters7, which were
referred to as 'Shabba' or ghost by America's Saudi allies. The aircraft
flewover one thousand sorties against Iraq's heavily defended targets7.
No stealth fighters were touched by enemy's air defence. In most
cases the F-1 17's destroyed critical facilities using a single bomb.
While F- 117s comprised only 2.5 percent of the Air Force's combat
aircraft in operation 'Desert Storm', they struck 31 percent of the
targets bombed in the first 24 hours of the air campaign7. Stealth
fighters struck the heavily defended targets in down-town Bagdad
with unprecedented accuracy. The Iraqi air defender could not detect
the F- 117. Stealth characteristics meant that fewer aircraft are needed
to complete a mission. Just eight F-117s could do the same job a s a
standard mission of 32 non-stealthy planes dropping unguided bombs
with 16 fighter escorts, eight Wild Weasel defence suppression aircraft,
four radar jammers and 15 tankers for refuelling the aircraft. Thus
Desert Storm has shown the world the value of stealth7.
9.5.2 Northrop/Boeing B-2Advanced Technology Bomber (ATB]
A decision to launch a full scale low observable penetrating
bomber programme was taken by the Carter Administration in 1980.
A contract was placed with Northrop/Boeing for constmction of
prototype preproduction aircraft. The basic design of the aircraft
was flight tested in 1982. A full-scale mockup of the B-2 was made
ready by the end of 1985'.
305
306
Introduction to Camouflage & Deception
The aircraft was powered by four 19,000 lb GE-F 118-GE-100
turbofan engines, was triangular in shape, and had a flying wing
design without vertical tail surfaces5.The exact RCS of B-2 is not
known. Quoted values1 range from 0.01 m2 to millionth of a m2.
The contributory factors towards its low RCS were its internal
structures which were made of titanium coated with epoxy graphite
composites. Its sensor-defeating architecture was accomplished by
computer-aided design techniques. An anechoic filtering structure
involving combinations of plastics, epoxy graphite carbon fibres,
and ceramics contributed towards reducing infrared a s well as radar
signature. Engine heat was absorbed by the use of ultradense carbon
foams. Also active and passive infrared countermeasures were
employed. B-2 first flew in 1989.
Other new stealth airplanes include the US Navy A- 12 'Avenger'
with more advanced stealth characteristics than B-2, and the F-22
Advanced Tactical Fighter (HTF).
9.6
STEALTH WARSHIPS
Attention is also being paid to incorporating stealth features in
major warships8.Stealth in naval environment poses a greater
challenge to designers than stealth of aircraft. Warships are generally
larger than aircraft and exhibit a more complex regimeg . Warships
and combat aircraft have some characteristics which are common
a s they both present hot targets against a fairly uniform
background1'. They however differ in other aspects. Surface ships
have two media - air and water that have very different transmission
characteristics and pose problems such a s radar multipath effects1'.
The advent of highly sensitive radar and IR-guided antiship
missile, besides the new generation of acoustic homing torpedoes
and modern acoustic/magnetic mines, have all put a great
stress on countermeasures demanding reduction in radar cross
section, acoustic and infrared signatures created by ships and
submarines.
Stealth technology for warships involves management of the
various signatures taking into consideration their relative importance
and arriving a t a right balance of signatures. For example, the
reduction of IR radiation usually has an adverse effect on the radar
cross section. The object of signature management is to achieve
optimum combination of various factors starting from design, choice
of shapes, materials, internal and external treatments with appliques
that will give a n overall result a t a n acceptable cost1.
Stealth Technology
The various signatures that are to be considered in a stealth
warship are:
Radar
Infrared
Acoustic
Magnetic
Electric
Hydrodynamic wake
Extra low frequency
Miscellaneous such as contaminants, bioluminescence etc.
Methods for reducing RCS and infrared signature have been
already discussed in the chapters on microwave camouflage and
infrared camouflage. Measures for reduction of RCS include shaping
and profiling of the ship and use of RAM, RAP and RAS. Reduction
of IR signature is accomplished by the use of DRES BALL, and
EDUCTOR DIFFUSER and covering material such as FLETACAMl1.
9.6.1 Acoustic Signature
Surface warships are strong sources of underwater noise which
can be easily detected by passive sonars from very long distances
u p to hundreds of kilometres away. Further, active sonars can detect
ships which reflect incident sound waves. Also, with the help of
underwater noise signature, detection and classification of surface
ships can be done. Propellers and hull are sources of cavitation and
broad-band noise. Generators, diesel engines and various internal
pumps are sources of distinctive sounds a t specific frequencies and
amplitudes that can both aid and hamper detection. The modem
detection methods enable classification of the target specifying the
class of ship .
Progress in sonar sensors and signal processing technology is
bringing down the minimum acceptable noise levels. This in turn
places demand on noise control measures. Minimum noise levels
are accomplished by the design of high performance machinery
isolation systems and methods for reducing cavitation around
propellers and the hull". Noise isolation systems use a wide range
of techniques such a s double elastic mounting systems. In such
applications attention is also to be paid to the secondary transmission
paths. Active control techniques were developed to further enhance
the high degree of isolation which can be accomplished by wellbalanced, passive isolation treatments. In rotating machinery,
moving parts can be dynamically balanced to minimise the noise
30 7
308
Introduction to Camouflage & Deception
from shafts and connections to other machinery". Also, equipment
may be mounted in acoustically insulated boxes in order to isolate
them from the hull.
Propeller noise is another important source which must be taken
care of. It may be divided into two types : i) low frequency noise
generated by the rotation of the blade, where the frequency depends
on the thickness of the blade and the load, and ii) cavitation noise
caused by the implosion of the cavitation bubbles. The latter consists
of a broad band of high frequencies. An air-breathing system fitted
to the propeller blade prevents the onset of cavitation. It exudes
bubbles from holes around the edge of the propeller blade1'. An airbreathing system known a s Masker fitted to the ship's hull also
delays onset of cavitation. But this system aggravates the situation
in the event of a threat from wake-homing torpedoes.
These problems associated with the Masker system have been
overcome by the use of a n alternative screening system. Dowty
Signature Management in the US" made a system employing
decoupling tiles which are bonded to the outer hull around the
machinery area using a contact adhesive. This provides an impedance
mismatch between the ship's hull and the water to resist the passage
of sound between the two.
Coatings are also applied to hulls in the form of decoupling or
damping layers. This is intended to reduce the level of machineryinduced noise radiated into water. Anechoic coatings are designed
to absorb the incident energy generated by active sonar equipment.
Other materials which can be applied include continuous coatings
in which anechoic material is applied to large flat or curved surfaces.
The decoupling tiles and anechoic coatings reduce the detection
range and classification capabilities of the enemy sensors. They also
improve the performance of the ship's own sensors.
9.6.2 Radar Cross Section
As mentioned in the chapter on microwave camouflage, the
basic methods of reducing RCS are the same, with some variations
depending on the nature of the object.
Methods for reduction of RCS include appropriate design
techniques, use of radar absorbing materials, surface coatings etc.
Dowty Signature Management developed a RAM panel known of
FLEXIRAM". This material was used on ships involved in the
operation 'Desert Storm'. The employment of these panels reduced
the ship's RCS making it more difficult for attacking aircraft and
missiles to find and attack the ship. A 30 dB reduction results in
75% reduction in detection range.
Stealth Technology
9.6.3 Infrared Signature
Means for suppressing infrared signature have been already
discussed in the chapter on infrared camouflage. They aim a t
reducing the temperature differences between different areas in a
ship. Another method is to produce specific hot spots, thereby
creating a false target. This diverts the sensor from the real target
to the false image.
A quilt known a s FEECTACAM has been developed in relatively
recent years". This quilt, because of air trapped in it, has low
conductivity, and hence reduces thermal contrast and target
signature. In addition, it reduces RCS.
The FLECTACANI blanket comprises FLECTALON R insulating
fibres knitted between standard camouflage material, liquid repellant,
and is coloured to match with the background. FLECTALON R is
made from strips of 12 micron metallised polyester film which is
stable upto 265°C and which can reflect u p to 95% of radiant heat.
9.6.4 Magnetic Signature
Magnetic signature management has been a subject of study
by naval engineers and scientists since long. Reduction of magnetic
signature is accomplished1' either by magnetically treating the ship
in special facilities - deperming - or by fitting the ship with special
active degaussing coils through which electric current is passed.
The strength of the electric current is controlled from within the
ship in such a way that a t any time and in any geographic position,
the ship's magnetic signature plus that caused by its movement
through the earth's magnetic field is silenced. A combination of
deperming and active degaussing processes is also employed.
Deperming involves putting the ship inside a n arrangement of
coils or placing a n arrangement of coils around the ship and then
passing a powerful electric current through the coils to create a
magnetic field in a drection opposite to that of the magnetic field of
the ship. This cancels the ship's magnetic signature . Alternatively,
depenning is used to create a permanent magnetic field on the ship
which is matched to the area in which it will operate.
Degaussing coils are built into the ship during consfmction to
provide magnetic field correction facilities. The coils are fed with
electric current provided from special computer-controlledgenerators
to create an opposing magnetic field which is continuously matched
to the ship's changing magnetic field as it crosses the ocean.
309
31 0
Introduction to Camouflage & Deception
9.6.5 Electric Signature
Surface ships produce a n extremely low frequency electric
signature (ELFE) t h a t can trigger mines or be detected by
comparatively simple and inexpensive surveillance devices. The
signature results when electric currents - which may result from the
electrochemical reaction between the steel hull and the bronze
propeller or from an active cathodic protection system - return to the
hull through the shaft. The widely varying impedances of the shaft
bearings and seals, as a function of shaft angle, cause a modulation
of this return current which generates the ELFE wave lo.
Davis Engineering has developed an Active Shaft Grounding
(ASG)system that uses a n electronic transconductance amplifier in
a closed loop arrangement to maintain the propeller shaft below 1
mV, thereby minimising the ELFE signatures.
9.6.6 Other Signatures
There are other types of signatures associated with a ship by
which it may be detected. One of the most common for which
probably nothing can be done is the pressure signature". Another
signature known as hydrodynamic wake can be detected u p to 40
krn behind the ship by remote sensing techniques. Synthetic Aperture
Radar (SAR)on aircraft and satellites can provide sufficient evidence
of presence of ships. The proper interpretation of such data can
lead to actual ship identification. Proper hull design, decreased draft,
contra-rotating propellers and non-conventional propeller systems
like pump jet can reduce hydrodynamic wake.
Chemical traces left in the discharges from cooling water or
engine exhausts, bioluminescence caused by the disturbance of
minute organisms, hydrodynamic pressure, and surface wave
patterns can now be detected by satellites.
9.7
STEALTH TANK
The success of stealth technology in the Gulf War provided
impetus to the Department of Defence and US combat vehicle makers
to make future battle tanks far less visible to the enemy radars and
other sensors. Composite armour, exhaust reduction measures,
sensor jamming equipment and deception are some of the new
technologies, US companies were contemplating to "give fighting
vehicles the signature of a light bulb" a s one top industry executive
said. Under pressure from US Congress, the US Army combat vehicle
makers and Pentagon's Defence Advanced Research Projects Agency
(DARPA)have been secretly working towards a stealth tank since
the mid-1980s12.
Stealth Technology
For decades, the tank designers have been increasing the
thickness of the armour plates. A s the armour weight increases, the
demand for more powerful engines increases. More powerful engines
give rise to stronger heat and acoustic signatures. So there is a
need to find improved methods of reducing all these signatures12.
It is said that the use of composite materials provides greater
protection and gives vehicles a low signature. Composites can be
formed into any desired shape. A composite surface does not reflect
like a metal.
9.8
STEALTH SUBMARINE
Detection of submarines is based on the noise generated by
the various sources of noise including the hydrodynamic noise which
is due to the water passing around the hull, the noise of the
movement of propellers, gears, pumps and other machinery, noise
produced by cavitation etc4.
Efforts were directed towards refinements in mounting of
machinery, and employing smaller parts in order to reduce noise.
Further, with the advent of nuclear power, the hull has undergone
changes in its design which has resulted in the reduction of
hydrodynamic flow noise. Attention is now being paid towards using
new materials for reducing weight and detectability and using active
submarine stealth measures such a s acoustic jamming, interference
and deception.
9.9
STEALTH HELICOPTER
Helicopters possessing stealth characteristics have been under
development by US. These include Phalanx Dragon being designed
by Phalanx Organisation Inc based in Long Beach California, and
Bell/McDonnell Douglas LHX having low infrared and acoustic
signatures and a low - RCS fuselage made of RAM1.
McDonnell Douglas MH-6 is an operational stealth helicopter.
American forces used the MH-6 during the invasion of Grenada in
1980. Its stealth features include modifications to the engine and
main rotor to suppress infrared and acoustic signatures. It is
reportedly one of the quietest helicopters in the world, capable of
hovering a few hundred feet from a person without being heard.
STEALTH RPVS
Much stealth research has been carried out on unmanned
aircraft. U S has extensively used stealth technology on remotely
piloted vehicles, some of which are operational and many under
development1.
9.10
31 1
312
Introduction to Camouflage & Deception
The Aquila of US Army built by Lockheed can perform a variety
of missions in a hostile environment and survive. The main factor
responsible for its survivability is its use of stealth technology. The
aircraft has practically no visual, acoustic, infrared and radar
signatures. It is of small size and the airframe is made of Kevlar. Its
RCS is so low that, during tests, it could be tracked only when
metal was added. It is shaped like a flying wing with a forward
fuselage that is curved.
Other stealth unmanned aircraft of US include US Army CM30, US Army CM-44 Boeing/DARPA Teal Cameo and Leading
Systems and Amber which were under development.
9.11 STEALTH MISSILES
Like an aircraft, a missile also should have the capability of
remaining undetected. US has several stealth missiles both in
operation and under development l .
The AGM-86b is one such missile which is in operation. It is
very small in size and made of metal alloys and radar transparent
materials. It has practically negligible infrared signature. Its fuselage
and nose design are such that their contribution to RCS is low. It
can fly a t low levels so that its chance of detection is minimum.
Another such missile is BGM/AGM- 109 Tomahawk cruise missile.
It can be launched from aircraft, ships, submarines and groundbased 1aunchers.The stealth missiles under development are DARPA
PROJECT LORAINE, Lockheed cruise missiles and Northrop AGM136 Tacit Rainbow.
9.12 AIRSHIP
Airship is a new concept to counter threats to ships a t sea by
the cruise missiles which fly very low, virtually intermingled with
radar clutter1. These airships can look down and instantly detect
and counter an incoming cruise missile. The airship incorporates
the latest in the design of the engine, airborne electronics and search
radar technology. Although reducing the airship's radar, infrared
and acoustic signatures may not be a problem, making it blend
with the ever changing background of sea, sky and clouds will pose
difficulties.
REFERENCES
1. Jones, J. Stealth technology the art of black magic (Ed). Matt
Thurber AERO, A Division of TAB Books Inc., Blue Ridge
summit, PA 17214, 1989.
Stealth Technology
Cott, H.B. Adaptive coloration in animals. Methuen & Co Ltd,
London, 1966.
Schmieder, D.E. & Walker G.W. Camouflage, suppression and
screening systems. In countermeasure systems, (Vol 7). The
Infrared and Electro-optical Systems Hand Book (Ed). Pollock,
D.H, Copublished by Environmental Research Institute,
Michigan and SPIE Optical Engineering Press, Washington,
1993.
Goldberg, J.H. Stealth a n d counterstealth technology.
International Military and Defence Encyclopedia, (5)Col. Trevor
N. Dupuy, USA(Retd.) Ed.-in-chief, Brassey's (US), Inc.
Washington, New York, pp 2544-255 1, 1993.
Stonier, R.A. Stealth aircraft and technology. World War I1 to
the Gulf - Part 11. Applications and Design, SAMPE Journal.
1991, 2 7 (5) .
Stealth technology of the future .... which is Now, VAW, V
1991.
United States Air Force in Operation Desert Storm, VAYU, V
1991.
Foxwell, D, Stealth the essence of modern frigate design.
International Defence Review, 1990.9 p. 984-94.
Linder, B.R, (US Navy), US Naval Institute Proceedings. 1993,
119/7/ 1, p. 85-88.
Hewish, M. Stealth at sea signature management enhances
attack and defence. International Defence Review, 1994, 27,
45-49.
Brown D.K. & Tupper, E.C. The naval architecture of surface
warships royal instituition of naval architects paper 1988,
Signature Management, Navy International, 199 1, 96(5),
152-58.
Baker, C. & Polsky, D. Gulf success prods effects to develop
stealth tank. Defence News, May 1991,16.
31 3
CHAPTER 18
R&D WORK ON CAMOUFLAGE AND
DECEPTION IN DRDO
10.1
INTRODUCTION
Indian armed forces are deployed in a variety of trying
environments ranging from the hot and dry heat of Rajasthan desert
to the rain-lashed tropics of the northeast, from the sub-zero
conditions of the Himalayan heights in the north to the hot humid
archipelago of Andaman and Car Nicobar, a s well a s in special
situations such a s in submarines, space missions and Antarctic
expeditions. They operate a bewildering variety of military hardwareweapon platforms, weapons, weapon delivery systems, command,
control and communications systems. It is therefore apparent that
continuous indigenous R&D in camouflage and countermeasures is
vital for survival and success, particularly in view of the fact that
the entire subject is shrouded in secrecy, and no country would be
willing to pass on know-how nor would material in open literatuxe
be of great relevance, unless adapted to specific situations.
In view of the above considerations, the Defence Research and
Development Organisation (DRDO)has been giving special emphasis
in recent years to research and development in the field of camouflage
and deception. The laboratories which are mainly involved in this
activity are; Defence Materials Stores Research and Development
Establishment (DMSRDE), Kanpur; Defence Laboratory, Jodhpur
(DW); Naval Materials Research Laboratory (NMRL) Mumbai; and
Naval Physical and Oceanographic Laboratory (NPOL),Kochi.
10.2 VISUAL CAMOUFLAGE
DMSRDE has been working on the development of camouflage
paints and synthetic nets. The laboratory has developed paints and
pre-garnished light weight synthetic camouflage nets for visible and
NIR regions, conforming to colour schemes/patterns suitable for
green belt areas, desert terrains and coastal areas. It has also
31 6
Introduction to Camouflage & Deception
developed polystyrene emulsions, polystyyene solvents and silicatebased camouflage paints for effectively camouflaging runways and
taxi tracks.
DW has been canying out basic, applied and development work
in the field to cater to the visible a n d other regions of t$e
electromagnetic spectrum. The laboratory has generated computeraided disruptive patterns of different types with different colour
schemes suitable for various geographical regions. It has achieved
significant results in the development of camouflage by arboriculture.
DW is also engaged in studies on psychological aspects of visual
camouflage and development of suitable devices and equipment for
effective camouflage in the visible region.
10.3 INFRARED CAMOUFLAGE
DMSRDE has developed paints in various shades, e.g. olive
green, deep brunswick green, light green biege, and dark brown,
having suitable NIR reflectance values. The paints are solvent-based,
impart matt finish and have outdoor life of 1.5 to 2 years. These can
be applied over mild steel, tarpaulins, PVC sheets, wooden structures,
rubber sheets and cement walls. These paints are effective for both
NIR and visible regions. The laboratory has an ongoing programme
on the development of thermal camouflage materials.
DW has been pursuing work on infrared camouflage mainly to
study (i) thermal signatures of various objects, (ii) suppression of
thermal signatures by thermal insulation and paints, (iii)simulation
of thermal signatures, and (iv) development of methods of imaging
thermal objects.
10.4 MICROWAVE CAMOUFLAGE
DMSRDE has obtained encouraging results in the development
of light weight microwave absorbers using Retinyl Schiff base salts.
These were synthesised in the laboratory and characterised by IR
spectroscopy and elemental analysis. Absorber samples of finite
thickness were prepared and tested for radar absorption at X-band
frequencies.
The laboratory has also conducted studies on Epoxy/SiC,
silicone rubberlcarbon and epoxy/carbonyl iron systems for
reflection/transmission characteristics and dielectric properties at
X-band frequencies. These materials can be applied on static targets
for RCS reduction. It has also developed a camouflage net which
caters for visible, NIR and radar bands. The net is a synthetic, pregarnished camouflage system which consists of a well-designed
garnish structure developed from PVC-coated nylon fabric.
R & D work in camouflage and deception, in DRDO
DW has been carrying out work on theoretical designing of
broadband electrical RAM coatings using multilayers.
10.5 MULTISPECTRAL CAMOUFLAGE MATERIALS
DMSRDE and DW have been carrying out R&D on development
of multi-spectral camouflage materials. DW has synthesised a large
number of materials such as conducting polymers, liquid crystals,
liquid foam and materials for anti-reflective coatings. DMSRDE has
initiated a programme for developing a multi-spectral camouflage
system which should be able to cater for visible, NIR, thermal IR
and centimeter and millimeter wave radar regions.
10.6 NAVAL CAMOUFLAGE
NPOL and NMRL have been carrying out R&D leading to naval
camouflage, to cater for a variety of signatures, the chief of which is
the acoustic signatures of naval objects.
NMRL has been working on viscoelastic materials including
polyurethanes which produce reduction of acoustic energy
transmission and hence reduced possibilities of detection. The
laboratory has also been working on shaping of naval platforms for
RCS reduction. In addition, NMRL is working on the development of
RAM sheathing and paints based on dielectric absorbing materials.
It has also been working on the development of composite-based
RAMS. The laboratory, in collaboration with NPL and NPOL, is trying
to develop more effective underwater sensing (passive)materids using
PZT polymer composites.
10.7 FORCE MULTIPLIERS
DW has made considerable progress in the development of
deception equipment for employing a s force multipliers for tactical
advantage.
31 7
CHAPTER 11
CONCLUSION
The technological explosion of the 20th century has made a
tremendous impact on military hardware - weapon platforms,
weapons, weapon delivery systems, mobility, command, control and
communications, reconnaissance, surveillance and target acquisition
systems, and countermeasures. In consequence, wars have become
highly technologically oriented a n d sophisticated. These
developments are not merely confined to the principal theatres of
war - the land, the air and the sea - but are also entering space
through military satellites1.
Rapid strides in the fields of electronics, computer science and
engineering and material science have brought in unimaginable
improvements in military sensor technology. These developments
have greatly enhanced the capabilities of reconnaissance,
surveillance and target acquisition systems employed in the various
theatres of war1.
Radar technology has seen tremendous advances since World
War I1 in terms of range, resolution, detection, tracking, and ability
to engage targets. A s these developments continue, it will be possible
to employ multimode, multi-frequency and multipolarisation radars,
besides solid state transmitters/receivers which can be mounted
on aircraft's skin. All these developments pose great threat to major
targets.
Infrared sensing systems also have progressed significantly.
The FLIR can give images of targets day and night, though a t short
range. Although IR systems are not a s powerFul and a s reliable a s
radars, they cannot be detected, as they are passive. IR guided
missiles which use IRST have a range u p to 160 km. They are used
a s widely as radar-based systems. IRST systems will probably play
a greater role in future wars with the developments that are taking
place in the medium and long wave IR monolithic focal plane arrays,
which enhance sensitivity and resolution.The use of IR thermal
320
Introduction to Camouflage & Deception
imaging systems will further increase with developments in
pyroelectric detectors.
In the technology of electro-optical systems, rapid advancements
are taking place. Laser systems for target ranging and designation
are being widely used.
Now, with the advent of multiple sensor fusion and correlation,
together with the use of Signature Intercept Sensors (SIGINT)and
Communications Intercept Reports (COMINT), detection,
classification and tracking become easier and information can be
obtained in real time. Such a multiple sensor system will have the
ability to detect a variety of targets - stationary, moving, emitting
and communicating. Multiple sensor systems can have the ability
to detect targets which are hidden. The multiple sensors cover a
wide range of the electromagnetic spectrum and are complementary
to each other. Besides the threat posed by these sensors individually
and collectively, new areas such as pattern recognition, artificial
intelligence, automatic target recognition and neural network
applications are advancing very fast. These advances further enhance
the capabilities of target acquisition systems2-'.
The developments required for countermeasures are to be
viewed in this scenario.
Stealth or low observable technology which has come u p is
trying to face these challenges. Although primarily the technology
is intended to defy detection of fighter aircraft and bombers by radar,
it has to counter detection by visible, near IR, thermal infrared,
acoustic, electrical, magnetic, seismic signals etc depending upon
the actual situation.
Conventional methods of camouflage and deception cater for
only the preliminary stages of the stealth technology. Starting from
the design stage of the military object, stealth technology has to
take into consideration all aspects - shape, structure, surface
materials and surface appliques - to reduce all possible signatures
to levels from which they cannot be detecteda.
The efficacy of s t e a l t h technology of F-117 aircraft
and B-2 bomber was amply demonstrated in the Gulf W a r in 1991.
Stealth technology will in future probably be extended to many
other military objects depending upon developments in sensor
systems such as millimeter wave radars. Besides stealth, deception
equipment in the form of chaff decoys and IF? flares are being
employed to divert the attention of the weapon from its trajectory.
Conclusion
However, today, there appears to be systems which can distinguish
between a decoy and real object. A s stealth technology advances
further, it is imperative that technologies to counter stealth should
also be developed. These developments involve more powerful and
versatile sensors. In turn, these countermeasures to stealth may
spur research work on second generation of stealth, which may
probably employ active measures, unlike the passive measures such
a s shaping, masking etc of the first generation. The new stealth
technology may create false signatures to confuse the sensors.
Further, the weapon platforms, weapons and weapon delivery
systems may have characteristics which may change depending upon
the requirements. These variations in the characteristics may make
the task of the sensors difficultg.
On the whole, the field of camouflage and deception, or in its
modern terminology, 'countermeasures7or 'low observables', has to
face greater challenges in future. It demands a judicious combination
of research in a variety of basic sciences, their application to specific
situations, development of newer materials to cater to a wide variety
of exacting specifications, innovative design techniques, and costeffective production technologies. It is a never-ending battle of wits
between advances in sensor technology a n d corresponding
countermeasures.
REFERENCES
1.
Friedman, S. & Miller, Gunston, P; Richardson, Doug Hobbs
D. Warmer M.; Advanced technology warfare. Salmander Book,
Published by Salmander Books Ltd., London, 1985.
2.
Lupo J.C. Defence applications of neural networks, IEEE
Communications Magazine, Nov 1990.
3.
Geisenheyner, S. Special report: possible applications of
neuorocomputing in defence. Annada International, 1990,l.
4.
Boyle, D., AI-Computer may starting to Think. International
Defence Review, 1990,2.
5.
Roth, M .W. Survey of neural network technology for automatic
target recognition. IEEE Transactions on Neural Network March
1990, 1.
6.
Boyle, D. Fusing the data in the search of identity. International
Defence Review, 1989,8.
321
322
Introduction to Camouflage & Deception
7.
Moore, R. Sensor technology. International Military and Defence
Encyclopdia, N. Dupuy T.N., (Ed.-in-chief), 5 , Brassey's (US),
Inc. Washington(l993).pp. 2393.
8.
JO&S, J . Stealth technology-The art of black magic, (Ed).Matt
Thurber. AERO, A Division of TAB Books Inc., Blue Ridge
summit PA 17214,1989.
9.
Goldberg, J.H. Stealth technology and counterstealth
technology. International Military and Defence Encyclopedia,
Dupuy T.N., (Ed.-in-chief),4 , Brassey's (US) Inc. Washington,
New York, 1993. pp. 1953.
A. 1
Grassman's Laws
Colour coordinates are arrived a t according to a well-defined
experimental procedure which is based upon Grassman's laws. Of
the three laws, the two which are of relevance in the present context
are a s follows:
(i) A colour can be matched by a mixture of three selected
radiations;
(ii) If two colours are matched in turn by mixtures of three
radiations, the two colours, when mixed by suitable means,
will be matched by the sum of the two mixtures.
A.2
Trichromatic Colorimetry
In trichromatic colorimetry, saturated red, green and blue
radiations are mixed additively, in appropriate proportions. White
colour is matched by a correct mixture of red, green and blue.
Intermediate hues can be obtained by combining these three stimuli
in appropriate proportions. Law 1 stated above can be verified
experimentally with a trichromatic colorimeter.
Mathematical additivity of Law 2 stated above may be expressed
a s follows :
Let (C,) and (C2)be two colours which are to be matched. The
colorimeter indicates the amounts of the stimuli (R),(G),and (B)in
some arbitrary linear scale. Let u, v and w represent the amounts of
the stimuli (R), (G) and (B).
Algebraically the two colours (C,) and (C2)may be represented
as
A- B
C I (C,) = u1 (R) + v1 (GI + wl (B)
where cl and c2 are the amounts of (C1)and (C2)expressed in
arbitrary scale.
If the two colours (C1)and (C2)are mixed together .and the
mixture is matched on the colorimeter, we would have
8-3
cl (Cl) + c2 (C2) = U3 (R) + V3 (GI + W3 (B)
If the additivity law of Grassman's holds good, ther,
324
Introduction to Camouflage & Deception
The work of Ives (1975), Guild (1931) Wright (1928), Stiles
(19551, and CIE (Commission Internationale de 17Eclairage,1931,
1964)put the foundation of the science and the technique of colour
measurement on a firm basis.
Trichomatic Equation and Chromaticity Coordinates
A colour is matched in a trichomatic colorimeter as follows.
A-7
q (C) E u (R) + v (G) + w (B)
where u, v, w are the amounts of (R), (G), and (B) in some
arbitrary scales of the instrument and q is a measure of the colour
(C).The above equation is not an algebraic equation but a colour
matching equation.
The units of (R), (G)and (B) are defined on the basis of a match
on a standard white. On this basis, any colour can be measured
quantitatively in terms of red, green and blue stimuli.
The colour equation for may be written a s
A- 8
C (C) = R (R) + G (G) + B (B)
where R, G and B are called tristimulus values which are
numerical quantities. The equation is referred tg as trichomatic
equation. Now we write
C=R+G+B
A-9
which is an algebraic equation.
In order to separate the quantity of (C) from its colour quality,
the trichromatic equation is divided on both sides by C. Then the
equation reduces to
A- 10
1.0 (C) ,r ,(R)+ g ,(G)+ b ,(B)
where
r = R / R+G+B, g = G / R+G+B, b=B / R+G+B
andr+g+b = l
Here, r,g and b are called the chromaticity coordinates of C. A s
r + g + b = 1, C is dependent only on two independent coordinates.
Therefore, C may be represented graphically on a two dimensional
diagram known a s the chromaticity diagram or chromaticity chart.
In the chromaticity diagram, r is taken on the X axis, and g on
the Y axis, and the colour C is located on the diagram by its
coordinates (r,g),and the third coordinate b
b=1-(r+g)
A-11
A.3
.On this diagram, the coordinates of matching stimuli (R) (G)
and (B) are (1.O, 0.0), (0.0, 1.O) and (0.0, 0.0) respectively.
A.4
Colour Coordinates from Spectral Composition
Let r; g;, bAbe the spectral tristimulus values or the distribution
coefficients which would match each wavelength in terms of the
instrument stimuli (R), (G) and (B). Ex is the spectral energy
distribution of C, then the tristimulus values needed to match C
can be arrived a t as follows:
m
B=~E,~,cu
0
The CIE (ROB)System of Colour Measurement
The C.1.E in 1931 introduced the standardisation of the values
of 6 , Sr and 5 in terms of a C.I.E.standard observer. This was
done by identifying the matching stimuli (R), (G) and (B) with the
monochromatic wavelength - 700 nm (R), 546.1 nm (G) and 435.8
nm (B)respectively.
- n I 3st of 1 e applications, the integrals given under equations
A- 12, A- 13 and A- 14 may be replaced by discrete summation
k5
*
The uncertainties associated with visual colorimetry were
removed by the specification of the CIE standard observer. By the
use of tabulated tristhulus values of
and q,the chromaticity
coordinates of the stimulus in the C.I.E. (RGB) system can be
straightaway calculated. This provides the physical basis of
colorimetry. The only physical measurement involved in this
technique is the determination of E va- les w'5 the help of a
spectroradiometer.
c,
326
Introduction to Camouflage& Deception
A.6
The CIE (XYZ) System
The CIE [RGB]system has one major drawback. As the matching
stimuli [R], [GI [B] are monochromatic spectral colours, the
trichromatic equations for other spectral radiations involve negative
quantities. The negative signs occur not only in the spectral
tristimulus values but also in the chromaticity coordinates. As such,
it was thought advisable to avoid these negative quantities in the
specifications of colours.
Therefore CIE in 1931 recommended the adoption of an allpositive system a s the standard reference system for colour
specification. Thus the CIE adopted a system of non-physical
and [Z] in the [RGB] system in such a way
reference stimuli [XI
that all real physical stimuli could be expressed entirely in terms of
positive stimulus values and chromaticity coordinates. As the
(Y) and (2)are known, i.e. [XI, M
chromaticity coordinates of (X),
and [Z],in the [RGB] system, the spectral tristimulus values r:, , 9; ,
[v
and 5; for the equal-energy spectra may be transformed to the
corresponding values in the CIE (XYZ) system. The spectral
tristimulus values in the CIE (XYZ)are usually denoted by 4, &, 6 .
The so called chromaticity coordinates x y z of the spectral colours
may be calculated as
The chromaticity coordinates of any other colour in terms of
its spectral composition E may be computed in a direct manner as
IE,Z.&
O
Z=
'
-
0
and x = X/X+Y+Z,....etc
B.1
Radar Equation
The equation relating the transmitted power, received power
and the distance to the target known as the radar (range)equation
can be derived as follows:
Let P,be the power transmitted (peak)by the radar transmitting
antenna, assumed to be isotropic. The power density (PD) at a
distance R from the transmitter is given by
Normally, the antenna will be directive. If the power of the
antenna along the direction of the target is G, the power density at
the target (power per unit area) is given by
The transmitted signal which is received by the target undergoes
reflection at the target and comes back to the transmitter as an
echo. The power density of the signal back at the radar is given by
where a is known as the radar cross section (RCS)of the target.
The echo is picked up by the radar's antenna. The power
received by the radar is given by
where A, is the effective receiving antenna area.
The radar equation in its simplest form is given by
Solving for R,
328
Introduction to Camouflage & Deception
The maximum range of the radar k
, corresponds to the value
of R at the minimum detectable (received)power so that
where
Smhis the minimum detectable received signal. From the above
equation we can get expressions for various other characteristics.
can also be shown a s equal to
where his the wavelength of the radar electromagnetic energy
related by
In order to double the range the power of the transmitter has
to be raised 16 times. As the size of the antenna is increased the
transmitted power is concentrated to a narrow beam and
simultaneously there will be a larger capture area and there will be
increase in the range.
A
Absorption 211,213,219
materials 252
solar 283
Adaptation 43
Advanced technology warfare
2-1
Advertisement 33
Aerial
observation
photographs 1, 2
Air
defence systems 9
warfare 12
Antireflective coatings 284
Antishine devices 88
Antisubmarine warfare 1 3
Animal colouration 21
Arboriculture 63
Armoured personnel camer
22
Armour piercing fin stabilised
discarding sabot projectile 8
Artificial intelligence 8
Artillery 9
B
auditory 35
chromogenic materials
291
evaluation 91
infrared 100
radiation 101
visual 35,41
psychological 84
reflectance 88
screens 163
Coating materials 274,278
antireflective 283
composites 289
surface 289
Colour, colouration 45
disruptive 25
matching 18,68
measurement 46
resemblances 19
warning 33
Concealment 18,22
colouration 30,32
cryptic 30
offence 31
Contour obliteration 71
Contrast 47
temperature effects 114
Countershading 21-24,69
Blending 68
Brightness 47
C
Camera 55
Camouflage 1, 18,30
acoustic 290
Deception 3,73,229
background 241
equipment 233-237
psychological aspects
232
330 Introduction to Carnoufloge & Deception
Decoys 235
chaff 242
IR & radar 242
tactical (TALD) 246
Dielectric materials 257
artificial 258
Disguise 34
Disinforrnation 23 1
Disruptive
colouration 70
conlast 27
pattern 28
Diverting attention 34
Dual texture gradient 76
Dummies 234
Eductor diffuser 155
Electronic warfare 15
Elimination of shadow 72
Evaluation, see camouflage
Ferrites 254
Fiballoy 303
Foams 88
aqueous284
structure 286
Flares 244
Generation of disruptive
patterns 77
Globar 102
Graded absorbers 257
Gyromagnetic ratio 255
Heterocyclics 259
Hexachloroethane 287
Infrared sensors 1 16
camouflage materials
267
sensing systems 1 18
photography 128
signatures 140
suppression 151
attenuation 267
telescopes 126
Instruments 48
Image intensifiers 49, 133
amplification 50
rangefinding 51
Irradiance 103
Jungle area pigments
see pigments
Kevlar 293
Kirchofls law 105
Laser 15
Loss tangent 253,261
Luminescent materials 292
Metamers 91
Microwaves 170
generation 173
devices 174
sensors 176
camouflaging 73
Mimicry 35
Multispectral camouflage 288
Navalwasfare '12
Nets 78,288
manufacturers 83
properties 79
Nernst glower 102
Noise equivalent power 125
Nuclear propulsion 13
Object resemblance 34
Obscuration 268
Obscurants 66
Optical
detector 130
principles 71
texture 47
Paints 279
Passive countermeasures 160
Pattern painting 73
Phased array radar 175
Platforms 52
Photography 52
Photo-reconnaissance 53
factors 54
Pigments 275,281
jungle area 282
desert 283
ocean 283
Planck's law 106
Plantation 64
Plume signature, see
suppression
Polymers,
conducting 259
chiral & two dimensional 262, 264
materials 293
RCS I98
aircraft 203
flat plate 200
reduction 2I0
ship 203
tank 207
Radar 3, 186
absorption 2 13
materials 252
air defence 194
cross-section 170, 195
method of prediction 199
frequencies 172
instrumen tation 209
measurements 2 10
tracking 187-191
weapon locating 194
Radiance 103
Radiant
absorbtence 104
emnittance 103
Intensity 103
photon emittance 103
reflectance 103
Rainfall zone 63
Reactive countermeasures 161
SateUtes 60
Scanners 59
Screens 64
dallanbach 2 18
jaurnann 2.18
magnetic 219
mcmillan 217
salisbury 2 15
screens 67
Signature
electric 310
332
Introduction to camouflage 86 Deception
infrared 309
magnetic 309
Smoke 287
Sensors 48, 59
Spectral reflectivity 277
Stefan-Boltzmann law 105
Stealth 300-308
aircraft 302
airship 312
helicopter 31 1
missiles 312
submarine 31 1
tank 310
warships 306
Submarine 13
Suppression
hot parts 158
plume signature, 157
shadow 30
tank 159
Surveillance 234,239
Target characteristics 85
Target aquisition systems 10
illumination 52
Tarps 164
Thermal imagers 132
Tracking 52
Transferred electronic devices
175
Tungsten l.amp 101
Ultraviolet region 170
Urethane linkage 85
Vaporization of fuel 84
Vidicon 127
Visible region 60
Visual perception 84
Visually evoked potential 87
Vulnerability
acoustic 241
laser detectiog 240
radar detection 240
Wake 14
Warfare
biological 10
chemical 10
nuclear 10
Waveguides 170,173
X-ray 101
Xenon 110
Xenon arc lamp 101
ISBN: 81-86514-02-7
Defena Scknti& Information& IkumenFaaiwr
Defence RweaKh & Dsrrelopment OqpksPlom
Mintsty of Defence
Metcalfe H-,
Oelhi I I0 054
-
Ida
-
I