Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Hooke's law wikipedia , lookup
Jerk (physics) wikipedia , lookup
Center of mass wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Optical heterodyne detection wikipedia , lookup
Brownian motion wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Work (physics) wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Hunting oscillation wikipedia , lookup
Classical central-force problem wikipedia , lookup
Equations of motion wikipedia , lookup
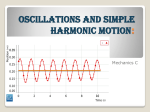
Oscillations and Periodic Motion 24 June 2002 Dr. Gary Grim Overview • Observations & Definitions • Simple Harmonic Motion (SHM) • SHM Systems – Mass & Spring – Pendulum Systems • Damped & Forced Oscillations Observations & Definitions • Equilibrium – Natural position of rest when oscillations are not present. • Restoring force – A force which always acts to return the system to its equilibrium position. • Amplitude – Maximum displacement from equilibrium. • Cycle – One complete oscillation, i.e., a cycle is complete when the position and velocity return to their initial values. Observations & Definitions • Period – Time to complete one cycle. (Inverse of frequency.) • Frequency – Number of cycles per unit time. (Inverse of period.) • Hertz – Unit of frequency: 1 Hz = 1 cycle/second. Uniform Circular Motion y Initial conditions X Displacement: Y Displacement: Speed = R cos(φ ) R sin(φ ) vo Projection onto X Axis Amplitude = R Period: 2πR T = vo Angular velocity? 2π 2π vo ω≡ = 2πf = = 2πR R T vo yo vo R φ xo x Uniform Circular Motion y X & Y Motion x (t ) = R cos(ωt + φ ) y (t ) = R cos(ω t + φ ) yo vo R φ xo x Observations & Definitions • Angular Frequency (Velocity) – Number of radians per unit time. • Relationship to cycle frequency. ω = 2πf Simple Harmonic Motion • SHM occurs when the restoring force is proportional to the displacement. • Ideal Spring (SHM Prototype) – Hookes Law F = −kx 2 d x m 2 = −kx dt Simple Harmonic Motion • SHM Equation of Motion: 2 d x m 2 + kx = 0 dt • Solution: x (t ) = A cos( ωt + φ ) k ω = m 2 Simple Harmonic Motion • Phase Angle: ωt + φ • Frequency: ω 1 f = = 2π 2π • Period: 1 m T = = 2π f k k m Simple Harmonic Motion • Initial Position: xo = A cos(φ ) • Initial Velocity: vo = −ωA sin(φ ) • Initial Phase: − vo φ = arctan( ) ωxo 2 • Initial Amplitude: A = xo 2 + vo ω2 Simple Harmonic Motion • Total Energy (T+U) : 1 2 1 2 E = mv + kx 2 2 1 2 = kA 2 SHM Systems • 1-D Systems – Mass & Spring Horizontal – Mass & Spring Vertical • Same as horizontal, but with equilibrium point shifted by gravity, such that: k∆x = mg – Pendulum Systems • Simple • Physical • Torsional Example: P13-10 • A 2.00 kg frictionless block is attached to an ideal spring with force constant 300 N/m. At t=0, the spring is neither stretched nor compressed and the block is moving in the negative direction at 12.0 m/s. Find: – – – a) Amplitude b) Phase c) Write the equation for the position as a function of time. 300 N k m = 12.2rad / s ω= = m 2.00 Kg 2 2 a) A = xo 2 + vo = 02 + 12 = 0.98m 2 2 ω b) φ = arctan( 12. 2 − vo 12 π ) = arctan( − ) = arctan( ∞) = ± ω xo 12 .2 * 0 2 v o = −ωA sin(φ ) ⇒ φ > 0, c) π x(t ) = 0. 98cos(12.2t + ) 2 φ= π 2 The Simple Pendulum • Point mass suspended by a massless, inextensible cable. F = − mg sin θ x F ≈ − mgθ = − mg = kx L k g ω= = m L The Physical Pendulum • A finite sized body, oscillating about a frictionless, fixed point, within the body. τ = −mgd sin θ ≈ −mgd θ d 2θ − mgdθ = Iα = I 2 dt mgd ω= I The Torsional Pendulum • Rotating mass with torque proportional to angular displacement, e.g. a watch spring. Iα = −κθ d 2θ κ =− θ 2 dt I κ ω= I θ = Θ cos(ω t + φ ) Example P13-38 • We want to support a thin hoop by a horizontal nail and have the hoop make one complete small-angle oscillation every 2.0s What must the hoop radius be? A physical pendulum problem which means the angular frequency is given by: ω= mgd , I where, the moment of inertia is taken about the edge of the ring, and the distance from the pivot to the cg, is the radius R. From the parallel axis theorem, the moment of inertia of the hoop about the nail I = MR2 + MR2 = 2MR2, so 2π mgR = ⇒ 2 T 2MR 2 2 1 T 1 2 .0 R= g= 9.8 = 0 .497 m 2 2π 2 6.28 Damped Oscillations • SHM: d 2x m 2 + kx = 0 dt 2 • Add velocity term: d x dx m 2 + b + kx = 0 dt dt • Solution: x (t ) = Ae ω' = − bt 2 m cos(ω ' t + φ ) k b − m 2m 2 Damped Oscillations • Underdamped: b < 2 km • Critically Damped: b = 2 km • Overdamped: b > 2 km Oscillation Curves: 2.5 2 1.5 Displacment (m) 1 0.5 0 0 0.5 1 1.5 2 2.5 -0.5 -1 -1.5 Undamped -2 Underdamped Envelope -2.5 Time (s) Critically Dampled Overdamped 3 Forced Oscillations & Resonance • Unforced oscillations occur at the natural frequency of the oscillator • Forced oscillations have the period of the driving force. F (t ) = F cos(ω t ) max d • Amplitude of Forced Oscillations: Fmax A= 2 2 2 2 (k − mω d ) + b ω d Forced Oscillations & Resonance • Resonance: k − mω d = 0, 2 k ωd = m