Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Electronic engineering wikipedia , lookup
Negative feedback wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
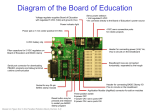
Television standards conversion wikipedia , lookup
Distributed control system wikipedia , lookup
Hendrik Wade Bode wikipedia , lookup
Fire-control system wikipedia , lookup
Control theory wikipedia , lookup
Public address system wikipedia , lookup
MOTION CONTROL/SERVO SYSTEMS A MOTION CONTROL SYSTEM IS SPECIFICALLY DESIGNED TO CONTROL THE MOTIONS OF MACHINES 1 MOTION CONTROL/SERVO SYSTEMS THE PURPOSE OF MOTION CONTROL ON A MACHINE IS OFTEN TO SYCHRONIZE TWO OR MORE RELATED FUNCTIONS 2 MOTION CONTROL/SERVO SYSTEMS MOTION CONTROL HARDWARE CAN CONSIST OF MOTORS, AMPLIFIERS, AND DRIVE SYSTEMS 3 MOTION CONTROL/SERVO SYSTEMS MOTION CONTROL HARDWARE USES COMPUTER AND/ OR PLC, PROGRAMMABLE LOGIC CONTROLLERS, TO RUN ALORITHMS 4 MOTION CONTROL/SERVO SYSTEMS PMC, PROGRAMMABLE MOTOR CONTROL IS DEFINED AS THE APPLICATION OF PROGRAMMABLE HARDWARE AND SOFTWARE TO CONTROL LINEAR AND ROTARY MOTIONS 5 MOTION CONTROL/SERVO SYSTEMS PMC USES INPUT SENSORY DEVICES, ACTUATORS AND OTHER FEEDBACK DEVICES 6 MOTION CONTROL/SERVO SYSTEMS A MICROPROCESSOR BASED SYSTEM WILL INCLUDE A CONTROLLER, AMPLIFIER, ACTUATOR, AND FEEDBACK THE CONTROLLER INPUTS A SET OF INSTRUCTIONS INTO MEMORY AND TRANSLATES THEM INTO ELECTRICAL SIGNALS FOR THE AMPLIFIER 7 MOTION CONTROL/SERVO SYSTEMS A MICROPROCESSOR BASED SYSTEM WILL INCLUDE A CONTROLLER, AMPLIFIER, ACTUATOR, AND FEEDBACK THE AMPLIFIER TAKES THE SIGNALS, AMPLIFIES THEM TO CORRECT LEVELS FOR THE ACTUATOR 8 MOTION CONTROL/SERVO SYSTEMS A MICROPROCESSOR BASED SYSTEM WILL INCLUDE A CONTROLLER, AMPLIFIER, ACTUATOR, AND FEEDBACK THE ACTUATOR PERFORMS THE PHYSICAL MOTION NEEDED TO ACCOMPLISH THE TASK 9 MOTION CONTROL/SERVO SYSTEMS A MICROPROCESSOR BASED SYSTEM WILL INCLUDE A CONTROLLER, AMPLIFIER, ACTUATOR, AND FEEDBACK FEEDBACK IS ACCOMPLISHED THROUGH OPTICAL AND MAGNETIC ENCODERS AND RESOLVERS WHICH PROVIDE INFORMATION FOR ADJUSTMENTS TO THE CONTROLLER 10 MOTION CONTROL/SERVO SYSTEMS THE PURPOSE OF MOTION CONTROL ON ONE OR MORE OF THE PARAMETERS OF POSITION, VELOCITY, ACCELERATION, AND TORQUE 11 MOTION CONTROL/SERVO SYSTEMS VELOCITY CONTROL OR SPEED CONTROL IS QUANTIFIED WITH REFERENCE TO LOAD, THRUST OR TORQUE, AND SPEED REGULATION 12 MOTION CONTROL/SERVO SYSTEMS TORQUE CONTROL IS NEEDED TO DETERMINE THE APPROPRIATE FORCE INVOVLED INDEPENDENT OF SPEED 13 MOTION CONTROL/SERVO SYSTEMS POSITION CONTROL INVOVLES THE MOTION CONTROL OF DISPLACEMENT WITH RESPECT TO TIME 14 MOTION CONTROL/SERVO SYSTEMS AMPLIFIERS CAN BE CLASSIFIED DEPENDING ON THE CHARACTERISTICS OF THEIR OUTPUT 15 MOTION CONTROL/SERVO SYSTEMS AMPLIFIERS CAN BE CLASSIFIED DEPENDING ON THE CHARACTERISTICS OF THEIR OUTPUT DC AMPLIFIER IS LINEAR AND OUTPUTS A BI-DIRECTION DC VOLTAGE FOR POWERING A BRUSH-TYPE DC MOTOR 16 MOTION CONTROL/SERVO SYSTEMS AMPLIFIERS CAN BE CLASSIFIED DEPENDING ON THE CHARACTERISTICS OF THEIR OUTPUT BRUSHLESS DC AMPLIFIER IS LINEAR AND USED WITH A BRUSHLESS SERVO MOTOR 17 MOTION CONTROL/SERVO SYSTEMS AMPLIFIERS CAN BE CLASSIFIED DEPENDING ON THE CHARACTERISTICS OF THEIR OUTPUT BRUSHLESS AC AMPLIFIER IS LINEAR AND USED WITH A BRUSHLESS SERVO MOTOR 18 MOTION CONTROL/SERVO SYSTEMS AMPLIFIERS CAN BE CLASSIFIED DEPENDING ON THE CHARACTERISTICS OF THEIR OUTPUT VECTOR CONTROL AMPLIFER IS LINEAR AND IS CAPABLE OF SERVO CONTROL OF AN AC INDUCTION TYPE MOTOR 19 MOTION CONTROL/SERVO SYSTEMS BRUSH-TYPE DC MOTORS ARE OLDEST AND MOST USED IN INDUSTRIAL FEEDBACK SERVOS WITH THEIR TIME PROVEN TECHNOLOGY 20 MOTION CONTROL/SERVO SYSTEMS STEPPING MOTORS ARE USED IN AN “OPEN LOOP” AND OPERATE AT HIGH TORQUE AND LOW SPEED A SPECIALIZED AC MOTOR RUNS AN OPEN LOOP WHICH GIVES NO FEEDBACK SO THE CONTOLLER INSTRUCTS THE ACTUATOR AND THEN DOES NOTHING TO SEE IF THE JOB IS DONE 21 MOTION CONTROL/SERVO SYSTEMS BRUSHLESS MOTORS ALLOW LOWER ROTOR INERTIA AND EFFICIENT THERMAL DISSIPATION RESULTING IN FASTER ACCELERATION 22 MOTION CONTROL/SERVO SYSTEMS INDUCTION MOTORS NOW USE VECTOR CONTROL TO IMPROVE THE USE OF THESE MOTORS AND INCREASE THEIR USE IN SPINDLE APPLICATIONS 23 MOTION CONTROL/SERVO SYSTEMS FEEDBACK DEVICES CAN BE MOUNTED ON THE MOTORS AND IN THE CONTROL SYSTEM PROVIDES A NEGATIVE SIGNAL/NEGATIVE FEEDBACK 24 MOTION CONTROL/SERVO SYSTEMS FEEDBACK DEVICES INCLUDE OPTICAL ENCODERS AND RESOLVERS TWO TYPES ARE INCREMENTAL AND ABSOLUTE EACH OF WHICH IS HIGHLY ACCURATE AND INCREMENTAL OPTICAL ENCODERS ARE LOW COST 25 MOTION CONTROL/SERVO SYSTEMS FEEDBACK CAN PROVIDE THE SYSTEM WITH AN ERROR SIGNAL 26 MOTION CONTROL/SERVO SYSTEMS FEEDBACK DEVICES INCLUDE OPTICAL ENCODERS AND RESOLVERS RESOLVERS USE A POSITION TRANSDUCER UTILIZING MAGNETIC COUPLING FOR ABSOLUTE SHAFT POSITION 27 MOTION CONTROL/SERVO SYSTEMS FEEDBACK DEVICES CAN BE USED FOR SAFETY AND STATUS MONITORING MONITORING SYSTEMS FEEDBACK INFORMATION ABOUT ABNORMAL CONDITIONS 28 MOTION CONTROL/SERVO SYSTEMS ADJUSTABLE SPEED MOTORS AND DRIVES AC MOTORS AND DRIVES DC MOTORS AND DRIVES 29 MOTION CONTROL/SERVO SYSTEMS ADJUSTABLE SPEED MOTORS AND DRIVES AC MOTORS AND DRIVES ARE KNOWN AS “VOLTS PER HERTZ DRIVES” WHICH ARE OPEN LOOP INDUCTION MOTOR DRIVES 30 MOTION CONTROL/SERVO SYSTEMS ADJUSTABLE SPEED MOTORS AND DRIVES AC MOTORS AND DRIVES HAVE A NUMBER OF PROGRAMMABLE FEATURES: DISCRETE SPEED SELECTIONS ACCELERATION AND DECELERATION BOOST VOLTS/HERTZ SETTING 31 MOTION CONTROL/SERVO SYSTEMS ADJUSTABLE SPEED MOTORS AND DRIVES DC MOTORS AND DRIVES ARE THE LOWEST COST WITH THE BRUSH MOTOR’S WEAR LIMITING ITS USEFULNESS 32 MOTION CONTROL/SERVO SYSTEMS ADJUSTABLE SPEED MOTORS AND DRIVES DC MOTORS AND DRIVES ARE THE LOWEST COST WITH THE BRUSHLESS MOTOR’S BEING MORE EXPENSIVE THAN THOSE WITH BRUSHES 33 MOTION CONTROL/SERVO SYSTEMS SELECTING AC OR DC MOTORS OF ADJUSTABLE SPEEDS INVOLVES LOAD MOTOR LOADS ARE GROUPED BY TORQUE, HORSEPOWER AND SPEED 34 MOTION CONTROL/SERVO SYSTEMS CONSTANT TORQUE LOAD DEMANDS THE LOAD IS CONSTANT AT ALL SPEEDS WHICH CHARACTERISTICALLY IS NEEDED TO OVERCOME FRICTION 35 MOTION CONTROL/SERVO SYSTEMS CONSTANT HORSEPOWER IS DEMANDED WHEN THE INCREASE OF SPEED WILL DECREASE THE TORQUE 36 MOTION CONTROL/SERVO SYSTEMS A VARIABLE TORQUE LOAD MUST SATISFY THE MATHEMATICAL EQUATION TORQUE = CONSTANT(SPEED)2 37 MOTION CONTROL/SERVO SYSTEMS CLASSIFYING YOUR APPLICATION BY ANSWERING THE FOLLOWING QUESTION: WHAT TYPE OF PROCESS IS THE MOTION BEING APPLIED TO? 38 MOTION CONTROL/SERVO SYSTEMS QUESTION: WHAT TYPE OF PROCESS IS THE MOTION BEING APPLIED TO? WEB LINES, METAL REMOVAL, ROBOTICS, GENTRY, PACKAGING, TRANSFER LINES, AUTOMATED STORAGE/RETRIVAL SYSTEMS 39 MOTION CONTROL/SERVO SYSTEMS FOLLOWING CLASSIFICATION, THE APPLICATION PARAMETERS MUST BE DEFINED THIS WILL HELP DETERMINE THE MACHINE, MOTION CONTROL, ACTUATOR, AND FEEDBACK DEVICE REQUIREMENTS 40 MOTION CONTROL/SERVO SYSTEMS QUESTIONS TO BE ANSWERED FOR THESE APPLICATION PARAMETERS INCLUDE HOW MUCH?, HOW FAST?, AND HOW ACCURATE? 41 MOTION CONTROL/SERVO SYSTEMS THESE QUESTIONS ARE ANSWERED IN THE AREAS OF MOTION PARAMETERS, CONTINUOUS LOAD REQUIREMENTS, MACHINE CHARACTERISTICS, COMMUNICATION CHARACTERISTICS, INPUT/OUTPUT REQUIREMENTS AND FEEDBACK REQUIREMENTS 42 MOTION CONTROL/SERVO SYSTEMS MOTION REQUIREMENTS MUST BE UNDERSTOOD IN THE FOLLOWING FOUR CATEGORIES SIMPLE CONTROL OF POSITION OR VELOCITY OF SINGLE OR NONSYNCHORONIZED MULTIPLE AXES 43 MOTION CONTROL/SERVO SYSTEMS MOTION REQUIREMENTS MUST BE UNDERSTOOD IN THE FOLLOWING FOUR CATEGORIES MOTION SYNCHRONIZED TO EXTERNAL EVENTS 44 MOTION CONTROL/SERVO SYSTEMS MOTION REQUIREMENTS MUST BE UNDERSTOOD IN THE FOLLOWING FOUR CATEGORIES SYNCHRONIZED MULTI-AXIS CONTROL 45 MOTION CONTROL/SERVO SYSTEMS MOTION REQUIREMENTS MUST BE UNDERSTOOD IN THE FOLLOWING FOUR CATEGORIES COMPLEX MOTION ALGORITHMS 46 MOTION CONTROL/SERVO SYSTEMS THE PHYSICS OF MOTION MOMENTS OF INERTIA: EVERY MOVING BODY POSSESSES INERTIA AROUND A PARTICULAR AXIS CALCULATE THE MOMENT OF INERTIA FOR A BOWLING BALL WITH A DIAMETER OF 25cm AND A WEIGHT 4kg, THE MOMENT OF INERTIA AROUND ITS CENTER IS: J=(2/5)Mr2 ; J=(2/5)4kg(.125m) 2;J=.025kg(m) 2 47 MOTION CONTROL/SERVO SYSTEMS THE PHYSICS OF MOTION ANGULAR MOMENTUM THE ANGULAR MOMENTUM OF A ROTATIONAL BODY IS GIVEN BY THE RELATION ANGULAR MOMENTUM EQUALS MOMENT OF INERTIA TIMES ANGULAR (P=Jw). BODIES OR SYSTEMS IN ROTATIONAL MOTION, UNLESS ACTED UPON BY AN EXTERNAL FORCE, EXHIBIT CONSERVATION OF ANGULAR MOMENTUM(Jw) IS ACONSTANT) 48 MOTION CONTROL/SERVO SYSTEMS THE PHYSICS OF MOTION ANGULAR ACCELERATION ROTATING BODIES MAY UNDERGO CHANGES IN ANGULAR VELOCITY JUST AS BODIES IN TRANSLATION UNDERGO CHANGES IN THEIR LINEAR VELOCITY: A=(O1 – O2)/t 49 MOTION CONTROL/SERVO SYSTEMS THE PHYSICS OF MOTION TORQUE IS THE CAUSE OF ANGULAR ACCELERATION, IT IS EQUAL TO THE PRODUCT OF THE FORCE PERPENDICULAR TO THE RADIUS OF MOTION AND THE DISTANCE FROM THE CENTER OF ROTATION TO THE POINT WHERE THE FORCE IS APPLIED: T = F•r 50 MOTION CONTROL/SERVO SYSTEMS THE PHYSICS OF MOTION POWER IS TRANSMITTED BY ROTATING SHAFTS BY VIRTUE OF THE FACT THAT THE TORQUE APPLIED PRODUCES AN ANGULAR VELOCITY: P = Tw 51 MOTION CONTROL/SERVO SYSTEMS THE PHYSICS OF MOTION COEFFICIENT OF FRICTION IS THE FRICTIONAL FORCE BETWEEN TWO SURFACES, IT EQUALS THE PRODUCT OF THE FORCE PRESSING THE SURFACES TOGETHER TIMES THE COEFFICIENT OF FRICTION: F = WK 52 MOTION CONTROL/SERVO SYSTEMS DIFFERENTIATE CONTROLS OF HYDRAULIC AND PNEUMATIC CONTROLS 53