Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Power MOSFET wikipedia , lookup
Audio power wikipedia , lookup
Surge protector wikipedia , lookup
Integrating ADC wikipedia , lookup
Analog television wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Oscilloscope history wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Opto-isolator wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Index of electronics articles wikipedia , lookup
Interferometric synthetic-aperture radar wikipedia , lookup
Power electronics wikipedia , lookup
Phase-locked loop wikipedia , lookup
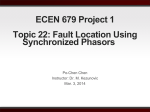
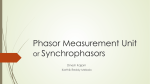
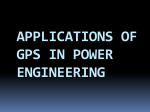
Study and Simulation of Phasor Measurement Unit for Wide Area Measurement System Ms .Darsana M. Nair Mr. Rishi Menon Mr. Aby Joseph PG Scholar Assistant Professor Principal Engineer Dept. of EEE Dept. of EEE Power Electronics Group Saintgits College Of Engineering Saintgits College of Engineering C-DAC Kottayam, Kerala Kottayam, Kerala Trivandrum, Kerala [email protected] square values of the currents and the voltages. A Abstract synchrophasor based WAMS, consists of Power system is now operating in a more geographically placed Phasor Measurement Units complicated situation and is facing more challenges (PMUs), which provide the measurements of both the than ever before. Synchronized phasor measurements magnitude and the phase angles of the voltage and have become a prominent technology for real time the current signals. These measurements are time- monitoring of power system. At present PMU is the synchronized using Global Positioning System (GPS) most sophisticated time-synchronized tool available with an accuracy of 1 ms [5]. to power engineers and system operators for wide area applications. It will improve visibility and The major applications of the phasor provide real time monitoring, protection, and control measurements of the system. This tool has been made possible by monitoring, protection and control. The phasors, advancements and measured at the same time instant, provide a snapshot availability of GPS signals. This paper describes the of the power system network and by comparing the modeling and testing of PMU in MATLAB/Simulink. snapshots of the consecutive time instants, not only Keywords: - Global positioning systems (GPS), the steady state but also the dynamic states of the Phasor measurement units (PMU), Wide Area critical nodes in the network can be tracked. The Monitoring Wide Area Monitoring System (WAMS) is primarily Systems (WAMS), Coordinated Universal Time used for managing the grid reliability by continuously (UTC). monitoring the status of the grid through PMU 1. INTRODUCTION deployed at specific location in the transmission in computer technology, include real-time power system The power system networks are recently network. The goal of wide area monitoring systems is being equipped with the synchrophasor based Wide to make the power system less immune to Area Monitoring System (WAMS). The conventional catastrophic failures and to reduce the severity of Remote Terminal Units (RTUs), forming part of the such failures when they do occur. Supervisory Control And Data Acquisition (SCADA) system, provide only unsynchronized root mean PMUs are the main building blocks in the synchrophasor based WAMS. They provide phasor And is commonly represented as the phasor as shown in Equation (2): X = (Xm/√2) e jΦ data with faster refreshment rate. The information (2) provided by them, i.e., the voltage and the current phasors, are Concentrators processed (PDCs) to at the extract Phasor the = (Xm /√2) (cos Φ + j sin Φ) Data relevant = Xr + j Xi information about the system operating condition. PMUs are devices able to sample high In the above equation, ω is the angular speed, time-stamped snapshots of voltage and current velocity θ is the initial angle between a reference in phasor format, frequency and rate of change of point and the positive peak. Xm is the peak amplitude frequency. Being synchronized to Coordinated of Universal Time (UTC) through Global Positioning phasor equals to the root mean square (RMS) value System (GPS) signal, these devices are able to of the waveform which is (Xm/ √2). The subscripts r provide real time measurements recorded from and i signify real and imaginary parts of a complex different parts of the power system, giving this way value in rectangular components. The value of Φ the potential to time-align these measurements and depends on the time scale, particularly where t = 0. It have a precise and representative view of the power is important to note this phasor is defined for the system. Phasor Data Concentrators (PDCs) are angular frequency ω; evaluation with other phasors devices able to concentrate measurements from must be done with the same time scale and different PMUs, time-align them and communicate frequency. the waveform. The magnitude of A phasor representation corresponds to a them as a single stream to other PDCs or to monitoring and control devices. In this paper pure following sections were presented. Section II situations, ac signals are typically distorted by the describes Phasor and PMU functions. Section III presence of harmonics. As the analysis of a signal is focuses the simulation of PMU to perform WAM always focused on specific frequency components, functions. voltage the extraction of the component of interest is monitoring, Phase angle monitoring, Frequency important. In a digital measurement system, this is monitoring, Rate of Change of Frequency monitoring usually realized by the “Discrete Fourier Transform” etc. (DFT) or the “Fast Fourier Transform” (FFT). A time WAM functions include sinusoid. However, in real world span for the measurement is selected, which is known II. PHASOR AND PMU FUNCTIONS as the “time window”. PMUs continuously sample A phasor is a vectorial representation of an ac signal with sinusoidal waveform. It is well known that a sinusoid can be written using the equation: X (t) = Xm cos (ωt + Φ) (1) the waveform using a moving time windows and update the value of the phasor that is output on a continuous basis. A phasor is a complex number that represents both the magnitude and phase angle of the sine waves found in electricity. Phasor measurements Fig. 1.Convention for synchrophasor representation that occur at the called derived from a scaled signal from voltage and current “synchrophasors”, as are the PMU devices that allow transformers are initially passed through anti-aliasing their measurement. In typical applications phasor filters. A PMU may collect data from different measurement widely locations in the system on a simultaneous basis and dispersed locations in the power system network and normally requires data from all three phases to synchronized from the common time source of a extract the positive sequence component, which is global positioning system (GPS) radio clock. what is normally of interest and contains information Synchrophasor technology provides a tool for system that can be used to assess the state of the power operators and planners to measure the state of the system. units same are time sampled are from electrical system and manage power quality. Under this definition, Φ is the offset from a cosine function at the nominal system frequency synchronized to UTC. A cosine has a maximum at t = 0, so the synchrophasor angle is 0 degrees when the maximum of x(t) occurs at the UTC second rollover (1 PPS time signal), and –90 degrees when the positive zero crossing occurs at the UTC second rollover (sin waveform)[2]. Figure 1 illustrates the phase angle/UTC time relationship. Phasor Measurement Unit There is no uniform structure adopted for commercially available PMUs as several companies provide such offerings. However, the functional blocks of a typical PMU are generic, and the common components are shown in figure 2. As shown in Figure.2, analogue input signals, which are PMUs are synchronized by satellites through a GPS receiver. The time accuracy of such system is typically in the order of a few hundred nanoseconds. Time stamps are created by the GPS receiver as a label of measurement and for future comparison of measurements. The other important function of the GPS receiver is that it can generate a one pulse-persecond signal to a phase-locked oscillator to synchronise and lock the phase of the sampling clock. Synchrophasors measure voltages and currents at principle intersecting locations (critical substations) on a power grid and can output accurately time-stamped voltage and current phasors. Because these phasors are truly synchronized, synchronized comparison of two quantities is possible, in real time. These comparisons can be used to assess system conditions-such as; frequency Fig 2.Functional block diagram of PMU. The III. SIMULATION OF PMU. For the study of functionality of PMU, its model is simulated in MATLAB/ Simulink platform. system was modeled in [3][4].MATLAB/ Simulink model of LABVIEW PMU is developed as shown in figure 3. Fig. 3. MATLAB/ Simulink Model for WAMS. SYSTEM DESCRIPTION 1. Voltage Phasor Measurement Block: Here a three phase source (415V, 50 Hz) is This subsystem receives the three phase voltage connected to a three phase load. PMU model is signal and extracts each phase voltages Va, Vb and placed between the source and load. It measures the Vc. Then it converts this voltage signal to its phasor voltage phasor, current phasor, frequency and rate of representation, i.e., in magnitude and phase angle change of frequency. form. This is shown in figure.3. 2. Current Phasor Measurement Block: frequency can shows the change in impedance of This subsystem receives the three phase power system components. We are able to observe current signal and extracts each phase current Ia, Ib stability of system through rate of change of and Ic. Then it converts this current signal to its frequency monitoring. phasor representation, i.e., in magnitude and phase angle form. This is also shown in figure.3. 3. Frequency Measurement Block: This subsystem basically contains a phase locked loop which can be used to synchronize on a set of variable frequency, three-phase sinusoidal signals. It outputs the measured frequency in Hz (ω /2pi) and ramp ω.t varying between 0 and 2*pi, synchronized on zero crossings of the fundamental (positive-sequence) of phase A. This signal is the given to ROCOF block. 4. Rate of Change of Frequency Measurement Block: The output signal from the frequency measurement block is differentiated to obtain the rate of change of frequency (ROCOF). Figure 4a and b shows the subsystem for magnitude and phase angle measurement. Fig.4b. Subsystem for phase angle measurement According to the convention for phasor representation phase angle φ is the offset from a cosine function at the nominal system frequency synchronized to UTC [2]. Thus a three phase balanced sinusoidal voltage waveform represented as: Va= Vm sin ωt Vb= Vm sin (ωt-120°) (3) Vc= Vm sin (ωt+120°) Can be represented as phasor form (according to IEEE synchrophasor convention) as below. Va= Vm /√2 < -90° Vb= Vm /√2 < 150° Vc= Vm /√2 < 30° Fig.4a. Subsystem for magnitude measurement We can measure frequency and rate of change of frequency through PMU. Change in (4) Fig. 5. Amplitude variation with change in frequency from 50 Hz to 49.95 Hz Effect of change in frequency angle difference between any pair of buses. With this Here the nominal frequency of the source is we can monitor angle separation or rate-of change of 50 Hz. If there is any change in the frequency from angle separation between two buses or two parts of a its nominal value there will be a corresponding grid to determine stress on the system. Another change in magnitude and phase angle of voltage. For important application of phase angle monitoring is verifying the effect of change in frequency, the during restoration. The phase angle value of an frequency of input wave is changed to 49.95 Hz. The opened tie line or an opened circuit breaker would variation in magnitude is shown in figure 5. help an operator in circuit breaker closing. Closing PMUs create a picture showing the stability status of the nodes in the monitored area. PMUs take would take place only if the phase angle was below a preset threshold. this picture at the same reference time. Using real- For the study of this, a two bus system is time information from PMUs and automated controls modeled in MATLAB/Simulink. Figure 5 shows the to predict, identify, and respond to system problems; model of such a system. Here PMUs are placed at bus a smart grid can automatically avoid or diminish 1 and 2 to measure the voltage phasors at nodes 1 and power outages, power quality problems and supply 2 respectively. disruptions. Va1, Vb1, Vc1 and Va2,Vb2,Vc2 are the three phase The relevance of phase angle monitoring comes into voltages at bus 1 and 2 respectively. Under normal picture only when we are able to compare the phase conditions the phase angles of two buses are as we angles of two different nodes in a network. For this obtained in the simulation study. If there is any we have to place two PMUs at two critical points in a abnormality in any of the buses, there will be a power system network. Then the difference in phase corresponding change in the phase angles of the angles obtained from these two points will give a affected bus. clear idea about the stability of the monitored area. By continuously monitoring, phase angle monitoring enables access in real time to the accurate phase Fig. 6. Simulink Model of Two bus system with PMUs placed at each bus [2] IEEE Standards for Synchrophasors for Power Systems, IEEE Power & Energy Society, Sponsored IV.CONCLUSION Performance of PMU is simulated and verified in MATLAB/Simulink. The model by the Power System Relaying Committee, IEEE Std C37.118.1™-2011. developed gives phasor information i.e., information [3] Vipin Krishna R, S. Ashok, Megha G Krishnan, “ about both magnitude and phase angle of the input Synchronized Phasor waveform. The time stamped information obtained International Conference from the Controls and Computation (EPSCICON), 8 – 10 PMU can be integrated with the Measurement on Power, Unit”, Signals, conventional SCADA system to make the operation January 2014. of the grid smarter and efficient. Also this [4] S. Mondal, Ch. Murty D. S. Roy, D. K. Mohanta, information can be used for the proper selection and “Simulation of Phasor Measurement Unit (PMU) coordination of relays to make WAM protection and Using Labview”. 14th International Conference on Control. Environment and Electrical Engineering (EEEICREFERENCES 2014), Krakow pp-164-168, 10-12 May 2014. [1] Ranjana Sodhi, S.C.Srivastava, “A simple scheme [5] A.G. Phadke and J.S.Throp, “Synchronized for wide area detection of impending voltage Phasor instability,” IEEE Transactions on Smart Grid, Vol. Springer, 2008. 3, No. 2, June 2012. Measurements and their applications”,