MATH 120-04 - CSUSB Math Department
... an orientation on such angles by designating the positive -axis ray as the initial ray and the other ray as the terminal ray. (What does it mean if these rays coincide?) Thus we adopt a dynamic viewpoint: the measure of this angle is determined by how we move from the initial ray to the terminal ray ...
... an orientation on such angles by designating the positive -axis ray as the initial ray and the other ray as the terminal ray. (What does it mean if these rays coincide?) Thus we adopt a dynamic viewpoint: the measure of this angle is determined by how we move from the initial ray to the terminal ray ...






Use the Geometry Calculator
... Determines the two-dimensional unit normal vector to vector v. Both vectors are considered 2D, projected on the XY plane of the current UCS. The orientation of the resulting normal vector points to the left of the original vector v. nor(p1,p2) Determines the 2D unit normal vector to line p1,p2. The ...
... Determines the two-dimensional unit normal vector to vector v. Both vectors are considered 2D, projected on the XY plane of the current UCS. The orientation of the resulting normal vector points to the left of the original vector v. nor(p1,p2) Determines the 2D unit normal vector to line p1,p2. The ...

Lecture Notes
... Proposition 4.3. If there is a continous map v : Sn → Sn such that v(x) ⊥ x for all x ∈ Sn , then the antpodal map is homotopic to the identity. The required homotopy is given by ht (x) := cos(πt)x + sin(πt)v(x) for t ∈ [0, 1]. For S1 note that this homotopy just rotates the circle through π radians ...
... Proposition 4.3. If there is a continous map v : Sn → Sn such that v(x) ⊥ x for all x ∈ Sn , then the antpodal map is homotopic to the identity. The required homotopy is given by ht (x) := cos(πt)x + sin(πt)v(x) for t ∈ [0, 1]. For S1 note that this homotopy just rotates the circle through π radians ...
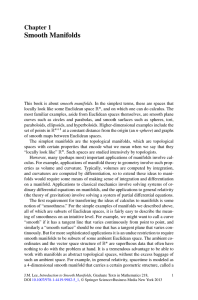
Smooth Manifolds
... In the first section of this chapter we describe the first of these structures. A topological manifold is a topological space with three special properties that express the notion of being locally like Euclidean space. These properties are shared by Euclidean spaces and by all of the familiar geomet ...
... In the first section of this chapter we describe the first of these structures. A topological manifold is a topological space with three special properties that express the notion of being locally like Euclidean space. These properties are shared by Euclidean spaces and by all of the familiar geomet ...

Smooth manifolds - IME-USP
... chart (U, ϕ) of N such that ϕ(U ∩ M ) = ϕ(U ) ∩ Rn , where we view Rn as a subspace of Rn+k in the standard way. We say that (U, ϕ) is a local chart of M adapted to N . Note that an embedded submanifold M of N is a smooth manifold in its own right in that an atlas of M is furnished by the restrictio ...
... chart (U, ϕ) of N such that ϕ(U ∩ M ) = ϕ(U ) ∩ Rn , where we view Rn as a subspace of Rn+k in the standard way. We say that (U, ϕ) is a local chart of M adapted to N . Note that an embedded submanifold M of N is a smooth manifold in its own right in that an atlas of M is furnished by the restrictio ...


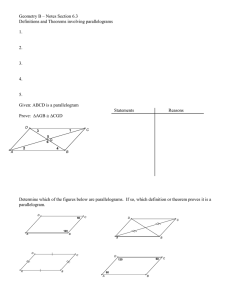
Given: ABCD is a parallelogram
... Determine which of the figures below are parallelograms. If so, which definition or theorem proves it is a parallelogram. D ...
... Determine which of the figures below are parallelograms. If so, which definition or theorem proves it is a parallelogram. D ...



Introduction to the Engineering Design Process
... they are pointing along the positive or negative x or y axis F = Fxi + Fyj (Cartesian vector form) F’ = F’x(-i) + F’y(-j) = - F’x(i) - F’y(j) The magnitude of each component of F is always a positive quantity, represented by the scalars Fx and Fy The magnitude of F is given in terms of its component ...
... they are pointing along the positive or negative x or y axis F = Fxi + Fyj (Cartesian vector form) F’ = F’x(-i) + F’y(-j) = - F’x(i) - F’y(j) The magnitude of each component of F is always a positive quantity, represented by the scalars Fx and Fy The magnitude of F is given in terms of its component ...

Formal groups laws and genera* - Bulletin of the Manifold Atlas
... homomorphism. Denote by r(F ) the formal series k,l r(akl )uk v l ∈ R0 [[u, v]]; then r(F ) is a formal group law over R0 . A formal group law F over a ring A is universal if for any formal group law F over any ring R there exists a unique homomorphism r : A → R such that F = r(F). Proposition 2.2. ...
... homomorphism. Denote by r(F ) the formal series k,l r(akl )uk v l ∈ R0 [[u, v]]; then r(F ) is a formal group law over R0 . A formal group law F over a ring A is universal if for any formal group law F over any ring R there exists a unique homomorphism r : A → R such that F = r(F). Proposition 2.2. ...