Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Power electronics wikipedia , lookup
Power MOSFET wikipedia , lookup
Josephson voltage standard wikipedia , lookup
Operational amplifier wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Mechanical filter wikipedia , lookup
Inertial navigation system wikipedia , lookup
Loading coil wikipedia , lookup
Crystal radio wikipedia , lookup
Wilson current mirror wikipedia , lookup
Current mirror wikipedia , lookup
Rectiverter wikipedia , lookup
Magnetic core wikipedia , lookup
Nanogenerator wikipedia , lookup
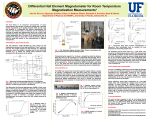
ANALOG SENSORS FOR MOTION MEASUREMENT TOPICS Introduction Motion transducers Potentiometers Variable inductance transducers Permanent magnet transducers Eddy current transducers Variable capacitance transducers Piezoelectric transducers Design criterion for control systems INTRODUCTION • Measurement of plant outputs and feedback signals are very important. • The measurement subsystem in a control system contains sensors and transducers that detect measurands and convert them into acceptable signalstypically voltages Sensor: A device for measuring some quantity. The sensor usually converts the measurement space to an electrical signal. Transducer: It is a device, that converts one type of energy to another. Transducers are used for compensation in different plants and systems. Help in reducing the sensitivity of a system to parameter change. Several analog sensor-transducer devices are commonly used in control system instrumentation We will deal with several analog motion transducers. • • • • • • MOTION TRANSDUCERS • Motion here means the four kinematics variables Displacement Velocity Acceleration Jerk • Each variable is a time derivation of the preceding one. • Motion measurement is extremely important for system’s or plant proper functioning. Examples: • Proximity sensors (to measure displacement) and accelerometers are the two most common types of measuring devices used in machine protection systems for condition monitoring, fault detection, control of large machinery. • Strain gages are used in measuring strains, they can be adopted to measure displacement by using auxiliary sensor element i.e. cantilever (spring), Resolver provides angular displacement. • Pulse generating transducers like digital tachometers can serve as both displacement and velocity transducer depending on absolute number of pulses generated is counted or the pulse rate is measured. Motion Transducers Motion transducers will be limited mainly to following types of devices: Potentiometers Variable inductance transducers Eddy current transducers Variable capacitance transducers Piezoelectric transducers Potentiometers •Uniform coil of wire or a film of high resistive material – carbon, platinum or conductive plastic •Resistance is proportional to its length. Resistive Element Wiper Arm vref (Supply) + i vo (Measurement) x (Measurand) No Current FIG 1 vref Load Z v%o Impedance i Nonzero Current FIG 2 • Slider displacement x is proportional to the output voltage vo kx + This relationship is valid only if the output terminals are open circuit (no current) as shown in FIG 1. The output voltage drops when a load with a finite impedance is connected which is shown in FIG 2. Because of this loading effect the linear relationship will no longer be valid Loading can also affect the supply (reference) voltage To minimize loading effects Use a stabilized power supply with low output impedance Signal conditioning circuitry with high input impedance An element with high resistance will have reduced power dissipation and less thermal effects However, increased resistance increases the output impedance resulting in loading non-linearity error FIG 3 shows the linear motion of the translatory potentiometer whereas the FIG 4 shows the angular motion of Rotatory potentiometer. Translatory and Rotatory potentiometers Resistive Element (Measurand) Wiper vo (output) x (Measurand) Wiper vref vo (output) FIG 3 Translatory for Rectilinear Motions vref FIG 4 Rotatory for Angular Motions VARIABLE-INDUCTANCE TRANSDUCERS These motion transducers employ the principle of electromagnetic induction Types of variable inductance transducers include Mutual induction transducers Self-induction transducers Permanent magnet transducers An AC excitation in the primary winding induces an AC voltage in the secondary winding as indicated in FIG 5. The amplitude of the induced voltage depends on the flux linkage between the two coils In mutual induction transducers change in the flux is effected by either Moving a ferromagnetic material on the flux path – LVDT, RVDT, mutual induction proximity probe Moving one coil with respect to the other – resolver, synchrotransformer vo Secondary Coil Core Primary Coil FIG 5 MUTUAL INDUCTANCE TRANSDUCER (Linear variable differential transformer (LVDT)) An LVDT transducer shown in FIG 6 comprises a coil former on to which three coils are wound. The primary coil is excited with an AC current, the secondary coils are wound such that when a ferrite core is in the central linear position, an equal voltage is induced in to each coil. The secondary are connected in opposite so that in the central position the outputs of the secondary cancels each other out. vo (Measurement) Primary Coil Insulating Form Core Ferromagnetic Core Secondary Coil Segment vref FIG 6 x Secondary Coil Segment LINEAR VARIABLE DIFFERENTIAL TRANSFORMER When the armature is in the central position there is an equal voltage induced in to both secondary coils. The sum of secondary outputs cancels each other out resulting in a zero output. As the armature moves in to sec1,the result is that sum of sec1 and sec2 favors sec1. As the armature moves in to sec2,the sum favors sec2. The output is an AC waveform which is indicated in FIG 7 FIG 7 LINEAR VARIABLE DIFFERENTIAL TRANSFORMER • Signal conditioning associated with differential transformers includes rectification and demodulation. • • FIG 8 shows Rectification. FIG 9 shows Demodulation. FIG 8 FIG 9 Self Induction Transducers Based on the principle of self induction. Only a single coil is employed as shown in FIG 10. Self Induction transducers are usually variablereluctance devices. This can be used as a displacement sensor FIG 10 Permanent Magnet Transducers A permanent magnet is used to generate a uniform and steady magnetic field. Permanent magnet transducers are used in measuring speed. Two types of speed are measured. Rectilinear speed Rectilinear velocity transducer shown in FIG 11 is used to measure rectilinear speed Angular speed. DC tachometer-generator in FIG 12 and AC tachometer-generator are used in measuring angular speed. Rectilinear velocity transducer FIG 11 DC Tachometer-generator FIG 12 Eddy Current Transducers Principle of Eddy current: An eddy current is caused by a moving magnetic field intersecting a conductor or vice-versa. The relative motion causes a circulating flow of electrons, or current, within the conductor. These circulating eddies of current create electromagnets with magnetic fields that oppose the change in the external magnetic field. The stronger the magnetic field, or greater the electrical conductivity of the conductor, the greater the currents developed and the greater the opposing force. This principle is used in eddy current proximity sensor FIG 13 illustrates concept of Eddy current FIG 13 Eddy current proximity sensor The Eddy Current Transducer uses the effect of eddy (circular) currents to sense the proximity of non-magnetic but conductive materials. A typical eddy current transducer contains two coils: an active coil (main coil) and a balance coil as shown in FIG 14. The active coil senses the presence of a nearby conductive object, and balance coil is used to balance the output bridge circuit and for temperature compensation. FIG 14 Schematic diagram of eddy current proximity sensor FIG 15 •Active coil and compensating coil forms arms of inductance bridge. •When a measurand brought to near to active coil, due to eddy current which produces eddy current magnetic field that opposes active coil field causes change in inductance and thus creates imbalance in inductance bridge. •This change is noted in calibrated unit. Variable capacitance transducers A variable capacitor is a capacitor whose capacitance may be intentionally and repeatedly changed mechanically or electronically. Capacitance of two plate capacitor is given by C=KA / x A change in anyone of K,A,x may be used in sensing process. Variable capacitance is used to convert physical phenomena into electrical signals Types of capacitor sensors capacitive rotation sensor capacitive displacement sensor capacitive liquid level sensor Variable capacitance transducers Capacitive rotation sensor Angular displacement of one of the plates causes the a change in A (area of plate) which is shown in FIG 16. FIG 16 Variable capacitance transducers Capacitive Displacement sensor Transverse displacement of one of the plates changes x (distance between plates) as shown in FIG 17. FIG 17 Variable capacitance transducers Capacitive liquid level sensor A change in K (depends on dielectric properties of medium between two plates) is produced as the fluid level between the capacitor plate changes The advantage of capacitance transducer is negligible loading effects. FIG 18 shows change in K value used to measure the displacement FIG 18 Piezoelectric transducers • Piezoelectric materials: Barium titanate, single crystal quartz. • Piezoelectric Effect: When mechanical stress or strain is applied to the piezoelectric material, generates an electric charge and associated potential difference. • The direct application of piezoelectric effect is used in pressure and strain measuring devices The Piezoelectric Effect Crystal material at rest: No forces applied (as shown in FIG 19), so net current flow is 0 Crystal +-+-+- Current Meter =0 Charges cancel each other, so no current flow +-+-+- FIG 19 The Piezoelectric Effect Crystal material with forces applied in direction of arrows (FIG 20). Crystal --Force +++ Due to properties of symmetry, charges are net + on one side & net - on the opposite side: crystal gets thinner and longer Current Meter deflects in + direction FIG 20 The Piezoelectric Effect Changing the direction of the applied force………..(FIG 21) Crystal ++++ Force ----…. Changes the direction of current flow, and the crystal gets shorter and fatter. Current Meter deflects in direction FIG 21 Piezoelectric accelerometer Piezoelectric velocity transducer: It uses piezoelectric accelerometer and an integrating amplifier along with impedance matching amplifier which is show in FIG 22. FIG 22 Piezoelectric displacement transducer: It is obtained by using a double integration of piezoelectric accelerometer. Piezoelectric Sensor It may be represented as a charge source with a series capacitive impedance Z as shown in FIG 23 Z = 1/jwc Fig 23 Piezoelectric sensors have a limitation on the useful lower frequency. Piezoelectric accelerometer Accelerometers are acceleration measuring devices. The piezoelectric accelerometer is a piezoelectric motion transducer. It is based on d’ Alembert’s principle which states that “ If a force of magnitude Ma were applied to the accelerating mass in the direction opposing the acceleration, then the system could be analyzed using static equilibrium considerations.” FIG 24 DESIGN CRITERION FOR CONTROL SYSTEM Accuracy is affected by parameter changes in the control system components and by the influence of external disturbances Consider general feedback control as shown in FIG 25 system to parameter changes and to external disturbances. GP(s) = Transfer function of the plant ( Of the system to be controlled) Gc(s) = Transfer function of the controller ( Including Compensators) H(s) = Transfer function of the output feedback system ( Including the measurement system) u = System input command ud = External disturbance input y= system output FIG 25 After analyzing the feedback back control system we can stipulate the following design criterion for the system. Make the measurement system (H) very accurate and stable Increase the loop gain to reduce the sensitivity of the control system to changes in the plant and controller . Increase the gain of GcH to reduce the influence of external disturbances Conclusion Analog Transducers play a very important part in insuring proper functioning of the systems. They are simple, user friendly and reliable. But with increase in complexity and need for accuracy in modern day plants use of analog transducers is very limited. Newly developed Digital and Optical Transducers are more apt for use in these plants. References: Sensors and Actuators by C W Desilva. http://en.wikipedia.org/wiki/Sensor http://en.wikipedia.org/wiki/Eddy_current http://www.infoplease.com/ce6/sci/A0839004. html http://www.encyclopedia.com/doc/1E1piezoele.html Discussions Discuss briefly Eddy current Proximity sensor. How does linear displacement is measured using potentiometer ? Explain how different motions are measured using Variable capacitance transducers ? Questions and comments…