Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Undergraduate Research Opportunity
Programme in Science
STRONGLY CONNECTED SPACES
Submitted by
Dai Bo
Supervised by
Dr. Wong Yan-loi
Department of Mathematics
National University of Singapore
Academic Year 1999/2000
ABSTRACT
When discussing the concept of connectedness, we often come across the equivalent
criterion that a space is connected if and only if any continuous map from it to the
discrete space {0,1} is constant. It would be interesting to see what concept arises if
the discrete space of two points is replaced by some other spaces. Let Z be a T1 space
which has more than one point, then a space X is said to be Z-connected if and only if
any continuous map from X to Z is constant. It can be shown that this idea generates
some stronger notion of connectedness and this stronger notion has many similarities
with the usual concept of connectedness. The first nontrivial example of Z-connected
space can be constructed by taking Z to be the space Ζ of integers equipped with the
complement finite topology. Define a space X to be strongly connected if and only if
it is Ζ–connected. We shall show in this paper that strongly connected spaces have
many interesting properties.
TABLE OF CONTENTS
CHAPTER 1: INTRODUCTION ……………………………………………….
1
1.1 REVIEW OF THE REPORT ……………………………………………... 1
1.2 ACKNOWLEDGEMENT ………………………………………………...
2
CHAPTER 2: REVIEW OF CONNECTED SPACES ………………………...
3
2.1 CONCEPT OF CONNECTEDNESS .…………………………………….. 3
2.2 PROPERTIES OF CONNECTED SPACES .……………………………… 4
2.3 EXAMPLES OF CONNECTED SPACES ………………………………. 6
CHAPTER 3: Z-CONNECTED SPACES ……………………………………… 9
3.1 CONCEPT OF Z-CONNECTEDNESS ..……………………………….…. 9
3.2 EXAMPLES OF Z-CONNECTED SPACES …………………………….. 10
3.3 PROPERTIES OF Z-CONNECTEDNESS ………………………………. 13
CHAPTER 4: STRONGLY CONNECTED SPACES ………………………… 18
4.1 CONCEPT OF STRONGLY CONNECTEDNESS ………………….…... 18
4.2 USUAL PROPERTY FOR STRONGLY CONNECTED SPACES ………20
4.3 STRONGLY CONNECTEDNESS IN COMPACT SPACES
……….…. 20
4.4 STRONGLY CONNECTEDNESS IN COMPLETE METRIC SPACES… 23
4.5 EXAMPLES OF STRONGLY CONNECTED SPACES…………………..24
CHAPTTER 5: CONCLUSION ………………………………………………… 29
5.1 SUMMARY OF THE WORK .…………………………………………… 29
5.2 FURTHER DISCUSSION….…………………………………………….. 30
REFERENCES …………………………………………………………………... 31
CHAPTER 1
----------------------------------------------------------------------------------------------------------------------------
INTRODUCTION
----------------------------------------------------------------------------------------------------------------------------
In the study of calculus, there is a basic theorem about continuous functions called
Intermediate Value Theorem. If f: [a, b] → R is continuous and r is a real number
between f(a) and f(b), then there exists an element c ∈ [a, b] such that f(c) = r. This
theorem is used in a number of places, for instance when constructing inverse functions
such as sin-1(x). The property of the space [a, b] on which the Intermediate Value
Theorem depends is the connectedness, and as the Intermediate Value Theorem is a
fundamental theorem for analysis, the notion of connectedness is very important in higher
analysis, geometry and topology -- indeed, in almost any subject for which the notion of
topological space is relevant. However, some connected spaces are not intuitively
connected. To describe such cases, we need a stronger notion of connectedness, which is
exactly what this project is about.
1.1 OVERVIEW OF THE REPORT
The main body of this report is divided into three parts:
1. Review of connected spaces
2. Z-connected spaces
3. Strongly connected spaces
The first part offers a quick review of connectedness, including the definition of
connectedness, some properties and examples of connected spaces. This is the starting
point of the whole project.
The second part introduces the concept of Z-connectedness. It shows that how the
definition is obtained, what kind of spaces that the Z-connectedness gives us, and how it
1
is similar to the connectedness. It will also be shown in this part that the Z-connectedness
is a stronger notion of connectedness.
In the third part, we will introduce the other new concept called strongly connectedness.
A strongly connected space is actually a special case of Z-connected space, which is
constructed by choosing a suitable space Z. In this part, the definition of strongly
connected spaces is compared with that of connected spaces. Also, some interesting
properties of indicating a strongly connected space will be given.
1.2 ACKNOWLEDGEMENT
I would like to express my deepest gratitude to my supervisor, Dr Wong Yan-loi, for his
utmost patience and guidance in my project. It is him who lets me know about topology
from the very basis and gives me great help throughout the year. This course is indeed a
bit difficult, but with his help, I find it invaluable. I would also like to thank my
classmates for their encouragement and advice.
2
CHAPTER 2
----------------------------------------------------------------------------------------------------------------------------
REVIEW OF CONNECTED SPACES
----------------------------------------------------------------------------------------------------------------------------
2.1 CONCEPT OF CONNECTEDNESS
Intuitively, a connected space is the one that cannot be separated into two or more parts.
It is easy to see that the subspace [0, 1] in the real line is connected, whereas the subspace
[0, 1] ∪ [2, 3] is not connected. However, a formal definition is necessary when dealing
with problems such as whether the subspace Q of R is connected, or whether the space
¡ l with the lower limit topology is connected.
DEFINITION 2.1 A space X is connected if and only if any continuous map f from X to
the discrete space {0, 1} is constant. A subset A in a space X is said to be connected if A
with the subspace topology is a connected space.
There is another equivalent criterion, which is often taken as the definition. It makes use
of the concept of separation. A separation of a space X means a pair of nonempty open
sets U and V, such that
U ∪ V = X, and U ∩ V = ∅,
In symbols, X = U | V.
DEFINITION 2.2 A topological space X is connected if and only if it has no separation.
Proof. Suppose X is connected and it has a separation U | V. Define f : X → {0, 1} by
f (x) = 0 if x ∈ U,
f (x) = 1 if x ∈ V.
3
Then this f is continuous and not constant. It contradicts the connectedness of X.
Conversely, if X is not connected, then there exists a continuous map f : X → {0,1},
and f is not constant. f -1(0) and f -1(1) is nonempty and
f -1(0) ∪ f -1(1) = X, f -1(0) ∩ f -1(1) = ∅
Thus X has a separation f -1(0) | f -1(1).
2.2 PROPERTIES OF CONNECTED SPACES
Connectedness is a very useful concept, and it has many important properties. These
properties, as well as the proofs, can be found in most books about general topology, thus
only the outline of the proofs are shown in this chapter.
PROPOSITION 2.3: A continuous image of a connected space is connected.
Proof: Let f : X → Y be a continuous surjective map and X is connected.
Suppose Y is not connected, then by definition, Y has a separation, say U | V. Let M
= ƒ -1(U), N = ƒ -1(V), then U, V are disjoint open sets of X, and form a separation of
X. This contradicts the fact that X is connected. Therefore, Y must be connected.
PROPOSITION 2.4: The union of any family of connected sets with a common point is
connected.
Proof: Let { Xα } be a family of connected set and p ∈ Xα for all α.
Let f : ∪Xα → { 0, 1 } be any continuous map and fα : Xα → { 0, 1 } be the restriction
of f to Xα. Since f is continuous, each fα is continuous. Xα is connected, so fα is
constant.
Now p ∈ Xα for all α and fα(Xα) = f(p) for all α, and f( ∪ Xα) = f(p), i.e. f is constant.
Therefore ∪ Xα is connected.
PROPOSITION 2.5: Let A and B be subsets in a space X such that A ⊆ B ⊆ A , where
A is the closure of A. If A is connected, then B is connected.
Proof: If B is not connected, it has a separation U | V. A is connected, A ⊆ U or A ⊆ V.
4
Without loss of generality, let A ⊆ U. As A ⊆ U ⊂ B, we take closure of A and U in
B
B
B, A ⊆ U . Also, A = A ∩ B = B ⊇ U , we have B = U. Thus U | V is not a
separation, and B is connected.
For each point p in a space X, the component C(p) of X is the largest connected set in X
which contains the point p.
PROPOSITION 2.6: For each point p in a space X, the component C(p) of X is a closed
set of X.
Proof: By definition, C(p) is the largest connected set of X containing the point p.
By the last proposition, the closure of C(p) is connected. Hence C ( p ) = C(p) and
C(p) is closed.
PROPOSITION 2.7: The topological product of an arbitrary family of connected spaces
is connected.
Proof: A proof of the above proposition can be found in [6].
The concept of locally connectedness is often mentioned when talking about
connectedness. A locally connected space is defined in term of neighborhood.
DEFINITION 2.8 A space X is locally connected at a point p if and only if every
neighborhood of p contains a connected neighborhood of p. X is said to be locally
connected if it is locally connected at each of its points.
The following two propositions are very useful when a locally connected space is
involved.
PROPOSITION 2.9: Every open subspace of a locally connected space is locally
connected.
Proof: This is an immediate consequence of the definition.
5
PROPOSITION 2.10: For any space X, the following statements are equivalent:
(1) X is locally connected.
(2) The components of every open subspace of X are open.
(3) The connected open sets of X form a basis of the topology of X.
Proof: (1) ⇒ (2). Let X be a locally connected space and let U be an open subspace of X.
By Propostion 2.9, U is a locally connected space. Also, the components of U are
open sets of U. Since U is open, these components are also open in X.
(2) ⇒ (3). Assume the components of every open subspace of X are open and let U be
any open set of X. Since the components of U are connected, U is the union of a
collection of connected open sets of X. This proves (3).
(3) ⇒ (1). Assume (3) holds and let U be any open neighborhood of an arbitrary point
p in X. By (3), U is the union of a collection of connected open sets. Hence there
exists a connected open set V such that p ∈ V ⊂ U. Thus X is locally connected at p.
Since p is arbitrary, X is locally connected.
Recall in the two or three-dimensional Euclidean space, any two points are connected if
they can be joined by a continuous curve. A path connected space is defined similarly.
DEFINITION 2.11: A space X is path connected if and only if for any two points a and b
in X, there exists a continuous path α : I → X such that α(0) = a, α(1) = b.
A path connected space have the following property.
PROPOSITION 2.12: Every path connected space is connected.
2.3 EXAMPLES OF CONNECTED SPACES
With the above definitions and propositions, some examples of connected spaces can be
easily found.u
(1) Any indiscrete space is connected.
6
(2) Any interval of R is connected.
(3) The unit n-cube I n of the Euclidean space R n is connected.
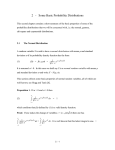
(4) Let G be the graph of y = sin
1
for x > 0, and I be the line segment joining the points
x
(0, -1) and (0, 1). Then the space G ∪ I is connected. The graph is shown as follows.
Fig 1. graph for the example.
There are also some spaces that are not connected, for example,
(5) The subspace Q of R is not connected.
(6) ¡ l is not connected.
PROOF OF THE EXAMPLES:
(1) An indiscrete space does not have any proper open sets, so it cannot have a
separation. Therefore an indiscrete space is connected by definition.
7
(2) Any interval is a path connected subspace of the real line
, thus it is connected
by proposition 2.12.
(3) This is the consequence of proposition 2.7 and the last example.
(4) The graph G is path connected and connected. I is the set of limit points of G
since for any point p on I and any neighborhood U of p, U always intersects G. By
proposition 2.5, G ∪ I is connected.
(5) An irrational number can always be found to separate the set into two parts and
thus form a separation.
(6) Any open set in ¡ l , say [a, b), has a separation [a, c) | [c, b).
8
CHAPTER 3
----------------------------------------------------------------------------------------------------------------------------
Z-CONNECTED SPACES
----------------------------------------------------------------------------------------------------------------------------
3.1 CONCEPT OF Z-CONNECTEDNESS
Recall the definition of connectedness, a space X is connected if and only if any
continuous map from X to the two-point space with the discrete topology is constant. The
concept of Z-connectedness is obtained by replacing the discrete space {0, 1} by some
other space Z.
DEFINITION 3.1 Let Z be a topological space with more than one point. A space X is Zconnected if and only if any continuous map from X to Z is constant.
Note that in the above definition, Z is restricted to be a space with more than one point.
Otherwise, the image of X is always constant and the definition makes no sense.
As an immediate consequence, the following proposition can be proved.
PROPOSITION 3.2 A Z-connected space is connected.
Proof: Since Z has at least two points, there exists a continuous injection i such that
i : {0, 1} → Z
Then for any continuous map f : X → {0, 1}, i o f is also a continuous function.
Now X is Z-connected, by definition, i o f is constant, thus f is constant.
Therefore, X is connected.
9
This proposition ensures that the new Z-connectedness is stronger than original
connectedness, and the definition of Z-connected spaces is suitable for the purpose of
finding a stronger notion of connectedness.
3.2 EXAMPLES OF Z-CONNECTED SPACES
To get a better understanding of Z-connected spaces, we need some examples. If a space
X is Z-connected, the property of X depends greatly on the space Z. So we start our
discussion with various space Z. There are two approaches: the connectedness of Z and
the topological property of Z.
First let's begin with the connectedness of Z. Roughly speaking, there are three
possibilities:
(1) Z is totally disconnected
(2) Z is a collection of connected components, i.e. Z = {Zλ | λ ∈ Λ }
(3) Z is connected
The following proposition shows that if Z is totally disconnected, the definition of Zconnectedness has the same meaning as the usual connectedness.
PROPOSITION 3.3: If Z is totally disconnected, Z-connectedness is equivalent to
connectedness.
Proof: By proposition 2.2, if X is Z-connected, it is connected.
Conversely, if X is connected and Z is totally disconnected, then for any continuous
map f : X → Z, f [X] is connected. However, the only connected subset of Z is onepoint space, so f is constant. Therefore, X is Z-connected.
The next proposition shows that Z may be assumed to be connected.
10
PROPOSITION 3.4: Let Z be a space that is not totally disconnected and let Z = {Zλ |
λ ∈ Λ} be the collection of all connected components of Z. Then for any space X, X is Zconnected if and only if X is Zλ-connected for all λ ∈ Λ.
Proof: Suppose X is Z-connected.
By definition, any continuous map from X to Z is constant. For all λ ∈ Λ, the
inclusion iλ: Zλ → Z is an injective continuous map. For any continuous map f : X →
Zλ, iλ o f : X → Z is continuous and constant. Therefore f is constant, i.e. X is Zλconnected.
Conversely, suppose X is Zλ-connected for all λ ∈ Λ. Since Z is not totally
disconnected, there exists at least a Zα having more than one point. X is Zαconnected, so by proposition 3.1, X is connected. For any continuous map g: X → Z,
g[X] is connected and belongs to some Zβ. X is Zβ-connected, so g is constant, X is
Z-connected.
Next, we shall see how the space X varies when different topologies are added to a twopoint set {0, 1}. Then there are only three types of topologies on Z, namely, indiscrete
topology, order topology, and discrete topology. For simplicity, we write
2i: the space {0, 1} with indiscrete topology, whose open sets are ∅, {0, 1};
2o: the space {0, 1} with order topology, whose open sets are ∅, {0}, {0, 1};
2d: the space {0, 1} with discrete topology, whose open sets are ∅, {0}, {1}, {0, 1};
CLAIM: X is 2i-connected, if and only if X is a one-point space.
Proof: If X is a one-point space, for any continuous map f : X → Z, f (X) is constant.
Conversely, if X has more than one point, X = U ∪ V, where U and V nonempty and
disjoint. Define f : X → Z by ƒ [U] = 0, ƒ [V] = 1. This function is continuous but not
constant. Thus X is not 2i-connected. Therefore X is not Z connected except that X is
one-point.
CLAIM: X is 2o-connected if and only if X is indiscrete.
11
Proof: If X is indiscrete, for any continuous map f from X to the space 2o, {0} is open in
the space 2o, so f -1(0) is open in X, thus f -1(0) = X or ∅.
If f -1(0) = X, ƒ(X) = 0; if f -1(0) = ∅, ƒ(X) = 1. In either case, ƒ is constant.
Conversely, if X is not indiscrete, there exists a proper open set S of X. Define f : X
→ {0, 1} by f [S] = 0, and f [X-S] = 1. Then f -1(0) = S, f -1({0, 1}) = X, thus f is
continuous but not constant, and hence not 2o-connected.
Therefore, X is 2o-connected if and only if X is indiscrete.
CLAIM: X is 2d-connected if and only if X is connected.
Proof: It is exactly the definition of a connected space.
The following proposition is a summary of the above cases.
PROPOSITION 3.5 Let Z be a two-point space. Then
(I)
X is 2i-connected if and only if X is a one-point space.
(II)
X is 2o-connected if and only if X is indiscrete.
(III)
X is 2d-connected if and only if X is connected.
This proposition can be generalized to finite case. For a finite space Z, it turns out that
these are the only types of connectedness that arise.
Recall separation axioms of a topological space, X is T1 if for any distinct x, y ∈ X, there
exists open neighborhoods U of x and V of y such that y is not in U and x is not in V. It is
easy to see that X is T1 if and only if every singleton set in X is closed. In the following
studies, this property will be used very often.
PROPOSITION 3.6 Let Z be a space that is not T1. If X is Z-connected, then X is either
indiscrete or is a one-point space.
Proof: Let Z be a space that is not T1, i.e. there exists a connected component Zλ that
contains more than one point. Suppose X is neither one point nor indiscrete, then X
has a proper open set. It is sufficient to prove that there exists a continuous map f : X
12
→ Z that is not constant. Define f : X → Z by f [U] = x, f [X – U] = y, where x and y
are elements of Zλ. Note that the subspace {x, y} is either 2i or 2o but never 2d, thus f
is continuous and not constant. Therefore, X is either indiscrete or is a one-point
space.
This proposition tells us that whether Z is T1 is crucial in generating nontrivial Zconnectedness. Note that a finite T1 space is discrete. The first nontrivial example of Zconnectedness can be constructed by taking Z to be the space Ζ of integers equipped with
the complement finite topology. In fact, Ζ is the coarsest space which is infinite and T1.
3.3 PROPERTIES OF Z-CONNECTEDNESS
The concept of Z-connectedness is very similar to that of connectedness. Most of results
for connected spaces still hold for Z-connected spaces, and they can be proved easily by
considering continuous maps into the space Z. To make the Z-connectedness nontrivial,
the space Z is assumed to be a T1 space.
For a connected space, a continuous image of a connected space is connected. And for a
Z-connected space, this property still holds.
PROPOSITION 3.7: A continuous image of Z-connected space is Z-connected.
Proof: Let X be any Z-connected space.
By definition, any continuous map from X to Z is constant. Let f : X → Y be a
continuous surjective map and g : Y → Z be continuous. Then g o f is continuous
and constant, so g[Y] is constant. Therefore, Y is Z-connected, i.e. the continuous
image of X is Z-connected.
If a collection of connected subspaces has a common point, then their union is connected.
A similar statement can be proved for Z-connected spaces.
13
PROPOSITION 3.8: If { Xα }is a collection of Z-connected subspaces of a space X such
that ∩α Xα
∅ , then ∪α Xα is Z-connected.
Proof: For any continuous map f: ∪α Xα → Z, let map iα: Xα → ∪α Xα be the inclusion
map and let f : ∪α Xα → Z be any continuous map. Since Xα is Z-connected, f o iα :
Xá Õ Z is continuous and thus constant. And ∩α Xα ≠ ∅ , so there exist a p such that
p ∈ ∩α Xα , i.e. p ∈ Xα for all α. Then f o iα is constant and equals to f (p).
Therefore, f is constant and ∪α Xα is Z-connected.
If A is a connected subset of a space X, and A ⊆ B ⊆ A , then B is connected. In Zconnected spaces, this proposition can be written as follows.
PROPOSITION 3.9: Let A and B be subsets in a space X such that A ⊆ B ⊆ A . If A is Zconnected, then B is Z-connected.
Proof: Let f : B → Z be any continuous map where A ⊆ B ⊆ A and let f | A: A → Z be
the restriction of f. Since A is Z-connected, and f | A is continuous, f | A (A) = f (A) is
B
constant. Z is a T1 space, thus f (A) is closed. Note that A = A ∩ B = B , therefore,
B
f ( B ) = f ( A ) ⊆ f ( A) = f ( A) . Thus f (B) is constant and B is Z-connected.
A Z-connected component containing p is defined as the largest Z-connected set in X
which contains the point p. For such a Z-connected component, the following property
can be proved.
COROLLARY 3.10: Each Z-connected component of a space is closed.
Proof: Let A be any Z-connected component, i.e. A is the largest Z-connected set in X
containing p. By proposition 3.9, A is Z-connected and closed. Also, A is larger than
A. Thus A = A , and a Z-connected component is closed.
Just like the product of an arbitrary family of connected spaces is connected, the product
of Z-connected spaces is Z-connected.
14
PROPOSITION 3.11: The topological product of an arbitrary family of Z-connected
spaces is Z-connected.
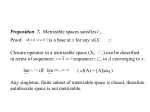
Proof: First, let's prove the product X × Y of Z-connected spaces X and Y is Zconnected. Let (a, b) and (c, d) be any two points of X × Y. Then X × {b} and
{c} × Y are Z-connected and have the intersection (c, b). By proposition 3.8,
X × {b} ∪ {c}× Y is Z-connected. Then the T-shaped space T = ( X × {b}) ∪ ({c}× Y ) is
Z-connected.
Y
g (c, d)
g (a, b)
X
Fig 2. A T-shaped space in XY plane.
The space X × Y is the union of all T-shaped spaces, and those spaces are Zconnected and have a common point (a , b) . Thus X × Y is Z-connected.
Next, for any finite product of Z-connected spaces,
X 1 × X 2 ×L × X n
is
homeomorphic to ( X1 × L × X n −1 ) × X n , and by induction, it is Z-connected.
Finally, let's consider an arbitrary family {Xα} of Z-connected spaces. Let X = Π Xα
and b be a given point in X. Define a subspace X (α1 ,Lα n ) of X. It consists of all
points ( xα ) such that xα = bα for α ≠ α1 ,Lα n . X (α1 ,Lα n ) is homeomorphic with
the finite product X α 1 × X α 2 × L × X α n , and hence is Z-connected. Then we define a
subspace Y be the union of the above subspaces, i.e. Y = ∪ X (α1 ,Lα n ) , and Y is Zconnected since all of X (α1 ,Lα n ) has a common point b.
CLAIM: Y = X under the product topology.
Proof of the claim: Let's take an arbitrary point ( xα ) of X and an arbitrary open
neighborhood U = ∏ Uα of ( xα ) , and prove U intersects Y.
15
Each set Uα is open in Xα, and Uα = Xα, except for finite indices, say α = α1 ,Lα n .
Construct a point ( yα ) of X by setting yα = xα for α = α1 ,Lα n , and yα = bα for
other values of α. Then ( yα ) is a point of Y since ( yα ) ∈ X ( α1 ,Lα n ). Also, it is a
point of U, since yα = xα ∈ Uα for all α = α1 ,Lα n and yα = bα ∈ xα for all other
values of α. Hence U intersects Y. This shows that Y = X . As Y is Z-connected, X is
Z-connected.
A local concept of Z-connectedness is also possible. A space X is said to be locally Zconnected if it has a basis consisting of Z-connected open sets. A connected component
of a locally connected space is open, and every open subspace of a locally connected
space is locally connected. A Z-connected component has the similar property.
PROPOSITION 3.12: Each Z-connected component of a locally Z-connected space is
open.
such that ∀ Bi ∈
Proof: Suppose X is a locally Z-connected space with basis
,
Bi is Z-connected. Let A be any Z-connected component of space X. Take any a ∈ A,
then there exists some B ∈
, such that a ∈ B. By definition of Z-connected
component, B ⊆ A. Thus A is union of open sets and hence is open.
PROPOSITION 3.13: Every open subspace of a locally Z-connected space is locally Zconnected.
Proof: Suppose X is locally Z-connected and
is basis of X such that every member of
is Z-connected. Let A be an open subspace. Then
'
={B∈
| B ⊂ A } is a
basis of A consisting of Z-connected open sets. Therefore A is locally Z-connected.
The locally Z-connectedness has another important property. That is, in a locally Zconnected space, the Z-connectedness equals connectedness.
PROPOSITION 3.14: Suppose X is locally Z-connected. Then X is connected if and only
if X is Z-connected.
16
Proof: If X is Z-connected, then X is connected by proposition 3.2.
Conversely, suppose X is connected and locally Z-connected. Take a Z-connected
component C of X, by 3.12, C is open in X, and by 3.10, C is open. As X is
connected, C = X. Therefore, X is Z-connected.
17
CHAPTER 4
----------------------------------------------------------------------------------------------------------------------------
STRONGLY CONNECTED SPACES
----------------------------------------------------------------------------------------------------------------------------
4.1 CONCEPT OF STRONGLY CONNECTEDNESS
In this chapter, the concept of strongly connected space will be introduced.
Recall the second definition of connectedness, a space is connected if it has no
separation. Now if the separation is extended from a pair of open sets U and V to
countable sets, a similar but slightly stronger connectedness can be produced. But here
we must use closed sets. The definition is given as follows.
DEFINITION 4.1 A space X is strongly connected if and only if it is not a disjoint union
of countably many but more than one closed set.
Note the similarity between this definition and that of connectedness.
If X is connected, and E1 and E2 are any two nonempty disjoint closed sets of X, then
X ≠ E1 ∪ E2.
If X is strongly connected, and Ei are nonempty disjoint closed sets of X, then
X ≠ E1 ∪ E2 ∪ E3 ∪ …
Recall the other definition of connectedness, that is, a space X is connected if and only if
any continuous map from it to the discrete space is constant. It is natural to seek a similar
definition for strongly connected spaces.
18
As mentioned last chapter, the first nontrivial example of Z-connected space is
constructed by taking Z to be the space of integers equipped with the complement finite
topology, denoted by Ζ. It can be proved that a strongly connected space defined above is
equivalent to the Ζ-connectedness. This fact is presented in the following definition.
DEFINITION 4.2 A space is strongly connected if and only if it is Ζ-connected.
Proof: Suppose X is strongly connected. Let f : X → Ζ be any continuous map.
CLAIM: A continuous image of a strongly connected space is strongly connected.
Proof of the claim: Using the above assumption, and further assume f is surjective.
Suppose f(X) is not strongly connected, by definition it is a disjoint union of
countably many but more than one closed sets. Since f is continuous, and the inverse
image of closed sets are still closed, X is also a disjoint union of closed sets.
Therefore, f(X) is strongly connected.
By claim, f(X) is strongly connected. The only strongly connected subset of Ζ are the
one-point spaces. Hence f is constant, i.e. X is Ζ-connected.
Conversely, suppose X is a disjoint union of countably many but more than
one closed sets, X = ∪ Ei. Then define f : X → Ζ by taking f(x) = i whenever x ∈ Ei.
This f is continuous and not constant. So X is not Ζ-connected. Therefore, X is
strongly connected if and only if it is Ζ-connected.
The similarity between this definition and that of connectedness is obvious. For any space
X and any continuous map f,
f : X Õ 2d
is constant
X is connected;
f: XÕ Ζ
is constant
X is strongly connected.
4.2 USUAL PROPERTIES FOR STRONGLY CONNECTED SPACES
From the second definition of strongly connectedness, a strongly connected space is
nothing but a special case of Z-connectedness. Thus, all the properties proved for Z-
19
connected spaces in the second chapter definitely apply to strongly connected spaces. At
the same time, it has many other interesting properties.
The properties, as a Z-connected space owns, can be summarized in the following
proposition, and the proofs are omitted, since they are exactly the same as the last
chapter.
PROPOSITION 4.3 Let X be a strongly connected space, then the following is true.
(1) Any continuous image of X is strongly connected.
(2) The union of any family of strongly connected sets with a common point is
strongly connected.
(3) Let A and B be subsets in a space X such that A ⊆ B ⊆ A , where A is the
closure of A. If A is strongly connected, then B is strongly connected.
(4) For each point p in a space X, the strongly connected component C(p) of X is
closed.
(5) The topological product of an arbitrary family of strongly connected spaces is
strongly connected.
(6) Every open subspace of a locally strongly connected space is locally strongly
connected. The component of a locally strongly connected space is open.
4.3 STRONGLY CONNECTEDNESS IN COMPACT SPACES
Strongly connectedness is a stronger notion of connectedness. In another word, given a
connected space, we can make it strongly connected by adding some conditions. But
what conditions should be added is the difficulty. Our starting point is a connected
spaces, thus a continuum may be useful. The concept of a continuum is defined on a
connected set.
DEFINITION 4.4 A compact connected set is called a continuum.
20
Let int(A) represents the interior of A, Cl(A) be closure of A, and bd(A) be the boundary
of A. Then a continuum has the following property.
PROPOSITION 4.5 If A is any continuum in a Hausdorff space and B is any open set
such that A ∩ B ≠ ∅ ≠ A ∩ (X – B), then every component of A ∩ Cl(B) intersects
bd(B).
Proof: The proof can be found in [2], page 41-42.
Using this result, we can prove that a Hausdorff continuum is strongly connected. Or said
differently,
PROPOSITION 4.6 Let X be a compact Hausdorff space. Then X is connected if and
only if X is strongly connected.
Proof: If X is strongly connected, then X is connected.
Conversely, if X is a compact Hausdorff connected space, and if it is not strongly
connected, then by definition, X is a union of a countably many but more than one
disjoint closed sets. X = ∪ Ki, where Ki are closed disjoint sets. Since a compact
Hausdorff space is normal, X is a normal space.
We can find an open set G1 such that K2 ⊆ G1, and Cl(G1) ∩ K1 = ∅ . Let X1 be a
component of Cl(G1) which intersects K2. Then X1 is compact and connected. Now
X1 ∩ bd(G1) ≠ ∅ , i.e. X1 contains a point p ∈ bd(G1) such that p ∉ G1 and p ∉ K1.
Hence X1 intersects some Ki for i > 2.
Let K n 2 be the first Ki for i >2 which intersects X1, and let G2 be an open set satisfying
K n 2 ⊂ G2, and Cl(G2) ∩ K2 = ∅ . Then let X2 be a component of X1 ∩ Cl(G2) which
contains a point of Kn2. Again we have X2 ∩ bd(G2) ≠ ∅ , and X2 contains some point
p ∈ bd(G2) such that p ∉ G2, p ∉ K1 ∪ K2. Hence X2 intersects some Ki for i > n2,
and X2 ∩ Ki = ∅ for i < n2.
Let Kn3 be the first Ki for i > n2, which intersects X2, then by methods similar to the
above we can find a compact connected X3 such that X3 ⊂ X2 ⊂ X1, and X3 intersects
some Ki with i > n3 but X3 ∩ Ki = ∅ for i < n3.
21
In this manner, we obtain a sequence of subcontinua of X: X1 ⊃ X2 ⊃ X3…, such that
for each j, Xj ∩ Ki = ∅ for i < nj and nj → ∞ as j → ∞ . we know that ∩ Xi ≠ ∅ .
Also, (∩ Xi) ∩ Kj = ∅ for all j, so that ( ∩ Xi) ∩ (∪ Kj)= ∅ or ( ∩ Xi) ∩ X = ∅ . But
(∩ Xi) ⊂ X, which contradicts the fact that ∩ Xi is nonempty.
Therefore, if X is a compact Hausdorff space, it is connected if and only if it is
strongly connected.
We know that connectedness and local connectedness are similar in some manner, thus it
is natural to think of the above proposition in a local way. Indeed, a local version is also
true.
PROPOSITION 4.7 Let X be a locally compact Hausdorff space. Suppose X is locally
connected. Then X is locally strongly connected.
Proof: Let O be an open neighborhood of a point x ∈ X. Then there exists a compact
neighborhood V of x lying inside O. Let C be a connected component of V containing
x. Since V is a neighborhood of x and X is locally connected, C is a neighborhood of
x. Since C is closed in V and V is compact, C is compact. C is a compact connected
neighborhood of x lying inside O. By proposition 4.6, C is strongly connected.
There is one way to combine proposition 4.6 and 4.7, and it is stated in the next
proposition.
PROPOSITION 4.8 Let X be a locally compact Hausdorff space. Suppose X is locally
connected and connected. Then X is strongly connected.
Proof: This follows from proposition 3.10 and proposition 4.7.
COROLLARY 4.9 A strongly connected T1 space having more than one point is
uncountable.
Proof: A one-point set in a T1 space is closed, thus by the definition of strongly
connected space, a T1 space cannot have countably many but more than one point.
22
COROLLARY 4.10 The space ¡ n is uncountable.
Proof: ¡ is strongly connected, and by proposition 4.3.5, ¡ n is strongly connected. By
corollary 4.9, it is uncountable.
Note that a continuum is different from a connected space essentially because it is
compact. A similar topological property to compactness is complete metric, thus we
continue our discussion with complete metric spaces.
4.4 STRONGLY CONNECTEDNESS IN COMPLETE METRIC SPACES
In a metric space, a Cauchy sequence is a sequence (xn) of points in X such that for every
positive real number ε, there exists a positive integer n satisfying
d [xi, xj] < ε
for all integers i > n and j > n.
A metric space X is said to be complete if and only if every Cauchy sequence in X
converges to some point in X.
In a complete metric space, the following property can be shown.
PROPOSITION 4.11 A connected locally connected complete metric space is strongly
connected.
Proof: Let X be a connected locally connected complete metric space.
Suppose that X is a countable disjoint union ∪ Ei, where Ei is closed. Since X is
connected, we may assume that each Ei is nonempty. Let k be a positive integer.
Since X is a locally connected metric space, the collection Χk of all connected open
sets of diameter less than
1
is a basis for the topology of X. Let ϑ1 = {O ∈ Χ1 | O ⊂
k
X \ E1}. Then X \ E1 = ∪i∞= 2 Ei = ∪o∈ℑ2 O.
CLAIM: One of the member in ϑ1 intersects infinitely many Ei’s for i > 1.
23
Proof of the claim: Suppose it is not true, then each of these connected open sets in ϑ1
lie in some Ei for some i >1. Thus each Ei is a union of some of these open sets and
hence is open. This contradicts the fact that X is connected.
Let O1 be a member in ϑ1 which intersects infinitely many Ei’s for i >1. In particular,
this implies that O1 \ E2 is nonempty.
Next let ϑ2 = {O ∈ Χ2 | O ⊂ O1 \ E2}. Then O1 \ E2 = ∪o∈ℑ2 O . The connectedness of
O1 implies that there exists a member O2 in ϑ2 which intersects infinitely many Ei’s
for i > 2. Therefore O2 \ E3 is nonempty.
Continuing in this way produces a decreasing sequence O1 ⊃ O2 ⊃ O3…of nonempty
connected open subsets of X such that for each positive integer k, Ok ∈ Χk, Ok ⊂ Ok-1 \
Ek. Here O0 is taken to be X.
Now for each positive integer k, pick an element xk ∈ Ok. Since the diameter of Ok is
less than
1
, (xk) is a Cauchy sequence. By the completeness of X, (xk) converges to
k
an element x ∈ X. Hence X lies in some En. But x also lies in On, this contradicts the
fact that On is disjoint from En. Consequently, x cannot be expressed as a disjoint
union of countably many but more than one nonempty closed subsets. This shows that
X is strongly connected.
4.5 EXAMPLES OF STRONGLY CONNECTED SPACES
In this section, we emphasis on those spaces that are connected but not strongly
connected, since these spaces help us to differentiate connectedness and strongly
connectedness.
The first example is the space Ζ. It is connected since it has no separation, and it is not
strongly connected since the identity map from Ζ to itself is not constant.
The second example is given in [1], and it is all the rational points in the plane on or
above the x-axis with following topology. If (a, b) ∈ X, then the neighborhood of (a, b) is
24
{( a, b )} ∪ ( r ,0 ) ∈ ¤
2
b
b
2
: r − a −
<
ε
∪
r
,0
∈
¤
:
r
−
a
+
<
ε
(
)
3
3
And its graph representation is
y
(a, b)
b
a+
(
-ε
)
+ε
(
-ε
)
+ε
3
x
Fig 3. graph representation for example (2).
This example is not strongly connected, since the rational points are countable, and as a
subset of ¤ 2 , the space is also countable. It is T1 since it is Hausdorff. Thus by corollary
4.9, it is not strongly connected.
Its connectedness follows from the next claim.
CLAIM: If any pair of neighborhood of a space has a common limit point, the space is
connected.
Proof of the claim: Suppose the space X is not connected, then it has a separation U | V.
U and V are both open and closed, thus they do not have a common limit point.
Therefore, X must be connected.
For this example, the closure of any neighborhood is
y
25
(a, b)
b
3
a+
(
-ε
)
+ε
(
-ε
)
+ε
x
Fig 4. graph for the closure of an open set
Thus any two neighborhood has at least one point in common, i.e. in the following graph,
A1 meets A2 at some point.
A1
A2
y
(a, b)
(
-ε
)
+ε
(
-ε
)
+ε
Fig 5. two neighborhood always meet
The last example can be found in [5], and it is interesting because it is not easy to find a
connected subspace in ¡ 2 that is not strongly connected. It is the union of
(i)
xn = {(2− n+1 , y ) ∈ ¡ 2 | 0 ≤ y ≤ 1} , n = 0, 1, 2… …
26
x
(ii)
3
3
yn = (0, y ) ∈ ¡ 2 | n +1 < y < n
2
2
(ιιι)
π
zn = (2− n+1 cosθ , 2− n+1 sin θ ) ∈ ¡ 2 | ≤ θ ≤ 2π
2
The graph for it is
Fig 6. graph representation for example (3).
∞
Note that cn = xn ∪ yn ∪ zn is connected, and X n = U cn .
n =0
It is clearly a disjoint union of closed set, and hence not strongly connected.
To prove its connectedness, we take an arbitrary nonempty subset U that is both open and
closed in X, and show this U = X.
First of all, U is nonempty, so there is at least one point p ∈ U. Then p ∈ cn for some n. U
is an open neighborhood of p, and cn is connected, thus cn lies completely in U.
27
Next, consider the point (0, 2-n+1), it is a point of cn and thus lies in U. Take an open disk
around the point, then it intersects all of xn for n greater than some N. Therefore, cn ⊂ U
for all n > N for some number N.
Since the whole set yn are the limit points of xn for n greater than N, yn ⊆ U for all n. Thus
cn ⊆ U for all n. Therefore, U = ∪ cn = X, and X is connected.
28
CHAPTER 5
----------------------------------------------------------------------------------------------------------------------------
CONCLUSION
----------------------------------------------------------------------------------------------------------------------------
So far, we have discussed three kind of connectedness, the usual connectedness, the Zconnectedness and the strongly connectedness, and the strongly connectedness finally
meets our purpose of finding a stronger notion of connectedness.
5.1 SUMMARY OF THE WORK
In this report, we first review the concept of connectedness. It is a well-developed
concept, and its definition, properties and examples are all ready to use. Thus, a quick
revision enables us doing further study.
By slightly modifying its definition, we gain a Z-connected space, which has almost the
same features as a connect space. The Z-connectedness may vary greatly, from the usual
connectedness to one-point connectedness, therefore, being a general Z-connected space,
it does not have anything very interesting.
However, a specific Z-connected space -- the strongly connected space is an ideal notion
of stronger connectedness. Since the space Z is carefully chosen, the strongly
connectedness is only a little stronger than the usual connectedness. We have shown that
the strongly connectedness not only has the same property as the Z-connected space, but
also has many new properties. Moreover, it is also mentioned in the report that how to
make a connected space strongly connected.
29
5.2 FURTHER SUGGESTIONS
The Z-connected space is an intermediate product of the project, but it has many
interesting properties. It might be worthwhile to continue the research, for example, we
can choose another space Z other than the one used in strongly connected spaces.
The other point to note is that the conditions for a connected space to be strongly
connected that presented in this report is still too strict, thus finding more suitable
conditions will be a challenge.
30
REFERENCE:
[1] Bing, R. H. (1953), “A connected countable Hausdorff space”, Proc, A.M.S.
[2] Duda, E. & Whyburn, G. (1978), “Dynamic Topology”, Undergraduate texts in
Mathematics, Springer_Berlag.
[3] Hocking, J. G. & Young, G. S. (1988), “ Topology”, Addison-Wesley Publishing
Company, Inc.
[4] Hu, S.T. (1966), “ Introduction to general topology”, Holden-Day inc.
[5] Kuratowski, K. (1948), “Topologie”, Vol 1, Warsaw.
[6] Munkers, J. R. (1975), “Topology, a first course”, Rrentice-Hall inc. New Jersey.
[7] Robert B, Ash. (1993), “Real variables with basic metric space topology”, New
York.
[8] Smullyan, R. M. (1969), “The continuum hypothesis”, the mathematical Sciences,
A Collection of Essays, The M.I.T. Press, Cambridge.
[9] Steen, L. A. (1970), “Counterexamples in Topology”, Holt, Rinehart & Winston
Inc, New York.
[10] Willard, S. (1970), “General Topology”, Addison-Wesley Publishing Company,
Inc.
31