Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Distributed firewall wikipedia , lookup
Passive optical network wikipedia , lookup
Recursive InterNetwork Architecture (RINA) wikipedia , lookup
Cracking of wireless networks wikipedia , lookup
Zero-configuration networking wikipedia , lookup
Computer network wikipedia , lookup
Piggybacking (Internet access) wikipedia , lookup
IEEE 802.1aq wikipedia , lookup
Network tap wikipedia , lookup
Routing in delay-tolerant networking wikipedia , lookup
IEEE ICC 2012 - Optical Networks and Systems
Optimal Dedicated Protection Approach to Shared
Risk Link Group Failures using Network Coding
∗ Dept.
Péter Babarczi∗, János Tapolcai∗, Pin-Han Ho† , Muriel Médard‡
of Telecommunications and Media Informatics, Budapest University of Technology and Economics, Hungary
† Dept. of Electrical and Computer Engineering, University of Waterloo, Canada
‡ Research Laboratory of Electronics, Massachusetts Institute of Technology, Cambridge, MA 02139 USA
Email: ∗ {babarczi,tapolcai}@tmit.bme.hu, † [email protected], ‡ [email protected]
Abstract—Survivable routing serves as a key role in
connection-oriented communication networks for achieving desired service availability for each connection. This is particularly
critical for the success of all-optical mesh networks where each
lightpath carries a huge amount of data. Currently, 1 + 1
dedicated path protection appears to be the most widely deployed
network resilience mechanism because it offers instantaneous
recovery from network failures. However, 1 + 1 protection
consumes almost twice as much capacity as required, which
imposes a stringent constraint on network resource utilization.
In addition, finding an SRLG-disjoint path is essential for
1 + 1 protection, which is nonetheless subject to non-trivial
computation complexity and may fail in some SRLG scenarios. To
address these problems, we introduce a novel framework of 1 + 1
protection, called Generalized Dedicated Protection (GDP), for
achieving instantaneous recovery from any SRLG failure event.
It is demonstrated, that finding a non-bifurcated optimal solution
for GDP is NP-complete. Thus, the paper presents a novel scheme
applying Generalized Dedicated Protection and Network Coding
(GDP-NC) to ensure both optimal resource utilization among
dedicated protection approaches and instantaneous recovery for
single unicast flows, which can be split into multiple parts in
all-optical networks. We demonstrate that the proposed GDP-NC
survivable routing problem is polynomial-time solvable, owing to
the ability to bifurcate flows. This flexibility comes at the expense
of additional hardware for linear combination operations for the
optical flows.
I. I NTRODUCTION
One of the most important targets of the Internet carriers is
to meet the service requirements defined in the Service Level
Agreement (SLA) with the subscribers in their backbones.
This is particularly critical in all-optical mesh wavelength
division multiplexed (WDM) networks where each lightpath
may carry a huge amount of data. It has been widely noted
that transferring a user’s data along a single active (or working)
lightpath might not be sufficient to fulfill the service availability requirements in the presence of various network outages
and unexpected failure events.
Dedicated protection (i.e. one-to-one relationship between
the backup resources and the working paths) is one of the
most commonly employed approaches for improving network
survivability, where multiple copies of the traffic flows are
launched in order to maintain high service availability in presence of unexpected network outages and failures. Previously
reported studies on dedicated protection have manipulated various assumptions on the node capability for the incoming and
978-1-4577-2053-6/12/$31.00 ©2012 IEEE
outgoing optical flows at each optical crossconnects (OXCs),
such as switching and merging, bifurcated/non-bifurcated, and
with/without network coding, i.e. nodal processing capability
for linear combination of signals, which lead to dedicated
segment protection, link protection [1], partial path protection [2] [3], generalized dedicated protection (GDP) [4], and
network coding based methods like 1 + N dedicated protection [5] or [6], etc.
We introduce a novel framework of dedicated protection,
called generalized dedicated protection with network coding
(GDP-NC), for instantenous recovery from any shared risk link
group (SRLG) failure event without any interruption or data
loss. GDP-NC is characterized as a generalized version of 1+1
protection where the amount of protection resources is optimal.
By employing network coding devices that can support linear
combination operations at each OXC, the proposed GDP-NC
framework can achieve superb capacity efficiency, extremely
high feasibility under various traffic scenarios, and various
topologies that could have failed most of the conventional
survivable routing schemes. We demonstrate that GDP with
non-bifurcated flows and without network coding is NPcomplete, thus, cannot be used in the on-line routing problem
of unicast connections surviving all considered SRLG failures.
However, we prove that an optimal GDP-NC problem can be
solved in polynomial-time when flow bifurcation is allowed.
Extensive simulation is conducted to verify the proposed GDPNC routing scheme and compare it with a number of previous
arts on dedicated protection providing instantenous recovery
from SRLG failures.
The rest of this paper is organized as follows. Section II
provides the related work to the study. In Section III, the
main contribution of the paper, presents the poliynomial-time
method GDP-NC. Section IV shows the simulation results in
various different SRLG scenarios. Finally, Section V presents
our conclusions and further research directions.
II. R ELATED W ORK
The idea of network coding was first introduced in [7] for
single-source multicast. It was shown that with NC the achievable multicast capacity equals the minimum of the maximal
unicast flows from the source to the receivers. Later, in [8] a
linear NC scheme for the same problem was introduced.
3051
Using NC for improving reliability and robustness was
introduced in multi-hop wireless networks [9]. The study [10]
contains an information-theoretic analysis of network management in order to improve network robustness. In [11] robust
codes for unicast connections against single link failures were
investigated, while in [12] robust network codes for multicast
were proposed. By assuming non-zero failure probabilities for
network links and a set F of failure patterns (or SRLGs),
[12] constructed an auxiliary graph Gf for each f ∈ F
that is obtained by deleting the corresponding failed links
(similarly to GDP SRLG graphs). Theorem 11 in [12] claims
that for a linear network G and a set of single-source multicast
connections C, there exists a common static network coding
solution to the network problems {Gf , C} for all f ∈ F . The
previous code is static (robust against network failures); i.e.
only the decoding matrix at the destination node needs to be
reconfigured in the presence of failures, while the intermediate
node configurations remain unchanged, while full receiving
rate is maintained.
In [13] random linear NC approach to solve multicast in
a distributed manner was proposed. As each node selects
coefficients over a sufficiently large Galois field randomly
computational complexity of this scheme is significantly lower
than its centralized counterpart. On the other hand, with the
application of random network codes the decodability can be
guaranteed only with high probability. It was shown in [13]
that, if a multicast connection is feasible under any link failure
f ∈ F , then random linear network coding achieves the
capacity for multicast connections, and is robust against any
link failures f ∈ F with high probability.
In [14] the robust multicast NC under the same failure
model as [12] was investigated. Theorem 11 of [14] states
that if the transmission rate does not reduce below a given
value k along any link in all the auxiliary graphs (Gf ), robust
linear network codes can be found in polynomial time.
NC has been positioned as a viable solution for improving
network throughput in various application scenarios. Application of NC in core optical networks has recently emerged [5],
[6], which in general aim to minimize the capacity consumption for a matrix of traffic demands. With shared M : N
protection, N working connections are protected by a common
pool of M protection paths, where the protection resources
are used only after a failure occurred in the network. Such
a concept was generalized to 1 + N protection by ensuring
the spare resources hot stand-by similarly to 1 + 1 protection,
provided with the capability of performing linear combination
operation on the input symbols of the N working paths at the
source OXC.
Although 1 + N protection has all the merits of dedicated
protection approaches while keeping the capacity consumption
low, it requires the topologies with 1 + N -connectivity, which
serves as a stringent constraint on its applicability. Note that
this constraint is not satisfied in most of current networks [15]
for N ≥ 3. In [6], a virtual layer is defined, in which network
coding is applied to protect F simultaneous failures along
the disjoint paths between the source and destination node.
Although the F failures in the virtual layer correspond to a
single failure event in the physical layer, the high connectivity
requirement of 1 + N protection is relaxed without impairing
the capacity efficiency.
In opaque optical networks, NC operations can be performed at each intermediate node in the electronic domain via
electronic buffering and processing. As NC requires additional
hardware, in [16] an evolutionary approach for NC was
developed, where coding is performed at as few nodes as
possible. The work in [17] investigated NC in WDM optical networks where Optical-to-Electronic-to-Optical (O/E/O)
equipment is required for wavelength conversion. A method
for minimizing the number of wavelengths which have to
be coded or converted was introduced. In [18], dedicated
protection of multicast trees was investigated, and various
architectures for all-optical circuits capable of performing the
operations required for network coding were introduced.
A. Our Contribution
Many works are concerned with survivable multicast connections against SRLG failures [12], or with protecting unicast
flows against single link failures [11], or with a traffic matrix
given in advance to which inter-session coding [5], [6] is
applied. To the best of our knowledge, this is the first work assuming on-line routing and protection of unicast flows against
all SRLG failures assuming intra-session coding in all-optical
networks. As various robust codes against SRLG failures exist
in the literature for other application environments [13] [14],
our goal is to demostrate their applicability in our GDP-NC
framework to obtain a dedicated protection scheme with optimal resource allocation and instantenous recovery. We assume
that all-optical devices for network coding are present at each
OXC [18]. To provide instantenous recovery, the protection
paths are calculated and signaled in advance, similarly to 1+1
protection. In order to exploit the benefits of network coding,
we assume that the flow of the unicast connections can be split
into multiple subflows.
III. G ENERALIZED D EDICATED P ROTECTION WITH
N ETWORK C ODING
A. Problem Formulation
Each connection is routed promptly after the request arrives
in the ingress network entity at time t at which the actual
topology is denoted by G = (V, E). On each undirected edge
e ∈ E a non-negative cost function (c : E → R+ ) is defined,
and the free capacity (k : E → R+ ) is given. A traffic demand
D = (s, d, b) contains the source s and destination node d,
and the bandwidth requirement (b ∈ N). Finally, the set of
failure patterns (or SRLGs), denoted as F , is given. For each
SRLG, a failure subgraph is created: ∀f ∈ F : Gf = (V, Ef ),
where Ef is obtained by removing the edges in f from E.
We assume that each SRLG in F is protectable, i.e. each Gf
is s − d connected.
Let I = {G, D, F } denote an instance of the proposed GDP
problem. Let the set XI contain a set of feasible solutions
yI = {H, R} for the problem instance I. Each solution is
3052
actually a subgraph H = (V, E), where the capacity along
each edge is set to ∀e ∈ E : be , which is the flow value in
the solution. The maximum flow from s to d is at least b in
H = (V, E) and in all Hf = (V, Ef ), where Ef is obtained
by removing the failed edges in f from H. The other part
of a GDP solution is the configuration map R, which gives
the cross-connections in the switching matrix and grooming
settings of the OXCs in H.
In a feasible solution yI ∈ XI the connection is operating
on b bandwidth in the failure-less state of the network, and it
is resilient against all failures f ∈ F defined by the network
operator. Furthermore, each OXC is configured accordingly to
the solution at connection setup (switching matrix, merging
signals, etc.) and this configuration is robust against all
failures in f ∈ F ; i.e. it remains unchanged even after
a failure occurred. We are rather interested in resilient and
robust solutions because it offers instantaneous recovery from
network failures as 1 + 1 protection. Note that a resilient nonbifurcated dedicated solution is always robust.
Each feasible solution yI ∈ XI is assigned with a cost
g(yI ) corresponding to the reserved bandwidth in the network
as follows:
be
(1)
ce · ,
g(yI ) =
b
∀e∈E
where be ≤ ke is the bandwidth used along link e by the
connection.
B. Non-bifurcated GDP is NP-complete
In the following, we show that to find an optimal GDP
solution in terms of Eq. (1) assuming non-bifurcated flows
is NP-complete, which motivates the need of a polynomialtime approach and the usage of network coding in survivable
routing. In order to show the NP-completeness of the nonbifurcated GDP, we show a transformation to the Steiner Forest
problem, which is proved to be NP-hard [19]. As the edges
with insufficient free capacity (ke < b) can be removed form
G = (V, E) when non-bifurcated flows are considered, it is
enough to investigate the instances with D = (s, d, 1), as all
edge capacities can be scaled accordingly to get such an input.
Theorem 1: To decide whether a solution with ≤ k cost
exists for the non-bifurcated GDP problem with traffic demand
D = (s, d, 1) in undirected graphs is NP-complete.
Proof: The non-bifurcated GDP problem is in NP, a
solution with ≤ k cost is a proof.
Assume we are given an instance of the Steiner Forest
problem, that is, an undirected graph G = (V, E), edge costs
c : E → R+ , and disjoint r subsets Si ⊆ V , is there a forest
F with ≤ k cost such that for all i and u, v ∈ Si , there exists
a path connecting u to v in F . In this proof, the definition
of Steiner Forest problem is used, in which each subset Si
contains only two elements Si = {si , ti } [19].
The polynomial time transformation is given as follows.
We add two new nodes s and t together with edges E + =
{(s, si ), (ti , t)}, i = 1, 2, . . . r with ∀e ∈ E + : ce = 0, all
other edges have the cost of the Steiner Forest problem. Unit
a
j1
a
a
b
b
j3
s
a+b
r1
j4
d
a+b
b
j2
b
a+b
a
r2
(a) In the final solution, both a and b reach the
destination node.
r1
j1
a
a
j3
s
b
a+b
j2
j4
d
a+b
b
b
a+b
a+b
a
r2
(b) The GDP solution is resilient and robust against all
failures in f ∈ F , e.g. after f = (j1 , r1 ) failed.
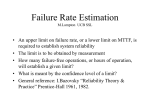
Fig. 1. A possible LP solution H = (V, E) ∈ XI for the instance I =
{G = (V, E), D = {s, d, 2}, F = {(j1 , r1 ), (j2 , r2 ), (j3 , j4 )}} containing
the butterfly graph with recievers r1 and r2 . On each link be = 1, the data
sent on each BU is denoted by a and b.
free capacities are assigned for all edges in the transformed
problem (∀e ∈ E : ke = 1), and the capacity request is b = 1.
We define |F | = r SRLGs, one for each source-target pair,
that is fj ∈ F : i = 1, 2, . . . , r, i = j : {(s, si ), (ti , t)}. The
problem instance is I = {G = (V, E∪E + ), D = {s, t, 1}, F }.
As the two problem has the same cost, a solution exists with
≤ k cost in Steiner Forest connecting all si and ti if and only
if a solution with ≤ k cost exists for the non-bifurcated GDP
problem between s and d. Thus, the non-bifurcated GDP is
NP-complete.
C. Bifurcated GDP with NC is polynomial
In order to obtain an applicable optimal method for online routing, bifurcated flows have to be considered in the
GDP problem. However, splitting the flows at network nodes
indroduces additional questions. Thus, the process of network
coding under the proposed GDP-NC scheme is divided into
the following two subproblems:
1) SB-I: find an optimal subgraph H = (V, E) which is
resilient against all failures in F and will be utilized in
network coding,
2) SB-II: find the algebraic operations R which the nodes
must perform to realize a robust code on H = (V, E).
D. Linear Program (LP) for SB-I
In the following a linear program (LP) is presented for SBI where the subgraph H = (V, E) is found in polynomialtime. Note that in [20] a linear programming formulation
was shown for multicast demands. However, because of the
different available link sets in Gf = (V, Ef ) it is not directly
applicable for GDP. Our goal is to obtain a solution x ∈ XI
which minimizes the cost g(x) in Eq. (1). The following
3053
450
∀(i,j)∈Ef
⎧
⎨ −b ,
b ,
=
⎩
0 ,
∀(j,i)∈Ef
if i = s
if i = d
,
otherwise
(3)
∀f ∈ F , ∀e ∈ E: be,f ≤ be .
(4)
400
avg capacity
(2)
∀f ∈ F , ∀e ∈ E: 0 ≤ be,f ≤ min {b, ke },
∀f ∈ F , ∀i ∈ V :
b(i,j),f −
b(j,i),f
800
1+1
DH
ILP
NC
350
300
250
200
25
#nodes
(a) Maximal planar graphs
In this section we discuss the applicability of polynomialtime algorithms previously proposed to get robust multicast
network codes for the unicast connections of GDP-NC in
order to realize the robust algebraic operations R for the LP
solution H = (V, E). In this case, the same process required
at the GDP-NC network nodes as in [13] and [14]. The
network coding operations of an example solution H = (V, E)
is shown in Fig. 1, where the well-known butterfly graph
for demonstrating network coding is extended for protection
purposes. Similarly to [12], we assume that zeros received
along the failed links after an SRLG failure occurs. Thus,
for SB-II, the results in [12] provide us the opportunity to
find robust network codes in polynomial time for a resilient
500
400
200
5
E. Finding Robust Network Codes (SB-II) for the LP Solution
600
300
150
100
Note that in the above formulation each undirected edge is
replaced by two anti-parallel arcs. The solution H = (V, E)
of the LP above can minimize the consumed bandwidth while
being resilient against all possible SRLG failures in F , as b
units of optical flow eventually reach the destination in each
auxiliary SRLG graph. In addition to the topology, we further
need to obtain a robust configuration map R.
We will show that if the LP solution contains 0 < be < b for
any edge e ∈ E (i.e. the solution is bifurcated), the existence
of a feasible configuration map R is only guaranteed if the network nodes are able to combine linearly the incoming signals,
as shown in Section III-E. On the other hand, if the OXCs
are unable to combine the incoming signals, it is possible
/ XI for any configuration map RH . An
that x = {H, RH } ∈
example for the above statement is given as follows. Let us
consider H = (V, E) obtained in Fig. 1(a) which is resilient
against the SRLG failures F = {(j1 , r1 ), (j2 , r2 ), (j3 , j4 )}.
One can easily check that the presented configuration R is
robust against all failures, and only the decoding matrix at
the destination node need to be updated upon failures, i.e.
x = {H, R} ∈ XI . However, if network coding is not
allowed, we have to configure a or b instead of a ⊕ b on
the corresponding edges, without loss of generality b. In this
case, after SRLG (j1 , r1 ) failure occurs as shown in Fig. 1(b),
there exists an s − d cut in the network for the a part of the
data. It is not possible to recover the data at the destination
node without reconfiguration of node j3 and signaling in the
control plane. Thus, such a GDP solution is resilient but not
robust against some failures, i.e. x = {H, RH } ∈
/ XI for any
configuration map RH .
1+1
DH
ILP
NC
700
avg capacity
constraints are required:
40
5
25
#nodes
40
(b) Sparse networks
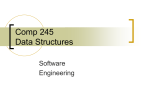
Fig. 2. Average capacity in maximal planar graphs (mean node degree is
around 5) and in sparse networks (mean node degree is around 2.2).
bifurcated solution. Either random network codes proposed
in [13] or network codes presented in [14] can be used.
However, here is only the latter is shown.
As H = (V, E) found in SB-I is resilient against all failures
in F , it satisfies the requirements of Theorem 11 in [14] for the
set of connections C = {(s, d)}, which ensures that none of the
SRLG failures could possibly reduce the bandwidth below k =
b. As a corollary, it is possible to get robust network codes with
the method proposed in [14] to obtain robust multicast codes
for a resilient and generalized dedicated protection solution in
polynomial time. Thus, in the presence of any failure, only
the destination node needs to use different decoding matrix to
get the data back, as shown in Fig. 1(b).
IV. S IMULATION RESULTS
We conducted experiments on networks with various sizes
to verify the proposed network coding based algorithm and
compare it with previously reported counterparts. For the sake
of simplicity, each edge in the topologies has a uniform
cost and 16 wavelengths per direction per link, and each
wavelength has a capacity of OC-192 by following the settings
of SONET [21]. Capacity demands of the connections are
uniformly distributed between 1 and 96, where a unit is for
a single STS-1 carrier supporting a 50 Mbps request, and 96
units are for 96 virtually concatenated frames corresponding
to a 5 Gbps request. With the proposed network coding
approach, all-optical coding devices [18], OC-1 grooming and
full wavelength conversion capability are assumed at each
node. The connection requests arrive following a Poisson
process with an interarrival mean time of 5 time units. The
data was obtained by averaging the results of 5 different
traffic patterns each containing 1000 traffic demands between
randomly chosen source and destination nodes.
We compare the proposed GDP-NC scheme (denoted as
”NC” in the figures) with the following three dynamic routing
schemes: (1) 1 + 1, (2) the optimal non-bifurcated GDP
solution (denoted as ILP), and (3) the heuristic approach based
on Dijkstra’s algorithm (Dijkstra Heuristic, denoted as DH)
for non-bifurcated connections [4]. A two-step approach is
employed to find SRLG-disjoint path pair for 1 + 1 protection:
3054
blocking probability
0.25
coding. Case studies were conducted to examine the proposed
GDP-NC solution under various scenarios. Compared with
the other schemes, the proposed GDP-NC can provide greatly
reduced blocking probability.
1+1
DH
ILP
NC
0.2
0.15
0.1
ACKNOWLEDGEMENTS
The results discussed above are partially supported by the
grant TÁMOP - 4.2.2.B-10/1–2010-0009. Péter Babarczi was
supported by the Sándor Csibi research grant.
0.05
0
40
120
Load (in Erlangs)
220
R EFERENCES
Fig. 3. Blocking probability in the COST266 network [15] (37 nodes, 57
links, mean node degree 3.08, all demands have 64 bandwidth).
firstly, the shortest path is derived using Dijkstra’s as the
working path, and the second step implements Dijkstra’s again
on the residual graph by removing all the SRLGs traversed by
the working path.
A connection request is admitted iff it is resilient and robust
against all the failures in F . This leads to a fact that the
non-bifurcated GDP approaches and GDP-NC always provide
feasible solutions when the links have sufficient free capacity.
However, when multi-link SRLGs are considered, 1 + 1 fails
to provide a feasible solution owing to the lack of an SRLGdisjoint pair of paths. To keep the blocking of 1 + 1 in a
comparable range with the other schemes, the SRLG list in
the simulations contains all single link failures and 10% of
adjacent dual-link failures.
As shown in Fig. 2, GDP-NC provides the optimal resource
consumption among all the dedicated protection approaches,
while all failures in F are protected and instantaneous recovery is ensured. In comparison with the NP-complete nonbifurcated GDP, the polynomial-time GDP-NC can achieve
significant reduction in running time as well. Furthermore,
1 + 1 is outperformed by the optimal GDP-NC scheme for
about 20% bandwidth consumption in dense networks.
In Fig. 3, GDP-NC yields better performance in terms of
blocking probability than its counterparts. It is clearly observed
that GDP-NC outperforms all the other schemes in all the
scenarios, and the saving in blocking probability is about 10%
in comparison with 1 + 1 protection. Owing to the fact that
GDP-NC can achieve the best flexibility by using the network
coding functions, the blocking probability can be kept on a
tolerable level even under extreme traffic conditions.
V. C ONCLUSIONS
The paper introduces a novel dedicated protection scheme
for all-optical mesh networks, called generalized dedicated
protection with network coding (GDP-NC), for dynamically
routing unicast requests. GDP-NC generalizes all the reported
dedicated protection schemes and routing architectures, while
further being incorporated with NC functionality at each node.
We presented a linear program for the formulated GDP-NC
problem which provides optimal bandwidth allocation for dedicated protection, and showed that the LP solution can always
be routed in the network with the application of network
[1] A. Fumagalli and L. Valcarenghi, “IP restoration vs. WDM protection:
is there an optimal choice?” IEEE Netw., vol. 14, no. 6, pp. 34–41, 2000.
[2] H. Wang, E. Modiano, and M. Médard, “Partial path protection for
WDM networks: End-to-end recovery using local failure information,”
in Proceedings ISCC, IEEE, 2002, pp. 719–725.
[3] G. Xue, W. Zhang, T. Wang, and K. Thulasiraman, “On the partial
path protection scheme for WDM optical networks and polynomial time
computability of primary and secondary paths,” MANAGEMENT, vol. 3,
no. 4, pp. 625–643, 2007.
[4] P. Babarczi, J. Tapolcai, and P. Ho, “Availability-constrained Dedicated
Segment Protection in circuit switched mesh networks,” in Workshop on
Reliable Networks Design and Modeling (RNDM), 2009, pp. 1–6.
[5] A. Kamal, “1+ N network protection for mesh networks: network
coding-based protection using p-cycles,” IEEE/ACM Transactions on
Networking, vol. 18, no. 1, pp. 67–80, 2010.
[6] I. Barla, F. Rambach, D. Schupke, and G. Carle, “Efficient Protection
in Single-Domain Networks using Network Coding,” in Proc. GLOBECOM, IEEE, 2010, pp. 1–6.
[7] R. Ahlswede, N. Cai, S. Li, and R. Yeung, “Network information flow,”
IEEE Transactions on Inf. Theory, vol. 46, no. 4, pp. 1204–1216, 2000.
[8] S. Li, R. Yeung, and N. Cai, “Linear network coding,” IEEE Transactions on Information Theory, vol. 49, no. 2, pp. 371–381, 2003.
[9] O. Al-Kofahi, “Network coding-based survivability techniques for multihop wireless networks,” Ph.D. dissertation, Iowa State University, 2009.
[10] T. Ho, M. Médard, and R. Koetter, “An information-theoretic view
of network management,” IEEE Transactions on Information Theory,
vol. 51, no. 4, pp. 1295–1312, 2005.
[11] S. Rouayheb, A. Sprintson, and C. Georghiades, “Robust network codes
for unicast connections: A case study,” IEEE/ACM Transactions on
Networking, vol. 19, no. 3, pp. 644–656, 2011.
[12] R. Koetter and M. Médard, “An algebraic approach to network coding,”
IEEE/ACM Trans. on Networking, vol. 11, no. 5, pp. 782–795, 2003.
[13] T. Ho, M. Médard, R. Koetter, D. Karger, M. Effros, J. Shi, and
B. Leong, “A random linear network coding approach to multicast,”
IEEE Trans. on Inf. Theory, vol. 52, no. 10, pp. 4413–4430, 2006.
[14] S. Jaggi, P. Sanders, P. Chou, M. Effros, S. Egner, K. Jain, and
L. Tolhuizen, “Polynomial time algorithms for multicast network code
construction,” IEEE Trans. on Inf. Theory, vol. 51, no. 6, pp. 1973–1982,
2005.
[15] S. Maesschalck, D. Colle, I. Lievens, M. Pickavet, P. Demeester,
C. Mauz, M. Jaeger, R. Inkret, B. Mikac, and J. Derkacz, “Pan-European
optical transport networks: an availability-based comparison,” Photonic
Network Communications, vol. 5, no. 3, pp. 203–225, 2003.
[16] M. Kim, “Evolutionary approaches toward practical network coding,”
Ph.D. dissertation, Massachusetts Institute of Technology, 2008.
[17] R. Thinniyam, M. Kim, M. Medard, and U. O’Reilly, “Network coding
in optical networks with O/E/O based wavelength conversion,” in Optical
Fiber Communication (OFC/NFOEC). IEEE, 2010, pp. 1–3.
[18] E. Manley, J. Deogun, L. Xu, and D. Alexander, “Network Coding for
WDM All-Optical Multicast,” CSE Technical reports, p. 10, 2009.
[19] J. Konemann, S. Leonardi, G. Schafer, and S. van Zwam, “From primaldual to cost shares and back: a stronger LP relaxation for the Steiner
forest problem,” Automata, languages & program., pp. 930–942, 2005.
[20] D. Lun, N. Ratnakar, M. Médard, R. Koetter, D. Karger, T. Ho,
E. Ahmed, and F. Zhao, “Minimum-cost multicast over coded packet
networks,” IEEE/ACM Trans. on Networking, vol. 14, no. SI, pp. 2608–
2623, 2006.
[21] S. Huang, C. Martel, and B. Mukherjee, “Survivable multipath provisioning with differential delay constraint in telecom mesh networks,”
IEEE/ACM Trans. on Networking, vol. 19, no. 3, pp. 644–656, 2011.
3055