Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
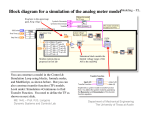
Modeling Transfer function form of the model θn 2 n Kθ / vω Gθ / v ( s) = = 2 2 vin s + 2ζωn s + ωn The following slides detail a derivation of this analog meter model both as state space model and transfer function (TF) as shown above. Why use the TF model? The static experiments provide a measure of the static gain, so only two more parameters are needed – 3 total. Also, the step response looks like a classic 2nd order system response. The state space model needs 5 parameters, so it is not as convenient to use in this control study. TF model only needs damping ratio and natural frequency, which can be readily determined in the laboratory. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin Analog moving coil meter model Modeling • The meter physical model is presented in two different versions: ‘full model’ and 2nd order. • The 2nd order model neglects inductance, which is a good assumption for this application. • The electromechanical (EM) torque can be modeled using a gyrator. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin Recall the models shown before in schematic form: Electrical circuit model Vin Modeling im Meter movement Rotational system needle ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin Modeling The EM torque induced on the moving coil is related to the current – a gyrator model This slide summarizes the basic force-current relation in a conductor. In a bond graph, this can be modeled by a gyrator, which gives a net relation between force and current. For a motor or for the case of the rotational moving coil, this force is resolved into torque. We find this Permanent magnet supplies the B-field current flow direction F N B-field + modulation as: r = Bl sin α − copper rod v B qV i F=qV×B F = r ⋅i v = r ⋅V V ≡ xɺ F G • x S The differential force on a differential element of charge, dq, is given by: where B is the magnetic field density, and i the current (moving charge). dF = dqv × B It can be shown that the net effect of all charges in the conductor allow us to write: where dl is an elemental length. dF = idl × B For a straight conductor of length l in a uniform magnetic field, you can integrate to find the total force: F = il × B With angle α between the vectors, you can arrive at the desired relation: ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab F = ( Bl sin α ) ⋅ i gyrator modulus Department of Mechanical Engineering The University of Texas at Austin Modeling Analog moving coil meter bond graph A bond graph of the meter can take the form shown below. The coil has resistance, Rm, and inductance, Lm. The needle has moment of inertia, Jn, and there is some damping, Bn, as well. The spring has stiffness, Ks. These are parameters for linear constitutive relations for each of the elements shown in this model. Note, the meter also has an external series resistor that is not shown here, but the value of that resistance can be added to Rm. We seek a mathematical model that relates needle position (equal to spring deflection) to input voltage, vin. This model can be derived from the bond graph, or by application of Newton’s Laws (mechanical side) and KVL (circuit side). ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Electrical circuit model EM conversion I : Jm I : Lm λɺm im E vin iin vR rm vm 1 Rotational system i i G im iR hɺn ω n Tm Ts θɺ 1 ωm C : K s−1 s TB ωB R : Bn R : RT RT = Rm + Rs coil + series See Appendix B for explanation of gyrator model for EM transduction. Department of Mechanical Engineering The University of Texas at Austin Full 3rd Modeling order model, with inductance The state-space model for the meter, including the inductance, is 3rd order. hn = J nω n = needle angular momentum 3 States: λ m = Lmim = flux linkage θ = angular position of needle/spring n ɺ = J ωɺ = T − K θ − Bω im = λm Lm h n n n m s n n 3 ɺ State λ m = Lm ( dim dt ) = vin − (Rm + Rs )im − vin equations: ɺ =ω θ n n Note: the needle and the spring have the same velocity. EM gyrator Tm = rm im relations: v = r ω Also, can choose either the m m m meter flux linkage or current as the state. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin 3rd order model state-space equations Modeling R r − T − m 0 Jn λɺ Lm λ m 1 m r Bn m h + 0 v ɺ = − − K h State equations: s in n n J J n n ɺ 0 θn θ n 1 0 B 0 Jn A Output equation: λ m y = θ n = 0 0 1 hn + 0 vin C θ n D In state space form: ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin Modeling Analog moving coil meter bond graph – neglect inductance If we neglect the inductance, we see that the model reduces to second order. Note the change in causality (if you understand bond graphs). This assumption is reasonable given that we observe a step response in the experiments that looks 2nd order, underdamped. Now the only states of interest are the needle angle (related to spring deflection) and the needle rotational momentum. I : Jm I : Lc λɺm im E vin vm 1 iin vR rm i i G im iR hɺn ω n Tm Ts θɺ 1 ωm C : K s−1 s TB ωB R : Bn R : RT RT = Rm + Rs coil + series ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab See Appendix B for explanation of gyrator model for EM transduction. Department of Mechanical Engineering The University of Texas at Austin 2nd order model, neglecting inductance Modeling The mathematical model for the meter, neglecting inductance, hn = J nω n = angular momentum States: θ n = angular position of needle/spring hɺn = Tm − K sθ n − Bnω n State equations: θɺ = ω n n Tm = rm im EM gyrator relations: vm = rmω m where, iin = iR ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab v ( = in − vm ) (Rm + Rs ) The meter current is now determined by the voltage drop, not by the inductor state. Department of Mechanical Engineering The University of Texas at Austin 2nd Modeling order state-space equations In state space form: State equations: rm2 1 hɺ − Bn + R J − K s h n T n n = ɺ θn θn 1 0 Jn A h n Output equation: y = θ n = 0 1 θ n C ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab rm + R vin T 0 B + 0 vin D Department of Mechanical Engineering The University of Texas at Austin Let’s convert this into a 2nd order ODE equation Modeling First, consider just the first equation and write it in terms of the angle: hn = J nω n = J nθɺn ⇒ hɺn = J nθɺɺn Substitute into the momentum equation: 2 1 r rm m ɺɺ ɺ ⇒ J nθ n + Bn + J nθ n + K sθ n = vin RT J n RT Remember that the angle and angular velocity are related, so write in terms of the angle. This gives the 2nd order ODE we want: 2 1 Ks K s rm r r m m ⇒ θɺɺn + Bn + θɺn + θ n = vin = vin RT J n J n RT Jn J n K s RT ω n2 ω n2 u(t) 2ζω n ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin Modeling Relate to the static gain measured in lab 2 1 Ks K s rm r m θɺɺn + Bn + θɺn + θ n = vin RT J n Jn J n K s RT ω n2 ω n2 u(t) 2ζω n For a constant input voltage, the steady-state angle (equilibrium) is found by making the derivative terms zero, Recall: r2 1 K K r θɺɺn + Bn + =0 ⇒ θ nss m θɺn + RT J n =0 rm = K s RT s Jn θ nss = vin = Kθ /v vin s m J n K s RT vin 90 ⋅ deg θ = ⋅ vin 15 ⋅ V static gain model So, if you want a certain angle, you simply apply, vin = K v /θ θ desired Works well if parameters are known, remain constant, and dynamic effects are not significant. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin Now write in transfer function form Start in the standard form: θɺɺn + 2ζω nθɺn + ω n2θ n = ω n2u(t) Modeling u(t) = Kθ /v vin Transform to s-domain, and solve for angle-to-voltage relation: Kθ / vωn2 = 2 vin s + 2ζωn s + ωn2 θn You can see this model returns the static gain relation when you make s go to zero (i.e., steady-state). So, all we need is the damping ratio and the natural frequency to parameterize this dynamic model. These can be found either from the physical parameters or by experimentally determining the values in the lab. We’ll do the latter. ME 144L – Prof. R.G. Longoria Dynamic Systems and Controls Lab Department of Mechanical Engineering The University of Texas at Austin