Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
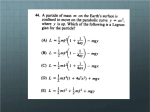
Physics 430: Lecture 18 Two-Body Central Force Problems Dale E. Gary NJIT Physics Department 8.1 Central Force Problem We have already met the central force problem in both electrostatics and gravitation. A key point that governs the behavior is that there is no transverse force, hence angular momentum is conserved. This is only strictly true for two-body problems, and for spherically symmetric masses or charges. As soon as a third body is added that is not on a line between the first two, a transverse force appears. And even bodies as nearly spherical as the Earth and the Moon nevertheless exert tidal forces that cause an exchange of momentum. But well-separated planets and stars interact to an excellent approximation through two-body central forces, as do a proton and electron (the hydrogen atom) or diatomic molecules. Even when quantum effects are important, those effects are described in language borrowed from the two-body central force problem, so this is an important problem to study. For definiteness, we will restrict ourselves to the gravitation problem, but keep in mind that these ideas apply directly to any central force problem. November 3, 2009 The Gravitation 2-Body Problem We have two gravitating bodies of mass m1 and m2, at positions r1 and r2. The potential energy is Gm1m2 U (r1 , r2 ) - r1 - r2 . A key point is that this depends only on the separation between the masses, not on r1 and r2 separately. Thus, the system is translationally invariant. In addition, as we saw in chapter 4, if a conservative force is central, then U is independent of the direction of (r1 - r2) as well. It depends only on the magnitude r1 - r2 : U (r1 , r2 ) U ( r1 - r2 ). To make things simpler, we introduce a new variable, r = r1 - r2 , which is the position of body 1 relative to body 2. U depends only on the magnitude of r, i.e. U U (r ). In terms of Lagrangian mechanics, we have for the two-body problem: L T - U 12 m1r12 12 m2r22 - U (r ). November 3, 2009 8.2 CM, Relative Coordinates, and Reduced Mass 1 You should already be familiar with finding the center of mass R M For two masses, it is trivial: R mr . m1r1 m2r2 m1r1 m2r2 . m1 m2 M i i i As we saw in Chapter 3, the CM is along the line joining the two masses, and the distances of the masses from the CM is in the ratio m1/m2. If m2 » m1, for example, then the CM is very close to body 2. Recall also from section 3.3 that the total momentum of two bodies is the same as if the total mass were concentrated at the CM location and following the motion of the CM: P MR. Your first homework problem (Prob. 8.1) will ask you to show that r1 and r2 , in terms of CM R and relative position r, are m m Notice the symmetry, r1 R 2 r and r2 R - 1 r. but with a change in sign M M Putting these into the kinetic energy 2 2 m m T 12 m1r12 12 m2r22 12 m1 R 2 r 12 m2 R - 1 r . M M November 3, 2009 Reduced Mass Multiplying the squares, we find that the cross terms cancel and we are left with the simple result: T 12 MR 2 12 mr 2 . where I have used the symbol m for the reduced mass: mm m 1 2 . m1 m2 This is an important quantity that you will see again, so you should get used to it. Another way to write it is: Note, m is less than the 1 1 1 . smaller of m1 and m2. m m m 1 2 It has the dimensions of mass, and ranges from m1 when m2 , to m2 when m1 , and is m/2 when m = m1 = m2. Thus, it tends toward the lower of the two masses. The reduced mass of the Sun-Earth system is almost exactly the mass of the Earth. CM and relative coords Returning to the Lagrangian, we now find: make good generalized L T - U 12 MR 2 12 mr 2 - U (r ) coords, and split the problem LCM Lrel . into two parts. November 3, 2009 8.3 The Equations of Motion With the Lagrangian L T - U 12 MR 2 12 mr 2 - U (r ) , we can now write down the equations of motion. The CM equation is trivial: MR 0 or R = const. This should be no surprise, because recall that our 2-body problem is an isolated system, hence no outside forces are acting (Newton’s 1st Law). In the language of our previous lecture, the CM coordinate is ignorable. Another way of looking at it is that the Lagrangian does not depend on R, which expresses a conservation law (conservation of momentum). The Lagrange equation for the other coordinate, the relative position r, gives the separate equation of motion: mr -U (r ), which we should pause to think about. This is the equation of motion for a single free particle of mass m (reduced mass) subject to potential energy U(r). In the case of two stars, for example, neither one orbits the other, but rather they orbit their common center of mass. Nevertheless, we can treat the problem AS IF a single star of reduced mass m were orbiting at a distance r = |r1 - r2| from the other, fixed (unmoving) star. And note that EITHER star can be the fixed one, not just the more massive one. November 3, 2009 The CM Reference Frame Since we have seen that the velocity of the CM is constant, we can change to a frame moving with this constant velocity so that, in this alternate inertial frame, R = 0. 2 1 In the CM frame, the Lagrangian is just L 2 m r - U ( r ) and the problem is reduced to a one-body problem. It is important to understand this pseudosingle body system. The “single body” is of reduced mass m, and m1 r O 1 r2 CM r1 m2 r = |r1- r2| m r2 O Arbitrary Origin atorigin CM Path relative to CM Equivalent one-dimensional problem the center of its orbit is the other body NOT the CM. This is true even though the choice of origin that led to the above Lagrangian is the CM. Note, as m1 , m2 m and this becomes more accurate. November 3, 2009 Conservation of Momentum In the Lagrangian L 12 mr 2 - U (r ), the r term has to be evaluated in polar coordinates. Recall that d ˆ r dt Thus, the Lagrangian becomes rrˆ rrˆ rff . L 12 m r 2 r 2f 2 - U (r ), which is independent of f, from which you can immediately see that angular momentum is conserved: L m r 2f const l. (angular momentum) f This is for our pseudo-one-body problem, so let’s see if this holds up when we look at the two-body problem with origin at the CM. The total angular momentum for the two bodies is L r1 p1 r2 p2 m1r1 r1 m2r2 r2 . But recall You will find upon substitution that L r mr, which is that for one body. r1 R m2 m r 2r M M and r2 R - m1 m r - 1 r. M M November 3, 2009 The Two Equations of Motion f m r f const l. (angular momentum) The radial equation, in turn, is L m rf 2 - dU m r . r dr Notice that this equation depends on f, so the two equations are coupled, but in the nicest possible way since we can simply replace l 2 l dU l dU . 2 3 dr m r dr m r and find m r m r We just saw that the f equation for the Lagrangian L 12 m r 2 r 2f 2 - U (r ), L is 2 f 2 mr 2 Notice that this depends only on r, and leads us to think about an even simpler, one-dimensional problem. Notice that the above equation is a force equation, so each term is a force. The first term on the right can be identified as the “centrifugal force” Fcf. There is nothing to stop us, mathematically, from writing this as the (1-d) gradient of a potential energy: l2 d Fcf -U cf 3 - U cf mr dr l2 U cf . 2m r 2 November 3, 2009 8.4 The Equiv. 1-D Problem Writing this term as the gradient of a potential, the equation of motion becomes mr - dU dU cf d d - U (r ) U cf (r ) - U eff (r ), dr dr dr dr where Ueff is the effective potential energy, i.e. the sum of the actual potential energy U(r) and the centrifugal potential energy Ucf(r): U eff As written, this is actually a correct equation for any two-body central force problem. For the specific case of a gravitational potential energy, we have U eff l2 U (r ) . 2 2m r Gm1m2 l2 . r 2m r 2 Notice that one term of this is negative, while the other is positive. A schematic plot is shown a right, which you may recognize from Chapter 4 (and the exam!). U ~ l2/r2 r Ueff ~ -1/r November 3, 2009 The Equivalent 1-D Problem-2 All of the things we learned in Chapter 4 about this kind of potential energy curve applies here as well, although there are “nuances.” rmin U rmax r m ~ l2/r2 rmin E>0 As before, if the total energy is less than zero then the object (planet, star, comet…) has two E<0 rmin turning points, rmin and rmax. However, the actual rmax motion is not purely radial, but rather the object ~ -1/r is moving in an ellipse. The “force” that turns the object at the inner point is the irreducible angular momentum of the object. The object can get no closer to the central star than rmin, because to do so would require losing some angular momentum. How would you interpret the equilibrium (the minimum point in the Ueff curve)? November 3, 2009 r Conservation of Energy Going back to the radial equation of motion: mr d U eff (r ), dr U Multiplying both sides by dr/dt, this can be written ~ l2/r2 rmin E>0 d 1 2 dr d d m rr m r U ( r ) U eff (r ), eff dt 2 dt dr dt or, 12 m r 2 U eff (r ) const. r rmin This is just an expression of conservation of energy, but notice that this says the radial kinetic energy plus the effective potential energy is a constant (in fact it is just E). We can see that the effective potential energy is made of the true potential energy and the angular kinetic energy! 1 2 E<0 rmax ~ -1/r m r 2 U eff (r ) 12 m r 2 12 m r 2f 2 U (r ) E. One last point—we developed this for an inverse square law, in which case finite orbits, which we will see are ellipses, close on themselves. However, for some other force law the orbit does not close. November 3, 2009 Equation of the Orbit The radial equation of motion provides the position r and a function of t, but if we want the equation of the orbit we need r as a function of f. We start with the equation of motion in terms of forces, and transform it using a couple of (quite non-obvious) tricks: l2 m r F (r ) mr 3 . The first trick is to change variables from r to u = 1/r. The second trick is to convert the differential operator d/dt in terms of d/df: d df d d l d lu 2 d f 2 . dt dt df df m r d f m d f Hang on to your hats—let’s find out what r becomes: d lu 2 d 1 l du r (r ) dt m df u m df so d lu 2 d l du l 2u 2 d 2u r (r ) . - 2 2 dt m df m df m df Thus, the radial equation becomes l 2u 2 2u l 2u 3 -m 2 F (r ) 2 m f m or u(f ) -u (f ) - m F (r ). 2 2 l u (f ) November 3, 2009 Example 8.3: The Radial Equation for a Free Particle Before we get into the solution of this equation for the 2-body problem, which we’ll do next time, let’s look at its solution for a free particle. Clearly, for a free particle the force F(r) = 0, so we have: u(f ) -u (f ), which is the oscillation equation whose general solution is u (f ) A cos(f - d ), where A and d are arbitrary constants (and notice that w = 1). Remember that u = 1/r, so we’ll rename A = 1/ro. The above solution then becomes: r (f ) ro 1 . u (f ) cos(f - d ) Believe it or not, this is the polar coordinate equation for a straight line, as you can see in the plot at right. Here Q is the point of closest approach, where f d and therefore r = ro. At any other point, P, ro = r cos(f - d. P r f ro Q d November 3, 2009