Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
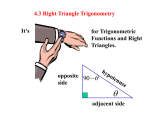
Chapter 7 Techniques of Integration 7.1 Integration by parts Question: How to integrate x ln xdx, x sin xdx, ex sin xdx , where the integrands are the product of two kinds of functions? Every differentiation rule has a corresponding integration rule: Differentiation Integration the Chain Rule the Substitution Rule the Product Rule the Rule for Integration by Parts The formula for integration by parts (1) udv uv vdu Let u = f (x) and v = g(x) are both differentiable, then du= f’(x) dx and dv= g’(x) dx (2) f ( x) g( x)dx f ( x) g ( x) f ( x) g ( x)dx Example 1. Find x cos xdx Example 2. Evaluate ln xdx Example 3. Find 2 x x e dx x e Example 4. Evaluate sin xdx The formula for definite integration by parts (3) b b a f ( x) g( x)dx f ( x) g ( x) a f ( x) g ( x)dx Example 5. Calculate 1 0 tan 1 xdx Example 6. Prove the reduction formula 1 n 1 n 1 n2 sin xdx cos x sin x sin xdx n n n where n2 is an integer. Summarize •When the integrands are the product of two kinds of functions and neither of them is derivative of the other, we use the integration by parts. We can compare: the integratio n by parts f ( x) g ( x)dx f ( x) g ( x) f ( x) g ( x)dx the substituti on rule f ( g ( x)) g ( x)dx f ( g ( x))dg ( x) f (t )dt •First we recognize u and v, then confirm udv to be more easily integrated than vdu . For example x ln xdx, x sin xdx, ex sin xdx 7.2 Trigonometric integrals Question 1: How to evaluate sin m x cos n xdx ? (a) If the power of cosine is odd ( n=2k+1 ). • Save one cosine factor to cos xdx d sin x • Use cos 2 x 1 sin 2 x to express the remaining factors in terms of sine: sin m 2 k 1 x cos xdx sin x(cos x) cos xdx m 2 k sin x(1 sin x) d sin x m •Then substitute u=sinx. 2 k (b) If the power of sine is odd ( m=2k+1 ). • Save one sine factor to sin xdx d cos x • Use sin 2 x 1 cos 2 x to express the remaining factors in terms of sine: 2 k 1 n 2 k n sin x cos xdx (sin x ) cos x sin xdx (1 cos2 x) k cosn xd cos x •Then substitute u=cosx. (c) If the powers of both sine and cosine are even, use the half-angle identities 1 sin x (1 cos2 x) 2 2 1 cos x (1 cos2 x) 2 2 It is sometimes helpful to use the identity sin x cos x 12 sin 2 x 5 2 sin x cos xdx Example 1. Evaluate Example 2. Evaluate 4 0 Example 3. Find sin 4 4 2 sin x cos xdx xdx Question 2: How to evaluate tan m x sec n xdx ? (a) If the power of secant is even ( n=2k). 2 2 sec x to sec xdx d tan x • Save a factor of • Use sec x 1 tan x to express the remaining factors in terms of tanx: 2 2 m 2k m 2 k 1 2 tan x sec xdx tan x (sec x ) sec xdx tan m x(1 tan 2 x) k 1 d tan x •Then substitute u=tanx. 6 4 Example 4. Find tan x sec xdx (b) If the power of tangent is odd ( m=2k+1). •Save a factor of sec x tan x to sec x tan xdx d sec x 2 2 tan x sec x 1 to express the remaining •Use factors in terms of secx: 2 k 1 n 2 k n 1 tan x sec xdx (tan x ) sec x sec x tan xdx (sec 2 x 1) k sec n 1 xd sec x •Then substitute u=secx. Example 5. Find 5 7 tan x sec xdx (c) If n = 0, only tanx occurs. Use tan x sec x 1 and, if necessary, the formula 2 2 tan xdx ln sec x C Example 6. Find tan 3 xdx (d) If n is odd and m is even, we express the integrand completely in term of secx. Power of secx may require integration by parts. Example 7. Find sec xdx Example 8. Find 3 sec xdx Question 3: How to evaluate sin mxcos nxdx ? sin mx cosnxdx , To evaluate the integrals (a) (b) sin mxsin nxdx, (c) cosmx cosnxdx use the corresponding identity: 1 sin( A B) sin( A B) 2 1 (b) sin A sin B cos(A B) cos(A B) 2 1 (c) cos A cos B cos(A B) cos(A B) 2 (a) sin A cos B Example 9. Evaluate sin 4 x cos5xdx 7.3 Trigonometric substitution •How to find the area of a circle or an ellipse? •How to integrate a 2 x2 dx, a2 x2 dx and x2 a 2 dx ? In general we can make a substitution of the form x=g(t) by using the Substitution Rule in reverse(called inverse substitution): Assume that g has an inverse function, that is, g is one-to-one, we obtain x g (t ) f ( x)dx t g 1 ( x ) 1 f ( g ( t )) g ( t ) dt F ( t ) F ( g ( x)) One kind of inverse substitution is trigonometric substitution. Table of trigonometric substitution Expression a2 x2 a2 x2 x2 a2 Substitution 2 2 x a tan , 2 2 x a sec , 0 or 2 3 2 x a sin , Identity 1 sin 2 cos2 1 tan 2 sec2 sec2 1 tan 2 Example 1. Evaluate Example 2. Find Example 3. Evaluate Example 4. Evaluate 9 x2 dx 2 x 1 x2 x2 4 dx dx x a 2 2 , where a 0. x 3 2x x 2 dx Inverse Substitution Formula For Definite Integral Let x=g( t ) and g has an inverse function, we have b a f ( x)dx f ( g (t )) g (t )dt where g 1 (a) Example 5. Find a 0 g 1 (b) a 2 x 2 dx (a 0) Example 6. Find the area enclosed by the ellipse x2 y 2 2 1 2 a b 3 3 2 Example 7. Find 0 x3 dx 2 32 (4 x 9) 7.4 Integration of rational functions by partial fraction In this section we show how to integrate any rational function (a ratio of polynomials) by expressing it as a sum of simpler fraction(called partial fraction). Consider a rational function P( x) f ( x) Q( x ) where P and Q are polynomials. If P( x) an x n an1x n1 a1x a0 where an 0 ,then the degree of P is n and we write deg(P) = n We can integrate rational functions according to 3 steps: Step 1. First express f as a sum of simpler fractions. Provide that the degree of P is less than the degree of Q. Such a rational function is called proper. If f is improper, that is, deg(P) deg(Q), we can divide Q into P by long division until a remainder R(x) is obtained such that deg(R)<deg(Q). The division statement is P( x) R( x) f ( x) S ( x) (1) Q( x) Q( x) where S and R are also polynomials. Step 2. Second factor the denominator Q(x) as far as possible. It can be shown that any polynomial Q can be factored as a product of linear factors(of the form ax+b) and irreducible quadratic factors (of the form ax2 bx c, where b2 4ac 0). Step 3. Finally express the proper rational function R(x)/Q(x) as a sum of partial fractions of the form A (ax b)i or Ax B (ax2 bx c) j A theorem in algebra guarantees that it is always possible to do it. We explain the details for the 4 cases that occur. Case 1. The denominator Q(x) is a product of distinct linear factors. Q( x) (a1x b1 )( a2 x b2 )(ak x bk ) The partial fraction theorem states there exist constants A1, A2 , Ak (2) such that R( x) A1 A2 Ak Q( x) a1x b1 a2 x b2 ak x bk These constants need to be determined. x2 2x 1 Example 1. Evaluate 3 dx. 2 2 x 3x 2 x Example 2. Find dx 2 2 , where a 0. x a Case 2. Q(x) is a product of linear factors, some of which are repeated. Suppose the first linear factor (a1 x b1 ) is repeated r times; that is, (a1 x b1 ) r occurs in the factorization of Q(x). Then instead of the single term A1 (a1 x b1 ) in Equation 2, we would use (3) A1 A2 Ar 2 a1 x b1 (a1 x b1 ) (a1 x b1 ) r x4 2x2 4x 1 dx. Example 3. Find 3 2 x x x 1 Case 3. Q(x) contains irreducible quadratic factors, none of which is repeated. If Q(x) has the factor (ax2 bx c), where b2 4ac 0, then, in addition to the partial fraction in Equation 2 and 3, the expression for R(x)/Q(x) will have a term of the form (4) Ax B ax2 bx c where A and B are constants to be determined. We can integrate (4) by completing the square and using the formula dx 1 1 x x 2 a 2 a tan ( a ) C 2 x2 x 4 dx Example 3. Find 3 x 4x (5) 4 x 2 3x 2 dx Example 4. Evaluate 2 4x 4x 3 Case 4. Q(x) contains a repeated irreducible quadratic factors. 2 r 2 ( ax bx c ) , where b 4ac 0, If Q(x) has the factor then instead of the single partial fraction(4), the sum (6) A1x B1 A2 x B2 Ar x Br 2 2 2 ax bx c (ax bx c) (ax2 bx c) r occurs in the partial fraction decomposition of R(x)/Q(x). Each of the term in (6) can be integrated by completed the square and making a tangent substitution. 1 3x 2 x 2 x 3 Example 5. Evaluate dx 2 2 x( x 1) 7.5 Rationalizing substitutions By means of appropriate substitutions, some functions can be changed into rational functions. In particular, when an integrand contains an expression of the form n g ( x) , then the substitution u = n g ( x) may be effective. Example 1. Evaluate Let Example 2. Find Let x4 dx x u x4 u6 x dx x 3 x The substitution t = tan(x/2) will convert any rational function of sinx and cosx into an ordinary rational function. This is called Weierstrass substitution. Let Then x t tan x 2 1 1 1 x cos 2 2 sec x 1 t 2 x 1 tan 2 2 t x x x sin cos tan 2 2 2 1 t2 Therefore t 1 2t x x sin x 2 sin cos 2 2 2 2 1 t 2 2 1 t 1 t 2 x x 1 t cos x cos2 sin 2 2 2 2 1 t Since t = tan(x/2), we have x 2 tan 1 t , so 2 dx dt 2 1 t Thus if we make the substitution t = tan(x/2), then we have (1) sin x 2t 1 t2 1 t2 cos x 1 t2 1 dx Example 3. Find 3sin x 4 cos x 2 dx dt 2 1 t 7.6 Strategy For Integration Integration is more challenging than differentiation. In finding the derivative of a function it is obvious which differentiation formula we should apply. But when integrating a given function, it may not be obvious which techniques we should use. First it is useful to be familiar with the basic integration formulas. Table of integration formulas Constants of integration have been omitted. n1 x 1. x n dx (n 1) n 1 1 2. dx ln x x 3. e x dx e x sin xdx cos x 7. sec2 xdx tan x 9. sec x tan xdx sec x 11. sec xdx ln sec x tan x 13. tan xdx ln sec x 15. sinh xdx cosh x 5. ax 4. a dx ln a 6. cos xdx sin x x 8. 2 csc xdx cot x 10. csc x cot xdx csc x 12. csc xdx ln csc x cot x 14. cot xdx ln sin x 16. cosh xdx sinh x dx 1 1 x 17. 2 tan ( ) 2 a a x a 18. dx 1 xa 19. 2 ln 2 2a x a x a 20. dx x sin ( ) 2 2 a a x dx ln x x 2 a 2 x2 a2 1 Secondly if you do not immediately see how to attack a given integral, you might try the following four-step strategy. 1. Simplify the integrand if possible. 2. Look for an obvious substitution. 3. Classify the integrand according to its form. 4. Try again. (a) Try substitution. (b) Try parts. (c) Manipulate the integrand. (d) Relate the problem to previous problems. (e) Use several methods. Example 1. tan 3 x cos3 x dx Example 2. x e dx Example 3. x5 1 x3 3x2 10 x dx Example 4. dx x ln x Example 5. 1 x dx 1 x 7.7 Using Tables of Integrals and Computer Algebra Systems 7.8 Approximation Integration •How to integrate x2 e dx or 1 1 1 x 3 dx ? It is difficult, or even impossible, to find an antiderivative. •When the function is determined from a scientific experiment through instrument readings, how to integrate such discrete function? In both cases we need to find approximate values of definite integrals. Using Riemann sums The left endpoint approximation (1) n f ( x)dx Ln f ( xi 1 )x i 1 The right endpoint approximation b a (2) n f ( x)dx Rn f ( xi )x i 1 (3) Midpoint rule b a f ( x)dx M n x[ f ( x1 ) f ( x2 ) f ( xn )] b a where and x b a n 1 xi ( xi 1 xi ) midpoit of 2 [ xi 1 , xi ] (4) Trapezoidal rule x b a f ( x)dx Tn [ f ( x0 ) 2 f ( x1 ) 2 f ( x2 ) 2 2 f ( xn 1 ) f ( xn )] ba where x and xi a ix n Example 1. Use (a) the Trapezoidal Rule (b) the Midpoint Rule with n=5 to approximate the integral 12 (1 x)dx. Notice . f ( x)dx approximation error b a The error in using an approximation is defined to be the amount that needs to be added to the approximation to make it exact. In general, we have ET f ( x)dx Tn b a (5) Error bounds and EM f ( x)dx TM b a Suppose f ( x) K for a x b. If ET and EM are the errors in the Trapezoidal and Midpoint Rules, then K (b a)3 K (b a)3 ET and EM 2 2 12n 24n Example 2. (a) Use the Midpoint Rule with n=10 to 1 x approximate the integral 0 e dx. 2 (b) Give an upper bound for the error involved in this approximation. (6) Simpson’s Rule x f ( x)dx S n [ f ( x0 ) 4 f ( x1 ) 2 f ( x2 ) 4 f ( x3 ) 3 2 f ( xn 2 ) 4 f ( xn 1 ) f ( xn )] b a where n is even and x (b a) n . Example 3. Use Simpson’s Rule with n=10 to approximation 2 (1 x)dx. 1 (7) Error bound for Simpson’s Rule Suppose that If ES then f ( 4) ( x) K for a x b. is the error involved in using Simpson’s Rule, K (b a)3 ES 4 180n Example 4. (a) Use Simpson’s Rule with n=10 to approximate the integral 1 e x dx. 0 2 (b) Estimate the error involved in this approximation. 7.9 Improper Integrals In defining a definite integral ab f ( x)dx we deal with (1) the function f defined on a finite interval [a, b]; (2) f is a bounded function. Question: How to integrate a definite integral when the interval is infinite or when f is unbounded ? Type 1 Infinite Intervals y 1 x2 Consider the infinite region that lies under the curve , above the x-axis and from the line x=1 to infinite, can this area A be infinite? Notice A(t ) t 1 and t 1 1 1 dx 1 2 x x1 t 1 lim A(t ) lim (1 ) 1 t t t So the area of the infinite region is equal to 1 and we write 1 1 t 1 dx lim 1 2 dx 1 2 t x x (1)Definition of An Improper Integral of Type 1 (a) If t f ( x)dx exists for every number t a , then a t a f ( x)dx lim a f ( x)dx t provide this limit exists(as a finite number). (b) If b f ( x)dx exists for every number t b , then t b f ( x)dx lim t b t f ( x)dx provide this limit exists(as a finite number). The improper integrals in (a) and (b) are called convergent if the limit exists and divergent if the limit does not exist. (c) If both f ( x)dx and a f ( x)dx are convergent, a then we define a f ( x)dx f ( x)dx a f ( x)dx Example 1. Determine whether the integral 1 1 dx is convergent or divergent. x 0 x Example 2. Evaluate xe dx. Example 3. Evaluate 1 dx 2 1 x Example 4. For what value of p is the integral 1 1 dx p x convergent? (2) 1 1 dx is convergent if p >1 and divergent if p 1. p x Type 2 Discontinuous Integrands (3) Definition of An Improper Integral of Type 2 (a) If f is continuous on [a,b) and lim f ( x) , then b a f ( x)dx lim t b t b t a f ( x)dx if this limit exists(as a finite number). (b) If f is continuous on (a,b] and lim f ( x) , then b a f ( x)dx lim t a t a b t f ( x)dx if this limit exists(as a finite number). The improper integrals in (a) and (b) are called convergent if the limit exists and divergent if the limit does not exist. (c) If lim f ( x) , where a<c<b, and both t c c a f ( x)dx and cb f ( x)dx are convergent, then we define b a c b a c f ( x)dx f ( x)dx f ( x)dx t b lim f ( x)dx lim f ( x)dx t c Example 5. Find 5 2 t c a t 1 dx. x2 Example 6. Determine whether 1 2 sec x dx converges or diverges. 3 dx Example 7. Evaluate 0 x 1 1 Example 8. Find 0 ln xdx. if possible. A Comparison Test For Improper Integrals (4)Comparison Theorem Suppose that f and g are continuous functions with f ( x) g ( x) 0 a f ( x)dx (a) If convergent. a g ( x)dx (b) If divergent. for x a. is convergent, then a g ( x)dx is divergent, then a Example 9. Show that (a) (b) x2 0 e dx x 1 e dx 1 x f ( x)dx is is convergent. is divergent. is