Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
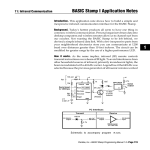
STAMP : Saclay Telescope for the Alignment of Many Points CCD (long arm) lens screen + grid y z x glass plates at 45° laser beam CCD (short arm) STAMP characteristics (Freiburg/Saclay DATCHA version) : •2 arms (long & short) for the measurement of the laser beam position ( y, z) and direction (qy, qz) •Absolute positioning (using fiducial grids) •Precision on laser position in the STAMP local coordinate system: y,z ~ 10 mm ; qy,qz ~ 50 mrad •Dynamical range (mm) : 30*38 with peripheral grids (screen size: 40*45) • Transparency ~ 92% • laser = 685 nm ( 0.2 mW) •Dimensions (mm) : 290 * 100 * 50 Freiburg 7/07/2000 1 40 mm STAMP PRINCIPLE: 290 mm reference laser beam (TEM00 from pigtail) x LEDs for calibration with the grid screen + fiducial grid reconstructed spot position lens CCD laser spot on CCD (demagnification: g ~ 1/10) laser spot on screen 100 mm STAMP top view pixel unit reconstruction precision on the screen, = 10 mm on the CCD (.g): 1 mm ( 13 % of a pixel). Freiburg 7/07/2000 2 STAMP CALIBRATION (1) Goal: Correct for the unprecise mechanical positioning of the glass plates and the fiducial grids. Principle: •Build a reference STAMP out of 2 precisely known positions of a reference grid (using CMM + optical control) •With the same camera, compare the STAMP grid seen by reflection on the glass plate with the reference grid. external camera looking at the grid of the 2nd arm (long arm) or at the reference support cube of the reference grid grid at the mirrored position of the 2nd grid (with respect to the reflecting face of the 2nd glass plate) Freiburg 7/07/2000 2nd grid (from the long arm) (mechanical reference, spheres - -, not shown ) 3 STAMP CALIBRATION (2) •The positions of the reference grids w.r.t. the STAMP support balls of the calibration bench (measured with a CMM and an optical bench) define the reference STAMP (calistamp) with its transfer matrix T: Spot coordinates on the 2 screens (short and long arms) xs ys xl yl T y z qy qz Laser coordinates T is calculated with a software simulation program. The calibration constants are used for the corrections of the measured spot coordinates. 2 set of calibration constants (for each arm): Long term calibration constants, derived from the ‘ CALISTAMP ’ calibration (done only once). • Calistamp grid to STAMP grid : dx, dy, qz, scale(x), scale(y) + 5 parameters to account for STAMP screen distortions (photo paper) • 4 deviation constants: dx, dy, qx, qy Freiburg 7/07/2000 4 Reconstructed grids: Stamp/calistamp grid fit quality: c2 x Stamp grid (peripheral) y Calistamp grid (full) Arm nb mm STAMP deviations Freiburg 7/07/2000 5 Stability of ‘ CALISTAMP’ calibration constants: Comparison of calibration constants from two calibration runs taken at 2 monthes interval (25/01/2000 and 22/03/2000): •The vertical scale shows the maximum effect of the difference (i.e. at the grid edges). •The horizontal scale refers to the 12 short arms and the 12 long arms for the 12 DATCHA STAMPs mm Stamp/calistamp grid position dx, dy Freiburg 7/07/2000 mm mm Stamp/calistamp grid rotation and x-y scales Stamp deviations Dy, Dz 6 STAMP CALIBRATION (3) Short term calibration constants, derived from illuminated screen images • STAMP grid to CCD pixels : Dx, Dy, Q, demagnifications (x, y) + 5 parameters to account for lens aberrations (identical for all arms) Stamp grid fit quality: c2 x Present difficulties: • Permanent illumination system (red LEDs) not yet installed • Calibration done after removal of STAMP from their supports and after removal of a light protection cover made out of scotch tapes: CCDs may have moved during this operation (stability < 1 mm required). Freiburg 7/07/2000 y 7 FREIBURG 4m TEST: ~ 1.7 m ~ 1.7 m laser x fixed Stamp Freiburg 7/07/2000 x x Stamp on a movable platform Run conditions: •No shielding tubes •All fans on •All light off fixed Stamp 8 Measured quantities in the 4m test: The local support coordinate systems are defined from the 3 balls (cone/slot/flat) positions. qy1 sagy slot qy3 flat yo3 cone yo1 Support 1 Support 2 Support 3 Quantities measured by the STAMP and the CMM: • Sagittas : sagy, sagz • Coordinates of the external frames in the local coordinate frame of the central support: yo1, zo1, yo3, zo3 , qy1, qz1, qy3, qz3 ( For the STAMP: assume that the axis o1y1 and o3y3 are parallel to the x2o2y2 plane) Freiburg 7/07/2000 9 Results of the 4m test: 9 data sets: 7 different positions of support 2, 2 runs per data set •pos 0_1 : Reference positions •pos 0_2 : STAMP 2 removed and remounted •pos 1 : 12 mm shift in z (laser moved) •pos 2 : add a 10 mrad tilt around y axis (images mixed up > missing) •pos 3 : remove the 12 mm z shift •pos 4 : add a 10 mm shift in y (laser moved) •pos 5 : remove the tilt around y •pos 6_1 : back to the reference position •pos 6_2 : laser moved Freiburg 7/07/2000 10 Measured quantities in the 14m test: 4260 mm 3390 mm x STAMP 1 x mirrors STAMP 2 5630 mm x x mirrors STAMP 3 STAMP 4 Quantities measured by the STAMP : • Coordinates of the external frames in the local coordinate frame of the STAMP 2 support: yo1, zo1, yo3, zo3 , yo4, zo4 , qy1, qz1, qy3, qz3 , qy4, qz4 ( assuming that the axis o1y1, o3y3 and o4y4 are parallel to the x2o2y2 plane) Quantities measured by the CMM : • Coordinates of the balls which defines the local coordinate frame of the STAMP 2 support. Freiburg 7/07/2000 Spot at 14 m 11 Nices features: • Use commercial products (CCD, glass plates, lenses). • No precision mechanics required. • Can easily be improved with new CCDs ( larger CCD => shorter device). • Large range (from 30x38 mm to 40x40mm with the LED scheme shown below). • Can work with visible laser light. • Fast and simple calibration (1 week for 180 STAMPs). • Radiation hardness (same technology as the TC255 tested at Prospero). • High transparency : 56% of intensity left after 7 STAMPs (intermediate h ray with 4 MDT and 3 TGC layers). Present problems: • The DATCHA/Freiburg STAMP has been built with a too soft aluminium alloy with ball inprints larger than 10 mm. • When working with visible laser, some light protection (short tubes ) may be needed to protect from parasitic light. May be solved by using a pulsed laser and background image subtraction (not done in the Freiburg test). • Bad laser optics used for the Freiburg test (problem at 14 m). and potential improvements: • Size (length = 290mm). With a twice as large CCD (presently 4 x 3.5 mm for the TC237), the demagnification can be reduced to 1/5 and the length decreased down to 200 mm. • The thick glass plate (5mm) can possibly be replaced by a thin mylar foil (10mm) canceling the secondary reflection and the beam deviation. • The LED system for illumination of the grid during the runs for the control of the lens-CCD positions w.r.t. the screen has not yet been tested). Simulation shows that the grid can be replaced by 4 LEDs at the screen corners (see figure). Freiburg 7/07/2000 12 Integration inside the ATLAS spectrometer : The principle of the STAMP implementation in the End Cap spectrometer is shown on the sketch on the right. The laser can be placed either at the EI or at the EO layer. No STAMP size problem is expected st the EM and EO layers. At EI, it is possible to replace the STAMP by the laser itself. This may even simplify the system implementation with the intermediate polar beam (large distance between the bar and the beam, which requires a periscope system when optical sensors are used. platform EI bar Laser head Piezo aiming system (+- 0.1 mm, remote control) Laser fiber Freiburg 7/07/2000 13 STAMP cost table : •Mechanics •glass plates •CCD TC 237 •lenses TOTAL Freiburg 7/07/2000 300 x 2 300 x 2 50 x 2 2000 FF 600 FF 600 FF 100 FF 3300 FF (500 Euros) 14