Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
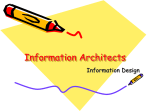
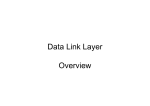
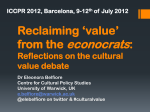
Physics 114: Lecture 8 Measuring Noise in Real Data Dale E. Gary NJIT Physics Department Mean and Standard Deviation 1 N x Sample Mean x 1 Parent population mean lim N N Standard Deviation from sample mean 2 1 Standard Deviation from parent population mean lim xi . N N i x i 2 1 s xi x . N 1 February 12, 2010 Homework 1 Data Note, “data” is plural Hat-P-6 b Transit 10.44 10.45 10.46 V Magnitude 10.47 10.48 10.49 10.5 10.51 10.52 10.53 3 3.5 4 4.5 Time (UT hours) 20 Number of points The HAT-P-6 b transit data are shown at the right. If in MatLAB you type mean(a(:,6)) and std(a(:,6)), you will find that the data have a mean of 10.50, and standard deviation of 0.015. The plot at lower right shows the histogram of the measurements with an overlay of a Gaussian (normal distribution) bell curve using the parameters above. 15 10 5 0 10.44 10.45 10.46 10.47 10.48 10.49 V Magnitude 10.5 10.51 10.52 February 12, 2010 10.53 Homework 1 Data As an example of evaluating data in a real application, consider the HAT-P-6 data from homework 1. This is data taken during an eclipse of a star by a planet (that is, the planet is crossing in front of the star, causing a very small decrease in light level). Unfortunately, I could not get everything set up in time, and I only got the time at the end of the eclipse (egress). The data came from images of the star field, and there are several steps to obtaining the light curve. Two examples of eclipses by others, with more complete lightcurves. February 12, 2010 Homework 1 Data Here is a fit to the measurements that you read in. The curve is the expected eclipse lightcurve obtained from “forward fitting” using a model for the eclipse. Note the “trend removed” curve, which is an example of a systematic error. February 12, 2010 Homework 1 Data The magnitude measurements are themselves made with images from a CCD camera, which have their own systematic and random errors. The systematic errors can be removed through calibration, and as mentioned before, they include both additive and multiplicative errors. To remove such systematic errors, we want to make the random errors in the calibration data as small as possible. Let’s go through the process and introduce CCD cameras. February 12, 2010 How CCDs Work • Photons to Analog/Digital Units (Counts) m m One photon has 73% chance to cause release of an electron (e-). It takes 1.6 e- to give 1 count. So 100 photons will result in 100*0.73/1.6 = 45 counts. Each well can hold 120,000 e- = 55000 counts These 2 parameters give conversion of photons to counts 2010 Feb 13 How CCDs Work • Bias (additive) m m Even with 0 s exposure, just reading out the image gives (on average) 17 e-, or about 10 counts. This is called bias, and is neither temperature nor time dep. These 2 parameters give noise output 2010 Feb 13 How CCDs Work • Dark Current (additive) m m With a time exposure, say a 1 min exposure at -30 C, will have 19 more counts. This is BOTH temperature and time dep. These 2 parameters give noise output 2010 Feb 13 Imaging First Principles • • • • • The last step is to take calibration frames: Bias, Dark, and Flat frames. I take 20 Bias and 20 Dark (set camera cooler to temperature first, and take dark frames for same duration as imaging frames). I take 10-20 flat frames (need even illumination—set duration for mid-range exposure). Bias frames are instantaneous, for subtraction of read noise. Dark frames are same duration as imaging frames, for subtraction of dark current and correction of hot pixels. Flat frames are for removal of non-uniform illumination (vignetting and dust). Images are divided by flat frames. 2010 Feb 13 Imaging First Principles • Noise is the enemy, so average calibration frames. 2010 Feb 13 Imaging First Principles • Flat field light box Image calibration Image without with Calibration 2010 Feb 13