Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
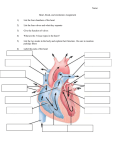
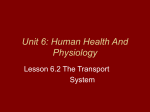
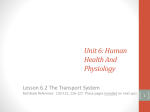
TEAM MEMBERS Dan Carlson Dave Ugai Erik Bieging Team Leader Communicator BWIG/BSAC “THE SOLUTIONATORS” From left: Dave Ugai, Erik Bieging, and Dan Carlson CLIENTS Jinling Wang, Ph.D. Research Associate Department of Physiology Gail A. Robertson, Ph.D. Associate Professor Department of Physiology ADVISOR Professor John G. Webster, Ph.D. ABSTRACT The objective of the project is to design an automated system of valves for a solution delivery system to be used in patch clamp research. The current system has two to eight solution reservoirs suspended in the air above a manifold. The manifold allows the researcher to manually control which solution is being delivered. This is a tedious process for the researcher, so an automated system is desired. PROBLEM STATEMENT The goal of this project was to develop a computer-automated system for delivering solutions to a patch clamp for physiological laboratory research. PATCH CLAMP Method used to study single cells HERG potassium channel is critical in repolarization of the heart’s action potential Long QT syndrome is a disease that can lead to cardiac arrhythmia or sudden death MICRO PIPET OVER ION CHANNEL http://www.iac-usnc.org/Methods/wholecell/equipment.html CURRENT SETUP Solutions are fed to a manifold and as the orientation of the multiposition stop-cocks is changed, the solution being delivered changes MOTIVATION •The current method for switching solutions is manually changing the alignment of valves on a manifold •This is a tedious process that wastes valuable research time CLIENT REQUIREMENTS Must reliably open and close valves on command from the computer Compatible with up to eight feeds of medical tubing Must generate minimal electrical and mechanical noise (so as not to disturb delicate physiological research) VARIABLE DESIGN COMPONENTS 1. Valves: solenoid or solenoid pinch valve (both normally closed) 2. Valve Controller: Valvelink8, Controlled 8 relay driver, Manually assembled controller SOLENOID VALVES When current runs through the solenoid the plunger is drawn up and the valve opens SOLENOID PINCH VALVES The spring loaded plunger pinches the tubing, and when current runs through the solenoid, the plunger is pulled back. DECISION MATRIX Price Valvelink8 R85PRO Manually assembled 1 5 9 Simplicity 10 8 4 Reliability 10 9 7 Total 24 20 21 FINAL DESIGN COMPONENTS 1. R85PRO relay driver (1) 2. 1/8 inch solenoid valves, normally closed (8) 3. RSIO Adapter (1) 4. Serial cable (1) 5. 8-into-1 Teflon micro manifold with flow control (1) 6. NPT Male Pipe adapter (1/8” x 1/16”) (16) MOUNTED DESIGN 1. R85PRO Driver 3 2. Solenoid valves 1 2 3. RSIO adapter The design was mounted on foam pads in a plastic box to reduce the mechanical noise produced by the valves FUTURE WORK Install device in client’s laboratory Configure with pClamp data acquisition software Provide instruction to client on usage REFERENCES Jack Commins, sales representative, AutoMate Scientific L. Burke O’Neal, Biomedical Engineering Instrument Innovator, UW Madison Ryan Sheldon, owner, National Control Devices, controlanything.com James A. Sullivan, author, www.cellsalive.com American Heart Association, website, www.americanheart.org