Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Euclidean vector wikipedia , lookup
Tensor operator wikipedia , lookup
Bra–ket notation wikipedia , lookup
Quadratic form wikipedia , lookup
Determinant wikipedia , lookup
Rotation matrix wikipedia , lookup
Basis (linear algebra) wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Matrix (mathematics) wikipedia , lookup
Cartesian tensor wikipedia , lookup
System of linear equations wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Linear algebra wikipedia , lookup
Orthogonal matrix wikipedia , lookup
Four-vector wikipedia , lookup
Gaussian elimination wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
Matrix multiplication wikipedia , lookup
Matrix calculus wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Jordan normal form wikipedia , lookup
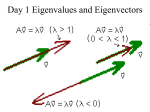
Eigenvalues and Eigenvectors Computations And Geometry Eigenvalues and Eigenvectors Let A be a 𝑛 × 𝑛 matrix if there exists 𝜆 ∈ ℝ a scalar, and x a nonzero vector 𝐱 ∈ ℝ𝑛 such that 𝐴𝐱 = 𝜆𝐱. We call 𝜆 an eigenvalue of the matrix A and x an eigenvector of the matrix A. 𝜆 is a Eigenvalue for A 𝐱 ≠ 𝜽 is a Eigenvector for A 𝐴𝐱 = 𝜆𝐱 Numerical Interpretation of Eigenvalues In terms of matrix arithmetic eigenvalues turn matrix multiplication into scalar multiplication. Numerically knowing an eigenvalue tremendously lowers the number of operations required to get the result of a matrix multiplication. This optimizes the performance of certain algorithms that are used in the areas of computer graphics and engineering. The question that arises in this chapter is how can we determine what the eigenvalues and eigenvectors of a matrix are? What properties do eigenvalues of a matrix have? Eigenvalues and Singular Matrices Remember a square matrix A is singular if and only if there exists a nonzero solution x to the matrix equation 𝐴𝐱 = 𝜽. In order to apply this we subtract 𝜆𝐱 from both sides of the equation, but we can not immediately factor out x since A is a matrix and 𝜆 a scalar the operation 𝐴 − 𝜆 is not defined. Multiply x by the identity matrix I, we get that 𝜆 is a eigenvalue for A when 𝐴 − 𝜆𝐼 is singular, or the eigenvalues of A are the values 𝜆 that make the matrix 𝐴 − 𝜆𝐼 singular. 𝐴𝐱 = 𝜆𝐱 𝐴𝐱 − 𝜆𝐱 = 𝜽 𝐴𝐱 − 𝜆𝐼𝐱 = 𝜽 𝐴 − 𝜆𝐼 𝐱 = 𝜽 If and only if: 𝐴 − 𝜆𝐼 𝑖𝑠 𝑠𝑖𝑛𝑔𝑢𝑙𝑎𝑟 Eigenvectors and Null Spaces If the matrix 𝐴 − 𝜆𝐼 is singular then all nonzero vectors x such that 𝐴 − 𝜆𝐼 𝐱 = 𝜽 are the eigenvectors of A. All vectors x such that 𝐴 − 𝜆𝐼 𝐱 = 𝜽 is the null space of A. This we call the eigenspace of the eigenvalue 𝜆. 𝐱 𝑎𝑛 𝑒𝑖𝑔𝑒𝑛𝑣𝑒𝑐𝑡𝑜𝑟 𝑜𝑓 𝐴 Then, 𝐱 ∈ 𝒩 𝐴 − 𝜆𝐼 Remember a 2 × 2 matrix 𝑎𝑐 𝑑𝑏 is singular if and only if 𝑎𝑑 − 𝑏𝑐 = 0. This gives a method for how to find the eigenvalues of 2 × 2 matrices. Finding Eigenvalues of 2 × 2 Matrices To find the eigenvalues of a 2 × 2 matrix 𝐴 = 𝑎 𝑐 𝑏 𝑑 we do the following: 1) Form the matrix 𝐴 − 𝜆𝐼 this amounts to subtracting 𝜆 down the main diagonal of the matrix. 2) Solve the equation 𝑎 − 𝜆 𝑑 − 𝜆 − 𝑏𝑐 = 0 for 𝜆. Treat 𝜆 as the variable and either factor this or use the quadratic equation if it can not be factored. Finding Eigenvectors of 2 × 2 Matrices After you have found each eigenvalue 𝜆, to find the eigenvectors associated with an eigenvalue 𝜆 find a basis for 𝒩 𝐴 − 𝜆𝐼 since basis vectors are never zero. 1 0 𝑎 𝑏 −𝜆 0 1 𝑐 𝑑 𝑎 𝑏 𝜆 0 = − 𝑐 𝑑 0 𝜆 𝑎−𝜆 𝑏 = 𝑐 𝑑−𝜆 Singular, if and only if, 𝑎 − 𝜆 𝑑 − 𝜆 − 𝑏𝑐 = 0 𝐱 𝑎𝑛 𝑒𝑖𝑔𝑒𝑛𝑣𝑒𝑐𝑡𝑜𝑟 x a basis vector for: 𝒩 𝐴 − 𝜆𝐼 Example Find the eigenvalues and associated eigenvectors for the 2 × 2 matrix A given to the right. 𝐴= 7 −5 10 −8 7−𝜆 10 , which is singular if 7 − 𝜆 −8 − 𝜆 − −5 10 = 0 −5 −8 − 𝜆 Solve this equation for 𝜆 by first multiplying it out then 7 − 𝜆 −8 − 𝜆 − −5 10 trying to factor it or else use the quadratic equation if it = 𝜆2 + 𝜆 − 56 + 50 will not factor. = 𝜆2 + 𝜆 − 6 From this we see that 𝜆 = −3 or 𝜆 = 2. = 𝜆+3 𝜆−2 =0 𝐴 − 𝜆𝐼 = For the eigenvalue -3, 10 10 𝐴 − −3 𝐼 = 𝐴 + 3𝐼 = −5 −5 1 1 Row reducing, we get: 0 0 −𝑥2 −1 Vector form of solution: 𝑥 = 𝑥2 2 1 For the eigenvalue 2, 5 10 𝐴 − 2𝐼 = −5 −10 1 2 Row reducing, we get: 0 0 −2𝑥2 −2 Vector form of solution: = 𝑥2 𝑥2 1 Check, 7 10 −1 3 −1 𝐴 = = −5 −8 1 −3 1 3 −1 −3 = −3 1 −1 Eigenvalue -3 with eigenvector . 1 Check, 7 10 −2 −4 −2 𝐴 = = −5 −8 1 2 1 −4 −2 2 = 2 1 −4 Eigenvalue 2 with eigenvector . 2 Geometric Interpretation of Real Eigenvectors If 𝑇: ℝ𝑛 → ℝ𝑛 is a linear transformation given by 𝑇 𝐯 = 𝑀𝐯. If x is an eigenvector for M with eigenvalue 𝜆 then the result of applying T to x changes the length of x (maybe points in opposite direction 𝜆 < 0). Example Let 𝑇: ℝ2 → ℝ2 be a reflection through the y-axis and M the matrix so that 𝑇 𝐯 = 𝑀𝐯. Find the eigenvalues and eigenvectors for M. −𝑥1 −1 0 𝑥1 From the picture we get 𝑀𝑥 = 𝑥 = 0 1 𝑥2 2 −1 − 𝜆 0 𝑀 − 𝜆𝐼 = , singular if −1 − 𝜆 1 − 𝜆 = 0 0 1−𝜆 0 0 −2 0 𝑀 − −1 𝐼 = 𝑀 + 𝐼 = , 𝑀−𝐼 = , 0 2 0 0 0 1 1 0 Row reduces to: Row reduces to: 0 0 0 0 𝑥 1 0 0 Vector solution: 1 = 𝑥1 Vector solution: = 𝑥 2 0 0 𝑥2 1 1 0 Eigenvector for -1 is: Eigenvector for 1 is: 0 1 𝑇 𝐱 = 𝑀𝐱 = 𝜆𝐱 𝐱 y −𝑥1 𝑥2 𝑥1 𝑥2 x Eigenvalues: 𝜆 = −1, 𝜆 = 1 𝑇 𝑇 0 1 1 0 =1 = −1 0 1 1 0 0 1 1 0 Vectors on the positive x-axis are sent to negative x-axis and visa versa. While vectors on the y-axis remain fixed. Example Let 𝑇: ℝ2 → ℝ2 be a projection onto the vector 𝐰 = 11 (i.e. 𝑇 𝐯 = 𝑝𝑟𝑜𝑗𝐰 𝐯). Find the matrix M such that 𝑇 𝐯 = 𝑀𝐯 and compute its eigenvalues and eigenvectors. 𝑇 𝐞1 = 𝑝𝑟𝑜𝑗𝐰 𝑇 𝐞2 = 𝑝𝑟𝑜𝑗𝐰 1 = 0 0 = 1 1 2 1 2 1 2 1 2 𝑠𝑜 𝑀 = 1 2 1 2 1 2 1 2 Factoring this we get 𝜆 𝜆 − 1 = 0 this gives eigenvalues 𝜆 = 0 and 𝜆 = 1. 𝐰= −1 1 1 1 𝑇 𝐰 =1 𝑇 −1 1 =0 1 1 For a projection, 1 2 Singular if, 12 − 𝜆 Or, 𝜆2 − 𝜆 = 0 1 2 1 2 −𝜆 − 𝜆 − 14 = 0 1 2 1 2 𝑀− 0 𝐼=𝑀= 1 2 1 2 , 1 1 0 0 −𝑥2 −1 Vector solution: 𝑥 = 𝑥2 2 1 −1 Eigenvector for 0 is: 1 𝑀−𝐼 = 𝐰𝑇𝐰 𝑝𝑟𝑜𝑗𝐰 𝐰 = 𝐰 𝑇 𝐰 𝐰 = 1𝐰, 1 is an eigenvalue If v is orthogonal to w, 𝑝𝑟𝑜𝑗𝐰 𝐯 = 1 2 −𝜆 Row reduces to: −1 1 𝐯𝑇 𝐰 𝐰 𝐰𝑇𝐰 𝑀 − 𝜆𝐼 = 1 2 = 0𝐰, 0 is an eigenvalue −1 2 1 2 1 2 −1 2 , 1 −1 0 0 𝑥2 1 Vector solution: 𝑥 = 𝑥2 2 1 1 Eigenvector for 0 is: 1 Row reduces to: Example Let 𝑇: ℝ2 → ℝ2 be a counterclockwise rotation of 𝜋2 (i.e. 90°). Find the matrix M such that 𝑇 𝐯 = 𝑀𝐯 and compute its eigenvalues and eigenvectors. 0 𝑇 𝐞1 = 1 −1 𝑇 𝐞2 = 0 𝑠𝑜 𝑀 = 0 −1 1 0 𝑀 − 𝜆𝐼 = −𝜆 1 −1 , −𝜆 Singular if, 𝜆2 + 1 = 0 The equation 𝜆2 + 1 = 0 has no real solutions, so this matrix has no real eigenvalues. In fact we can see geometrically that a 90° rotation do not fix or reverse the direction of any vector in the plane. This matrix has no real eigenvalues. The eigenvalues for this matrix are 𝜆 = 𝑖 and 𝜆 = −𝑖 which are known as imaginary numbers. More advanced course in linear algebra give an interpretation to these values but for right now we will say this matrix has no real eigenvalues. Because the matrix has no eigenvalues it has no corresponding eigenvectors also.