Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
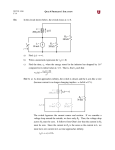
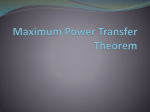
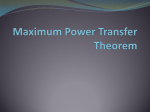
Passive components and circuits - CCP Lecture 12 1/31 Content Quartz resonators Structure History Piezoelectric effect Equivalent circuit Quartz resonators parameters Quartz oscillators Nonlinear passive electronic components Nonlinear resistors - thermistors Nonlinearity phenomenon 2/31 Quartz structure Housing Quartz crystal Bed-plate Ag electrodes, on both sides Ag contacts Inert gas, dry 3/31 History Coulomb is the first that discover the piezoelectric phenomenon Currie brothers are the first that emphasize this phenomenon in 1880. In the first world war, the quartz resonators were used in equipments for submarines detection (sonar). The quartz oscillator or resonator was first developed by Walter Guyton Cady in 1921 . In 1926 the first radio station (NY) uses quartz for frequency control. During the second World War, USA uses Quartz resonators for frequency control in all the communication equipments. 4/31 Piezoelectric effect Piezoelectricity is the ability of some materials (notably crystals and certain ceramics) to generate an electric potential in response to applied mechanical stress . If the oscillation frequency have a certain value, the mechanical vibration maintain the electrical field. The resonant piezoelectric frequency depends by the quartz dimensions. This effect can be used for generating of a very stable frequencies, or in measuring of forces that applied upon quartz crystal, modifying the resonance frequency. 5/31 Equivalent circuit L1, C1 : Mechanical energy – pressure and movement Electrical energy -Voltage and current RS : Energy losses Co : Electrodes capacitance Rs : (ESR) Equivalent series resistance Co : (Shunt Capacitance) Electrodes capacitance C1 : (Cm) Capacitance that modeling the movement L1 : (Lm) Inductance that modeling the movement 6/31 Equivalent impedance The equivalent electrical circuit consist in a RLC series circuit connected in parallel with C0 : Z ech 2 L1C1 1 jRs C1 Rs C1C0 j (C0 C1 2 L1C1C0 ) Z ech 1 1 L C 1 2 2 1 1 2 R s2C12 2 R 2C 2C 2 (C0 C1 2 L1C1C0 ) 2 s 1 0 7/31 Modulus variation In the figure is presented the variation of reactance versus frequency (imaginary part) Can be noticed that are two frequencies for that the reactance become zero (Fs and Fp). At these frequencies, the quartz impedance is pure real. 8/31 Resonant frequencies significance At these frequencies, the equivalent impedance have resistive behavior (the phase between voltage and current is zero). The series resonant frequency, Fs, is given by the series LC circuit. At this frequency, the impedance have the minimum value. The series resonance is a few kilohertz lower than the parallel one . At the parallel resonant frequency, Fa the real part can be neglected. At this frequency, the impedance has the maximum value. 9/31 Resonant frequencies calculus Z ech 2 2 2 2 2 2 2 1 Rs C1C0 L1C1 1 Rs C1 C0 C1 L1C1C0 j L1C1 1 C0 C1 L1C1C0 R s C 1 C0 2 R s2C 12C 02 (C0 C1 2 L1C1C0 ) 2 The imaginary part must be zero (real impedance) 4 L12C12C0 2 L1C1 C1 C0 L1C1C0 Rs2C12C0 C1 C0 0 4 L12C12C0 2 L1C 2 2 L1C1C0 Rs2C12C0 C1 C0 0 1 In the brackets, the term with Rs can be neglected: b 2 4ac L12C12 4C02 4C0C1 C12 4 L12C12C02 C0 C1 L12C14 10/31 Resonant frequencies calculus The solution are: 2 1, 2 b 2 L1C1C0 L1C12 L1C12 2a 2 L12C12C0 12 1 1 f1 f s L1C1 2 1 L1C1 C0 C1 1 f2 f p L1C1C0 2 2 2 1 C1C0 L1 C0 C1 11/31 Impedance value at resonant frequency 1 1 j Z ech (1 ) Rs C1 L1C1 L1C1 RC 1 L1C1 s 1 Rs 1 Rs C1C0 L1C1 C1 LCC j C0 C1 1 1 0 L1C1 L1C1 L1C1 (C0 C1 ) Rs C1 1 j L1C1C0 L1Cs Z ech (2 ) L1Cs Rs C1C0 L1C1C0 (C0 C1 ) j (C0 C1 ) L1C1C0 L1Cs L1C1 L1Cs 1 1 L1Cs L1 Rs C1C0 Rs C1 C0 C0 1 L1Cs C1 C1 12/31 Remarks The series resonant frequency depends only by L1 and C1 parameters, (crystal geometrical parameters). Can be modified only by mechanical action. The parallel resonant frequency can be adjusted, in small limits, connecting in parallel a capacitance. Results an equivalent capacitance Cech=C0+Cp. The adjustment limits are very low because the parallel resonant frequency is near the series resonant frequency. 13/31 Quartz resonator parameters Nominal frequency, is the fundamental frequency and is marked on the body. Load resonance frequency, is the oscillation frequency with a specific capacitance connected in parallel. Adjustment tolerance, is the maximum deviation from the nominal frequency. Temperature domain tolerance, is the maximum frequency deviation, while the temperature is modified on the certain domain. The series resonant equivalent resistance, is resistance measured at series resonant frequency (between 25 and 100 ohms for the majority of crystals). Quality factor, have the same significance as RLC circuit but have high values: between 104 and 106. Q 2 L1 Rs 14/31 Quartz oscillators The load circuit is equivalent with a load resistor Rl. Depending by the relation between Rl and Rs we have three operation regimes: Rs Q Rl Damping regime Rl+Rs>0 Amplified regime Rl+Rs<0 Self-oscillating regime Rl+Rs=0 15/31 Quartz oscillators – case I, Rl+Rs>0 16/31 Quartz oscillators – case II, Rl+Rs<0 17/31 Quartz oscillators – case III, Rl+Rs=0 18/31 Thermistors They are resistors with very high speed variation of resistance versus temperature. The temperature variation coefficient can be negative NTC (components made starting with 1930) or positive PTC (components made starting with 1950). Both types of thermistors are nonlinear, the variation law being : Rth R 0 A e Rth A e B T B T 19/31 NTC and PTC thermistors The temperature coefficient is defined as: 1 dRth B T 2 Rth dT T If the material constant B is positive, than the thermistor is NTC, if the material constant B is negative, the thermistor is PTC. 20/31 Analyzing nonlinear circuits R Rth E Rth v O1 Rth 1 E E R R Rth 1 Rth R PTC : T Rth vO1 Rth vO1 E R v O2 R 1 E E Rth R Rth 1 R Rth NTC : T Rth vO 2 R vO 2 21/31 Condition for using thermistors as transducers The dissipated power on the thermistor must be small enough such that supplementary heating in the structure can be neglected. This condition is assured by connecting a resistor in series. This resistor will limit the current through the thermistor. 22/31 The performances obtained with a NTC divider b 3450 Vout 1.286374 1.376124 1.468281 1.562551 1.658619 1.756156 1.854822 1.954269 2.05415 2.154121 2.253847 2.353002 2.451281 2.548394 2.644074 2.73808 2.830192 2.920219 3.007996 3.093382 3.176262 R 10000 E 5 Resistance vs. Temperature for NTC Thermistors 30000 3.2 3 RT 25000 2.8 Vout 2.6 20000 2.4 2.2 15000 2 1.8 10000 1.6 1.4 5000 1.2 0 5 10 15 20 25 30 35 40 Temperature (C) RT RT0 e b T0 T T0T 23/31 Vout (V) 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 T0 25 RT 28868.95 26333.94 24053.43 21998.96 20145.56 18471.27 16956.77 15585.01 14340.97 13211.32 12184.3 11249.45 10397.5 9620.204 8910.211 8260.974 7666.646 7122.002 6622.364 6163.541 5741.773 Resistance (Ohms) RT0 10000 T Nonlinearity phenomena Most variation laws of physical quantities are nonlinear. Consequently, the characteristics of electronic components based on such dependencies are nonlinear. Analysis of nonlinear systems using methods specific for linear systems introduce errors. These methods can be applied only on small variation domains, keeping in this way the errors bellow at a imposed limits. 24/31 Linearization – approximation of characteristics with segments y y y B B 0 0 x A Chord method B x 0 x A Tangent method A Secant method 25/31 Linearization – approximation of characteristics with segments Imposing the number of linearization intervals, results different errors from one interval to other. Imposing the error, results a number of linearization intervals, and dimensions for each interval. In both situation, the continuity condition must be assured on the ends of linearization intervals. 26/31 Linearization – nonlinearities reducing process v i1 R1 i2 R2 v1 v2 is Rs is R1 vs R2 v1 v2 vs ip Rp 0 i vp i1 R1 ip ip i2 R2 vp 27/31 Linearization – nonlinearities reducing process v i1 R1 i2 R2 v1 v2 is Rs is R1 vs R2 v1 v2 vs ip Rp 0 i vp i1 R1 ip ip i2 R2 vp 28/31 Linearization – exercises v Determine the voltagecurrent characteristic for the situations of connecting the components with the characteristics from the figure, in series or parallel. 0 i 29/31 Problems A nonlinear element with the voltage-current characteristics from the figure is considered. Determine the resistance connected in series/parallel with the nonlinear element in order to extend the linear characteristic in the domain of [-5V; 5V]. Determine the resistance connected in series/parallel with the nonlinear element in order to extend the linear characteristic in the domain of [-3mA; 3mA]. v [V] 5 4 3 2 1 0 -5 -4 -3 -2 -1 -1 1 2 3 4 i [mA] 5 -2 -3 -4 -5 30/31 Problems v [V] Propose a method to obtain the following characteristic starting from the mentioned nonlinear element. 5 4 3 2 1 0 -5 -4 -3 -2 -1 -1 1 2 3 4 5 -2 -3 -4 -5 31/31 i [mA]