Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Chapter 7: Process Synchronization
Background
The Critical-Section Problem
Synchronization Hardware
Semaphores
Classical Problems of Synchronization
Critical Regions
Monitors
Synchronization in Solaris 2 & Windows 2000
Operating System Concepts
7.1
Silberschatz, Galvin and Gagne 2002
Background
Concurrent access to shared data may result in data
inconsistency.
Maintaining data consistency requires mechanisms to
ensure the orderly execution of cooperating processes.
Shared-memory solution to bounded-buffer problem
(Chapter 4) allows at most n – 1 items in buffer at the
same time. A solution, where all N buffers are used is not
simple.
Suppose that we modify the producer-consumer code by
adding a variable counter, initialized to 0 and incremented
each time a new item is added to the buffer
Operating System Concepts
7.2
Silberschatz, Galvin and Gagne 2002
Bounded-Buffer
Shared data
#define BUFFER_SIZE 10
typedef struct {
...
} item;
item buffer[BUFFER_SIZE];
int in = 0;
int out = 0;
int counter = 0;
Operating System Concepts
7.3
Silberschatz, Galvin and Gagne 2002
Bounded-Buffer
Producer process
item nextProduced;
while (1) {
while (counter == BUFFER_SIZE)
; /* do nothing */
buffer[in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
counter++;
}
Operating System Concepts
7.4
Silberschatz, Galvin and Gagne 2002
Bounded-Buffer
Consumer process
item nextConsumed;
while (1) {
while (counter == 0)
; /* do nothing */
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
counter--;
}
Operating System Concepts
7.5
Silberschatz, Galvin and Gagne 2002
Bounded Buffer
The statements
counter++;
counter--;
must be performed atomically.
Atomic operation means an operation that completes in
its entirety without interruption.
Operating System Concepts
7.6
Silberschatz, Galvin and Gagne 2002
Bounded Buffer
The statement “count++” may be implemented in
machine language as:
register1 = counter
register1 = register1 + 1
counter = register1
The statement “count—” may be implemented as:
register2 = counter
register2 = register2 – 1
counter = register2
Operating System Concepts
7.7
Silberschatz, Galvin and Gagne 2002
Bounded Buffer
If both the producer and consumer attempt to update the
buffer concurrently, the assembly language statements
may get interleaved.
Interleaving depends upon how the producer and
consumer processes are scheduled.
Operating System Concepts
7.8
Silberschatz, Galvin and Gagne 2002
Bounded Buffer
Assume counter is initially 5. One interleaving of
statements is:
producer: register1 = counter (register1 = 5)
producer: register1 = register1 + 1 (register1 = 6)
consumer: register2 = counter (register2 = 5)
consumer: register2 = register2 – 1 (register2 = 4)
producer: counter = register1 (counter = 6)
consumer: counter = register2 (counter = 4)
The value of count may be either 4 or 6, where the
correct result should be 5.
Operating System Concepts
7.9
Silberschatz, Galvin and Gagne 2002
Race Condition
Race condition: The situation where several processes
access – and manipulate shared data concurrently. The
final value of the shared data depends upon which
process finishes last.
To prevent race conditions, concurrent processes must be
synchronized.
Operating System Concepts
7.10
Silberschatz, Galvin and Gagne 2002
The Critical-Section Problem
n processes all competing to use some shared data
Each process has a code segment, called critical section,
in which the shared data is accessed.
Problem – ensure that when one process is executing in
its critical section, no other process is allowed to execute
in its critical section.
Operating System Concepts
7.11
Silberschatz, Galvin and Gagne 2002
Solution to Critical-Section Problem
1. Mutual Exclusion. If process Pi is executing in its critical
section, then no other processes can be executing in their
critical sections.
2. Progress. If no process is executing in its critical section
and there exist some processes that wish to enter their
critical section, then the selection of the processes that
will enter the critical section next cannot be postponed
indefinitely.
3. Bounded Waiting. A bound must exist on the number of
times that other processes are allowed to enter their
critical sections after a process has made a request to
enter its critical section and before that request is
granted.
Operating System Concepts
Assume that each process executes at a nonzero speed
No assumption concerning relative speed of the n
processes.
7.12
Silberschatz, Galvin and Gagne 2002
Initial Attempts to Solve Problem
Only 2 processes, P0 and P1
General structure of process Pi (other process Pj)
do {
entry section
critical section
exit section
reminder section
} while (1);
Processes may share some common variables to
synchronize their actions.
Operating System Concepts
7.13
Silberschatz, Galvin and Gagne 2002
Algorithm 1
Shared variables:
int turn;
initially turn = 0
turn - i Pi can enter its critical section
Process Pi
do {
while (turn != i) ;
critical section
turn = j;
reminder section
} while (1);
Satisfies mutual exclusion, but not progress
Operating System Concepts
7.14
Silberschatz, Galvin and Gagne 2002
Algorithm 2
Shared variables
boolean flag[2];
initially flag [0] = flag [1] = false.
flag [i] = true Pi ready to enter its critical section
Process Pi
do {
flag[i] := true;
while (flag[j]) ;
critical section
flag [i] = false;
remainder section
} while (1);
Satisfies mutual exclusion, but not progress requirement.
Operating System Concepts
7.15
Silberschatz, Galvin and Gagne 2002
Algorithm 3
Combined shared variables of algorithms 1 and 2.
Process Pi
do {
flag [i]:= true;
turn = j;
while (flag [j] and turn = j) ;
critical section
flag [i] = false;
remainder section
} while (1);
Meets all three requirements; solves the critical-section
problem for two processes.
Operating System Concepts
7.16
Silberschatz, Galvin and Gagne 2002
Bakery Algorithm
Critical section for n processes
Before entering its critical section, process receives a
number. Holder of the smallest number enters the critical
section.
If processes Pi and Pj receive the same number, if i < j,
then Pi is served first; else Pj is served first.
The numbering scheme always generates numbers in
increasing order of enumeration; i.e., 1,2,3,3,3,3,4,5...
Operating System Concepts
7.17
Silberschatz, Galvin and Gagne 2002
Bakery Algorithm
Notation < lexicographical order (ticket #, process id #)
(a,b) < c,d) if a < c or if a = c and b < d
max (a0,…, an-1) is a number, k, such that k ai for i - 0,
…, n – 1
Shared data
boolean choosing[n];
int number[n];
Data structures are initialized to false and 0 respectively
Operating System Concepts
7.18
Silberschatz, Galvin and Gagne 2002
Bakery Algorithm
do {
choosing[i] = true;
number[i] = max(number[0], number[1], …, number [n – 1])+1;
choosing[i] = false;
for (j = 0; j < n; j++) {
while (choosing[j]) ;
while ((number[j] != 0) && (number[j,j] < number[i,i])) ;
}
critical section
number[i] = 0;
remainder section
} while (1);
Operating System Concepts
7.19
Silberschatz, Galvin and Gagne 2002
Synchronization Hardware
Interrupts could be disabled, but no feasible for MP, and what if
Operating System Concepts
interrupts were needed by something else in the meantime ?
Hardware support can help simplify the previous software
solutions
For example, TAS (Test And Set) i.e. target (lock) is initialized to
false, and TAS will set it to true, and return false
If it was already true, it will set it to true, and return true
Test and modify the content of a word atomically
.
boolean TestAndSet(boolean &target) {
boolean rv = target; // save the original value
target = true; // set to true
return rv; // return original value
}
7.20
Silberschatz, Galvin and Gagne 2002
Mutual Exclusion with Test-and-Set
Shared data:
boolean lock = false;
Process Pi
do {
while (TestAndSet(lock)) ;
critical section
lock = false;
remainder section
}
Operating System Concepts
7.21
Silberschatz, Galvin and Gagne 2002
Synchronization Hardware
Atomically swap two variables.
void Swap(boolean &a, boolean &b) {
boolean temp = a;
a = b;
b = temp;
}
Operating System Concepts
7.22
Silberschatz, Galvin and Gagne 2002
Mutual Exclusion with Swap
Shared data (initialized to false):
boolean lock;
boolean waiting[n];
Process Pi
do {
key = true;
while (key == true)
Swap(lock,key);
critical section
lock = false;
remainder section
}
Operating System Concepts
7.23
Silberschatz, Galvin and Gagne 2002
Semaphores
More easily extendable to generic scenarios
Synchronization tool that does not require busy waiting (or at
least as much)
Semaphore S – integer variable
can only be accessed via two indivisible (atomic) operations
wait (S): // often called P(S)
while S 0 do no-op;
S--;
signal (S): // often called V(s)
S++;
Note: As shown, these semaphores require busy waiting,
therefore they are often called, spinlocks
In MP systems, spinlocks could be valuable, since no the
process does not have to context switch when waiting on a lock,
(context switch can be expensive) so , if the waiting time is
small in the spinlock, then might be a better scenario
Operating System Concepts
7.24
Silberschatz, Galvin and Gagne 2002
Critical Section of n Processes
Shared data:
semaphore mutex; //initially mutex = 1
Process Pi:
do {
wait(mutex); // executed atomically somehow
critical section
signal(mutex); // executed atomically somehow
remainder section
} while (1);
Operating System Concepts
7.25
Silberschatz, Galvin and Gagne 2002
Semaphore Implementation
Define a semaphore as a record
typedef struct {
int value; // value of the semaphore
struct process *L; // list of processes waiting on
this semaphore
} semaphore;
Assume two simple operations:
block() suspends the process that invokes it. (places the process in a
waiting queue associated with the semaphore)
This allows the CPU scheduler to switch in a process that could
actually have work to do, rather than busy waiting for access to critical
section
wakeup(P) resumes the execution of a blocked process P. (places
process back in ready queue; however process might still wait for a
while in the ready queue before being switched back in by the
schedule … this all depends on the CPU scheduling algorithm)
Operating System Concepts
7.26
Silberschatz, Galvin and Gagne 2002
Implementation
Semaphore operations now defined as
wait(S):
S.value--;
if (S.value < 0) {
add this process to S.L;
block();
}
signal(S):
S.value++;
if (S.value <= 0) {
remove a process P from S.L;
wakeup(P);
}
Note that S.value could be negative if many processes are waiting on
semaphore S, i.e. |S.value| == num waiting
To ensure bounded waiting, add and remove processes to/from list in
FIFO order
In uniprocessor, could disable interrupts to provide atomicity for P and
V, otherwise, we could use the software solutions to the critical section
problem, where the critical sections consist of the P and V operations
themselves.
Operating System Concepts
7.27
Silberschatz, Galvin and Gagne 2002
Semaphore as a General Synchronization Tool
Execute B in Pj only after A executed in Pi
Use semaphore flag initialized to 0
Code:
Pi
A
signal(flag)
Operating System Concepts
Pj
wait(flag)
B
7.28
Silberschatz, Galvin and Gagne 2002
Deadlock and Starvation
Deadlock – two or more processes are waiting indefinitely for
an event that can only be caused by one of the waiting
processes. (dealt with in next chapter (Chap. 8))
Let S and Q be two semaphores initialized to 1
P0
P1
wait(S);
wait(Q);
wait(Q);
wait(S);
signal(S);
signal(Q);
signal(Q)
signal(S);
Starvation – indefinite blocking. A process may never be
removed from the semaphore queue in which it is suspended.
(for example, if the queueing policy is LIFO instead of FIFO)
Operating System Concepts
7.29
Silberschatz, Galvin and Gagne 2002
Two Types of Semaphores
Counting semaphore – integer value can range over
an unrestricted domain.
Binary semaphore – integer value can only be
0 and 1; can be simpler to implement, depending on
underlying hardware architecture
Can implement a counting semaphore S using two
binary semaphores.
Operating System Concepts
7.30
Silberschatz, Galvin and Gagne 2002
Implementing S as a Binary Semaphore
Data structures:
binary-semaphore S1, S2;
int C:
Initialization:
S1 = 1
S2 = 0
C = initial value of semaphore S
Operating System Concepts
7.31
Silberschatz, Galvin and Gagne 2002
Implementing Counting Semaphore: S
wait operation
wait(S): {
wait(S1);
C--;
if (C < 0) {
signal(S1);
wait(S2);
}
signal(S1);
}
signal operation
signal(S): {
wait(S1);
C ++;
if (C <= 0)
signal(S2);
else
signal(S1);
}
Operating System Concepts
7.32
Silberschatz, Galvin and Gagne 2002
Classical Problems of Synchronization
Bounded-Buffer Problem
Readers and Writers Problem
Dining-Philosophers Problem
Operating System Concepts
7.33
Silberschatz, Galvin and Gagne 2002
Bounded-Buffer Problem
Shared data
semaphore full, empty, mutex;
Initially:
full = 0 // number of occupied spots in buffer
empty = n // number of empty spots in buffer
mutex = 1 // used to control access to buffer
Operating System Concepts
7.34
Silberschatz, Galvin and Gagne 2002
Bounded-Buffer Problem Producer Process
do {
…
produce an item in nextp
…
wait(empty); // wait till there is an empty spot
wait(mutex); // mutual exclusion to critical section
…
add nextp to buffer
…
signal(mutex); // signal that you are out of critical section
signal(full); // indicate that there is not another item in buf
} while (1);
Operating System Concepts
7.35
Silberschatz, Galvin and Gagne 2002
Bounded-Buffer Problem Consumer Process
do {
wait(full); // wait till there is at least one item in buf
wait(mutex); // wait for mutual exclusion to critical section
…
remove an item from buffer to nextc
…
signal(mutex); // signal that you are out of critical section
signal(empty); // signal that there is an additonal empty spot
…
consume the item in nextc
…
} while (1);
Operating System Concepts
7.36
Silberschatz, Galvin and Gagne 2002
Readers-Writers Problem
Two classes of processes, Readers and Writers
Readers: do not modify shared data; Writers: can
If all readers, no problem, mutual exclusion not needed
If some readers and at least 1 writer, then needs access control
What policy to use ? There are several variations.
“First” readers-writers problem will be discussed here
No reader will wait unless a writer is already accessing shared data
i.e. no reader should wait on other readers when a writer is waiting
CAN CAUSE WRITERS TO STARVE
“Second” readers-writers problem preference given to writers
once a writer is ready, no new readers may enter
CAN CAUSE READERS TO STARVE
Textbook only contains references to starvation-free solutions
Let’s look more closely at the “first” version
Operating System Concepts
7.37
Silberschatz, Galvin and Gagne 2002
Readers-Writers Problem
Shared data
int readcount; // to keep track of the number of readers in CS
semaphore
mutex; // to provide mutual exclusion to the readcount variable
wrt; // to provide mutual exclusion for the writers
Initialized as follows:
mutex = 1 // at most 1 reader can modify readcount
wrt = 1 // at most 1 writer can be in critical section
readcount = 0 // no readers are initially in critical section
Operating System Concepts
7.38
Silberschatz, Galvin and Gagne 2002
Readers-Writers Problem Writer Process
wait(wrt); // wait for mutually exclusive access to CS
…
writing is performed
…
signal(wrt); // signal that this writer has left the CS
Operating System Concepts
7.39
Silberschatz, Galvin and Gagne 2002
Readers-Writers Problem Reader Process
wait(mutex); // wait for exclusive access to readcount
readcount++;
if (readcount == 1) // no other readers currently accessing
wait(wrt); // wait in case writer is accessing
signal(mutex); // signal that we’re done with readcount for the time being
…
reading is performed
…
wait(mutex); // again wait for exclusive access to readcount
readcount--;
if (readcount == 0) // if no other readers in CS,
signal(wrt); // allow a potential waiting writer in
signal(mutex): // signal that we’re done with readcount
Operating System Concepts
7.40
Silberschatz, Galvin and Gagne 2002
Dining-Philosophers Problem
Shared data
semaphore chopstick[5];
Initially all values are 1
Operating System Concepts
7.41
Silberschatz, Galvin and Gagne 2002
Dining-Philosophers Problem
Philosopher i:
do {
wait(chopstick[i])
wait(chopstick[(i+1) % 5])
…
eat
…
signal(chopstick[i]);
signal(chopstick[(i+1) % 5]);
…
think
…
} while (1);
What are some of the issues ?
Operating System Concepts
7.42
Silberschatz, Galvin and Gagne 2002
Dining-Philosophers Issues
Deadlock
Starvation (deadlock-free does not necessarily imply
starvation free)
Possible ideas to control deadlock
allow at most 4 to sit at table at the same time
Allow philosopher to only pick up chopsticks if both are
available at the same time (requires that they both be
picked up in a critical section)
Asymmetric solution: odd philo. First pick up left
chopstick, even philo. First pick up right chopstick
Operating System Concepts
7.43
Silberschatz, Galvin and Gagne 2002
Problems with using semaphores directly
Error-free system depends on programmer to correctly
use the wait() and signal() operators on the given
semaphore
Wait() must be called before entering a critical section
Signal() must be called afterward
Suppose this were not followed
Mutal exclusion could be violated
Deadlock could occur (could occur even when you are using
them correctly based on above definition)
We need something higher level to help
Operating System Concepts
7.44
Silberschatz, Galvin and Gagne 2002
Critical Regions
Help guard against certain simple errors associated with the semaphore
solution to the critical section problem
(note does not eliminate the all synchronization errors; reduces their
number)
High-level synchronization construct
A shared variable v of type T, is declared as:
v: shared T
Variable v accessed only inside statement
region v when (B) do S
where B is a boolean expression.
While statement S is being executed, no other process can access variable
v.
Operating System Concepts
7.45
Silberschatz, Galvin and Gagne 2002
Critical Regions
Regions referring to the same shared variable exclude
each other in time. (mutual exclusion)
When a process tries to execute the region statement, the
Boolean expression B is evaluated. If B is true, statement
S is executed. If it is false, the process is delayed until B
becomes true and no other process is in the region
associated with v.
Operating System Concepts
7.46
Silberschatz, Galvin and Gagne 2002
Example – Bounded Buffer
Shared data:
struct buffer {
int pool[n];
int count, in, out;
}
Operating System Concepts
7.47
Silberschatz, Galvin and Gagne 2002
Bounded Buffer Producer Process
Producer process inserts nextp into the shared buffer
region buffer when( count < n) {
pool[in] = nextp;
in:= (in+1) % n;
count++;
}
Operating System Concepts
7.48
Silberschatz, Galvin and Gagne 2002
Bounded Buffer Consumer Process
Consumer process removes an item from the shared
buffer and puts it in nextc
region buffer when (count > 0) {
nextc = pool[out];
out = (out+1) % n;
count--;
}
Operating System Concepts
7.49
Silberschatz, Galvin and Gagne 2002
Implementation region x when B do S
Associate with the shared variable x, the following
variables:
semaphore mutex, first-delay, second-delay;
int first-count, second-count;
Mutually exclusive access to the critical section is
provided by mutex.
If a process cannot enter the critical section because the
Boolean expression B is false, it initially waits on the
first-delay semaphore; moved to the second-delay
semaphore before it is allowed to reevaluate B.
Operating System Concepts
7.50
Silberschatz, Galvin and Gagne 2002
Implementation
Keep track of the number of processes waiting on first-
delay and second-delay, with first-count and secondcount respectively.
The algorithm assumes a FIFO ordering in the queuing of
processes for a semaphore.
For an arbitrary queuing discipline, a more complicated
implementation is required.
A solution for the region construct is available on p. 214
Operating System Concepts
7.51
Silberschatz, Galvin and Gagne 2002
Monitors
High-level synchronization construct that allows the safe sharing
of an abstract data type among concurrent processes.
monitor monitor-name
{
shared variable declarations
procedure body P1 (…) {
...
}
procedure body P2 (…) {
...
}
procedure body Pn (…) {
...
}
{
initialization code
}
}
Operating System Concepts
7.52
Silberschatz, Galvin and Gagne 2002
Monitors
Moves the burden of providing mutual exclusion from the
programmer to the compiler
Helps reduce race conditions, deadlocks, and other
unpredictable/irreproducible errors
Processes may call monitor procedures whenever they want to,
but they cannot directly access the monitor’s internal data
structures from procedures outside monitor
Important Property: Only 1 process can be “active” in a monitor
at any instant
Monitors are a programming language construct
i.e. the compiler knows they are special and can handle calls to
monitor procedures differently from other procedures
Compiler arranges for mutual exclusion for monitor entries,
typically through the use of binary semaphores
However, alone, this is not enough
Operating System Concepts
7.53
Silberschatz, Galvin and Gagne 2002
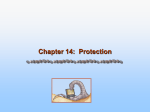
Condition Variables
We need a way for processes to block when they cannot proceed
To allow a process to wait within the monitor, a condition variable
must be declared, as
condition x, y;
Condition variable can only be used with the operations wait and
signal.
The operation
x.wait();
means that the process invoking this operation is suspended until
another process invokes
x.signal();
The x.signal operation resumes exactly one suspended process. If no
process is suspended, then the signal operation has no effect.
Operating System Concepts
7.54
Silberschatz, Galvin and Gagne 2002
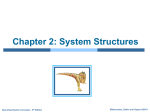
Schematic View of a Monitor
Operating System Concepts
7.55
Silberschatz, Galvin and Gagne 2002
Monitor With Condition Variables
Operating System Concepts
7.56
Silberschatz, Galvin and Gagne 2002
Dining Philosophers Example
monitor dp
{
enum {thinking, hungry, eating} state[5];
condition self[5];
void pickup(int i)
// try to pickup chopsticks
void putdown(int i)
// relinquish chopstick resources
void test(int i)
// determine if both chopsticks are free
void init() {
for (int i = 0; i < 5; i++)
state[i] = thinking;
}
}
Operating System Concepts
7.57
Silberschatz, Galvin and Gagne 2002
Dining Philosophers
void pickup(int i) {
state[i] = hungry;
test(i); // try to gain access to both resources
if (state[i] != eating) // if unsuccessful
self[i].wait(); // block
}
void putdown(int i) {
state[i] = thinking;
// test left and right neighbors to see if they were interested in eating
test((i+4) % 5);
test((i+1) % 5);
}
Operating System Concepts
7.58
Silberschatz, Galvin and Gagne 2002
Dining Philosophers
void test(int i) {
if ( (state[(I + 4) % 5] != eating) && // left not eating
(state[i] == hungry) && // you’re hungry
(state[(i + 1) % 5] != eating)) { // right not eating
state[i] = eating; // start eating
self[i].signal(); // signal that a waiting process may proceed
}
}
Operating System Concepts
7.59
Silberschatz, Galvin and Gagne 2002
Monitor Implementation Using Semaphores
Variables
semaphore mutex; // (initially = 1)
semaphore next; // (initially = 0)
int next-count = 0;
Each external procedure F will be replaced by
wait(mutex);
…
body of F;
…
if (next-count > 0)
signal(next)
else
signal(mutex);
Mutual exclusion within a monitor is ensured.
Operating System Concepts
7.60
Silberschatz, Galvin and Gagne 2002
Monitor Implementation
For each condition variable x, we have:
semaphore x-sem; // (initially = 0)
int x-count = 0;
The operation x.wait can be implemented as:
x-count++;
if (next-count > 0)
signal(next);
else
signal(mutex);
wait(x-sem);
x-count--;
Operating System Concepts
7.61
Silberschatz, Galvin and Gagne 2002
Monitor Implementation
The operation x.signal can be implemented as:
if (x-count > 0) {
next-count++;
signal(x-sem);
wait(next);
next-count--;
}
Operating System Concepts
7.62
Silberschatz, Galvin and Gagne 2002
Dining Philo.
Thus far, our solution:
ensures mutual exclusion
prevents deadlock
does not prevent starvation
The issue is centered around process resumption order
If several variables are suspended on condition x, and a
process issues x.signal(), which process should be
resumed next ?
FCFS ordering is not adequate to prevent starvation
Operating System Concepts
7.63
Silberschatz, Galvin and Gagne 2002
Monitor Implementation
Conditional-wait construct: x.wait(c);
c – integer expression evaluated when the wait operation is
executed.
value of c (a priority number) stored with the name of the
process that is suspended.
when x.signal is executed, process with smallest
associated priority number is resumed next.
Check two conditions to establish correctness of system:
User processes must always make their calls on the monitor
in a correct sequence.
Must ensure that an uncooperative process does not ignore
the mutual-exclusion gateway provided by the monitor, and
try to access the shared resource directly, without using the
access protocols.
Operating System Concepts
7.64
Silberschatz, Galvin and Gagne 2002
Solaris 2 Synchronization
Implements a variety of locks to support multitasking,
multithreading (including real-time threads), and
multiprocessing.
Uses adaptive mutexes for efficiency when protecting
data from short code segments.
Uses condition variables and readers-writers locks when
longer sections of code need access to data.
Uses turnstiles to order the list of threads waiting to
acquire either an adaptive mutex or reader-writer lock.
Operating System Concepts
7.65
Silberschatz, Galvin and Gagne 2002
Windows 2000 Synchronization
Uses interrupt masks to protect access to global
resources on uniprocessor systems.
Uses spinlocks on multiprocessor systems.
Also provides dispatcher objects which may act as wither
mutexes and semaphores.
Dispatcher objects may also provide events. An event
acts much like a condition variable.
Operating System Concepts
7.66
Silberschatz, Galvin and Gagne 2002