Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Control system wikipedia , lookup
Distributed control system wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Opto-isolator wikipedia , lookup
Electronic engineering wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Fault tolerance wikipedia , lookup
Public address system wikipedia , lookup
Music technology (electronic and digital) wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Embedded Systems Design: A Unified
Hardware/Software Introduction
Chapter 4 Standard Single Purpose
Processors: Peripherals
1
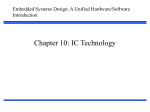
Stepper motor controller
• Stepper motor: rotates fixed number
of degrees when given a “step” signal
– In contrast, DC motor just rotates when
power applied, coasts to stop
• Rotation achieved by applying
specific voltage sequence to coils
• Controller greatly simplifies this
Sequence
1
2
3
4
5
A
+
+
+
A’
+
+
-
B
+
+
+
Vd
1
16
A’
2
MC3479P 15
A
3
14
4
13
5
12
Bias’/Set
6
11
Phase A’
Clk
7
10
CW’/CCW
O|C
8
9
Full’/Half Step
GND
Red
White
Yellow
Black
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
B’
+
+
Vm
B
B’
GND
A
A’
B
B’
2
Stepper Motor Operation
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
3
Stepper motor with controller (driver)
/* main.c */
MC3479P
Stepper Motor
Driver
10
7
void main(void){
sbit clk=P1^1;
sbit cw=P1^0;
8051
CW’/CCW
CLK
P1.0
P1.1
2 A’ B 15
3 A B’ 14
*/turn the motor forward */
cw=0;
/* set direction */
clk=0;
/* pulse clock */
delay();
clk=1;
void delay(void){
int i, j;
for (i=0; i<1000; i++)
for ( j=0; j<50; j++)
i = i + 0;
}
/*turn the motor backwards */
cw=1;
/* set direction */
clk=0;
/* pulse clock */
delay();
clk=1;
}
Stepper
Motor
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
The output pins on the stepper motor driver do not
provide enough current to drive the stepper motor.
To amplify the current, a buffer is needed. One
possible implementation of the buffers is pictured
to the left. Q1 is an MJE3055T NPN transistor
and Q2 is an MJE2955T PNP transistor. A is
connected to the 8051 microcontroller and B is
connected to the stepper motor.
+V
1K
Q1
A
B
Q2
1K
4
Stepper motor without controller (driver)
8051
P2.4
/*main.c*/
sbit notA=P2^0;
sbit isA=P2^1;
sbit notB=P2^2;
sbit isB=P2^3;
sbit dir=P2^4;
GND/ +V
P2.3
P2.2
P2.1
P2.0
Stepper
Motor
A possible way to implement the buffers is located
below. The 8051 alone cannot drive the stepper motor, so
several transistors were added to increase the current going
to the stepper motor. Q1 are MJE3055T NPN transistors
and Q3 is an MJE2955T PNP transistor. A is connected to
the 8051 microcontroller and B is connected to the stepper
motor.
+V
1K
Q1
B
+V
1K
A
Q2
330
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
void delay(){
int a, b;
for(a=0; a<5000; a++)
for(b=0; b<10000; b++)
a=a+0;
}
void move(int dir, int steps) {
int y, z;
/* clockwise movement */
if(dir == 1){
for(y=0; y<=steps; y++){
for(z=0; z<=19; z+4){
isA=lookup[z];
isB=lookup[z+1];
notA=lookup[z+2];
notB=lookup[z+3];
delay();
}
}
}
/* counter clockwise movement */
if(dir==0){
for(y=0; y<=step; y++){
for(z=19; z>=0; z - 4){
isA=lookup[z];
isB=lookup[z-1];
notA=lookup[z -2];
notB=lookup[z-3];
delay( );
}
}
}
}
void main( ){
int z;
int lookup[20] = {
1, 1, 0, 0,
0, 1, 1, 0,
0, 0, 1, 1,
1, 0, 0, 1,
1, 1, 0, 0 };
while(1){
/*move forward, 15 degrees (2 steps) */
move(1, 2);
/* move backwards, 7.5 degrees (1step)*/
move(0, 1);
}
}
5
Data conversion
Interface circuits
Anti-aliasing filter
Sample-and-hold (S/H) circuit
Analog-to-digital converter (ADC)
Digital-to-analog converter (DAC)
Reconstruction filter
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
6
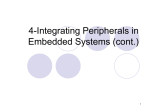
A/D and D/A transfer curves
output
Quantization error
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
7
5.0V
4.5V
4.0V
3.5V
3.0V
2.5V
2.0V
1.5V
1.0V
0.5V
0V
1111
1110
1101
1100
1011
1010
1001
1000
0111
0110
0101
0100
0011
0010
0001
0000
4
4
3
3
analog output (V)
Vmax = 7.5V
7.0V
6.5V
6.0V
5.5V
analog input (V)
A/D and D/A conversion
2
1
t1
0100
proportionality
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
t2
t3
time
t4
1000 0110 0101
Digital output
analog to digital
2
1
t1
t2
0100
t3
1000 0110
Digital input
t4
time
0101
digital to analog
8
A/D Data Converters
• Sigma Delta
– High resolution, low-to-medium
speed
• Pipelined
– Low-to-medium resolution, high
speed
• Flash
– Low resolution, high speed
• Successive approximation
register (SAR)
– Medium resolution, medium speed
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
9
SAR A/D Converter
Start
CLK
EOC
CONV
Timing
control
SAH
Vin
Sample
& hold
Successive
Approximation
Register
(SAR)
+
-
Anti-aliased signal
N bits
VDAC
Vref
DAC
N bits
Register
¾ Vref
CLK
½ Vref
Vin
Start
¼ Vref
SAH
CONV
0
Conversion time
time
bit 3=0
(MSB)
bit 2=1 bit 1=0 bit 0=1
(LSB)
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
EOC
10
A/D conversion using successive
approximation
Given an analog input signal whose voltage should range from 0 to 15 volts, and an 8-bit digital encoding, calculate the correct encoding for
5 volts. Then trace the successive-approximation approach to find the correct encoding.
5/15 = d/(28-1)
d= 85
Encoding: 01010101
Successive-approximation method
½(Vmax – Vmin) = 7.5 volts
Vmax = 7.5 volts.
0
0
0
0
0
0
0
0
½(5.63 + 4.69) = 5.16 volts
Vmax = 5.16 volts.
0
1
0
1
0
0
0
0
½(7.5 + 0) = 3.75 volts
Vmin = 3.75 volts.
0
1
0
0
0
0
0
0
½(5.16 + 4.69) = 4.93 volts
Vmin = 4.93 volts.
0
1
0
1
0
1
0
0
½(7.5 + 3.75) = 5.63 volts
Vmax = 5.63 volts
0
1
0
0
0
0
0
0
½(5.16 + 4.93) = 5.05 volts
Vmax = 5.05 volts.
0
1
0
1
0
1
0
0
½(5.63 + 3.75) = 4.69 volts
Vmin = 4.69 volts.
0
1
0
1
0
0
0
0
½(5.05 + 4.93) = 4.99 volts
0
1
0
1
0
1
0
1
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
11
Analog-to-digital converters
Example: You have a 12 bit A/D and the range of the A/D is -1V
to 1V. If the output of the A/D is: “001010111111”
what analog voltage is at the input?
We are trying to determine the analog input which is e.
e/Vmax = d/(2n – 1)
e/(1 – (-1)) = d/(2n – 1); note: the range is shifted by 1V
d = “001010111111” = 703; n = 12; 2n = 4096;
e/2 = 703/(4096 – 1) = 703/4095 = 0.1716722
e = 0.343345; shifted back e = -1 + 0.343345
= -0.656654
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
12
Exercises
1. You have a 4-bit ADC which has an input range from
2V to 3V. It is sending the value “1110.” What is the
analog input? Can you determine the tolerance (ie:
accuracy) of you answer?
2. A 16 bit A/D with a 0 to 5V range has it’s 8 most
significant bits connected to an 8 bit D/A with a
range of 0 to 5V. If the input to the A/D is 3.700V
what is the output of the D/A?
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
13
Interface with the microcontroller
fs
Anti-alias filter
Dout
mp
ADC
Sample
and hold
Vin
fs/2
EOC Vr+
Start Vr-
Driver
Din
mp
I+
I-
IV
DAC
EOC Vr+
Start
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
14
Real-time Clock (RTC)
• Much like a digital wristwatch, keeps the time and date
• Typically composed of a crystal-controlled oscillator, numerous
cascaded counters and a battery backup
• The crystal controlled oscillator generates a very consistent high
frequency digital pulse that feeds the counters
• Operation:
– The 1st counter counts up to the oscillator frequency (Example: f = 32.768kHz,
first counter counts 32768 or 215, corresponding to 1 sec)
– At this point the 1st counter generates a pulse that feeds the 2nd counter that
counts up to 59 and generates a pulse that feeds the 3rd counter
– The 3rd counter counts up to 59 and so on...
– The hour, date, month and year counters work in a similar fashion
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
15
Real-time Clock
• Provides a time-of-day clock and 100-year calendar
with alarm features and battery operation.
mp
Embedded Systems Design: A Unified
Hardware/Software Introduction, (c) 2000 Vahid/Givargis
16